開關磁阻直線電機的設計及其推力優化
2020-03-24 12:00:08馬霽旻萬梓燦萬子威
微特電機 2020年3期
馬霽旻,萬梓燦,王 杜,萬子威
(1. 湖北工業大學,武漢 430068; 2. 智新科技股份有限公司,武漢 430056)
0 引 言
開關磁阻電機(以下簡稱SRM)是一種雙凸極結構電機,其在轉子位置不包含磁鋼及線圈,結構較簡單,可靠性較強,可應用于紡織行業及伺服驅動系統。開關磁阻直線電機(以下簡稱LSRM)是由旋轉式開關磁阻電機沿徑向展開形成,是其一種結構上的延伸。開關磁阻直線電機繼承了傳統開關磁阻電機的優點,具有結構簡單、容錯性能強及控制靈活等特點,并且區分于傳統直線電機,它還具有直接將電能轉化成機械能的能力,因此,可靠性、精度、系統結構等方面有明顯的優勢。
JMAG仿真軟件是一種功能齊全、應用廣泛的電磁場分析軟件。JMAG相較于其它有限元分析軟件,擁有完善的自學系統,能讓新手在短期內迅速掌握,各個分析模塊也可在condition界面中拉出,上手十分容易。其外電路部分結構簡單,便于控制,因此可用于開關磁阻電機的仿真。
有取向硅鋼得益于它的內部結構中晶粒方向的一致性,因此經常被用在磁路單一的變壓器上。從化學成分講,有取向硅鋼的硅含量比無取向硅鋼的硅含量要高。本文在使用無取向硅鋼的基礎上對LSRM進行了結構優化,應用JMAG仿真軟件,確定推力最大的結構參數;并將有取向硅鋼應用于磁路較為簡單的LSRM上,推力有一定提升;在動子齒部開切向槽,降低了推力波動。
1 電機模型及特性分析
LSRM是由旋轉SRM沿徑向剖開并展平而得,因此繼承了旋轉SRM的特性。本文選用的是12/8極SRM,當其被剖開展平為LSRM時,它的動子極寬與定子極寬的比值依舊為1.5。為了簡化仿真,使用JMAG仿真軟件對電機的最小單元模型進行仿真,即3/2極,該電機的最小單元模型示意圖如圖1所示。

(a) 電機結構圖

(b) 電機剖分圖
圖1(a)為電機結構圖,電機主要包含動子、定子及線圈繞組,定子從左至右依次繞A,B,C三相繞組,電機所用無取向硅鋼牌號為50CS350,定、動子均采用疊壓系數為0.95的0.5 mm硅鋼片。圖1(b)為電機剖分圖,由于電機定子齒、動子齒的磁力線較密集,因此在定子和動子的齒端加密剖分,增加精確度。
1.1 LSRM推力方程
LSRM位移對電感的影響可等效為余弦規律表達式:

(1)
式中:Lsi為電機漏感;Lavg為電機電感平均值;wt為電機齒寬與槽寬之和;x為電機位移量。
電機實際運行情況下電機漏感Lsi較小,可將其視為0,于是式(1)可簡化:

(2)

(3)
式中:Lmax為電機最大電感值;Lmin為電機最小電感值。
當一相通入電流時,磁儲能Wm可表示:

(4)
式中:i為相電流;Wm為電機等效電感中的磁儲能。
當Δx→0時,ΔWm→0。對應的電磁推力:
FΔx=ΔWm
(5)

(6)
當Δx→0時,
1.2 外電路與推力
SRM的運動需要借助外電路的控制,如圖2所示,控制電路選用不對稱半橋驅動電路。L1、L2、L3依次對應電機中的A,B,C三相繞組,通電次序為在一個電機開關周期中(動子運動一個極距的時間),先只打開S3、S4開關,然后只打開S1、S2開關,最后只打開S5、S6開關,即導通次序為B-A-C,三組開關的導通時間一致,即為按B-A-C的順序導通。

圖2 不對稱半橋驅動電路
電機選取恒定電流源作為供電電源,通入20 A的直流電,每相匝數為50匝,控制方式為角度位置控制(APC),電機相電流波形如圖3所示。

圖3 電機相電流波形圖
通入20 A直流電后動子運動兩個極距的推力波形如圖4所示。

圖4 B-A-C三相依次導通時的推力波形圖
動子在開始階段為起動階段,推力較小,當導通線圈變為A相線圈時,推力逐漸趨于平穩,此后一直以單相導通時間為周期進行推力波動。
1.3 初始位置對推力的影響
改變控制電路的開關時間可以影響推力,而直接改變各相導通時間對推力波動的影響較大,因此選擇改變動子的初始位置,相當于間接改變開關時間。開關周期為動子運動一個極距的時間,因此選擇推遲一個開關周期進行仿真,即初始位置從-66 mm到0,仿真結果如圖5所示。

圖5 延后一個開關周期的推力變化圖
從圖5中可以看出,推力隨著初始位置的變化,呈現出一個凹形變化,在-60.5 mm處正向推力最大,在-30.5 mm處反向推力最大。
1.4 三種典型位置的磁密矢量圖
為探究LSRM的磁力線分布,現對三種典型位置的磁力線進行仿真分析。
圖6為B相結束導通時的磁力線矢量圖。當B相結束導通時,動子齒和定子齒還未完全重合,此時僅由B相提供推力,電機還處在起動階段,最大磁密僅有1.35 T。

圖6 B相結束導通的磁力線矢量圖
圖7為A相開始導通的磁力線矢量圖。此時電機已達到額定速度,由A相提供推力,此時A相最大磁密已達到1.86 T,電機處于穩態運行狀態。

圖7 A相開始導通的磁力線矢量圖
圖8為A相切換C相導通的磁力線矢量圖。此時,推力由A相和C相共同提供,A相齒與動子齒完全對齊,C相與動子齒也處于半對齊狀態,此時最大磁密僅為1.41 T,這也導致了換相時的推力波動。

圖8 A相切換C相導通的磁力線矢量圖
2 采用無取向硅鋼的電機結構優化
電機定子、動子結構如圖9所示,主要結構參數均標注于圖9中。

圖9 電機結構示意圖
2.1 電機結構優化
通過定子、動子齒的磁力線對LSRM推力影響較大,定子、動子齒寬的變化對磁路影響較大,進而影響推力的大小,而單個變量仿真精確度不夠,無法尋找到最優點,因此對定子極寬比σs、動子極寬比σr進行雙變量仿真,研究其對平均推力的影響。定子、動子極寬比取0.3~0.7,仿真結果如圖10所示。

圖10 不同定子極寬比、動子極寬比下的平均推力曲線
由圖10可知,當動子極寬比一致時,平均推力隨著定子極寬比的增加而近似線性增加;而當定子極寬比一致時,平均推力隨著動子極寬比的增加而呈一個先增后減的趨勢,并在動子極寬比為0.44左右達到最大。

圖11 不同動子齒部高度、軛部高度下的平均推力曲線
圖11顯示了不同動子齒部高度、軛部高度下的平均推力曲線。由圖11可知:當動子齒部高度Ht一致時,隨著動子軛部高度Hy的增加,平均推力先線性增加,當動子軛部高度達到10 mm以上時,平均推力趨于穩定;當動子軛部高度一致時,隨著動子齒部高度的增加,平均推力緩慢增加。
由于改變齒部高度、軛部高度會對鐵耗有較大影響,因此對不同齒部高度、軛部高度下的動子鐵耗進行研究,如圖12所示。

圖12 不同動子齒、軛部高度下的動子鐵耗曲線
由圖12可知,當動子齒部高度Ht一致時,隨著動子軛部高度Hy的增加,鐵耗呈現一個先增后減的趨勢,并在動子軛部高度9 mm處達到最大,由于軛部高度小于9 mm時,動子軛部始終處于飽和狀態,鐵耗也隨著軛部高度的增加而線性增加,而當軛部高度大于9 mm,軛部逐漸趨于非飽和狀態,因此鐵耗逐步降低。動子軛部高度一致時,隨著動子齒部高度的增加,鐵耗也會逐漸增加,但當軛部高度大于9 mm后,相同齒部高度的鐵耗會逐漸降低。
由于定子槽滿率的要求,不對定子齒部高度進行分析,僅對定子軛部高度進行研究,如圖13所示。
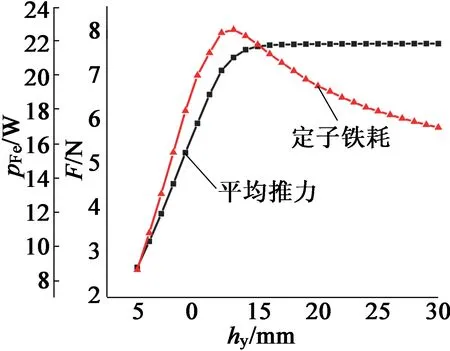
圖13 不同定子軛部高度下的平均推力與鐵耗變化曲線
由圖13可知,隨著定子軛部高度的增加,推力呈線性增加趨勢,直到高度達到16 mm,推力趨于平穩,而定子鐵耗則在13 mm處達到了最大值,此后隨著定子軛部高度的增加而逐漸降低,定子軛部由飽和狀態變為不飽和狀態。
2.2 電機主要尺寸參數
綜合考慮硅鋼片用量、平均推力、鐵耗的要求,確定了電機主要尺寸如表1所示。

表1 電機主要尺寸參數
3 采用有取向硅鋼的電機結構優化
有取向硅鋼在軋制方向上磁導率較高,而在垂直于軋制方向上的磁導率較低,甚至低于普通無取向硅鋼材料,鐵耗特性也較差,因此,有取向硅鋼材料適用于磁路較為簡單的場合,如變壓器等。LSRM磁路簡單,因此可選武鋼牌號為35Q145的有取向硅鋼應用于該電機,電機結構如圖14所示。

圖14 基于有取向硅鋼的電機結構圖
該電機動子和定子軛部均由水平方向軋制的有取向硅鋼制成,而齒部均由豎直方向軋制的有取向硅鋼制成,圖15為50CS350和35Q145兩個牌號硅鋼片的B-H曲線,由于有取向硅鋼沿軋制方向和垂直軋制方向磁導率的不同,因此它們的B-H曲線有差異。

圖15 兩種硅鋼材料的B-H曲線對比圖
3.1 軋制角優化
考慮到LSRM部分磁力線不是沿水平或豎直方向,如圖16所示。

圖16 LSRM磁力線分布圖
磁力線在定子、動子齒部中部沿豎直分布,但在齒部、軛部交界處磁力線有一定角度的彎曲,因此可以對有取向硅鋼片軋制角度進行研究,如圖17所示。

圖17 軋制角示意圖
圖17中,θ1、θ4分別為動子、定子軛部硅鋼片軋制方向同水平方向的夾角,θ2、θ3分別為動子、定子齒部硅鋼片軋制方向同豎直方向的夾角,這些夾角的變化會對電機推力產生影響。
推力隨動子、定子齒軋制角θ2、θ3的變化如圖18所示。由圖18可知,動子齒軋制角θ2在10°、定子齒軋制角θ3在0時平均推力達到最大,可見動、定子齒軋制角對推力的影響較大。

圖18 平均推力隨θ2、θ3的變化
平均推力隨θ1、θ4的變化如圖19所示。由圖19可知,θ1、θ4的變化對平均推力影響很小,在軋制角為0時的平均推力依舊最大,因此動、定子軛的軋制角均選擇0,可見電機動子、定子軛部硅鋼片的軋制角度對推力影響較小,磁力線發生彎曲處主要集中在齒部上。

圖19 平均推力隨θ1、θ4的變化
3.2 優化前后對比
使用兩種不同硅鋼材料的推力對比如圖20所示,平均推力由7.883 N增大到8.306 N,平均推力增長了5.37%。

圖20 使用兩種不同硅鋼的電機推力對比圖
4 推力波動優化
由于LSRM在換相時具有較大的推力波動,該推力波動對于電機的平穩安全運行有較大影響,因此考慮對推力波動進行抑制。考慮對動子齒部進行優化,研究開切向槽對推力波動的影響,動子優化結構如圖21所示,硅鋼材料使用有取向硅鋼35Q145作為研究對象,分別考慮槽的高度h1、深度d1、寬度h2對推力及推力波動的影響。

圖21 動子開切向槽結構圖
為了研究推力及推力波動的變化,特選擇穩態推力作為研究對象,即動子在加速完成后的推力。
穩態推力隨切向槽高度h1的變化如圖22所示。可見,隨著h1的增加,穩態平均推力近似線性增加,而穩態推力波動在h1為1.3 mm時處在一個拐點,此后h1增加對推力波動的增加逐漸放緩。

圖22 h1變化對推力的影響
穩態推力隨切向槽寬度h2的變化如圖23所示。穩態平均推力和推力波動與h2呈反比關系,并在h2為1.7 mm后推力波動降低幅度增加,平均推力呈現先增后減的趨勢,穩態平均推力總減小量為0.06 N,因此可取推力波動最小點,h2為2.5 mm。

圖23 h2變化對推力的影響
穩態推力隨切向槽深度d1的變化如圖24所示。可見,d1的變化對推力和推力波動的影響較大,且為反比關系,當d1為2.5 mm時,穩態推力及推力波動均達到最小。

圖24 d1變化對推力的影響
考慮到降低穩態推力波動的同時,盡量減少對穩態推力的影響,最終選擇h1為0.9 mm,h2為2.5 mm,d1為1.5 mm,優化前后數據如表2所示。

表2 優化前后對比
優化后穩態推力相較于優化前降低了1.43%,但與此同時穩態推力波動降低了11.4%,可見動子齒部沿切向方向開槽具有較好的降低推力波動的效果,且對推力的影響也較小,有較強實用性。
5 結 語
本文設計了一種LSRM,首先推導了該電機的電磁方程,并從導通順序、初始位置及電機結構三方面進行分析,對其進行了推力優化;然后提出將有取向硅鋼應用于該電機的方案,確定了有取向硅鋼的材料35Q145,研究了不同軋制角對推力的變化,推力有一定幅度的提升;最后提出動子齒部開切向槽減小推力波動的方法,仿真結果表明,此方法對推力波動的減小效果較好,對推力的影響也相對較小。
