一種感應電機轉子斷條故障建模方法
2020-03-25 05:17:22李楷然劉永強吳立泉梁兆文
微特電機 2020年3期
李楷然,劉永強,吳立泉,梁兆文
(華南理工大學 電力學院,廣州 510000)
0 引 言
感應電機已被廣泛應用于工業領域,持續不斷地為社會創造價值。對于處在生產線上持續運作的電機,發生故障導致停機對企業造成的經濟損失是巨大的。對于這類企業,凸顯了及早發現電機故障早期特征的重要性。在感應電機的各類故障中,軸承故障出現概率為41%,定子故障出現概率為37%,轉子故障出現概率為10%,氣隙偏心及其它故障出現概率為12%,因此,感應電機轉子故障診斷對社會經濟發展具有重要意義。
感應電機故障診斷常用的方法有定子電流特征分析法[1-3]、瞬時功率分析法[4-5]、振動診斷方法[6-7]、PARK空間矢量法[8-9]、氣隙轉矩分析法[10]、參數辨識的方法[11-12]和數據融合的方法[13-15],其中定子電流特征分析法是比較成熟和常用的方法,又可細分為快速傅里葉分析方法、小波分析方法、多窗譜分析方法和Hilbert模量頻譜分析方法等。隨著機器學習的發展和應用,當前越來越多地將各類方法與神經網絡相結合[16-19]來診斷電機故障。對于感應電機轉子早期斷條故障診斷,各方法均沒有給出一個較好的解決方案,導致轉子早期斷條故障特征不能被準確獲取,影響了感應電機轉子早期斷條故障的判別。
運用參數辨識方法進行感應電機故障診斷時,關鍵是準確建立感應電機故障模型。文獻[20]針對鼠籠式感應電機提出了多回路模型,能夠準確地描述感應電機斷條情況,但應用于感應電機轉子斷條故障診斷時,方程數較多,且需要針對斷條位置建立不同模型,這在電機斷條位置未知的情況下計算量是非常大的。本文基于鼠籠式感應電機多回路模型,提出了一種感應電機轉子斷條建模方法。該方法相較于多回路模型,方程數大為減少,結合參數辨識和滑窗技術能夠將感應電機轉子斷條的特征信號提取出來。仿真驗證了方法的有效性。
1 感應電機多回路模型方程
感應電機多回路模型是把電機轉子按實際回路來列寫方程[20],分為電壓方程和磁鏈方程:
電壓方程:
[iaibici1i2…inie]T+
p[φaφbφcφ1φ2…φnφe]T
(1)
磁鏈方程:
[iaibici1i2…inie]T
(2)
由文獻[21]可得電感系數Mxy的一般化計算公式:
(3)
式中:iy為電流;φxy為磁鏈;Λg為氣隙磁導;Nx和Ny分別為x相和y相繞組的串聯匝數;p為電機極對數;αxy為x相繞組軸線和y相繞組軸線之間的電角度。有:
式中:μ0為氣隙磁導率;τ為極距;l為鐵心有效長度;g為氣隙有效長度。
由此可得:
(4)
Ls=Lms+Lσs
(5)
(6)
(7)
(8)
(9)
(10)
(11)
式中:i,j=1,2,…,n,j≠i且j>i。設:
(12)
(13)

假設第j根鼠籠條斷裂,則回路電流ij+1=ij,相當于把回路j和回路j+1合并成一個回路。為得到感應電機轉子斷條一根的多回路方程,由文獻[20]可對式(1)和式(2)作如下處理:
(1) 電阻和電感矩陣的第j+4行元素和第j+4列元素分別加到第j+3行和j+3列對應的元素上;
(2) 刪掉電阻和電感矩陣的第j+4行和第j+4列;
(3) 刪掉電壓、電流和磁鏈矩陣的第j+4行。
經過上述處理,可以得到感應電機轉子斷條數量為一根時的多回路模型方程。
(14)
以11 kW的電機Y160M-4為例,假設第13根鼠籠條斷裂,對式(1)、式(2)和式(14)分別求解,將求解得到的電流和相應的電壓做快速傅里葉分解,并將分解結果畫成向量圖,如圖1~圖4所示。
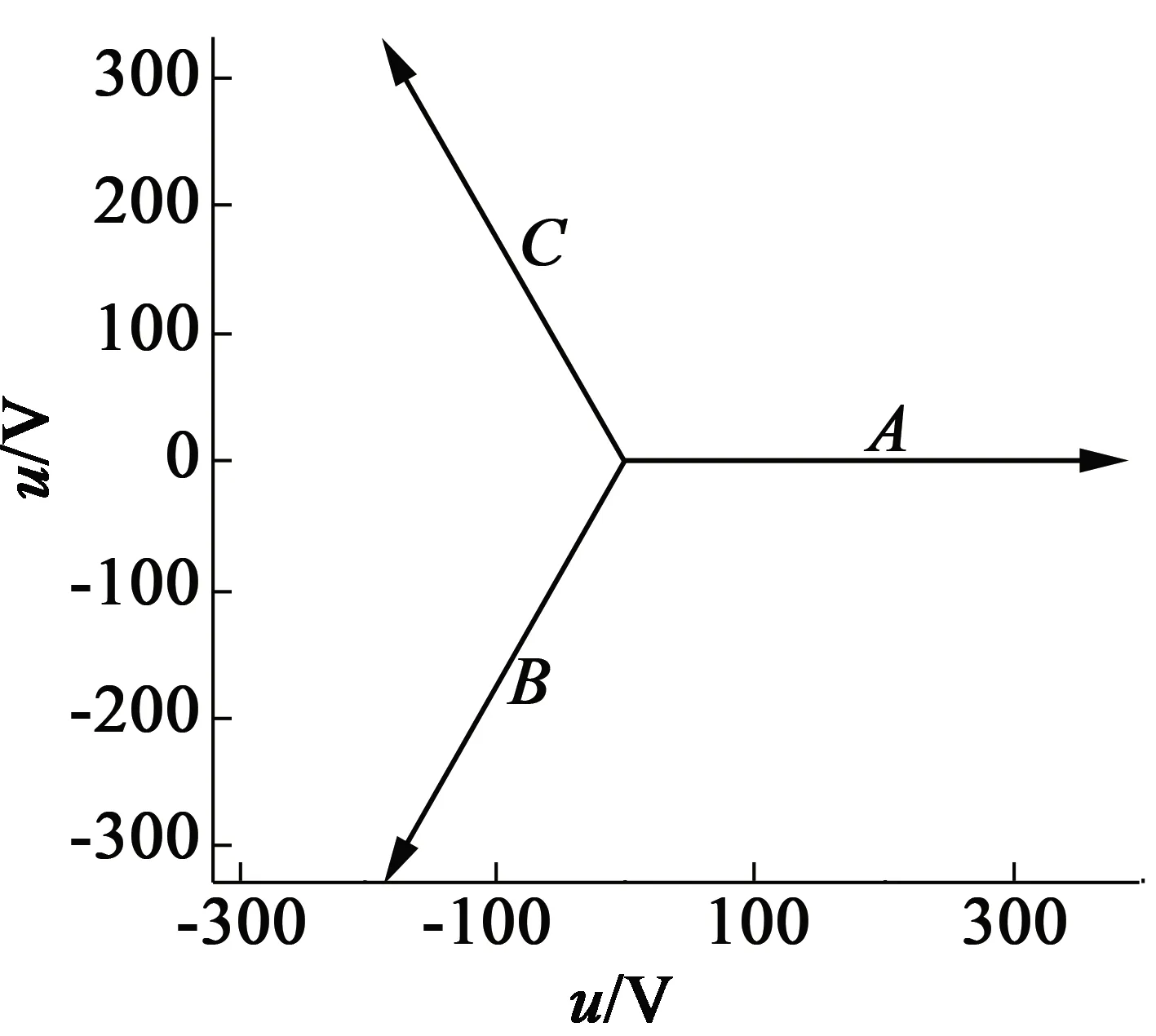
圖1 正常電機定子三相電壓向量圖
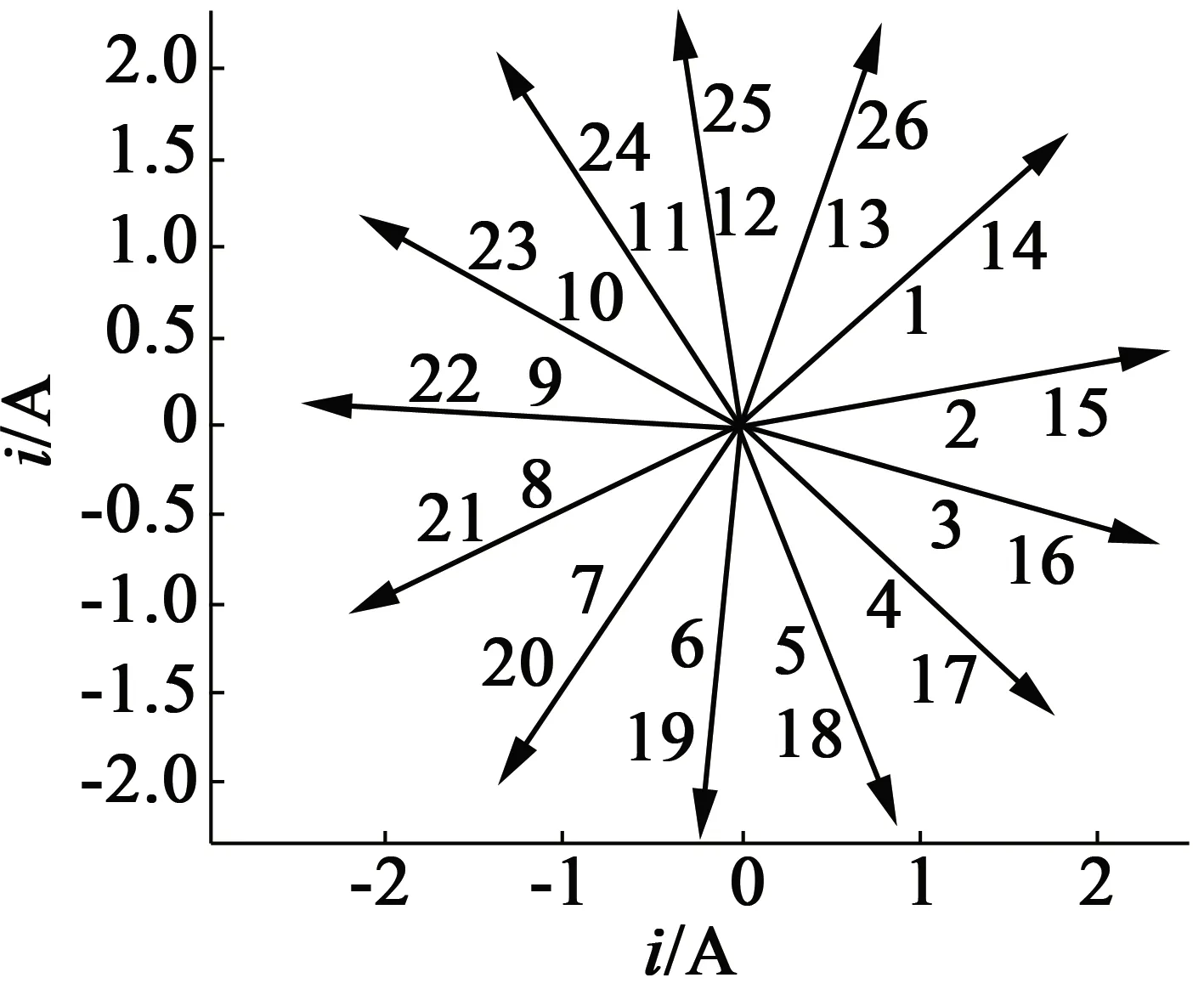
圖2 正常電機轉子各回路電流向量圖

圖3 斷條電機定子三相電壓向量圖
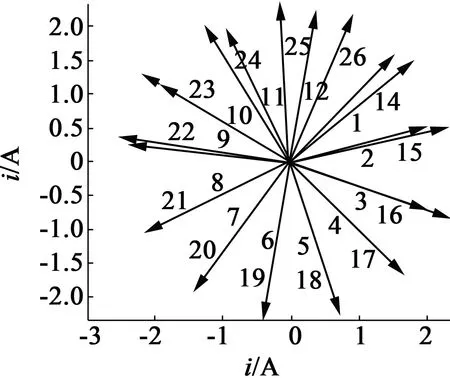
圖4 斷條電機轉子各回路電流向量圖
(15)
式中:q=1,2,3,…,n;θi為轉子回路1軸線與定子a相繞組軸線重合時轉子回流1電流的初相位;α為轉子相鄰回路軸線間的電角度。則有電機發生一根斷條時各轉子回路電流:
(16)
式中:q=1,2,…,n且q≠11,12,13,14;q1=12;α1為轉子回路11和轉子回路14 電流相位較正常時的變化量;k1為轉子回路12電流幅值較正常時的變化系數;k2為轉子回路11和轉子回路14電流幅值較正常時的變化系數。
令電機發生一根斷條的電流向量:
I1=[ia,ib,ic,i1,i2,i3,…,in]T
2 感應電機故障模型方程
設:
y1=(n-2)/2+cosα


(17)
式中:q=1,2,…,n且q≠11,12,13,14,q1=12。則有:
(18)
式中:
I1r=[i1,i2,…,iq1-1,iq1,iq1+2,…,in]T
(19)
(20)
(21)
故可設:

令:
式中:B1=[b11,b12,b13,…,b1,n+3],B2=[b21,b22,b23,…,b2,n+3],B3=[b31,b32,b33,…,b3,n+3],B4=[b41,b42,b43,…,b4,n+3]。
又有:
式中:q=1,2,…,n且q≠11,12,13,14,q1=12。
同理可得:
(22)
(23)
式中:
Lr1=y′(Lms+Lδr/y1)+ε3+ε4[cos(x)-sin(x)iqdr]
Lr2=y′(Lms+Lδr/y1)+ε3-ε4[cos(x)+sin(x)idqr]
[cos(x)-sin(x)iqdr]
[cos(x)+sin(x)idqr]
又有:
ε4=k2(Lms+Lδr/y1)[cos(3α-α1)-


idqr=idr/iqr
iqdr=iqr/idr
x=2(θ1-θr)-2(q1-1/2)α
以故障模型輸出電流響應建立函數Fi,則有:
Fi=f(x,θu,rs,Rr,Lms,Lδs,Lδr,n,α,ωr)
(24)
對于一臺具體的電機,其rs,Rr,Lms,Lδs,Lδr,n,α,ωr是確定量,此時有:
Fi,1=f1(x,θu)
(25)
式中:θu為輸入a相電壓初相角。
以實測電機電流Fi,real與Fi,1建立目標函數:
(26)
將x作為自變量,則在最優解時有:
x=g(θu)
(27)

3 感應電機參數辨識

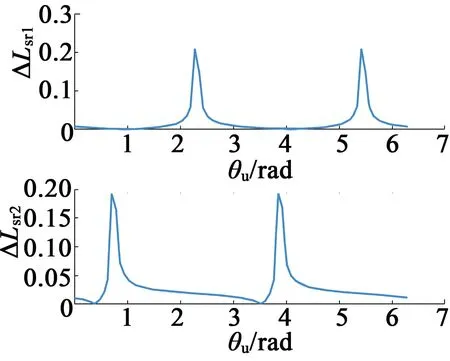
圖的變化曲線

圖6 Lr的變化曲線
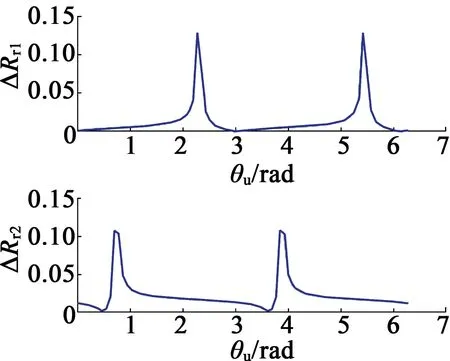
圖7 Rr的變化曲線

因此,通過本文的建模方法,當電機發生斷條故障時,利用參數辨識和滑窗技術相結合的方法可獲取較明顯的尖峰特征信號,可用于檢測電機是否發生了斷條故障。
4 結 語
本文針對感應電機發生一根斷條的情況,以一臺11 kW電機為例,論述了一種感應電機轉子斷條建模方法的過程和原理,該建模方法在與參數辨識和滑窗技術相結合后,可獲取明顯的感應電機轉子斷條故障特征信號,克服了感應電機發生早期斷條故障時等效參數特征不明顯的問題,可用于診斷感應電機轉子斷條故障。同時該建模方法也為利用信息融合技術進行電機故障診斷提供了一條路徑。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
Coco薇(2016年2期)2016-03-22 02:42:52
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
機械與電子(2014年1期)2014-02-28 02:07:31
