基于圖像處理技術的四旋翼定點降落研究
2019-09-10 10:51:14任麗莉李申亮楊鳳濱
長春師范大學學報 2019年8期
任麗莉,李申亮,楊鳳濱,滕 悅,康 冰
(1.長春師范大學高性能計算中心,吉林長春130032; 2.吉林大學通信工程學院,吉林長春130022;3.中國石油遼陽石化公司,遼寧遼陽111003)
近年來,四旋翼飛行器逐漸成為航空學術研究中新的前沿和熱點。四旋翼飛行器是一種能實現垂直起降的非共軸式多旋翼飛行器[1],可以只通過調節蝶形分布的四個旋翼的轉速,實現對四旋翼飛行器飛行姿態的控制。由于不需要尾翼,四旋翼飛行器結構更加緊湊,四個旋翼的提升力比單旋翼更加均勻,因而飛行姿態更加穩定。另外,四旋翼飛行器還具有起飛要求低、可懸停等特點[2]。其典型代表分別是:瑞士洛桑聯邦科技學院的OS4、賓夕法尼亞大學的HMX4和佐治亞理工大學的GTMARS[3]。地面控制系統是四旋翼飛行控制系統的重要組成部分,在數據接收、圖像處理、任務規劃等方面有著不可或缺的作用[4]。能夠控制四旋翼定點精確降落的地面站系統在日后四旋翼的集群化管理方面有重要的作用。本系統綜合了嵌入式控制、無線通訊、圖像處理和自動控制等技術,可用于相關專業本科生的實驗教學系統。
1 試驗方法和試驗方案
1.1 試驗方法
在專門的四旋翼調試場地進行四旋翼的試飛和調試工作。場地大小10 m×7 m×2.5 m,在金屬框架四軸固定繩網,為防止意外事故人員于場地外調試。四旋翼飛控芯片使用STM32F103系列單片機,地面站采用USB彩色廣角攝像頭,在QT平臺上使用OPENCV庫進行圖像處理上位機的構建。
1.2 試驗方案
購買相關元器件進行四旋翼硬件的搭建,在恒拓開源飛控程序的基礎上編寫相關的控制函數,如自動起降、定點定高和無線通信程序,之后在場地內進行調試。在計算機上進行圖像處理上位機環境的配置和程序的編寫工作,并進行二者聯動調試。
2 數學模型
歐拉角特別適合描述物體的姿態和方向[5](圖1),但由于其含有三角運算導致程序實現效率不高,基于四元數的姿態角(圖2)表示比較復雜但程序上容易實現,因此四旋翼的姿態解算采取的是先獲得關于四旋翼旋轉信息的四元數,再將四元數轉換成歐拉角的方法。
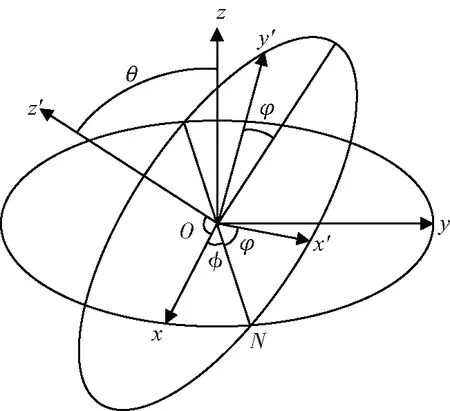
圖1 歐拉角表示坐標軸旋轉

圖2 四元數表示姿態變換
φ,θ,ψ分別為四旋翼對X,Y,Z軸的夾角。四元數是一種有四個自由度的超復數,定義如下:
(1)
向量(i,j,k)T指旋轉軸,w刻畫繞該軸旋轉的角度值。飛行器姿態可以看作繞通過機體坐標原點的某軸旋轉一定角度得到的。二者之間有如下的轉換關系:
(2)
(3)
在四旋翼的姿態控制部分,采用的是串級PID控制策略,即外環的輸出作為內環的輸入。外環為角度環,內環為角速度環。將四旋翼當前姿態角與目標姿態角比較得到姿態角偏差,作為PID控制器的輸入,輸出4個電機的控制量。相應流程圖如圖3所示,其中,t表示throttle,p表示pitch,r表示roll,y表示yaw。
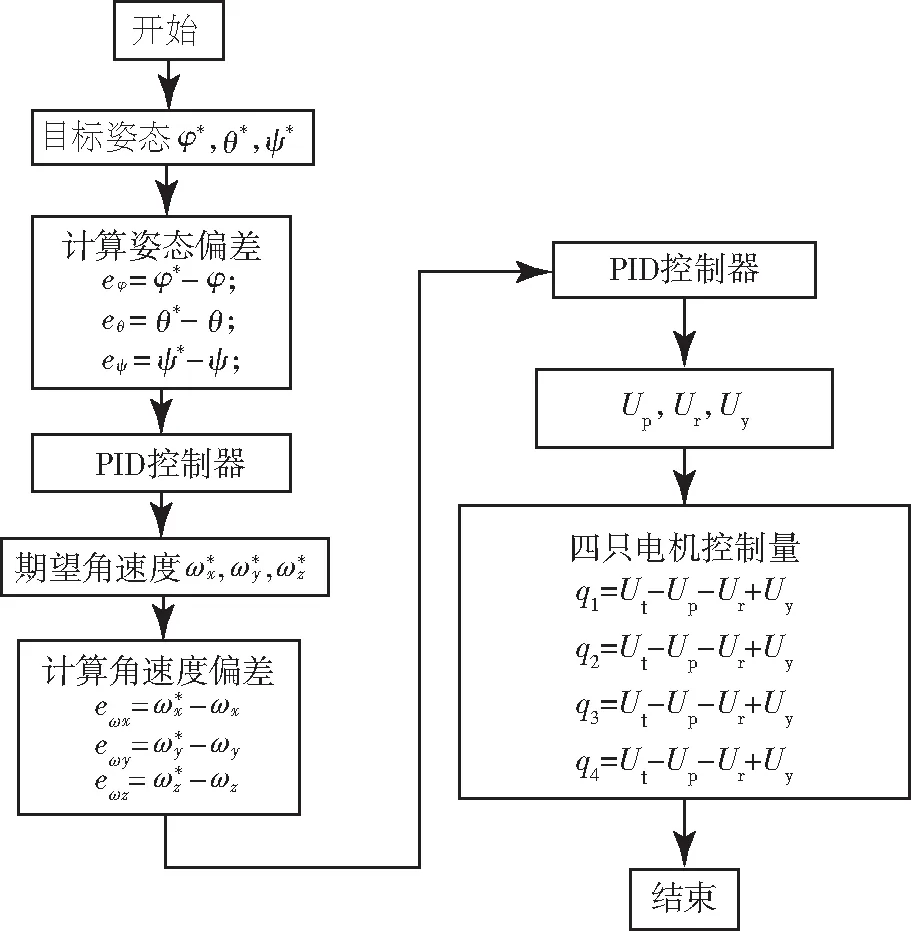
圖3 串級PID下的四旋翼姿態調節過程
在四旋翼的水平控制部分,使用了Pix4Flow光流傳感器模塊,該模塊通過檢測圖像中明暗點的變化情況可以得到四旋翼的對地速度。將四旋翼實際對地速度與目標速度比較得到偏差,經過PID控制調節得到輸出為目標姿態角,再通過姿態控制串級PID最終輸出為4個電機的控制量。相應流程圖如圖4所示。
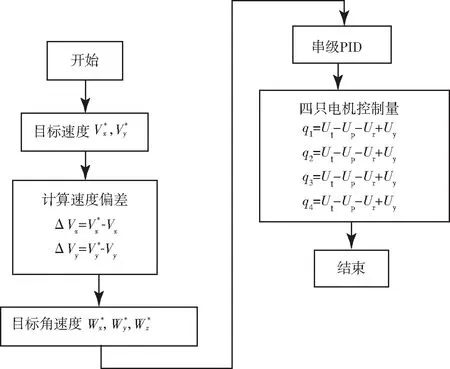
圖4 水平位置調節過程

圖5 圖像處理過程
圖像處理部分中,二值化操作使用的是inRange函數,該函數可根據設定的HSV閾值對圖像進行二值化轉換。腐蝕膨脹操作使用morphologyEx函數,該函數可根據初始條件進行相應次數的形態學濾波,包括腐蝕膨脹、開運算閉運算等。使用findContours獲取輪廓信息,最后使用QT5自帶的QserialPort類進行串口發送輪廓信息,包括輪廓大小、中心坐標和數量。圖像處理過程如圖5所示。
3 計算結果與比較
為了檢驗系統的可靠性和穩定性,在調試場地進行了大量的調試工作。
圖6顯示的是四旋翼定高飛行時的狀態信息,其中曲線表示的是高度信息,可以算出整個過程的上升時間Tr=3.125 s,調節時間Ts=7.950 s,超調量為8.75%,滿足控制要求。圖7顯示的是圖像處理對于四旋翼的黑色底架識別效果。圖像處理系統將識別到的物體的坐標信息通過藍牙發送給四旋翼,四旋翼自身根據自身的坐標信息不斷調整自身位置。
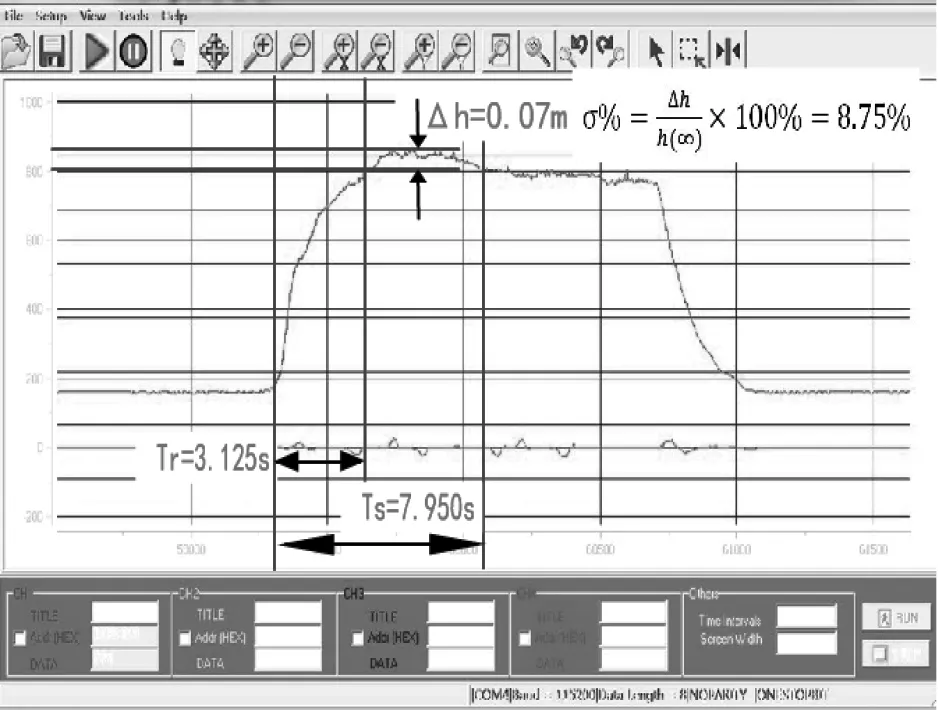
圖6 四旋翼實際飛行效果
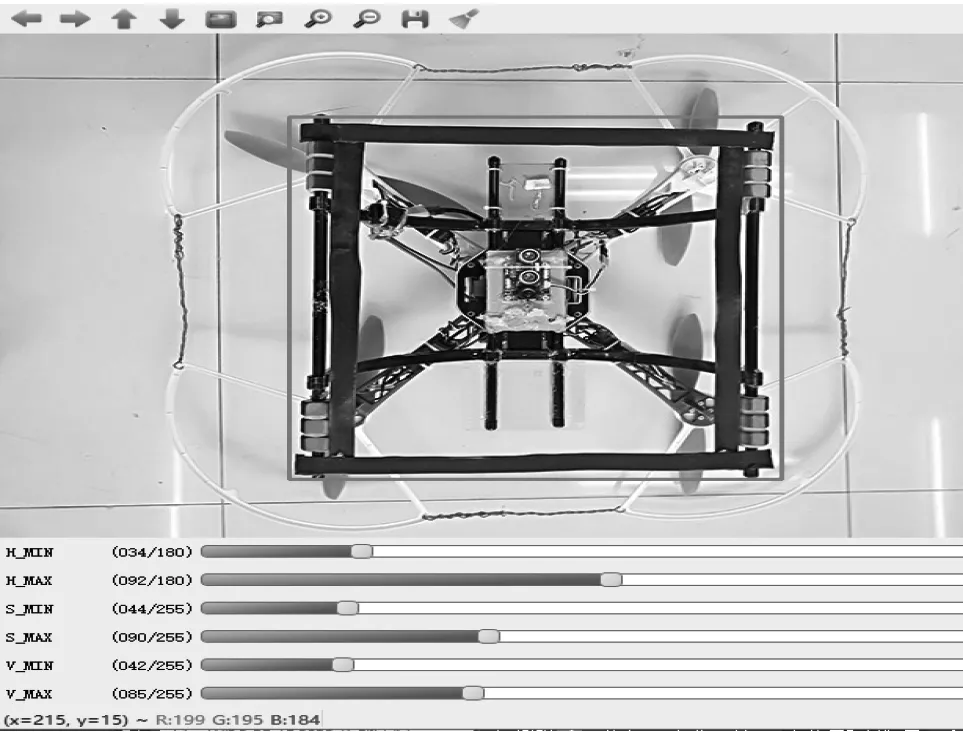
圖7 實際識別效果
圖8中4條曲線分別代表4個電機的轉速信息,顯示的是四旋翼朝某一方向進行水平位置的調節。圖9為場地示意圖。
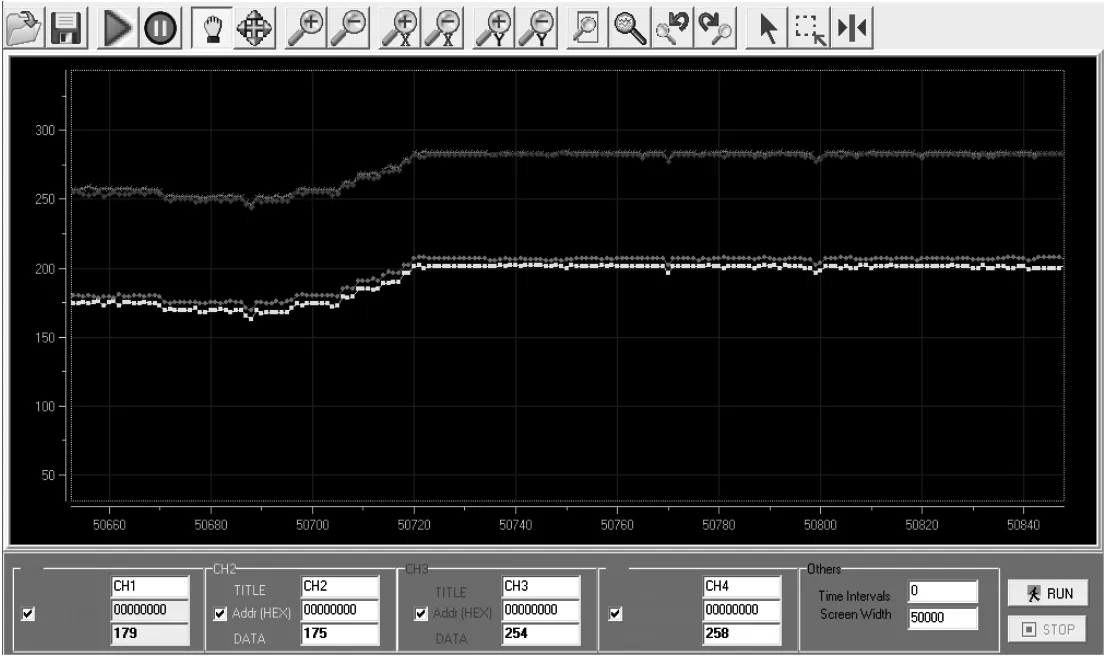
圖8 飛行數據信息
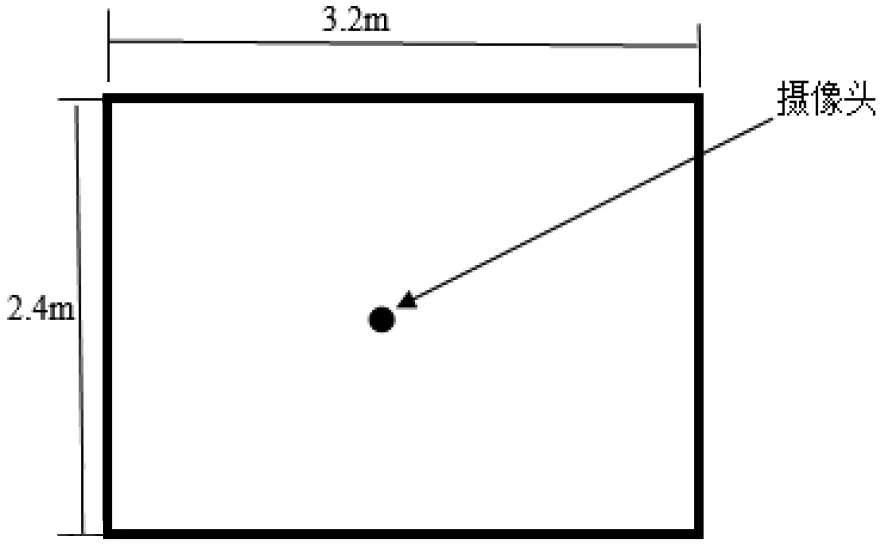
圖9 場地示意圖
從表1可以看出,在光照條件良好,無側光影響的中午測試結果較好。在傍晚時刻,由于側光對于四旋翼底部有影響會導致識別出現一定程度的偏差。
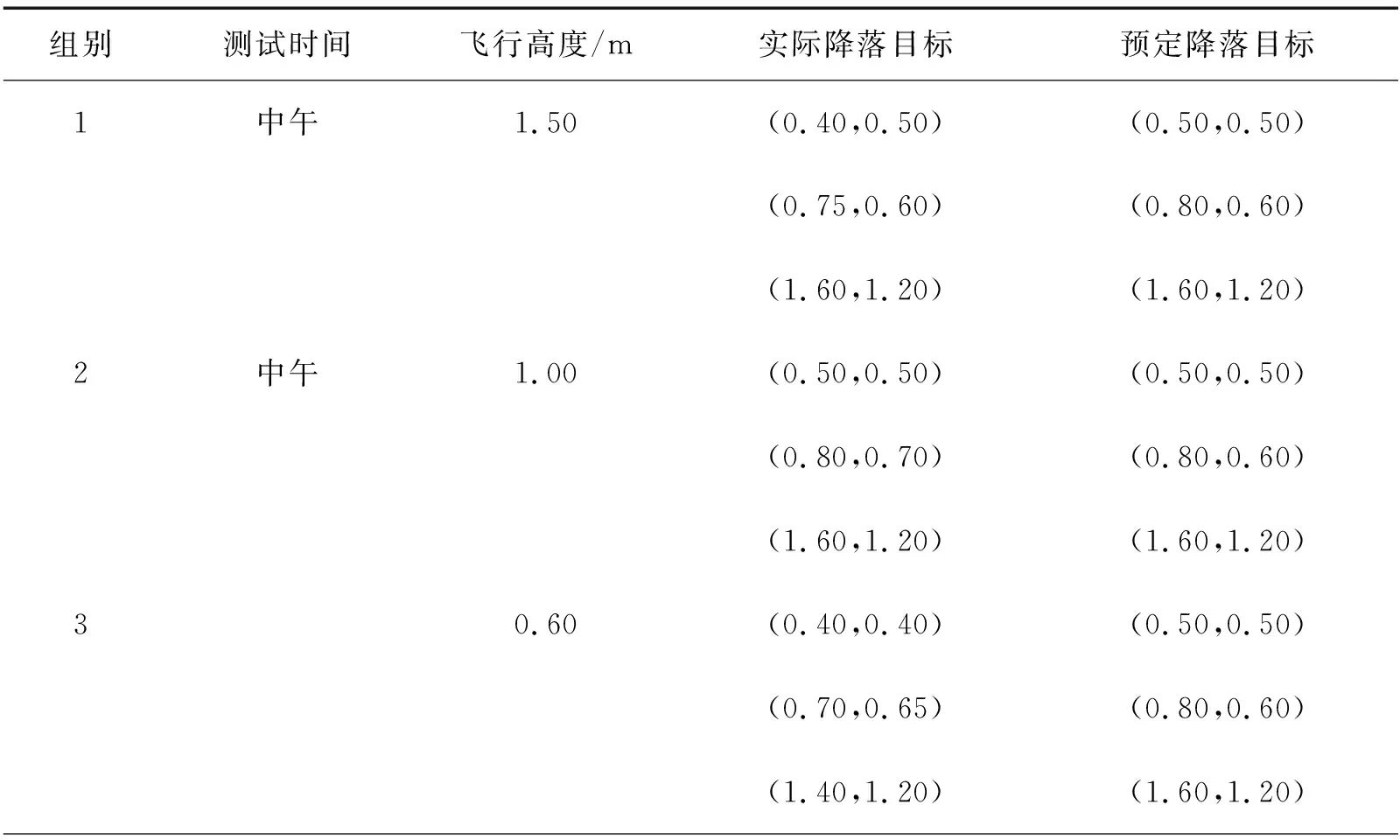
表1 測試結果
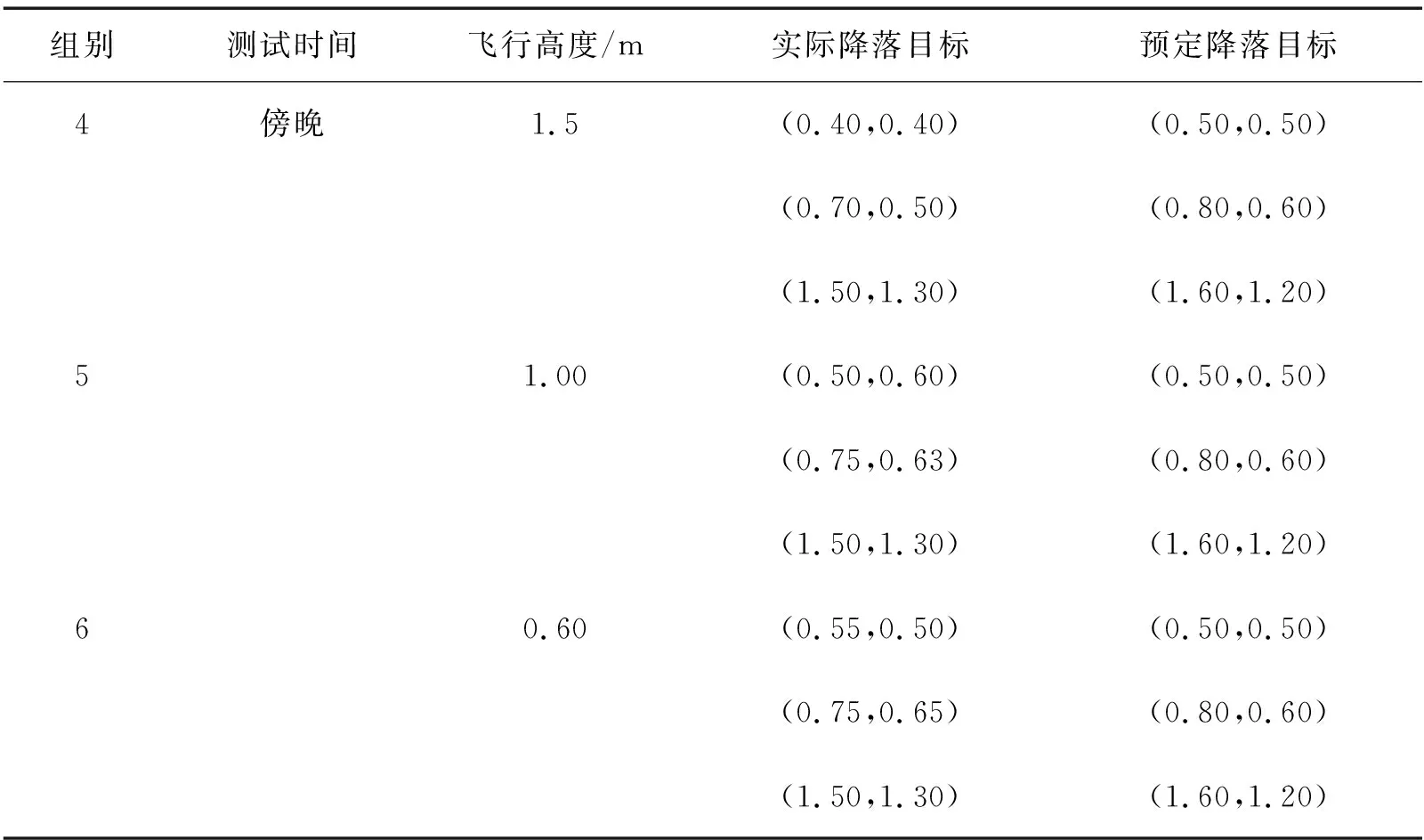
續表
4 結語
綜上所述,將計算機圖像處理技術運用于四旋翼飛行器中,建立了一套近距離定點自動降落系統,為四旋翼的定點降落提供了一種新的解決思路。由于場地因素實驗條件限制,未能對現實中各種復雜的情況加以模擬,有待進一步優化。
猜你喜歡
電子制作(2018年12期)2018-08-01 00:47:44
中華手工(2017年2期)2017-06-06 23:00:31
中國核電(2017年1期)2017-05-17 06:10:11
電子制作(2017年19期)2017-02-02 07:08:38
當代化工研究(2016年6期)2016-03-20 16:21:46
中國房地產業(2016年2期)2016-03-01 01:25:18
西部廣播電視(2015年5期)2016-01-16 03:45:05
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
