飛思卡爾智能車路障算法控制
2019-09-10 01:52:45張秀才
錦繡·下旬刊 2019年11期
張秀才
摘 要:為了能夠使智能車快速、準確、穩定的檢測和通過路障,本文依據MK60DN512ZVLQ10微控制系統介紹了在檢測路障時距離傳感器、姿態方位傳感的選擇;把智能車通過路障過程分為四個階段分別對應智能車所處于不同的位置分別進行控制的算法,提升了智能車通過路障的平順性。
關鍵詞:智能車;算法控制;傳感器
一、引言
隨著社會的的發展,智能汽車的研究成為人們的一個熱點。智能汽車需要具有環境感知、環境特征元素的的識別、路徑的自動規劃的能力。本文以飛思卡爾智能車競賽為背景,以MK60DN512ZVLQ10微控制系統為核心,對賽道元素中出現的路障元素進行準確的識別和路徑規劃,進而達到準確識別、快速響應、準確通過的目的。
二、傳感器的選擇
(一)測距傳感器
使用GP2Y0A21YK0F測量距離傳感器模塊。該種傳感器由PSD、IRED、信號處理電路三部分組成。采用三角測量方式,所以被測物體的材質、環境溫度以及測量時間都不會影響傳感器的測量精度。傳感器通過把距離障礙物的距離的遠近轉化成電壓的大小,電壓的大小與障礙物的遠近在的測量范圍呈線性的關系。所以智能車在行駛時通過單片機上的ADC模塊采集傳感器反饋回來電壓大小來近似的模擬智能車距離障礙物遠近。
(二)姿態傳感器
使用mma8451+mpu3050型號的三軸加速度+三軸陀螺儀傳感器來測量智能車的姿態。姿態傳感器的軸垂直于地面向上,軸的方向垂直于智能車車身,軸的方向是車身的方向。所以通過對軸方向的角速度進行積分得到在軸方向移動的角度,通過計算出來的角度就可以知道智能車與車身方向之間的夾角。
三、控制算法
首先在智能車上安裝兩個測距傳感器和一個姿態傳感器。兩個測距傳感器分別安裝在汽車的前面和側面,姿態傳感器安裝在汽車的中心位子來測量汽車與車身之間的夾角。
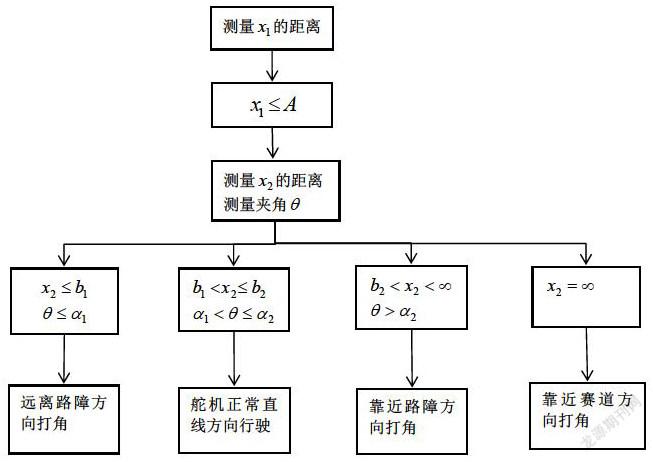
MK60DN512ZVLQ10微控制系統通過ADC模塊采集安裝在智能車前面測距傳感器反饋回來的電壓值的大小來估算當前智能車所距離障礙物的距離。當測量的距離小于你設定的閾值時,這時智能車的舵機開始動作,同時智能車側面的測距傳感器和姿態傳感器開始工作。側面的測距傳感器測量智能車距離路障的距離,姿態傳感器測量智能車與車身之間的夾角。當的距離小于等于,角度小于時,這時智能車距離路障的距離比較近,此時舵機的動作是遠離路障的方向進行打角;當的距離大于小于等于,角度大于小于時,這時智能車距離路障比較合適的位置,此時舵機的動作是保持直線的方向進行打角;當的距離大于小于無窮大時,角度大于時,這時智能車距離路障比較遠的距離,此時舵機的動作是靠近路障方向打角;當的距離為無窮大時,說智能車已經經過路障,此時智能車需要回線處理。此時舵機的動作靠近賽道方向進行打角,當汽車檢測到賽道之后根據電感檢測到的大小進行正常的行駛。具體流程圖如下
四、結束語
本文根據姿態傳感器、測距傳感器的具體安裝位置以及測量范圍從而選擇了GP2Y0A21YK0F紅外測距傳感器和mma8451+mpu3050姿態方位傳感器,以及針對智能車所處于的不同情況進行不同的處理方法,根據調試結果說明該控制算法是可行的。
參考文獻
[1]卓晴.學做智能車:挑戰“飛思卡爾”杯[M].北京:北京航天航空大學出版社,2007
[2]邵貝貝.單片機嵌入式應用的在線開發方法[M].北京:清華大學出版社,2004
[3]第六屆“飛思卡爾”杯大學生智能汽車競賽北京科技-電磁二隊技術報告,2011,8.
[4]張毅剛,彭喜元.單片機原理與應用設計[M].北京:電子工業出版社,2010,59C7D7050-EDAE-49E0-8CE9-181469703361
