基于MRAS的異步電機無速度傳感器應用研究
2020-03-25 05:17:38包廣清祁武剛
微特電機 2020年3期
關鍵詞:模型
包廣清,祁武剛
(蘭州理工大學 電氣工程與信息工程學院,蘭州 730050)
0 引 言
在自動化裝配領域中,工業機械臂是最常見的形式。異步電機無速度傳感器矢量控制技術由于成本低、可靠性高的特點,被廣泛應用于機器人的關節驅動控制系統中。目前,已經有多種方法實現了對異步電機的速度辨識,如擴展Kalman[1-2]、線性矩陣不等法[3]、滑模觀測器[4]、全階觀測器[5]和模型參考自適應法[6]等。
模型參考自適應(以下簡稱MRAS)由于算法簡單、穩態精度較高已被廣泛應用于電機的控制,但仍存在一定的缺陷。
基于轉子磁鏈模型的MRAS觀測器,在低速時檢測精度差,且存在積分誤差和誤差積累的問題[7];文獻[8]將無功功率與MRAS相結合,收斂速度較快,魯棒性也有所提高,但未考慮電機參數變化時的轉速辨識問題;文獻[9]利用反電動勢的MRAS轉速觀測器,成功地避開了純積分的問題,但是此方法在低速時估計值誤差值較大;文獻[10]將滑模控制策略作為MRAS結構中的自適應機制,但電壓參考模型中依然存在純積分的問題;文獻[11]采用一種可以同時進行轉速和定子電阻辨識的雙參數的MRAS模型,此方法對電機的定子電阻辨識度較高,卻增加了系統的復雜性;文獻[13]提出以模糊邏輯作為MRAS結構中的PI自適應率,此方法改善了傳統PI參數不能在線更新的問題,卻忽略了電壓參考模型中的積分問題。
本文在基于轉子磁鏈模型的MRAS速度觀測器的基礎上,采用一階慣性環節代替電壓模型中的純積分環節,以消除積分直流偏置的問題,同時設計了一種自適應線性(以下簡稱ADALINE)神經元PID控制器,ADALINE可以根據電機磁鏈、轉速的變化情況對自身的參數進行在線權值修正,該控制器改善了傳統的PI控制器不能根據電機的實際情況進行在線參數修正的問題,提高了速度觀測的精度。仿真結果驗證了該算法的可行性。
1 異步電機數學模型
三相異步電機在兩相靜止坐標系α,β下的電壓方程:
(1)
式中:usα,usβ為定子繞組電壓在α,β軸分量;urα,urβ為轉子繞組電壓在α,β軸分量;isα,isβ為定子繞組電流在α,β軸分量;irα,irβ為轉子繞組電流在α,β軸分量;ψsα,ψsβ為定子繞組磁鏈在α,β軸分量;ψrα,ψrβ為轉子繞組磁鏈在α,β軸分量;Rs,Rr為定、轉子單相繞組電阻;ω為轉子角速度。
磁鏈方程:
(2)
式中:Ls,Lr為α,β坐標系上定、轉子繞組自感;Lm為α,β坐標系上同軸定、轉子繞組間的互感。
轉矩方程:
Te=pLm(isβirβ-isαirβ)
(3)
式中:Te為電磁轉矩;p為異步電動機的極對數。
運動方程:
(4)
式中:J為機組的轉動慣量;TL為包括摩擦阻轉矩的負載轉矩。
2 無速度傳感器的速度觀測模型
2.1 MRAS速度觀測器的原理
轉子磁鏈觀測器有兩種不同的模型:電壓模型和電流模型。
電壓模型:
(5)
電流模型:
(6)
由式(5)和式(6)可知,ω是待辨識的參數。如圖1所示的速度辨識系統中,可調模型和參考模型分別為轉子磁鏈的電流模型和電壓模型。
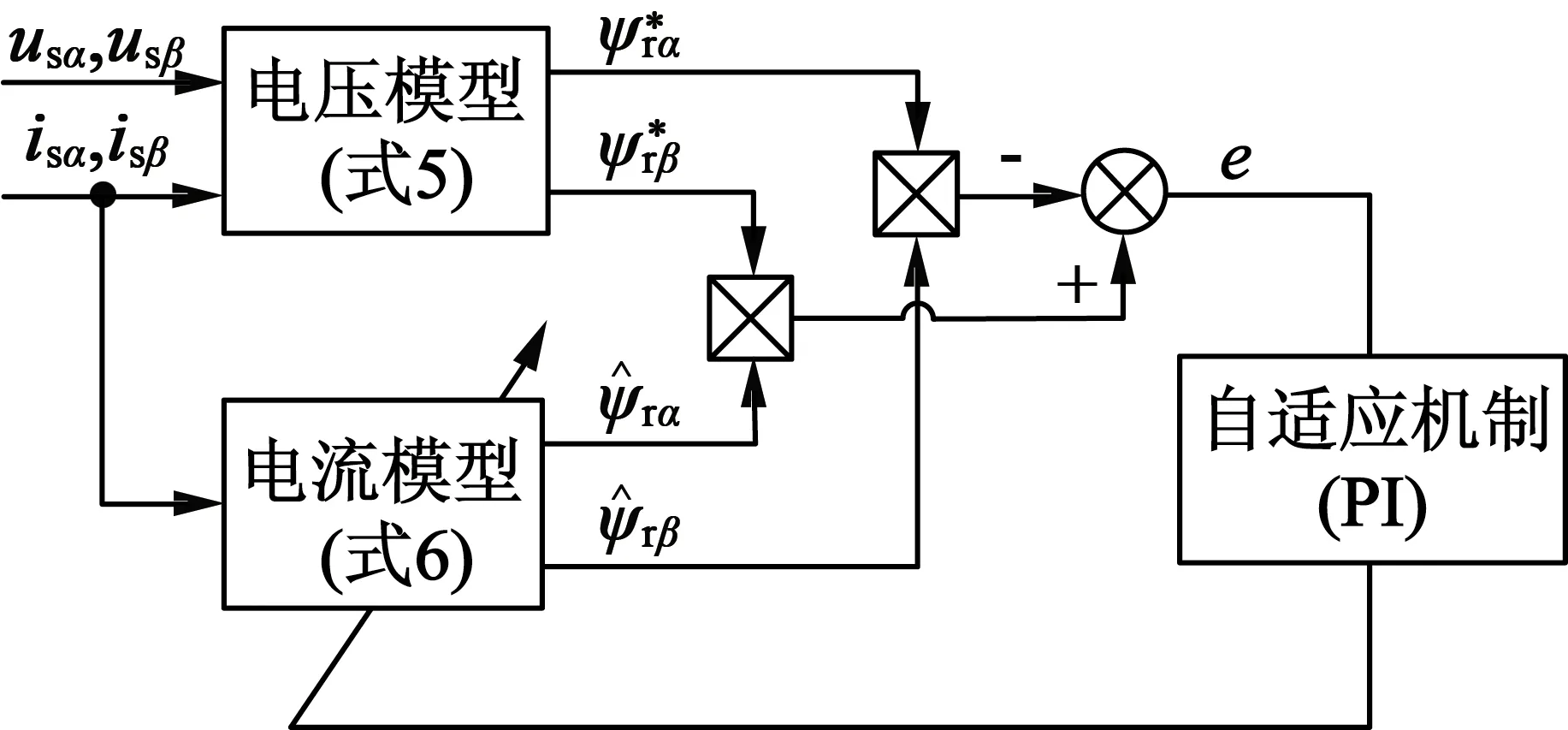
圖1 MRAS速度辨識框圖
根據Popov超穩性定律,該MRAS系統是漸進穩定的。在圖1中取廣義誤差e作為MRAS自適應律的輸入值,定義廣義誤差e:
(7)
以PI為MRAS自適應率,計算電動機轉速ωr:
(8)
式中:KP為比例系數;KI為積分系數。
2.2 改進的MRAS轉速估算方法
轉子的反電動勢:
(9)
轉子磁鏈估計的動態方程:

(10)
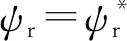
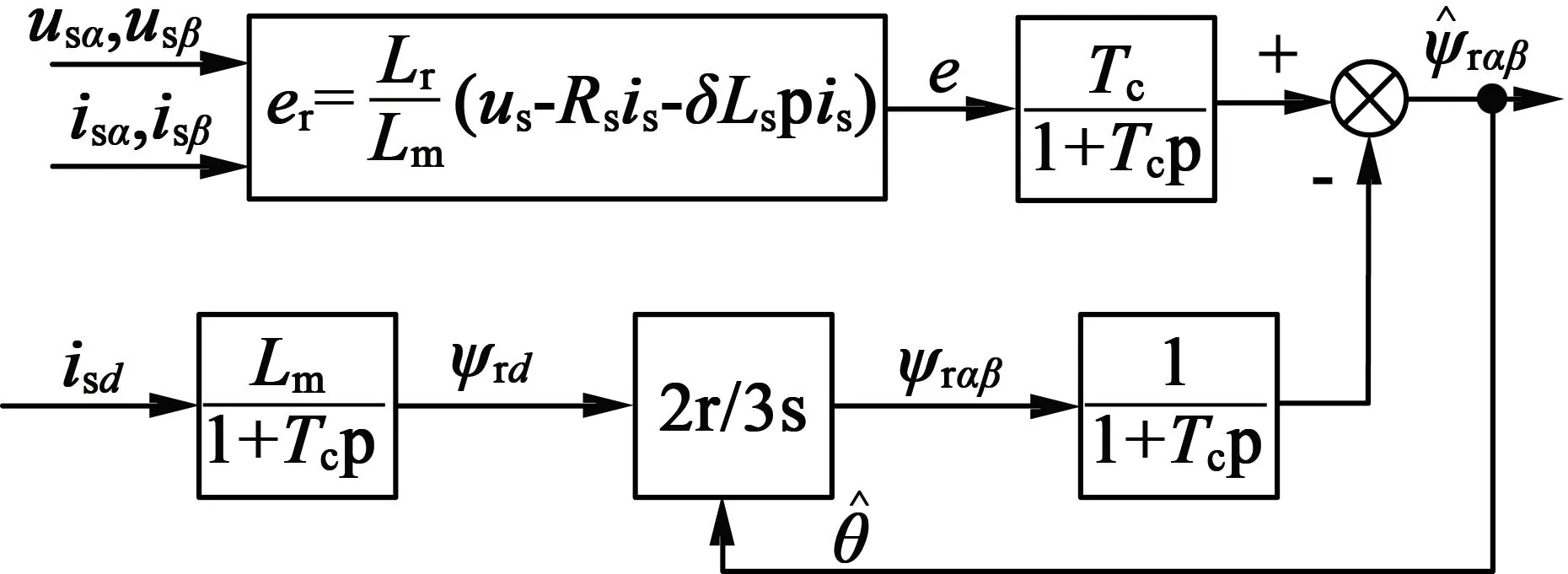
圖2 改進后的電壓模型原理圖
2.3 基于ADALINE的并聯雙模型速度辨識
傳統的基于轉子磁鏈的MRAS轉速辨識方法中,PI調節器不能根據電機磁鏈、轉速的變化進行在線修正,因此其誤差較大。本文將ADALINE作為MRAS的自適應機構,其權重參數在線修正,所以使得速度觀測更加準確。
由式(7),采用PI調節器對磁鏈的廣義誤差進行處理,但PI參數的選取受制于異步電機的數學模型,事先選取適合的PI參數存在一定的困難。而ADALINE可根據外界的輸入和期望響應,其權值進行動態的調整,因此采用ADALINE代替傳統MRAS中的PI自適應率。ADALINE模型如圖3所示。
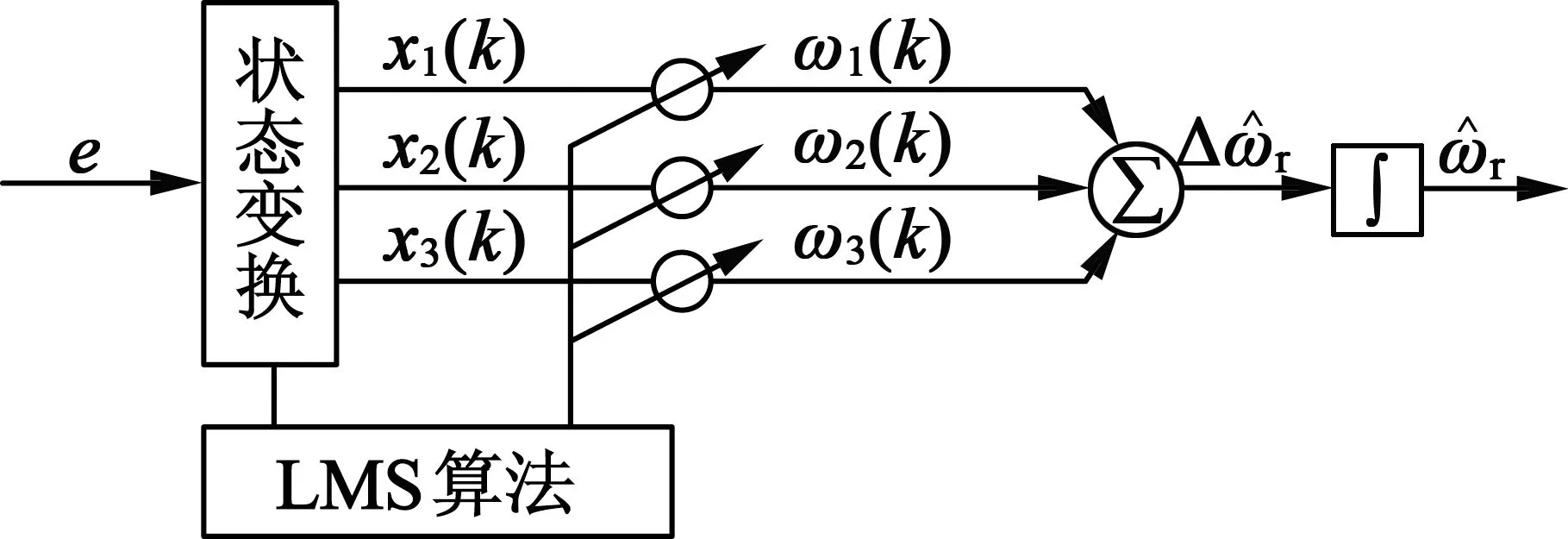
圖3 ADALINE結構模型
圖3中:x1(k),x2(k)和x3(k)為輸入信號;ω1(k),ω2(k),ω3(k)輸入信號的權重。根據轉子的廣義誤差e,定義狀態變量:
(11)
(12)
為了保證系統的收斂性,采用最小均方誤差算法(以下簡稱LMS)來修正ADALINE的加權系數。定義目標函數:
(13)
LMS算法是一種特殊的梯度估計算法,其權重系數采用反梯度向量進行反復迭代更新。根據梯度法,其權值系數的修正公式如下:
(14)
將式(12)和式(13)代入求偏導,可得:
(15)

(16)
結合式(11)、式(14)、式(15)、式(16),得到速度觀測器中權值自學習的差分表達式:
(17)
根據每次轉子磁鏈估計誤差計算此時的狀態變量,由式(17)進行權值更新,由式(11)得到電機的轉速估計。
3 仿真與結果分析
改進后的MRAS速度觀測器的控制系統如圖4所示,并在MATLAB/Simulink環境下對此控制模型進行仿真分析。
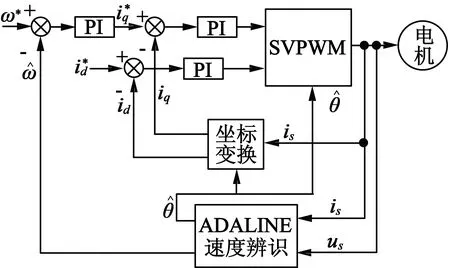
圖4 基于改進的MRAS速度觀測器控制框圖
電機的仿真參數如表1所示。
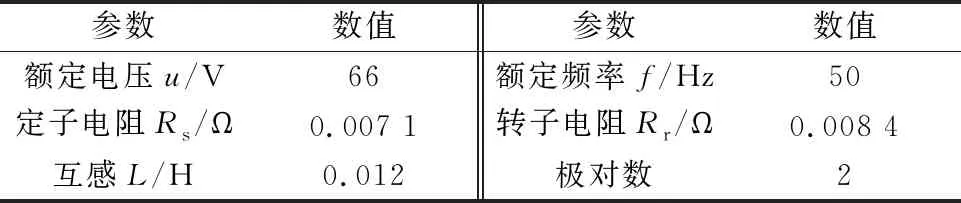
表1 電機的參數
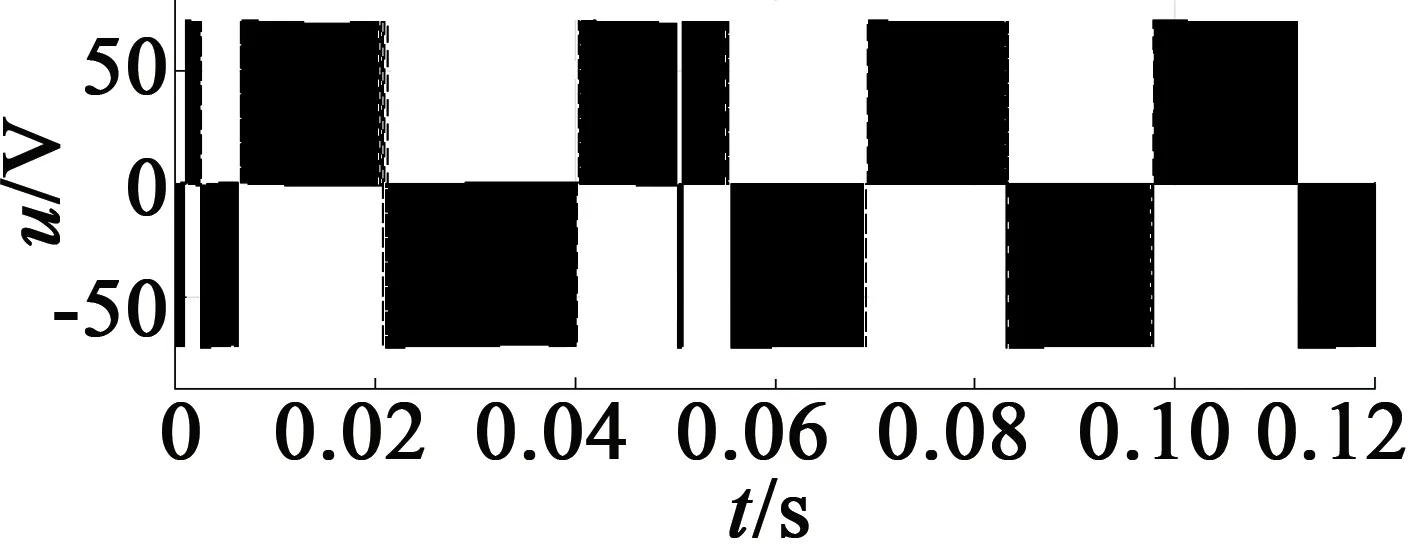
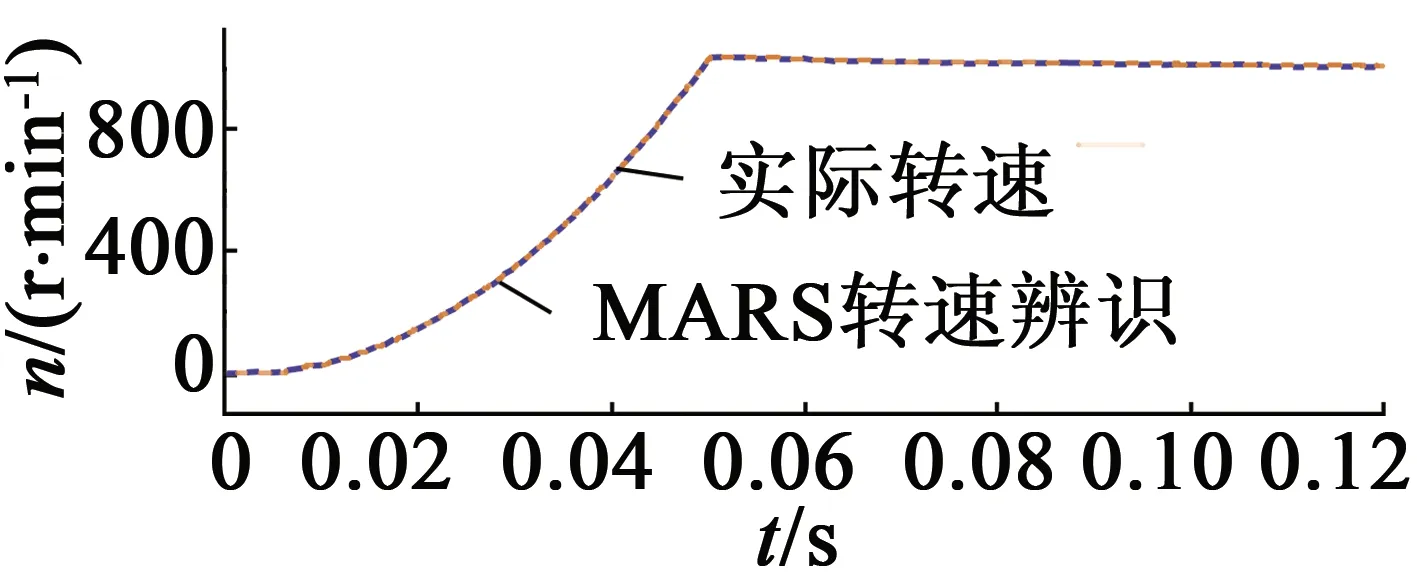
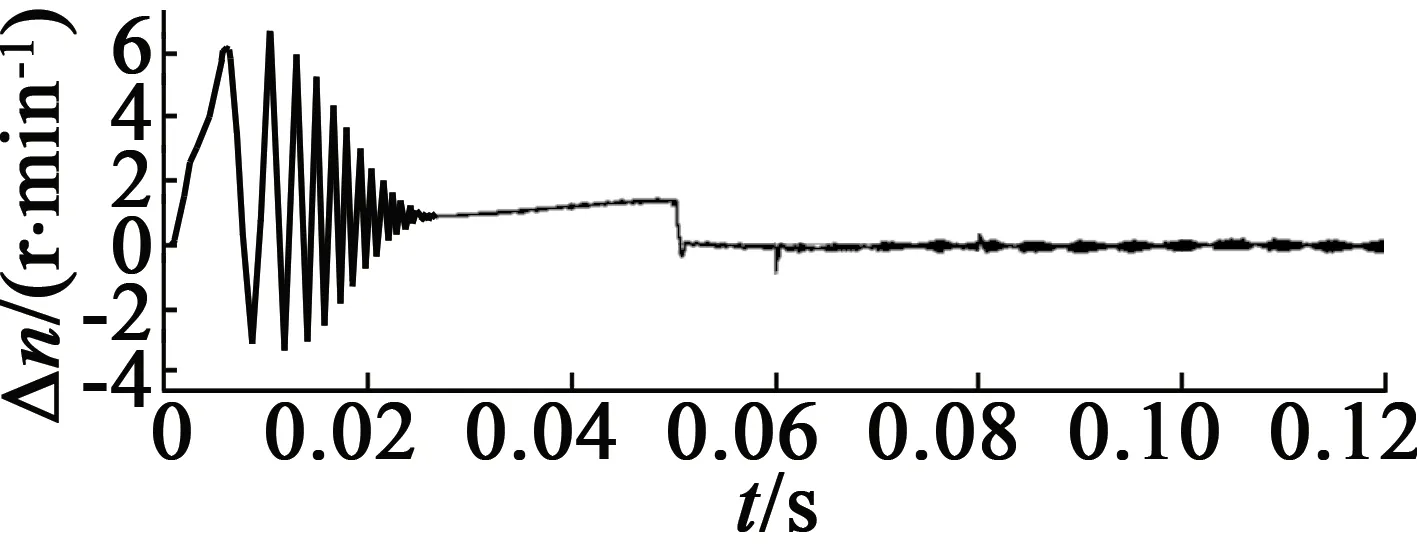
電機給定轉速為1 000 r/min,空載起動,0.08 s時轉速上升至2 200 r/min,仿真結果如圖5所示。圖5(a)為電機定子間的線電壓;圖5(b)為轉速辨識與電機實測轉速的仿真圖,從圖5(b)中可知,辨識轉速的波動較小,較好地跟隨電機的實際轉速;圖5(c)為轉速的誤差圖,由圖5(c)可知,電機的在穩態時誤差很小,響應速度快;圖5(d)為電機的輸出轉矩;圖5(e)為定子電流;圖5(f)為轉子磁鏈運行軌跡圖。
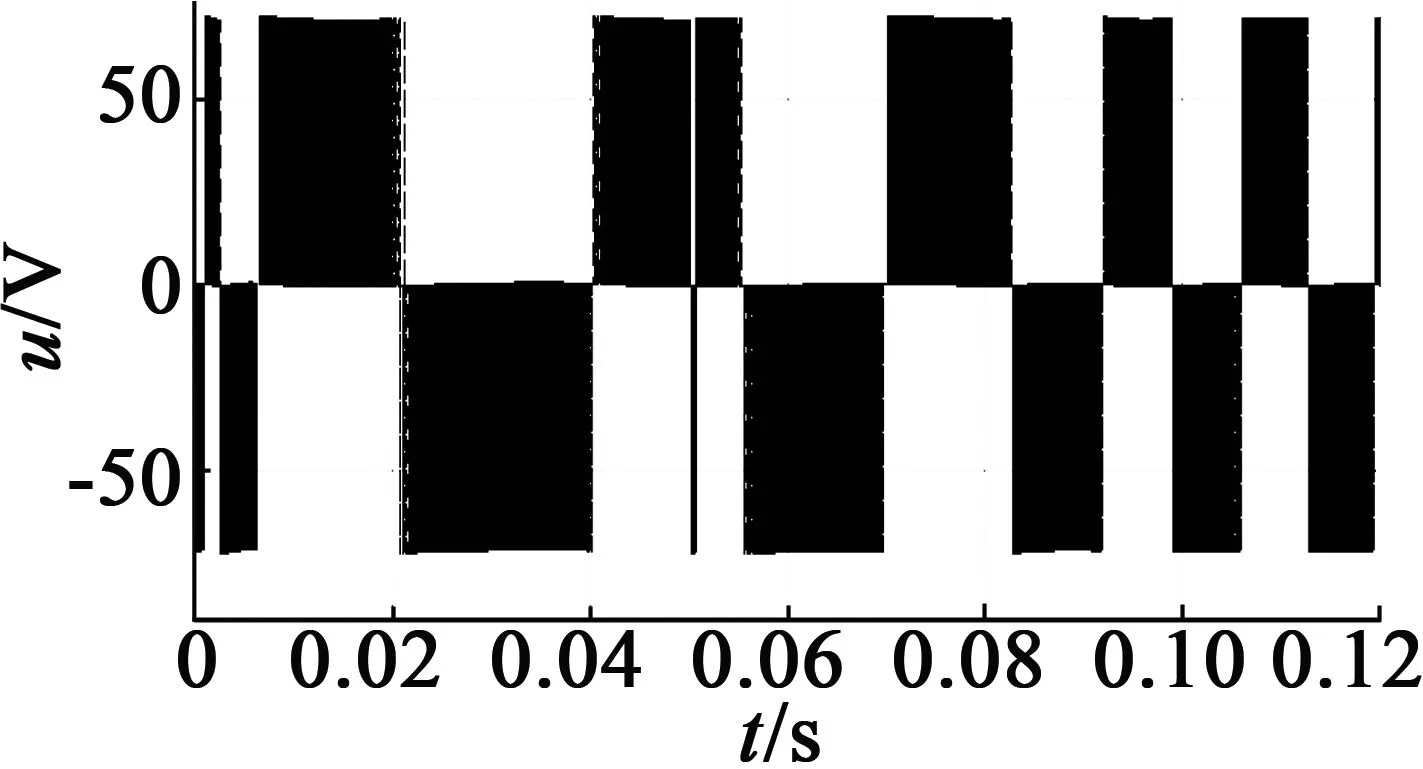
(a) 定子線電壓
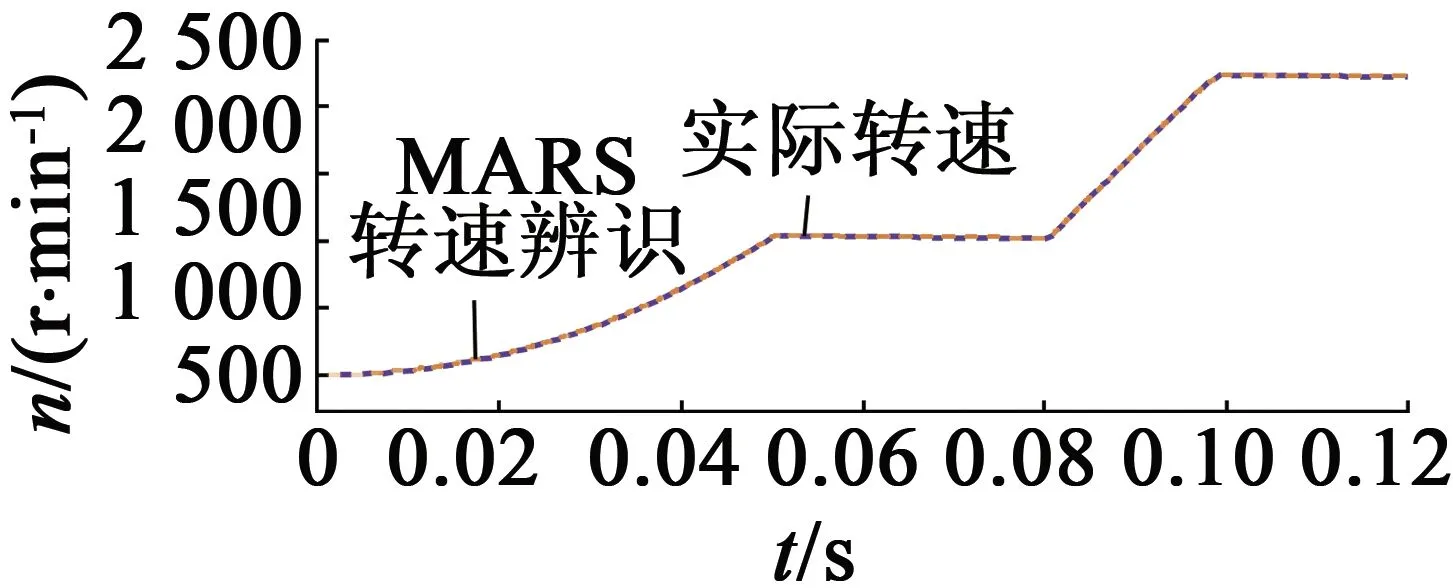
(b) 轉速響應
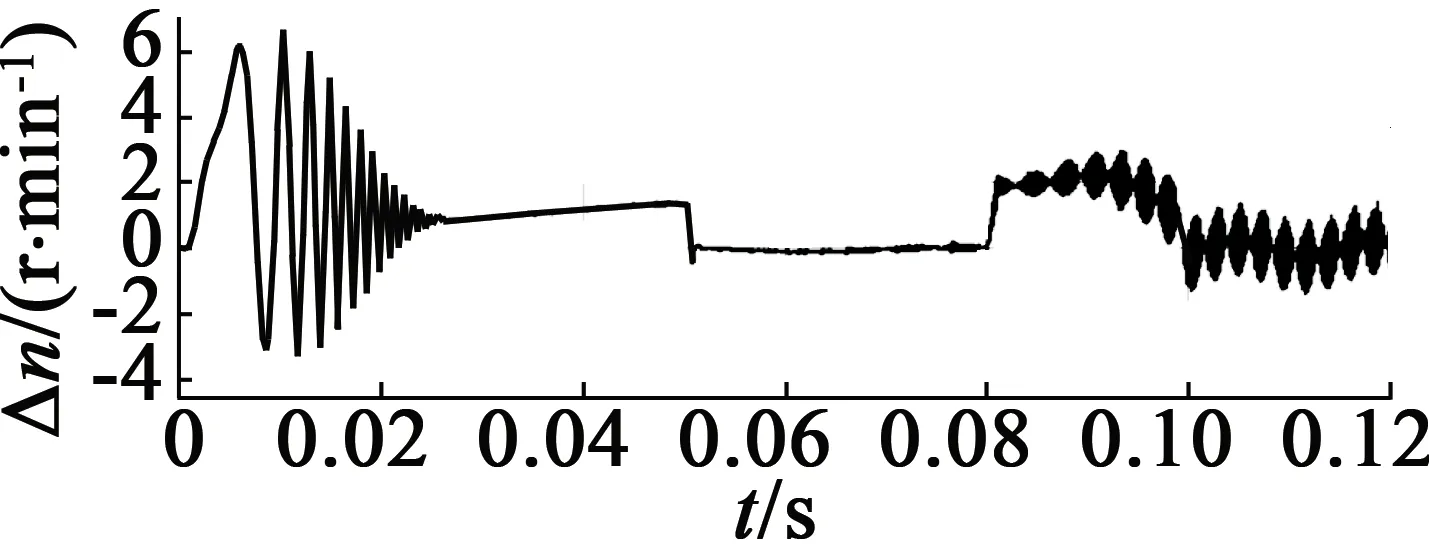
(c) 轉速誤差
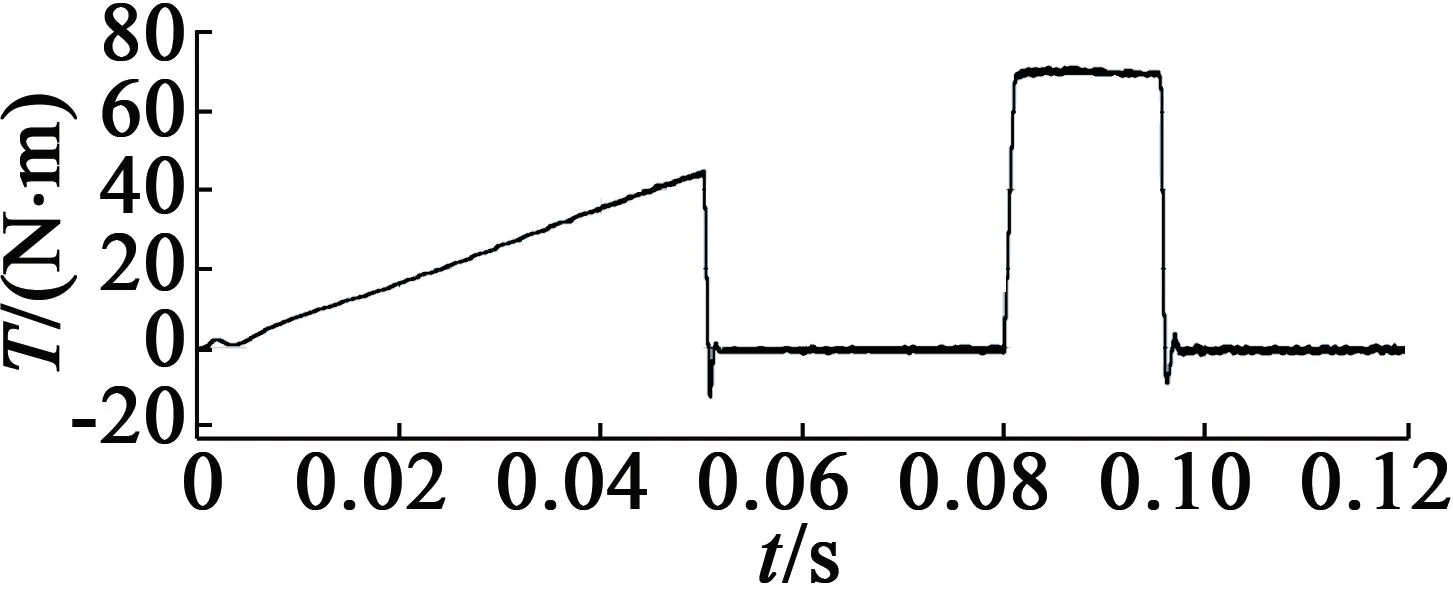
(d) 電磁轉矩
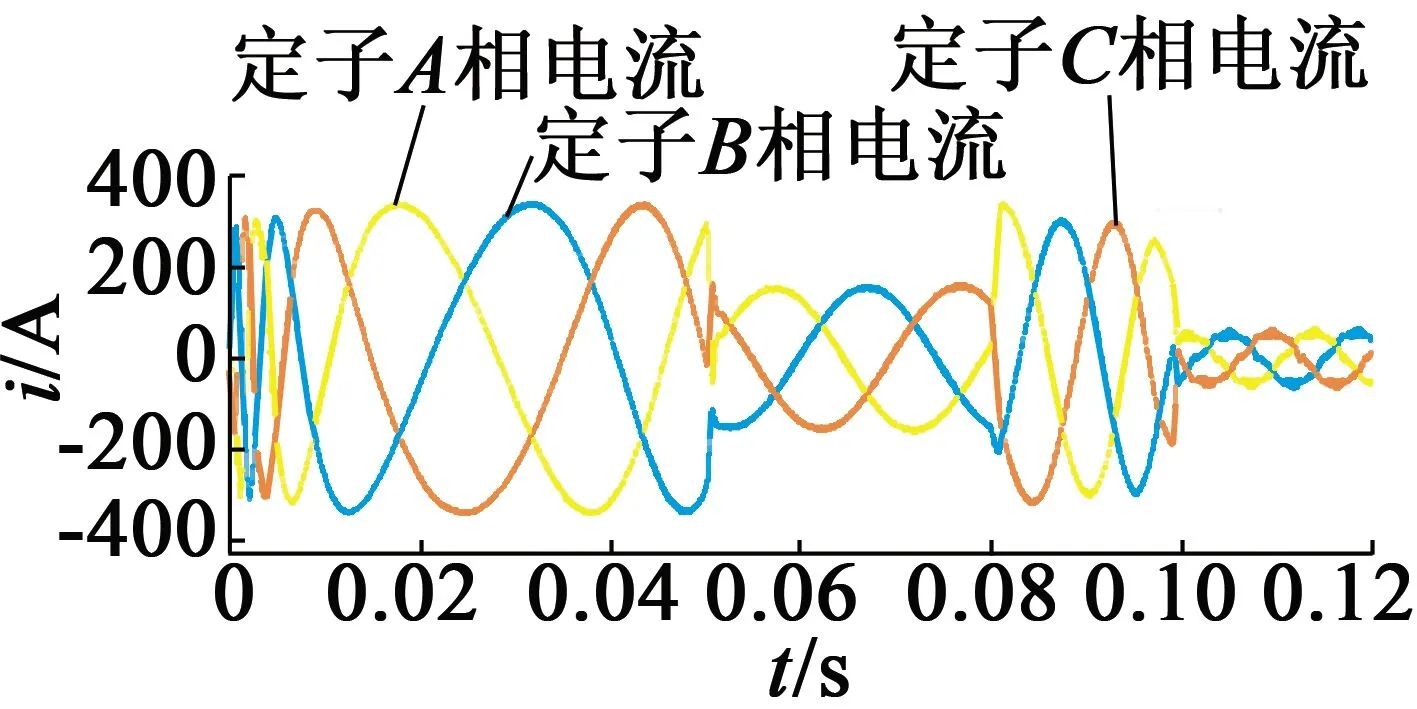
(e) 定子電流
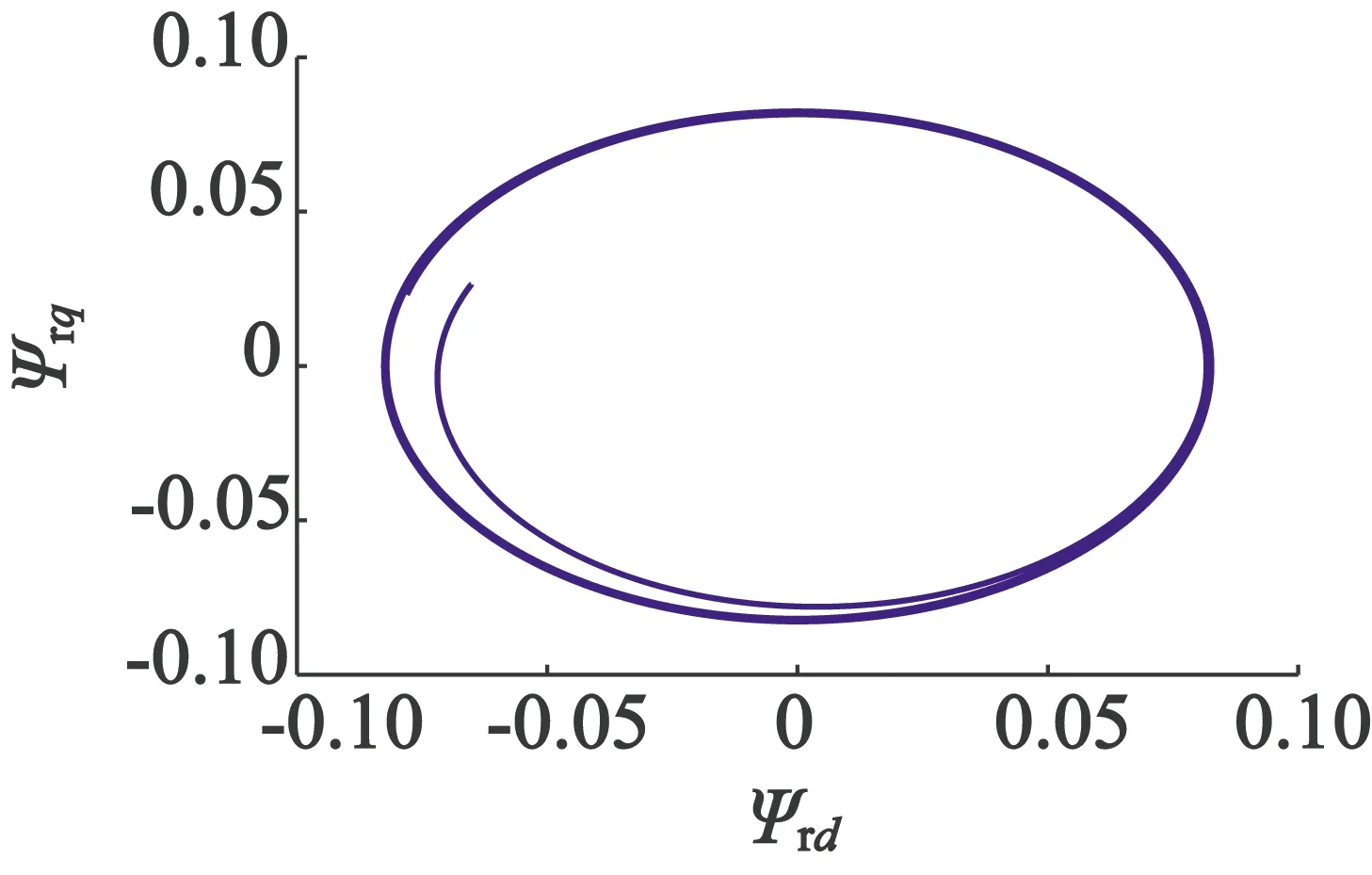
(f) 轉子磁鏈
圖6給定電機轉速為1 000 r/min,在0.06 s突加負載20 N·m,0.08 s時負載減至10 N·m的仿真結果。從圖6中可知,突加負載后轉速略有下降,但立即恢復。
(a) 定子線電壓
(b) 轉速響應
(c) 轉速誤差
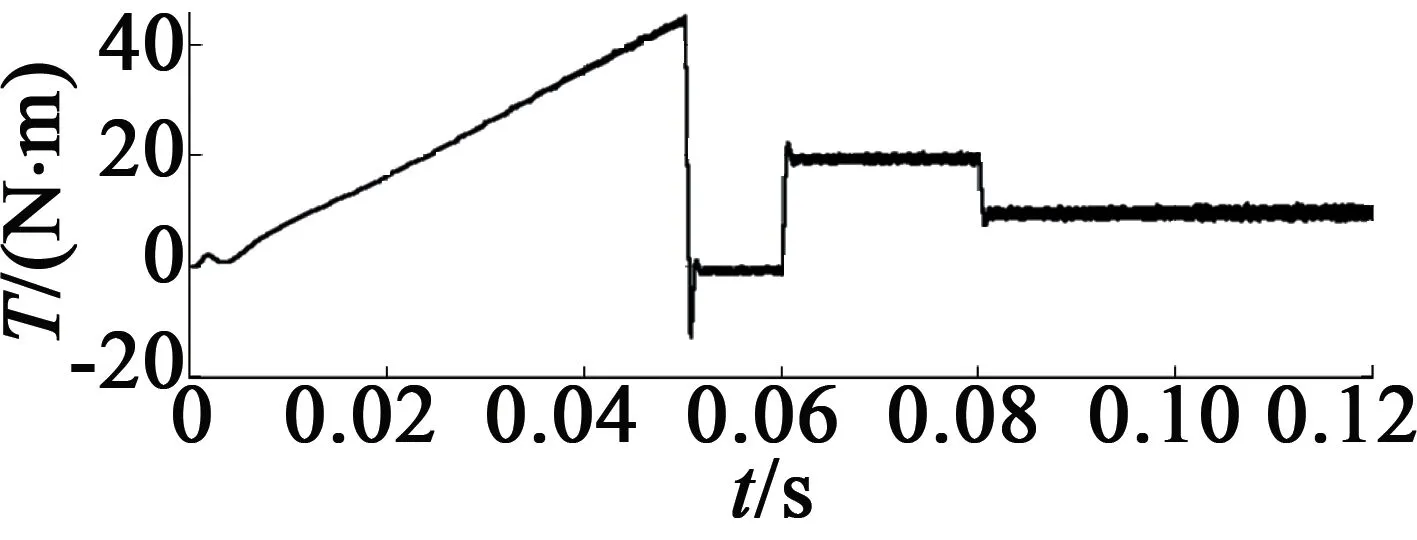
(d) 電磁轉矩

(e) 定子電流
4 結 語
本文以轉子磁鏈的電壓模型和電流模型作為MRAS速度觀測器的參考模型和可調模型,采用了一階慣性濾波環節消除電壓模型中的純積分問題,利用ADALINE在線權值修正的特點,設計了一種自適應神經元PID控制器,并將此控制器作為MRAS結構中的自適應機制。最后在轉速為1 000 r/min和2 200 r/min的情況下進行了仿真驗證,其結果表明,電機速度辨識精度較高,動態性能也得到了改善。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
