基于機器視覺的自動扶梯梯級測速方法
2019-11-18 05:43:18王桔張斌應征李建馬錦程
中國測試 2019年8期
關鍵詞:機器視覺
王桔 張斌 應征 李建 馬錦程


摘要:針對自動扶梯運行速度的檢測,提出一種基于機器視覺的自動扶梯梯級測速方法。首先,對機器視覺系統采集得到的梯級運行圖像進行一系列的預處理,通過設置閾值實現目標顏色的識別;然后,采用直線掃描法對顏色提取后的不連通區域進行填充,對得到的二值圖像進行邊緣檢測與輪廓識別,返回輪廓面積最大的圖像;最后,提取每張圖像中黃色區域右邊界直線起始端點的橫坐標,通過差分法計算得到梯級的速度。結果表明,該方法實現了非接觸測量并且能夠得到較為準確的檢測結果。
關鍵詞:機器視覺;速度;差分法;自動扶梯
中圖分類號:TP391 文獻標志碼:A 文章編號:1674-5124(2019)08-0044-06
0 引言
如今,自動扶梯廣泛應用于我們的日常生活中,尤其是商場、地鐵車站、醫院等人流量較為密集的公共場所,人們在享受著它帶來的便捷的同時也不能忽略其潛在的安全隱患[1]。據統計,近些年來自動扶梯事故發生率呈逐年上升趨勢,對扶梯乘客的身心和財產都構成了巨大的威脅,因此,對于自動扶梯的運行參數進行定期檢測是保障扶梯的安全運行的重要舉措[2]。
我國2011年出臺的GB 16899-2011《自動扶梯和自動人行道的制造與安裝安全規范》[3]中,新增和改進了對自動扶梯和人行道檢測檢驗的許多要求,其中,對自動扶梯扶手帶與踏板、梯級的速度檢測還作了強制性規定。
目前我國針對自動扶梯的梯級或扶手帶的速度測量,仍沿用轉速表人工測量的方式,存在誤差大和讀數不穩定的缺點[4]。有關單位研究設計的一些基于光電式編碼器[5-6]的自動扶梯運行參數測試工具[7-9],一般采用接觸式的測量方式,通過檢測測速輪的滾動速度間接測量被測物體的直線運動速度、位移信息。此種方法對于測試設備的安裝要求較高,為了避免引入不必要的誤差,測速輪滾動的線速度方向要與被測物體的直線運動速度方向盡可能保持一致[10]。而且接觸式的設備容易附著被測物體上的灰塵、油污等附加物,也會因為測速輪的接觸磨損,影響測量精度。
由于機器視覺測量系統可以實現非接觸式測量且測量精度也能夠達到項目實際需要,因此借助機器視覺測速是國內外學者研究的熱點之一[11-13]。機器視覺中的運動檢測方法很多,如光流法、塊匹配運動分析法、圖像序列幀差法等,其中圖像序列幀差法是一種易于操作且十分有效的方法,場景中的目標的運動狀況都會體現在圖像序列的變化上[14-15]。
為了克服市面上接觸式測量儀的一些精度缺陷,本文提出一種基于機器視覺的自動扶梯梯級測速方法,通過對機器視覺系統采集得到的自動扶梯梯級運行圖像進行目標顏色識別、直線掃描填充、輪廓識別、直線提取、速度計算等多步處理,能夠有效地實現自動扶梯梯級運行速度的測量。
1 系統構架
1.1 硬件構架
機器視覺測速系統的硬件部分主要包括工業攝像機、鏡頭、計算機等器件。自動扶梯梯級的運行圖像主要是通過工業攝像機和鏡頭配合進行拍攝,然后圖像通過USB或者千兆以太網接口傳輸到計算機,由計算機內部的軟件系統進行一系列的圖像處理提取得到特征值,并通過數據分析計算最終實現梯級的速度測量。
如圖1所示,工業相機及其支架擺放在自動扶梯出人口處進行水平梯級運行圖像的拍攝。
1.2 軟件構架
機器視覺測速系統的軟件部分主要包括圖像目標顏色識別、直線掃描與填充、輪廓檢測、特征值提取、梯級速度計算等模塊,如圖2所示。
2 圖像處理
2.1 提取目標顏色
在進行目標顏色的提取之前首先需要對圖像進行一些簡單的預處理,整體步驟如圖3所示。
一般情況下,攝像機拍攝時容易將自動扶梯除梯級以外的某些部位拍攝進去,因此為了排除干擾,可以通過設置感興趣區域只留下圖像中與梯級有關的區域。其次,為減少光照變化對圖像顏色本質的影響,可將圖像的顏色空間由RGB轉換到HSVo然后通過設置飽和度上、下限值,亮度上、下限值,色度上、下限值這6個閾值參數完成對目標顏色的識別。顏色識別后,針對圖像上仍存在的一些離散的噪點,采用中值濾波濾除,并且保護了圖像的邊緣信息。梯級圖像目標顏色的提取如圖4所示。
2.2 直線掃描與填充
由于梯級黃色區域的不連通,顏色提取降噪后的圖像也是由若干個不連通的小區域構成的,為了提高后續輪廓提取工作的可操作性,需要對這些不連通區域進行最大化連通。由于實際拍攝的角度存在不確定性,因此本文采用0°~180°直線掃描填充的方法,找到最佳填充角度并返回白色區域面積最大的圖像。具體算法如下:
第一步:如圖5(a)所示,以圖像的左上角為原點O,水平向右為u軸正方向,豎直向下為v軸正方向建立坐標系。圖像的橫、縱坐標的最大值分別為umax、vmax。
第二步:令θi(0°≤θi≤180°)為坐標平面中第i組掃描直線與u軸正方向的夾角,滿足:
θi=0+i△θ(i=0,1,2,…)(1)其中,△θ為設定的固定角度增量。
第三步:根據式(1)中的θi構造與之對應的第i組平行掃描直線lij,j=0,1,2,…,umax。令k=vmax/umax。
當0°≤θi<90°時,直線lij滿足:
u0=j
v0=-jk+vmax(2)
v=(u-u0)tanθi+v0其中,u0、v0分別為圖像平面副對角線上的點的橫、縱坐標值。
當θi=90°時,直線lij滿足:
u=j(3)
當90°<θi≤180°時,直線lij滿足:
u0=j
v0=kj
v=(u-u0)tanθi+v0其中,u0、V0分別為圖像平面主對角線上的點的橫、縱坐標值。
第四步:當掃描直線與圖像邊界相交時,則該直線為有效直線,對該直線上每一像素點的像素值進行判斷,統計每一條直線上的白色亮點個數,若亮點個數大于等于設定閾值n,則將該直線所有像素點填充為白色,反之則將該直線所有像素點填充為黑色。
令j=j+1,重復第三步的工作,若直線lij與圖像邊界不相交,且θi<180°,則說明第i組平行線全部掃描結束。利用Gamy邊緣檢測法查找圖像經第i組平行直線掃描并進行像素點填充后的輪廓,同時計算輪廓的面積Si。一般來說,θi與Si一一對應。
令i=i+1、j=0,重復第二步的工作。若直線lij與圖像邊界不相交,且θi>180°,說明對該圖像的掃描工作全部完成。篩選θi對應的輪廓面積Si,返回輪廓面積最大的二值圖像,對它進行下一步處理。
當θi處于不同角度范圍時,所對應的平行直線組掃描示意圖如圖5(b)、(c)、(d)所示,為了直觀可見,將圖中的平行直線組中相鄰直線的間隔進行了放大。
2.3 提取特征值
如圖6所示,將返回得到的最大面積輪廓圖像利用概率霍夫變換進行直線提取。令黃色區域左右兩條邊界直線分別為l1、l2,其起始端點的橫坐標分別為u1、u2,黃色區域的寬度為w1。圖7是相機水平拍攝的自動扶梯自上往下運行時,梯級黃色區域左、右邊界直線l1、l2在感興趣區域內的移動動態圖,根據圖7可知,當自動扶梯自上往下運行時,當黃色區域開始進入感興趣區域時,只能提取到右邊界直線l2,且滿足|u2|sinθi
3)相機的拍攝誤差
在實際操作中,相機拍攝的誤差主要有采樣誤差和超時誤差。采樣誤差主要指由于工業相機時鐘頻率不穩導致圖像的采樣間隔不一致所引起的誤差,而超時誤差則是由千兆網相機調試時由于心跳超時導致設備掉線所引起的。針對圖像的采樣誤差,可在圖像采集程序中選用高精度定時器,掉線問題可以通過增加心跳超時時間的方式來解決。
4)圖像處理誤差
影響圖像處理精度的因素主要包括圖像噪聲、顏色提取過程中3個閾值的設置、直線掃描填充過程中的亮點閾值的設置等。噪聲問題可以根據圖像的噪聲特點選擇合理的濾波方式得到有效改善。其余兩個閾值設置也可以通過多次實驗調整找到最優方案。
5)最小二乘法擬合誤差
最小二乘擬合誤差主要存在于對圖像處理后采集得到的離散點進行多項式擬合的過程中,通過比較方差和確定系數的大小來確定最優擬合方案。
一般來說,和方差越小且確定系數越接近1,則表示擬合的精度越高。通過選用合適的擬合方案能夠有效減少誤差。
工業相機拍攝幀率的大小對最小二乘擬合精度也有一定的影響,因此在條件允許的情況下,選用拍攝幀率較高的工業相機能夠有效提高實驗精度。
其中以上影響誤差的因素中,主要影響因素為圖像處理誤差和最小二乘擬合誤差。
4 實驗分析
如圖9所示為梯級運行圖像采集示意圖,本實驗采用大恒水星MER-504-10GC-P CCD相機配合M1614-mp五百萬像素定焦鏡頭進行拍攝。相機的拍攝頻率為f=9.89Hz,測量得到梯級的寬度為l=0.325m,采集得到的圖像經過縮放以及感興趣區域提取后的實際大小為612像素×512像素。通過攝像機拍攝了一百張左右的圖像,提取得到的離散點經最小二乘法擬合后的結果如圖10所示。
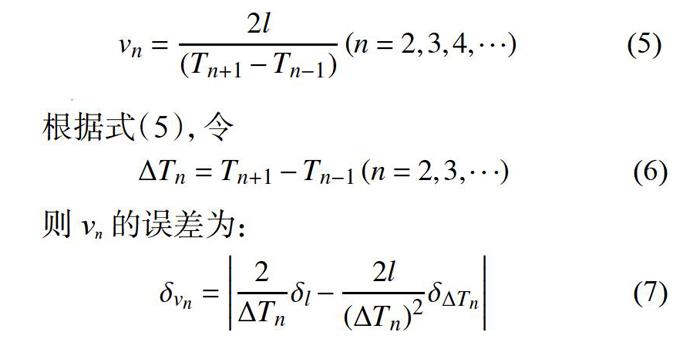
經過多項式的根求解分別得到每次梯級黃色區域右邊界直線l2起始端點進入感興趣區域的時間Tn(n=1,2,3,…),再根據公式(5)計算對應的瞬時速度vn(n=2,3,4,…),計算結果如圖11所示。
根據上述實驗結果進行誤差的估算,l=0.325m,△Tn≈1.6s,則當δl=0.0001m,δ△Tn如果按△Tn的10%進行估算,得到δvn為0.04m/s。在實際檢測中,若采用幀率更高的工業相機則測量精度能夠有效提升。
5 結束語
1)本文提出一種基于機器視覺的自動扶梯梯級測速方法,通過對攝像機采集得到的自動扶梯梯級運行圖像進行目標顏色的識別、直線掃描填充、輪廓識別、直線提取、速度計算等多步處理,能夠有效地實現自動扶梯梯級運行速度的測量。
2)攝像機采集圖像的速度對差分法計算結果影響較大,實際應用時可根據需要使用較高速率的攝像機進行測量,以提高測量精度。
參考文獻
[1]袁桂芳,曹丹琪.自動扶梯扶手帶與梯級運行速度允差的快速判定[J].中國設備工程,2004,4:27.
[2]劉易鑫,魏斌,鄭徐豪一種基于MCU的自動扶梯測量儀設計和實現[J].國外電子測量技術,2012,31(8):35-39.
[3]自動扶梯與自動人行道的制造與安全規范:GB16899-2011[S]北京:中國質檢出版社,2011.
[4]梁敏健,戚政武,楊明祥.一種自動扶梯運行參數快速精確檢測方法的設計與實現[J].中國特種設備安全,2016,32(4):29-32.
[5]韓旭東,徐新行,劉長順.用于星載激光通信終端的絕對式光電角度編碼器[J].光學精密工程,2016,24(10):2424-2431.
[6]KAPLAY E V.Identification and compensation of staticerrors in the phase coordinates of elements of an opticalencoder[J].Measurement Techniques,2014,57(5):493-500.
[7]唐躍林,鄭徐豪,昊德操,等.一種基于ARM處理器ATM32的手持式智能化自動扶梯同步率測試儀研制[J].國外電子測量技術,2014,33(8):65-68.
[8]鄒亮華.自動扶梯扶手帶速度信號采集的研究[J].機電工程技術,2013,42(8):119-121.
[9]KOKUYAMA W,WATANABE T,NOZATO H,et al.Angular velocity calibration system with a self-calibratablerotary encoder[J].Measurement,2016,82:246-253.
[10]賈興丹,萬秋華,趙長海,等.光電式編碼器測速方法現狀與展望[J].儀表技術與傳感器,2018(3):102-107.
[11]陳榮保,趙聃,王乾隆.基于圖像處理的前方行駛車輛速度測量方法[J].傳感器與微系統,2018,37(4):17-23.
[12]SUNDORO H S,HARJOKO A.Vehical counting and vehiclespeed measurement based on video processing[J].Journal ofTheoretical and Applied Information Technology,2016:233-241.
[13]LAN J,LI J,HU G,et al.Vehicle speed measurement basedon gray constraint optical flow algorithm[J].Optik-InternationalJournal for Light and Electron Optics,2014,125(1):289-295.
[14]隨宗賓,高楊,梁宇,等.基于車牌識別的機混車道視頻測速算法[J].現代電子技術,2015,38(18):125-127.
[15]MADASU V K.HANMANDLU M Estimate of vehicle speedby motion tracking on image sequences[J].IntelligentVehicles Symposium IEEE,2010,43(6):185-190.
(編輯:徐柳)
猜你喜歡
軟件導刊(2016年11期)2016-12-22 21:52:17
電腦知識與技術(2016年28期)2016-12-21 12:13:14
科技視界(2016年26期)2016-12-17 17:31:58
科技視界(2016年25期)2016-11-25 19:53:52
科技視界(2016年25期)2016-11-25 09:27:34
科教導刊(2016年25期)2016-11-15 17:53:37
軟件工程(2016年8期)2016-10-25 15:55:22
科技視界(2016年20期)2016-09-29 11:11:40
科技視界(2016年6期)2016-07-12 09:12:40
科技視界(2016年15期)2016-06-30 19:03:30
