基于變論域模糊PID控制的BLDCM仿真分析
2020-03-25 05:17:50鄭德聰李志偉
微特電機 2020年3期
張 軒,徐 苗,鄭德聰,李志偉
(1.山西農業大學 工學院,晉中 030801; 2.山西農業大學 信息科學與工程學院,晉中 030801)
0 引 言
無刷直流電機(以下簡稱BLDCM)是隨著新型永磁材料及電子換相器的出現而誕生的一種同步電機[1],它具有響應速度快、扭矩大、無機械摩擦、噪聲低、壽命長、可靠性高的優點,被廣泛地應用于航空航天、交通運輸、工業自動化等領域[2]。針對BLDCM控制系統,通常采用傳統PID控制器[3],而BLDCM具有電機參量時變、負載擾動頻繁、系統本身強非線性強耦合性等特點[4],故PID控制效果較差。
針對BLDCM在調速控制系統方面的研究,諸多學者提出了多種方法,如模糊控制[4]、神經網絡控制[5]、基于遺傳算法的參數優化控制[6]。文獻[4]提出將模糊控制理論應用于機械臂關節用BLDCM控制器,仿真結果表明,相比于普通PID,參數自適應模糊PID控制響應速度快、魯棒性好。文獻[5]提出將神經網絡算法應用于BLDCM的PID控制器轉速環,仿真結果表明,相比于普通PID,神經網絡PID控制器魯棒性較好,缺點在于待尋優參數較多、收斂速度慢、容易陷入局部最優解[7]。文獻[6]提出了一種基于遺傳算法的PID參數優化控制方法,仿真結果表明,相比于普通PID,該方法具有更快的響應速度、更小的穩態誤差,缺點在于收斂速度較慢。
本文研究一種變論域模糊PID轉速控制器,通過MATLAB/Simulink建立BLDCM轉速、電流雙閉環控制系統,并基于S函數編制了變論域模糊控制代碼。仿真結果表明,該控制系統響應速度、超調量、抗干擾能力均優于普通PID控制、模糊PID控制方案,體現了變論域自適應模糊PID控制方案在解決非線性時變系統方面具有較好的應用價值。
1 雙閉環BLDCM調速系統
BLDCM由永磁體轉子、三相繞組定子、電子逆變器等組成,本文采用最常見的三相六狀態BLDCM模型,其功率管驅動采用Y型全橋式兩兩導通方案,使得永磁體轉子始終受到繞組磁場的洛倫茲力作用而連續轉動[8]。電機的氣隙磁感應強度在空間呈梯形分布等理想情況下[8],電磁轉矩方程:

(1)
式中:ea,eb,ec為各相繞組反電動勢;ia,ib,ic為各相電流;ω為電機轉速。
BLDCM的運動方程:
(2)
式中:Te為電磁轉矩;Tl為負載轉矩;B為阻尼系數;J為電機轉動慣量。
雙閉環BLDCM調速系統的工作原理如圖1所示,包括轉速控制器、電流控制器、電壓逆變器、電機、電流反饋單元、PWM換相單元,其中轉速控制器為外環,電流控制器為內環。
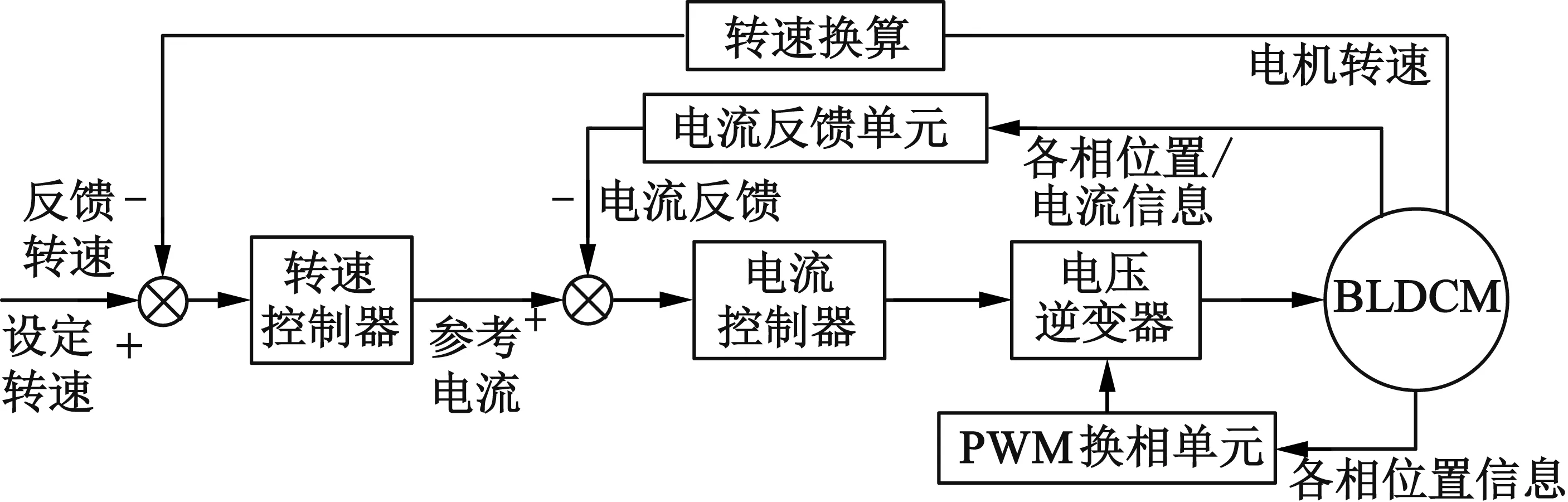
圖1 雙閉環BLDCM調速系統工作原理
2 變論域模糊自適應PID控制算法
2.1 模糊自適應PID控制算法
調速系統以轉速誤差e和轉速誤差變化率ec作為PID調節器的輸入信號,經過模糊控制規則表推理,使用“centroid”解模糊法,動態輸出ΔKp、ΔKi、ΔKd,與原Kp、Ki、Kd分別疊加,實時調整PID控制器各參數,實現轉速控制器在線自適應調整功能,控制原理如圖2所示。
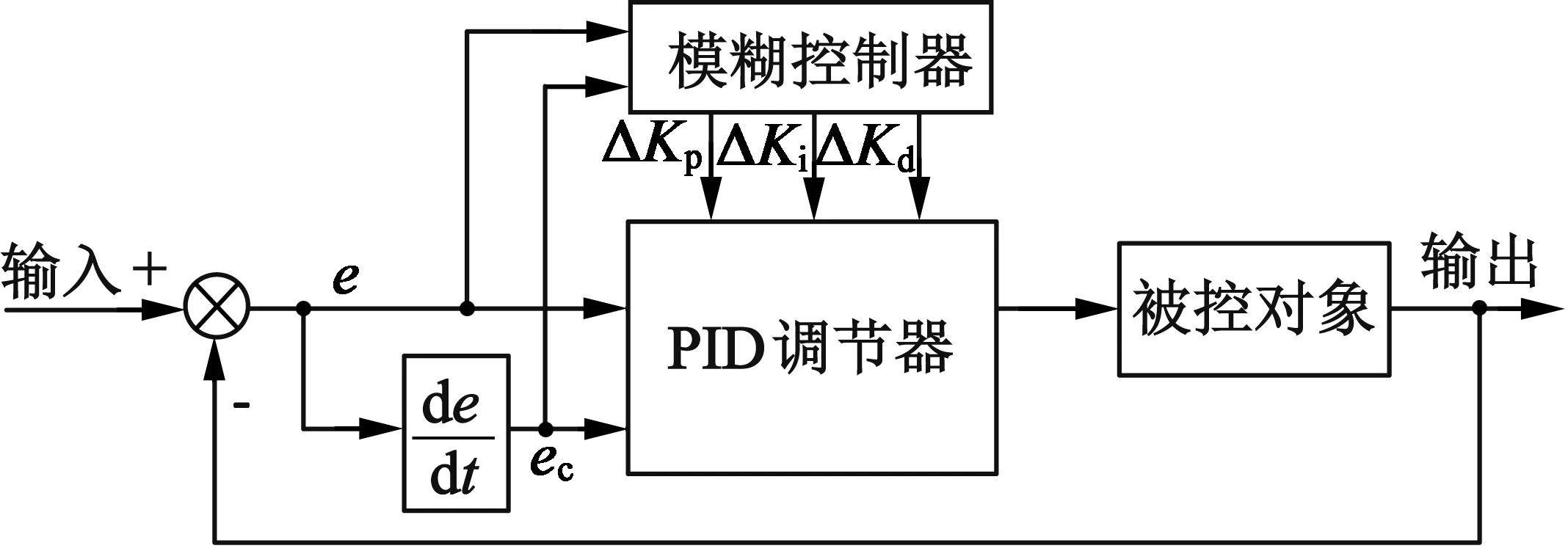
圖2 模糊PID控制器
2.1.1 輸入輸出論域、隸屬度函數
輸入e為[-6,6],輸入ec為[-1,1],輸出ΔKp為[-6,6],ΔKi為[-0.3,0.3],ΔKd為[-0.03,0.03]。對于各個輸入及輸出域模糊集,NB及PB均選取gaussmf型隸屬度函數,其余各語言值均選取trimf型隸屬度函數。如圖3所示。
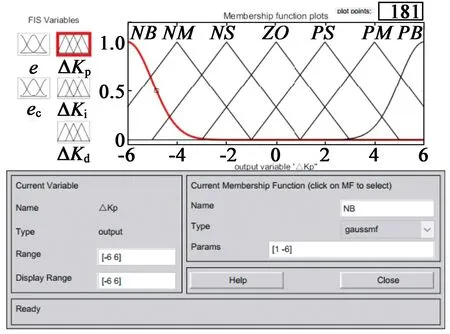
圖3 隸屬度函數
2.1.2 模糊規則、模糊推理
根據實際PID參數調整經驗,采用mamdani法則,以e和ec為輸入建立ΔKp、ΔKi、ΔKd模糊規則表,如表1所示。使用加權平均法(centroid法)對ΔKp、ΔKi、ΔKd進行在線實時修正(解模糊)。
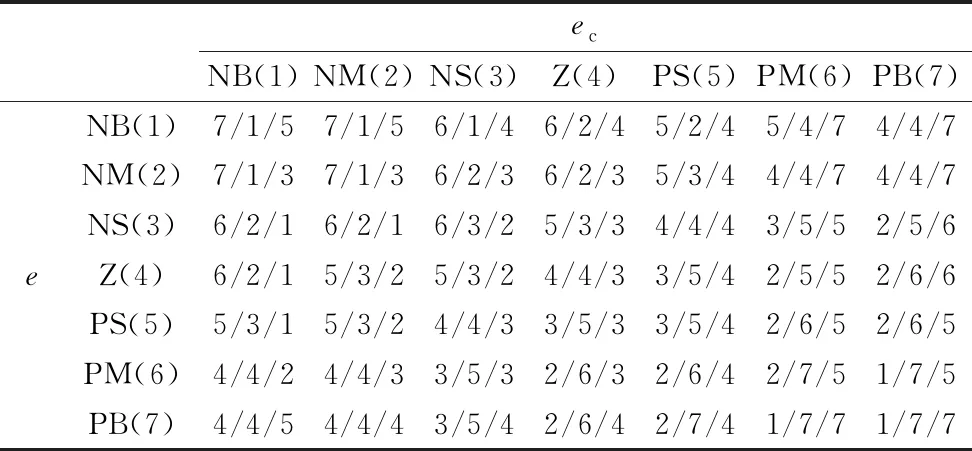
表1 ΔKp/ΔKi/ΔKd參數模糊控制規則
2.2 變論域模糊控制算法
盡管模糊自適應PID控制改進了PID控制的適應性和穩定性,但模糊控制對于BLDCM轉速工作在高精度場合的效果并不理想[9],李洪興通過對模糊系統的插值機理進行分析,提出通過指數型/比例型非線性伸縮因子對輸入輸出進行實時調整,在不增加規則數目、不調整隸屬度函數的情況下,輸入/輸出論域隨著誤差及誤差變化率減小而收縮(增大而擴張)[10],從而利用有限的模糊規則數目提高了靈敏度和穩態精度[11]。定義X(x)/Y(x)為輸入/輸出變量的論域[12]:

(3)
式中:α(x)為輸入變量伸縮因子;β(x)為輸出變量伸縮因子。
輸入、輸出變量的初始論域為[-E,E]、[-F,F]。本文采用基于函數設計的伸縮因子,通過調整比例因子λ、量化因子τ即可實現論域的伸縮,其輸入輸出變量的伸縮因子如下。
比例型伸縮因子:
α(x)=1-λexp(-k1x2) ,λ∈(0,1) ,k1>0
(4)
指數型伸縮因子:

(5)
設輸入變量e、ec的伸縮因子分別為α1、α2,輸出變量ΔKp、ΔKi、ΔKd的伸縮因子為β。對于模糊控制器,e的實際輸入論域為[-Eα1(x),Eα1(x)],ec的實際輸入論域為[-Ecα2(x),Ecα2(x)],ΔKp、ΔKi、ΔKd的實際輸出論域為[-6β(x),6β(x)]、[-0.3β(x),0.3β(x)]、[-0.03β(x),0.03β(x)]。
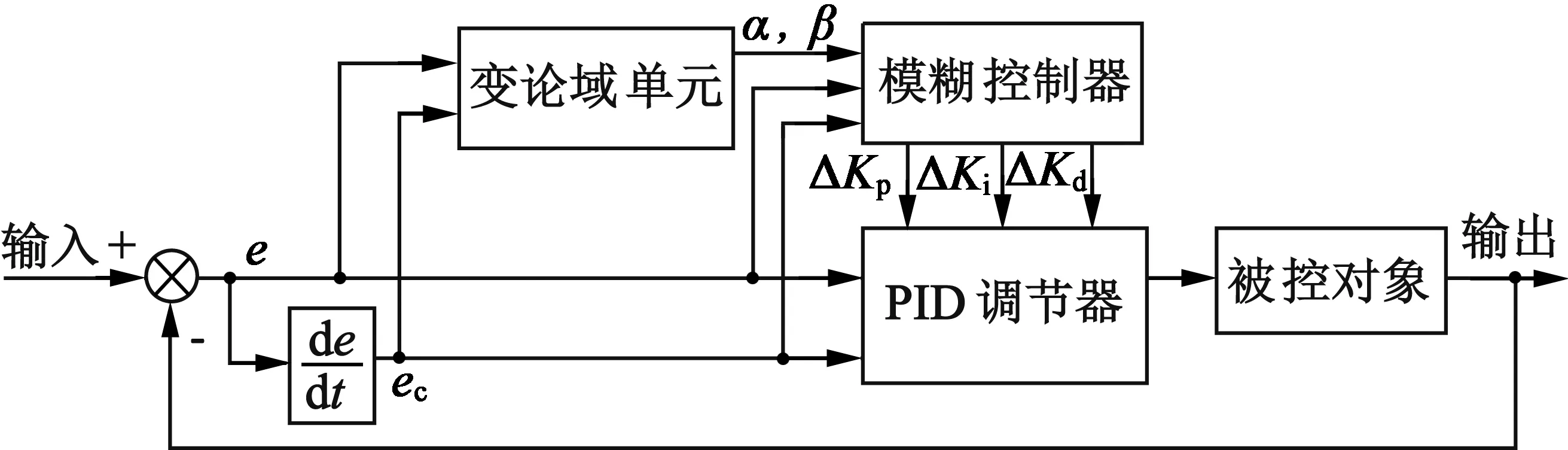
圖4 變論域模糊PID控制器
3 基于S函數的變論域模糊自適應PID控制的BLDCM仿真模型
3.1 BLDCM控制系統Simulink仿真模型
在MATLAB/Simulink中構建了變論域模糊(自適應)PID控制系統的BLDCM仿真模型,如圖5所示。需重點設計的模塊有轉速控制器,內有基于S函數的變論域模糊自適應PID控制器,如圖6所示。PWM換相單元如圖7所示。本文中電流控制器選用常規PID控制方案,作為內環反饋,轉速控制器選用變論域模糊自適應PID控制器方案,作為外環反饋。
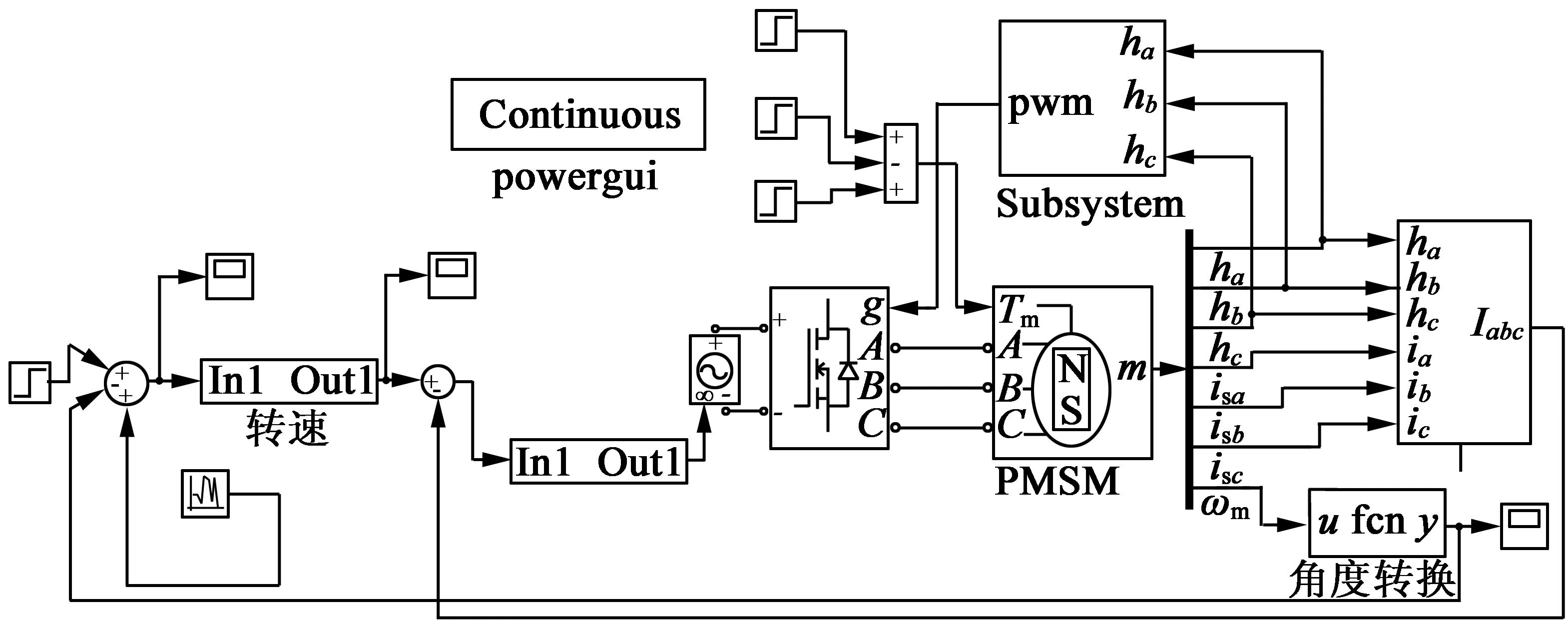
圖5 BLDCM控制系統仿真模型
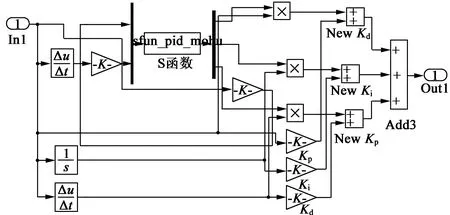
圖6 變論域自適應模糊控制器
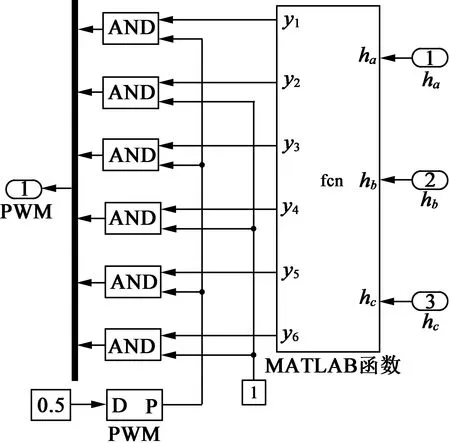
圖7 PWM換相單元
3.2 S函數實現變論域模糊PID控制
變論域模糊PID控制器以誤差e、誤差變化率ec為S函數輸入,ΔKp、ΔKi、ΔKd為S函數輸出,ΔKp、ΔKi、ΔKd分別與Kp、Ki、Kd相加,得到PID調節器輸出。變論域模糊PID控制流程圖如圖8所示。
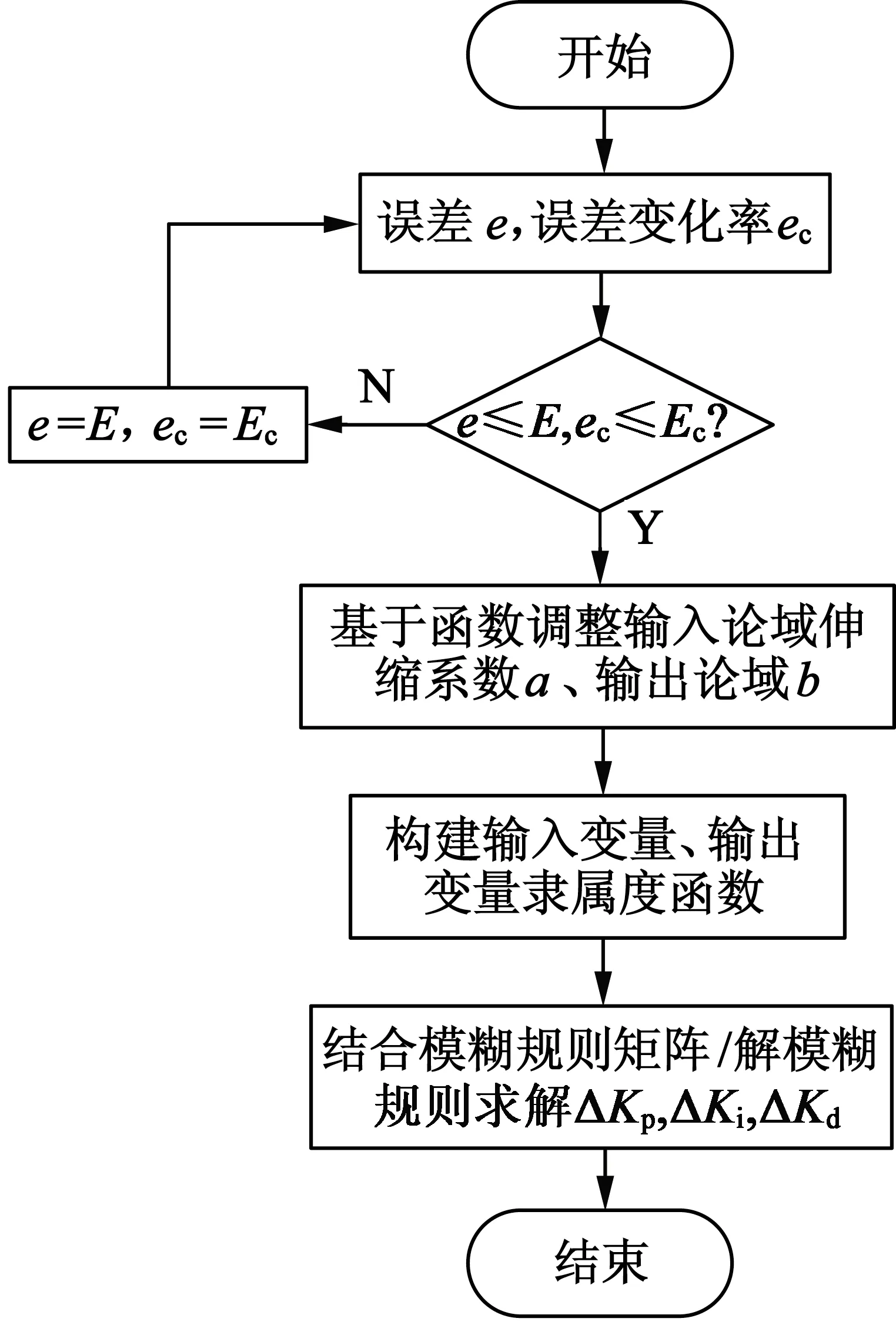
圖8 變論域模糊PID控制流程圖
4 仿真及抗干擾分析
對BLDCM模型進行參數設定:Rs=0.5Ω,Ls=0.01H,轉子磁鏈ψf=0.119 4Wb,轉動慣量J=0.002 7kg·m2,摩擦系數B=0,極對數p=1,初始轉速ωi=0,初始轉子角度θ=0。在MATLAB/Simulink中對BLDCM控制系統仿真,采樣時間為1×10-4s,仿真時間為0.4s。
4.1 轉速突變
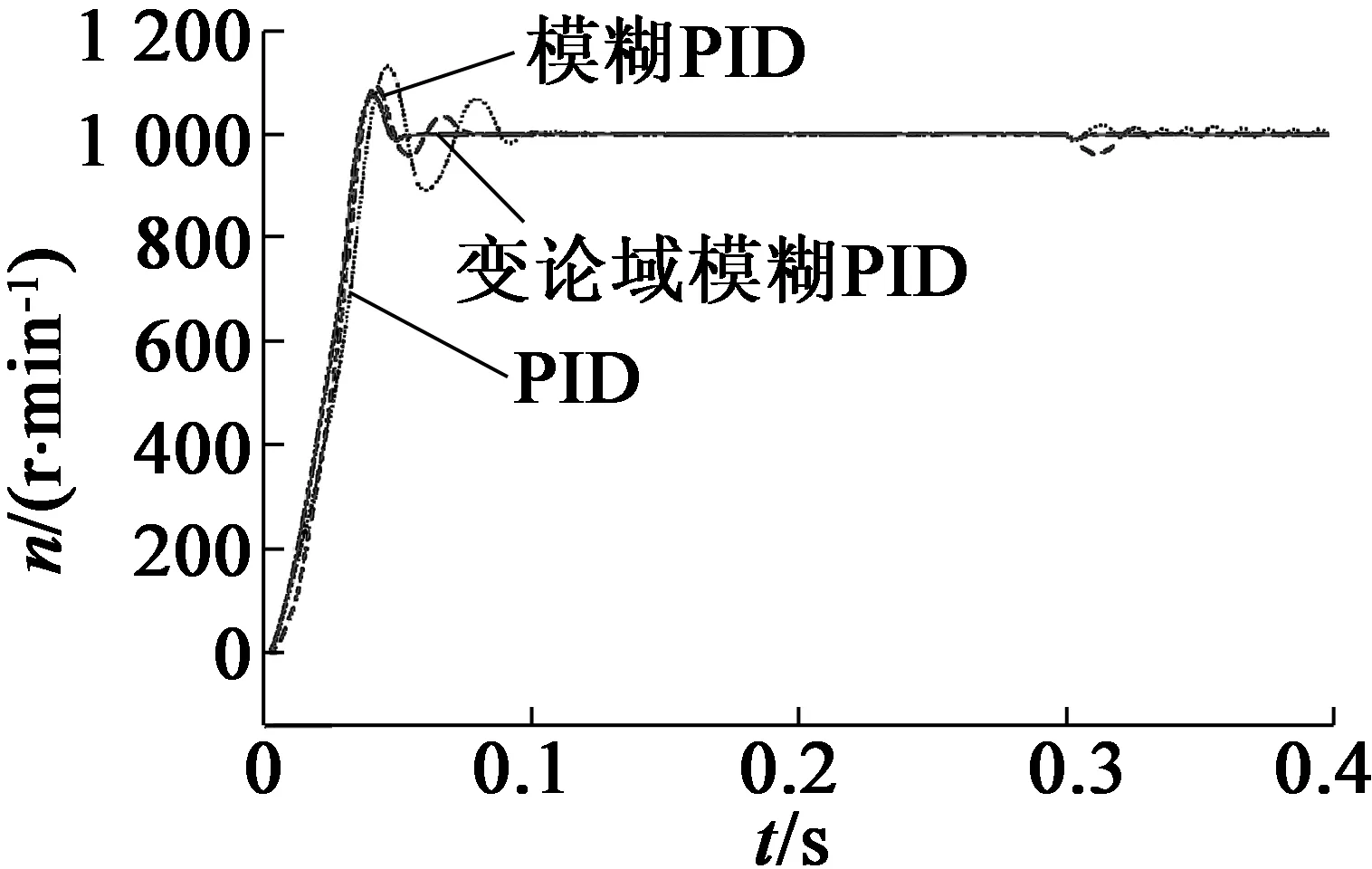
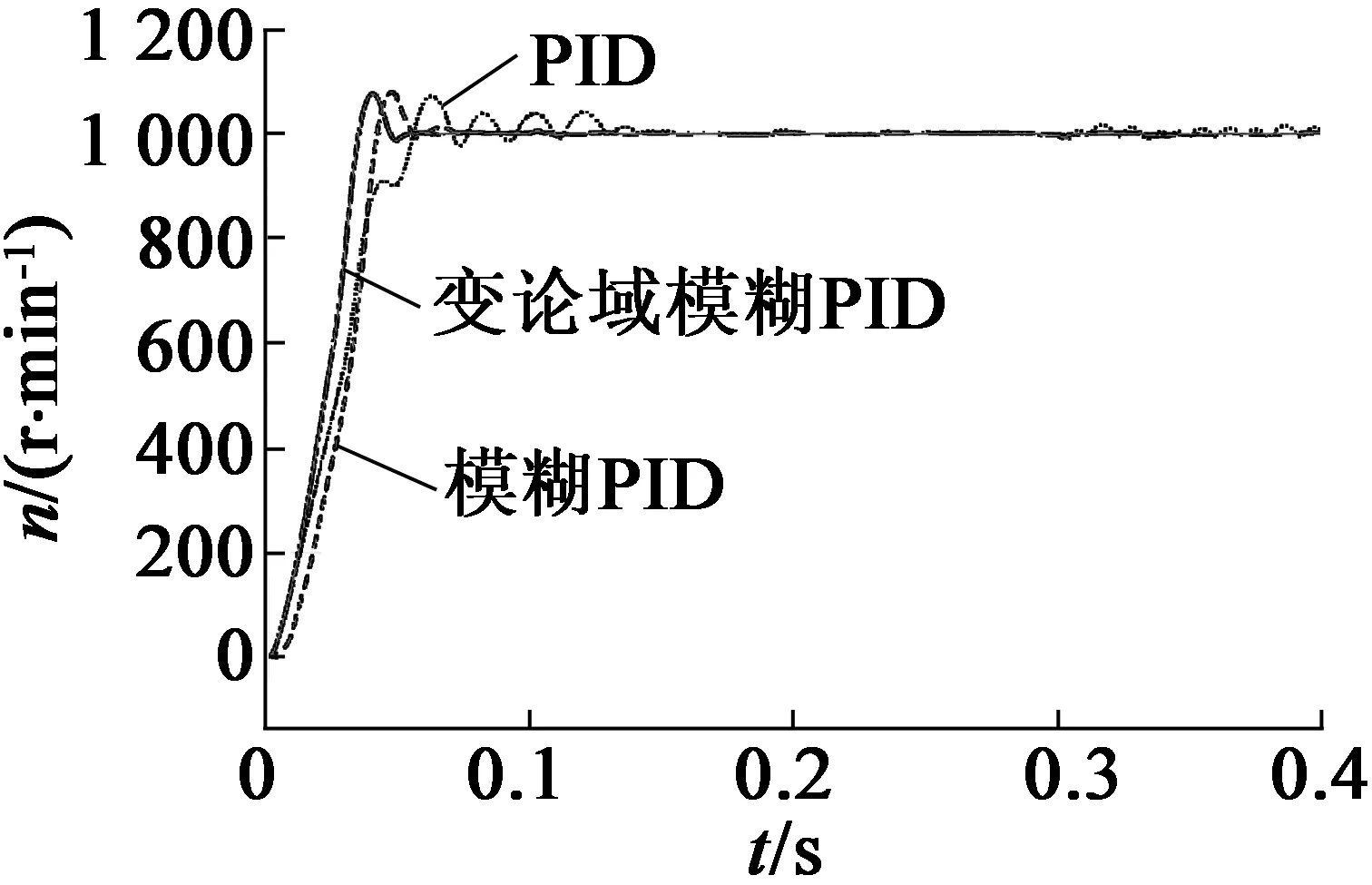
設置初始轉速1 000r/min,初始負載0.3N,于0.2s處輸入轉速突變為2 000r/min。輸入端全程加入0均值3方差值的高斯白噪聲,其余設置與上述一致。轉速突變下的仿真結果如表2、表3所示,轉速對比如圖9所示。
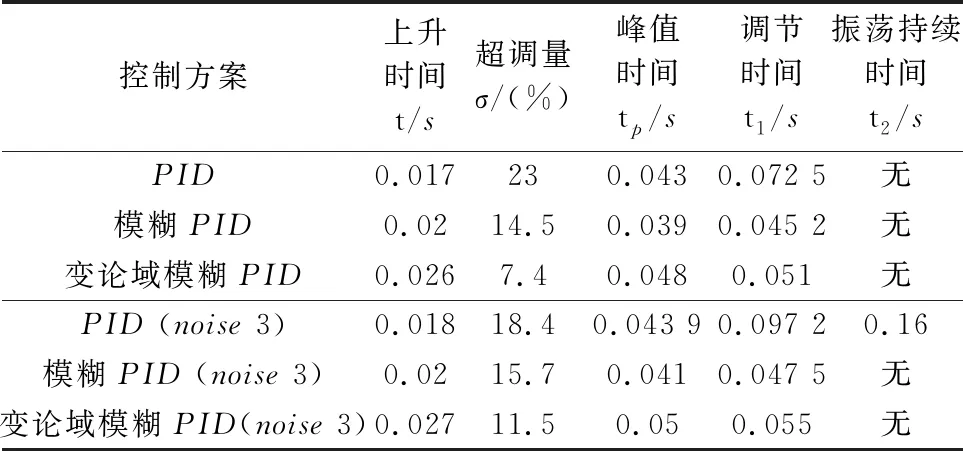
表2 轉速突變(0~1 000 r/min)主要參數對比
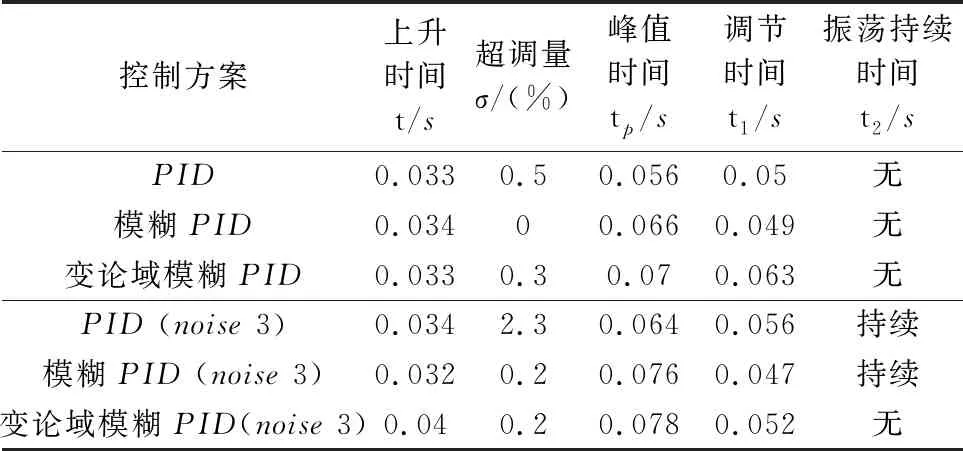
表3 轉速突變(1 000~2 000 r/min)主要參數對比
由圖9可知,BLDCM從0到1 000r/min調節過程中(加外干擾),變論域模糊PID超調量較PID減小了68%、較模糊PID減小了49%,調節時間較PID減少了43%,較模糊PID增加了15%,無振蕩現象出現;在1 000r/min到2 000r/min調節過程中(加外干擾),變論域模糊PID相比PID超調量減小91%,與模糊PID相比超調量改善效果相同,調節時間較PID減少了7%,較模糊PID增加了10%,但相比模糊PID消除了振蕩現象。
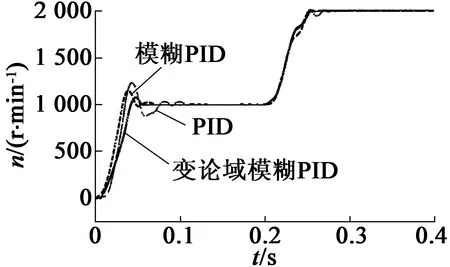
(a) 無外干擾
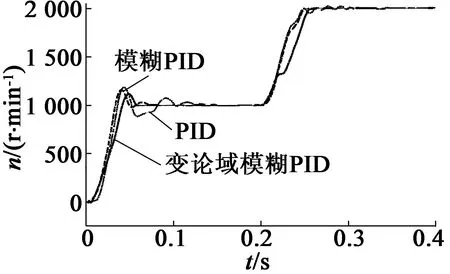
(b) 加外干擾
4.2 負載突變
設置初始轉速1 000r/min,初始負載1N,于0.1s處負載減為0.3N、0.3s處加至2N。輸入端全程加入0均值3方差值的高斯白噪聲,其余設置與上述一致。負載突變下的仿真結果如表4、表5所示,轉速對比如圖10所示。
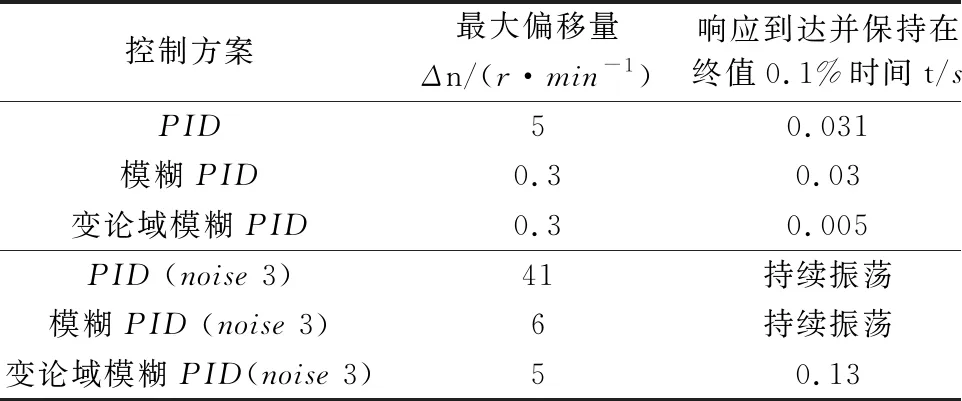
表4 負載突變(1~0.3 N)主要參數對比
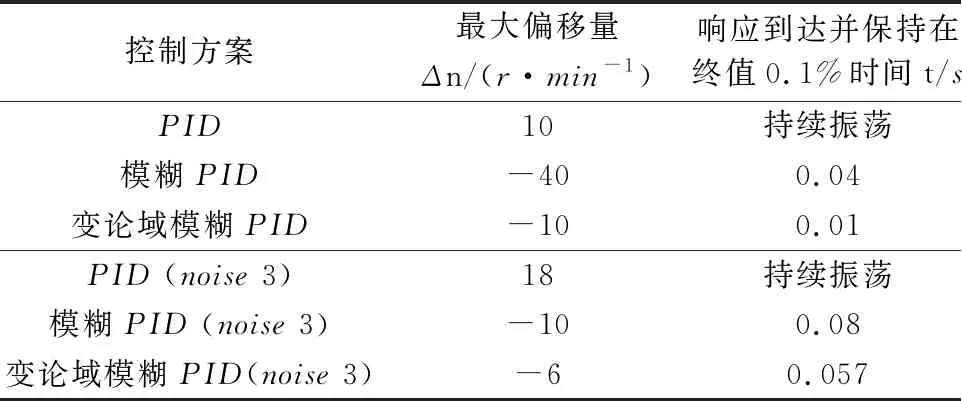
表5 負載突變(0.3~2 N)主要參數對比
由圖10可知,在BLDCM運行平穩后,在存在外干擾作用及0.1s發生負載突減的情況下,變論域模糊PID較PID轉速最大偏移量降低了88%、較模糊PID降低了16.7%,且實現了響應到達并保持
(a) 無外干擾
(b) 加外干擾
在終值0.1%的效果。在存在外干擾作用及0.3s發生負載突增的情況下,變論域模糊PID較PID轉速最大偏移量降低了67%、較模糊PID降低了40%,響應到達并保持在終值0.1%的時間較模糊PID減少了29%。
綜上,變論域自適應模糊PID控制相比于PID控制及模糊PID控制擁有更小的超調量,較快的響應速度,更強的抗干擾能力。
5 結 語
本文設計了一種基于變論域模糊PID控制的無刷直流電機控制系統,通過Simulink建立BLDCM仿真模型,并將基于S函數的變論域模糊PID控制器應用于BLDCM轉速環。通過仿真分析三種控制方案下的轉速調整性能,表明該變論域模糊PID控制方案在超調量、抗干擾、響應速度方面優于普通PID控制、模糊PID控制方案,為BLDCM轉速精準控制提供了較好的方法。
