基于花授粉算法的無刷直流電動機速度控制研究
2020-03-24 12:00:20孫彥超吳桂峰
微特電機 2020年3期
關鍵詞:優化
張 娟,孫彥超,高 楊,吳桂峰
(1.揚州工業職業技術學院 智能制造學院,揚州 225127;2.揚州大學 水利與能源動力工程學院,揚州 225002)
0 引 言
無刷直流電動機(以下簡稱BLDCM)是隨著機電一體化技術發展出現的一種新型電動機,它由電機本體和驅動器兩部分組成。傳統直流電機因帶有電刷和換向器,應用受到了很大限制。BLDCM使用電力電子器件的開關作用代替電刷和換向器實現電流的換相,克服了傳統直流電動機結構上的缺點,同時又保留了直流電動機控制性能好的優點[1-3]。BLDCM體積小,結構簡單,易于維護,壽命長,現已廣泛應用于家用電器、汽車、工業控制器以及航空航天等領域。
BLDCM速度控制系統最常用的控制策略是PID控制,這種控制方案易于實現,適用性廣,魯棒性強,其控制效果的優劣主要在于參數(比例系數Kp、積分時間常數Ki和微分時間常數Kd)的整定和優化。近年來,研究人員針對BLDCM控制系統中的PID參數在線優化做了許多工作。文獻[4]研究了自整定模糊PID控制的BLDCM調速系統,有效降低了轉速變化過程中的超調量。文獻[5]研究了遺傳算法在線優化PID參數,有效地降低調速過程中電機的轉矩脈動和磁鏈紋波。文獻[6]研究了粒子群算法在模糊PID控制器參數優化領域的應用,有效提高了控制系統的動態性能。
本文研究了用于BLDCM速度控制的新型控制組合:花授粉算法-PID-電流滯環控制方法。用花授粉算法在線優化PID參數,以滿足系統在不同工作狀態下的控制要求,改善電機調速過程中的動態性能。
1 BLDCM電流滯環控制方案
常用的BLDCM控制方法有矢量控制、雙PI控制、直接轉矩控制和電流滯環控制等方法,本文研究使用的是電流滯環控制方法。電流滯環控制是一種脈沖寬度調制(PWM)跟蹤技術,具有響應速度快、實時性好、魯棒性強、設計簡單、易于實現等優點[7]。
使用電流滯環控制的BLDCM轉速控制系統如圖1所示。在此系統中,給定速度ω′與測量速度ω之間的差值送入PID控制器,PID控制器輸出扭矩指令。參考電流發生模塊根據扭矩指令和電機扭矩參數計算出參考電流的大小,此電流對應著轉子的角位置。在電流滯環控制器中將參考電流與實際測得的電流(ia,ib,ic)進行比較,由兩者的誤差產生PWM控制信號,這就是電流滯環控制。PWM信號控制三相逆變器中的電力電子開關元件,平穩控制電機的相電流,使電機正常運轉。
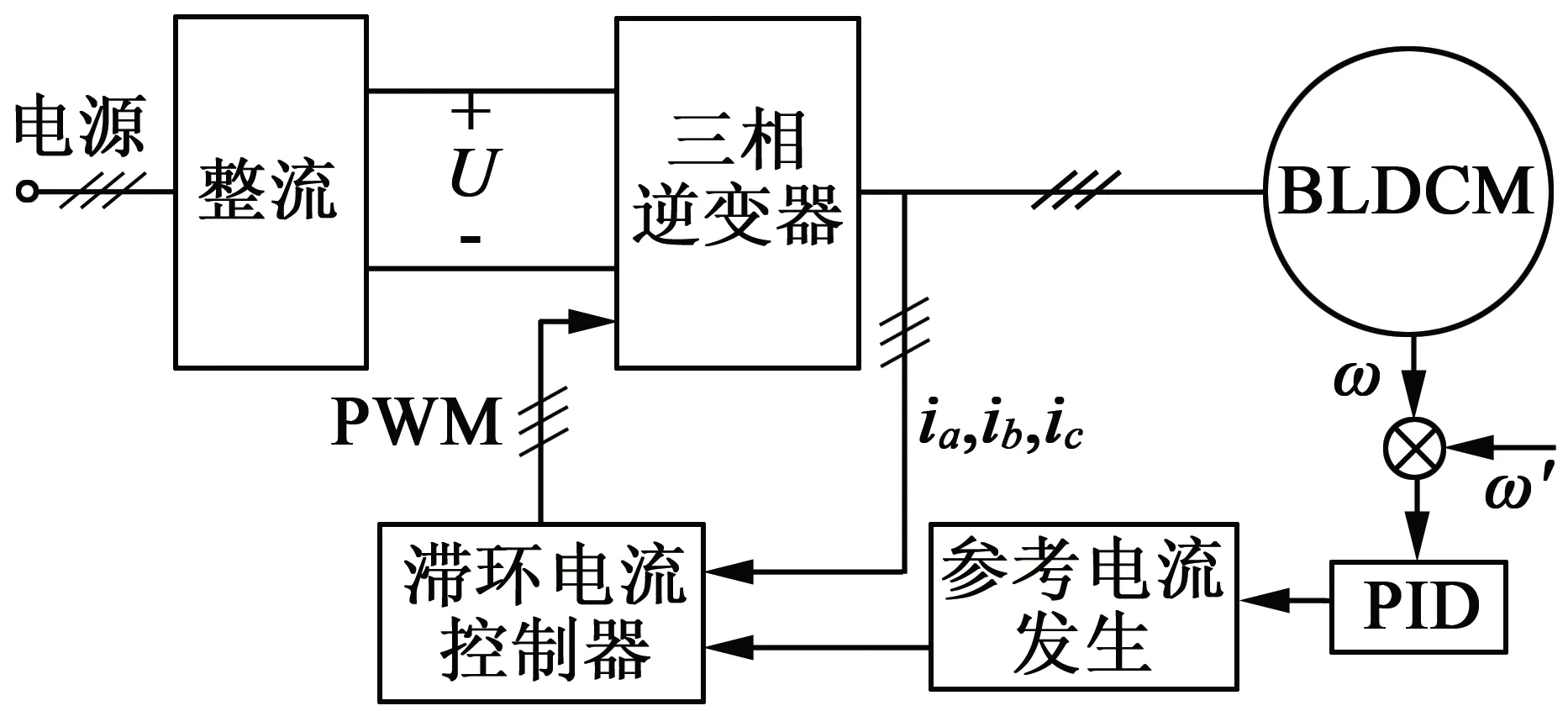
圖1 BLDCM電機電流滯環速度控制系統
上述速度控制系統的速度跟蹤能力取決于PID控制的增益Kp,Ki和Kd。傳統PID控制器的增益不能在線自整定,難以滿足不同工況下對電機控制的要求[8]。本文引入一種源于自然啟發的智能算法——花授粉算法(以下簡稱FPA),采用FPA-PID技術,將積分平方誤差作為迭代目標函數,尋求最佳PID增益參數,實現PID控制器的在線自整定。
2 FPA-PID速度控制系統
2.1 FPA-PID速度調節器的組成
FPA-PID速度調節器組成如圖2所示,e(t)是給定值與實際測量值的偏差,e(t)平方的積分值是尋優過程中的目標函數,花粉的位置矢量由PID參數(Kp,Ki和Kd)構成,按FPA進行迭代,尋找符合目標函數要求的最優Kp,Ki和Kd值。該系統的PID增益隨著電機的工作狀態變化而自動調整,克服了傳統PID調節器無法在線自整定的缺陷,提高了BLDCM速度控制系統的性能。
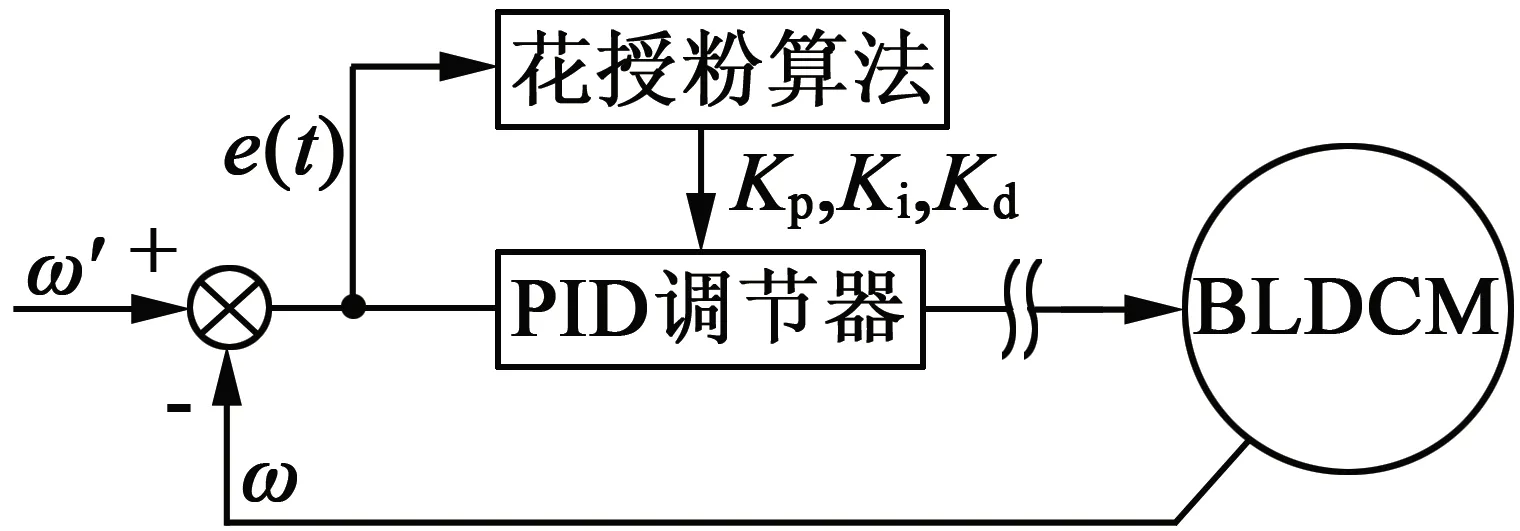
圖2 FPA-PID控制器組成示意圖
2.2 FPA
2012年,Xin-she Yang提出了這種算法,該算法模擬了開花植物授粉過程中涉及的自然行為。生物進化論認為,開花植物通過授粉繁殖是一個物種的優化過程,花授粉的目標是實現物種的最佳繁殖。在此過程中,參與授粉的花粉遵循優勝劣汰的規律。在FPA中,衡量每個花粉優劣的依據是花授粉的距離,并根據判斷的結果更新花粉的位置(坐標),使其靠近最佳的結果[9-10]。
自然界有兩種形式的授粉方法:生物和非生物。昆蟲或鳥類等傳粉者參與授粉的方法稱為生物授粉,而相反,沒有任何外部傳粉者的授粉被稱為非生物授粉。此外,授粉過程也可以分為自花授粉或異花授粉。異花授粉只不過是將花粉從一個開花植物轉移到另一個植物的花中。而自花授粉是同一開花植物中從一朵花到另一朵花的授粉,不需要任何傳粉者。從距離上看,花授粉有全局授粉(遠處的花或附近的花)和局部授粉(自花和附近的花)兩種,一般認為局部授粉的概率大于全局授粉。FPA算法的流程如圖3所示。

圖3 FPA算法流程圖
2.3 算法的實現
2.3.1 參數的設定
描述花粉群體P的數學表達式如下:
(1)

2.3.2 花粉位置的更新
在FPA中,按以下四條規則來更新花粉位置:
(1) 全局授粉過程中,攜帶花粉的生物飛行時符合“Lévy分布”規律;
(2) 局部授粉認為只能是生物授粉和自花授粉兩種情況;
(3) 花繁衍概率正比于兩朵花的相似性;
(4) 全局授粉和局部授粉之間的轉換概率由一個隨機數p確定。
可見,全局授粉和局部授粉是開花植物進化的核心,規則(1)~規則(3)可由下式來實現:
(2)
(3)

(4)
式中:Γ(λ)是標準伽馬函數;λ是吸引系數;s值應大于0并足夠大,s由蒙塔納算法來確定,如下式:
(5)
式中:u~N(0,σ2)的含義是從一個標準高斯分布中抽取樣本,該分布的特點是平均值等于0、方差為σ2,用下式來計算σ2:
(6)
由規則(4)可得到花粉坐標更新公式:
(7)
式中:p為轉換概率,p∈(0,1),文獻[11]研究表明,p取0.2,算法性能最優。
2.3.3 目標函數的選擇
本次研究的對象是BLDCM的速度控制,算法迭代時的目標函數使用積分平方誤差(ISE)[12],其表達式如下:

(8)
式中:e(t)是設定值和輸出值之間的偏差。
3 實驗與結果分析
3.1 實驗實施過程
實驗時使用的硬件如圖4所示。光電編碼器用來測量電機的轉速,使用的是2 000脈沖/轉的增量式編碼器。dSPACE DS1103控制板接收現場采集的信號并傳輸給PC機,同時接收PC機的輸出信號,生成PWM控制信號,控制三相逆變器。PC機根據給定值和輸出值的偏差,按FPA-PID控制規律形成控制策略,并輸出到dSPACE DS1103控制板,由后者生成PWM信號。
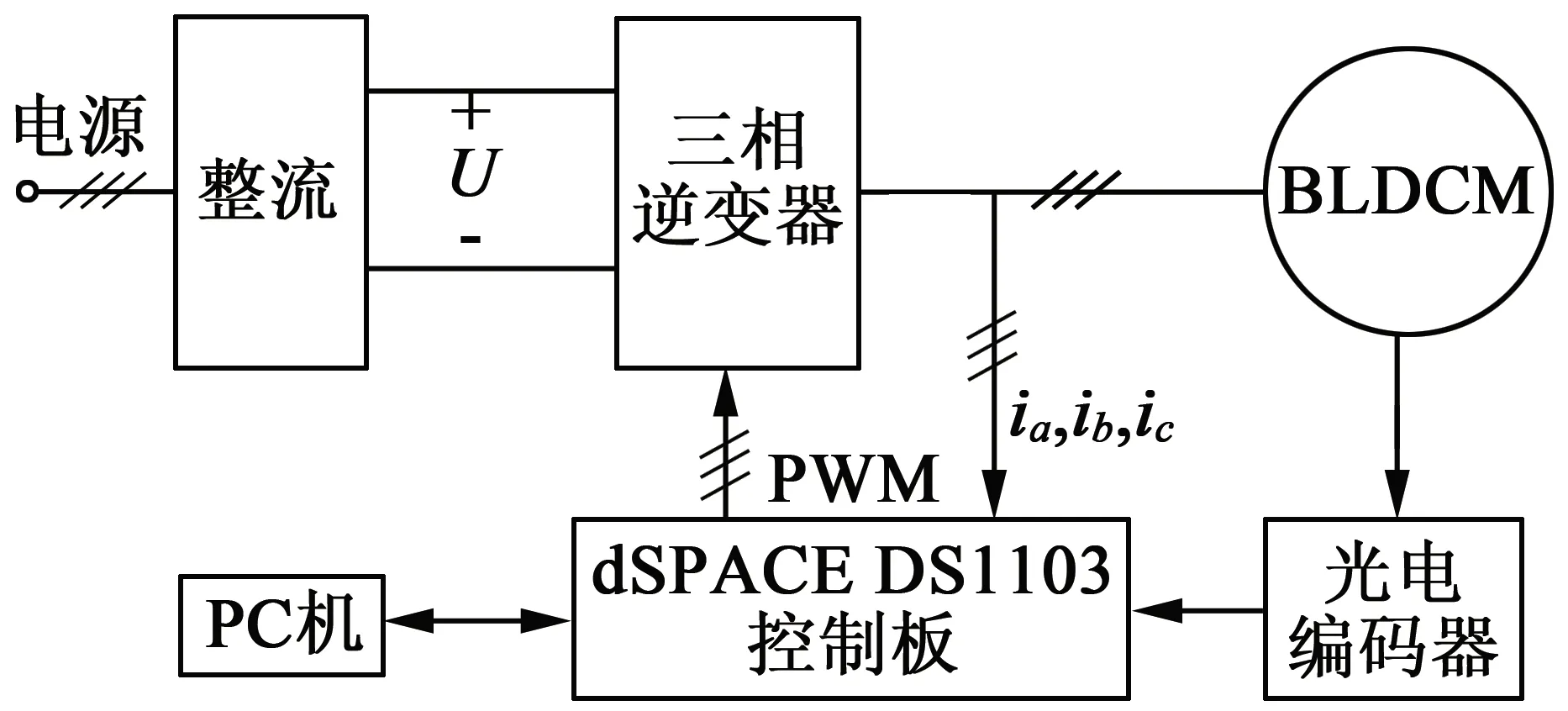
圖4 實驗系統組成框圖
實驗使用的BLDCM參數:功率0.75 kW,極數6,線電阻1.5 Ω,轉動慣量為8.261 4×10-5kg·m2,電感6.1 mH,電壓310 V,扭矩常數0.214 8 N·m/A。
花授粉算法初始化數據:PID增益取值范圍為[0,50],花粉種群數量X=25,步長縮放系數γ=1,吸引系數λ=2,轉換概率p=0.2,迭代次數=500。
3.2 實驗結果分析
為了更好地驗證FPA-PID系統參數優化的性能,研究人員針對不同的輸入指令進行了仿真研究。用MATLAB/Simulink仿真軟件對實驗數據進行分析,繪制出BLDCM輸出轉速的跟隨曲線,并與傳統PID控制系統進行比較。圖5是階躍輸入時的轉速響應曲線,給定轉速是300 r/min。圖6是斜坡輸入時的轉速響應曲線,給定值是4 s內轉速從0上升到1 000 r/min。兩種情況下的輸出轉速上升曲線均表明,與傳統PID控制系統相比,FPA-PID控制系統的動態和穩態性能有明顯的改善。
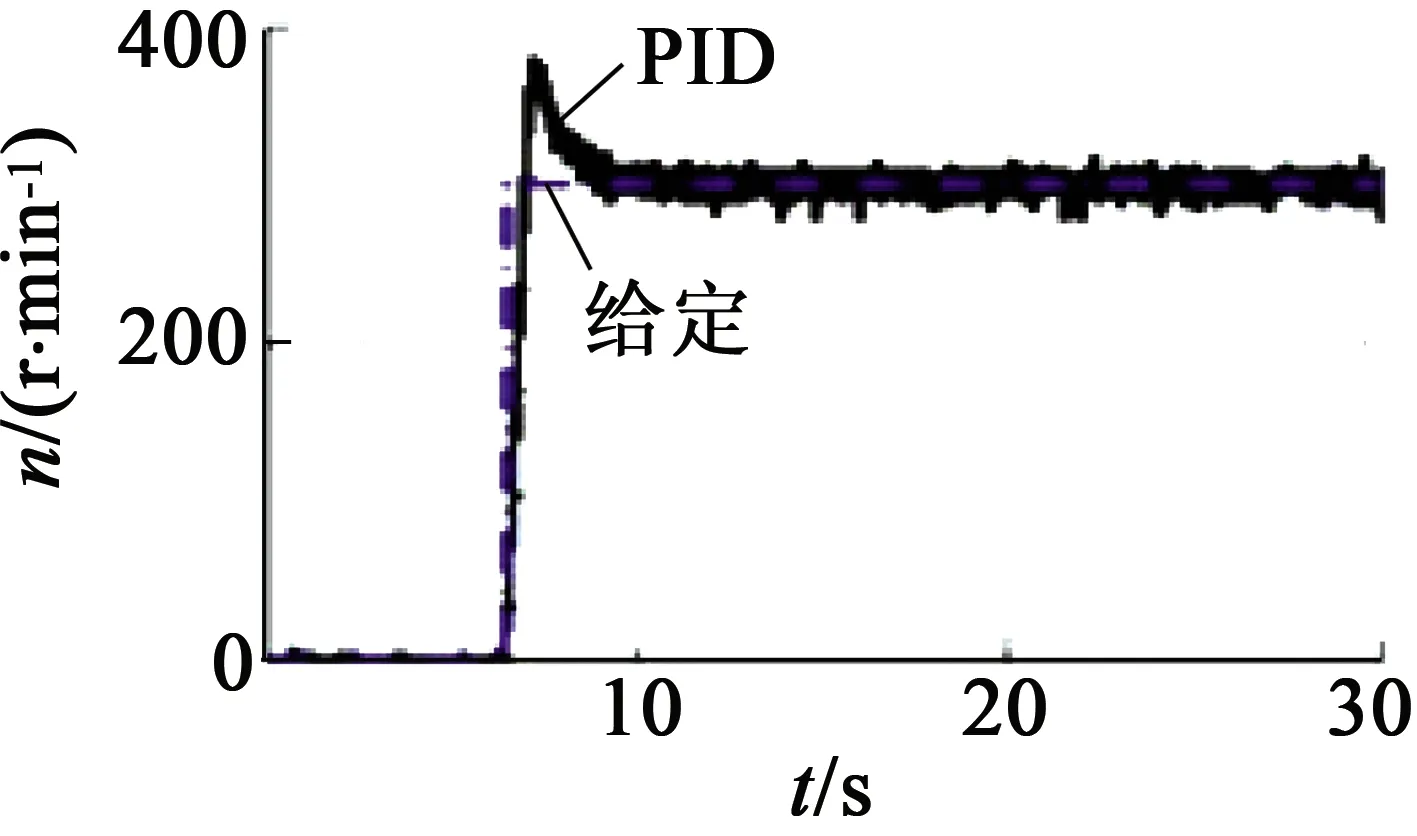
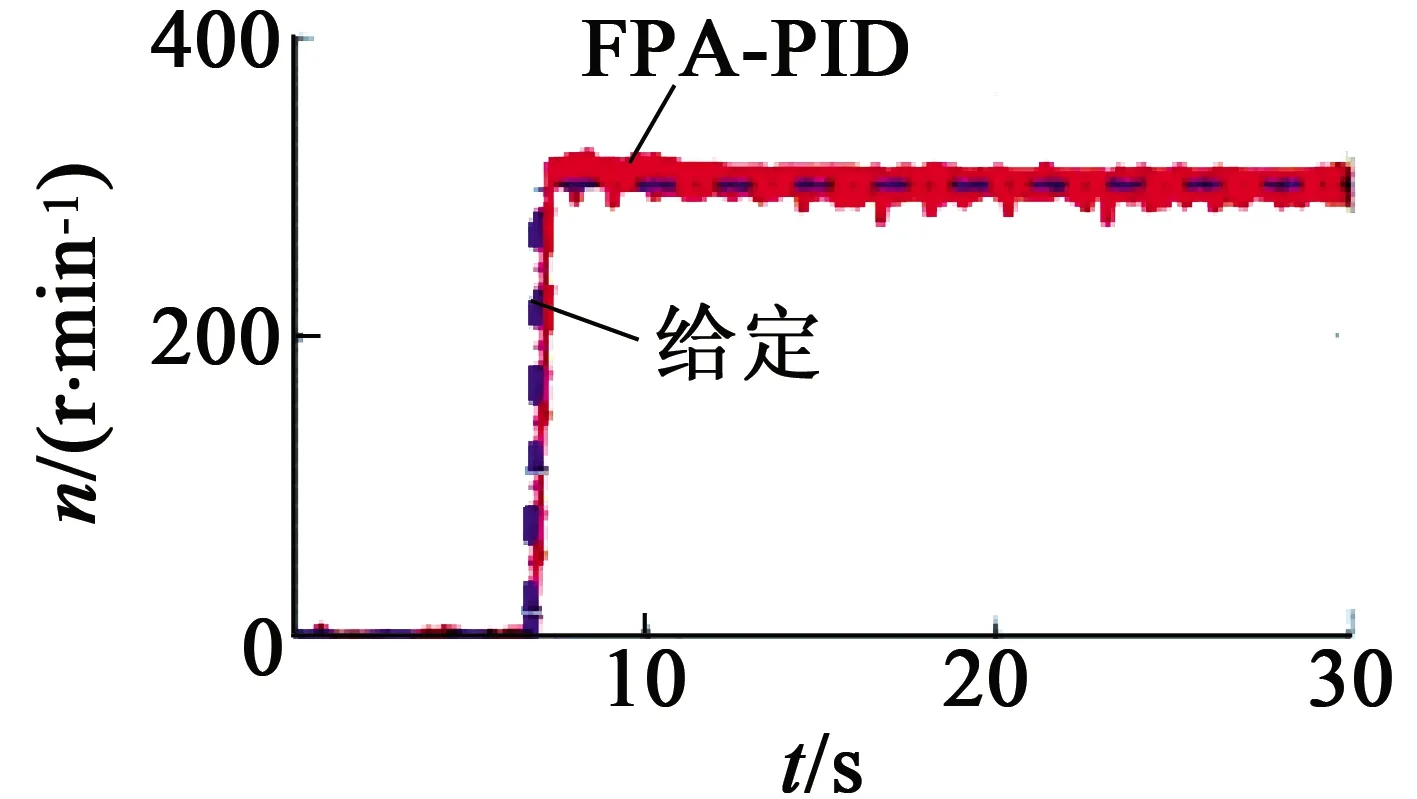
圖5 階躍輸入時的轉速響應曲線
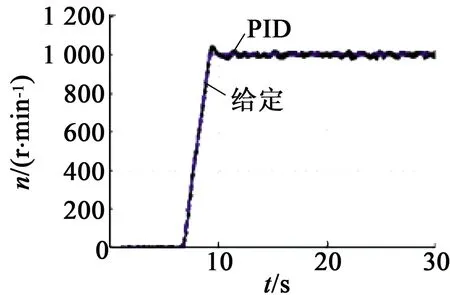
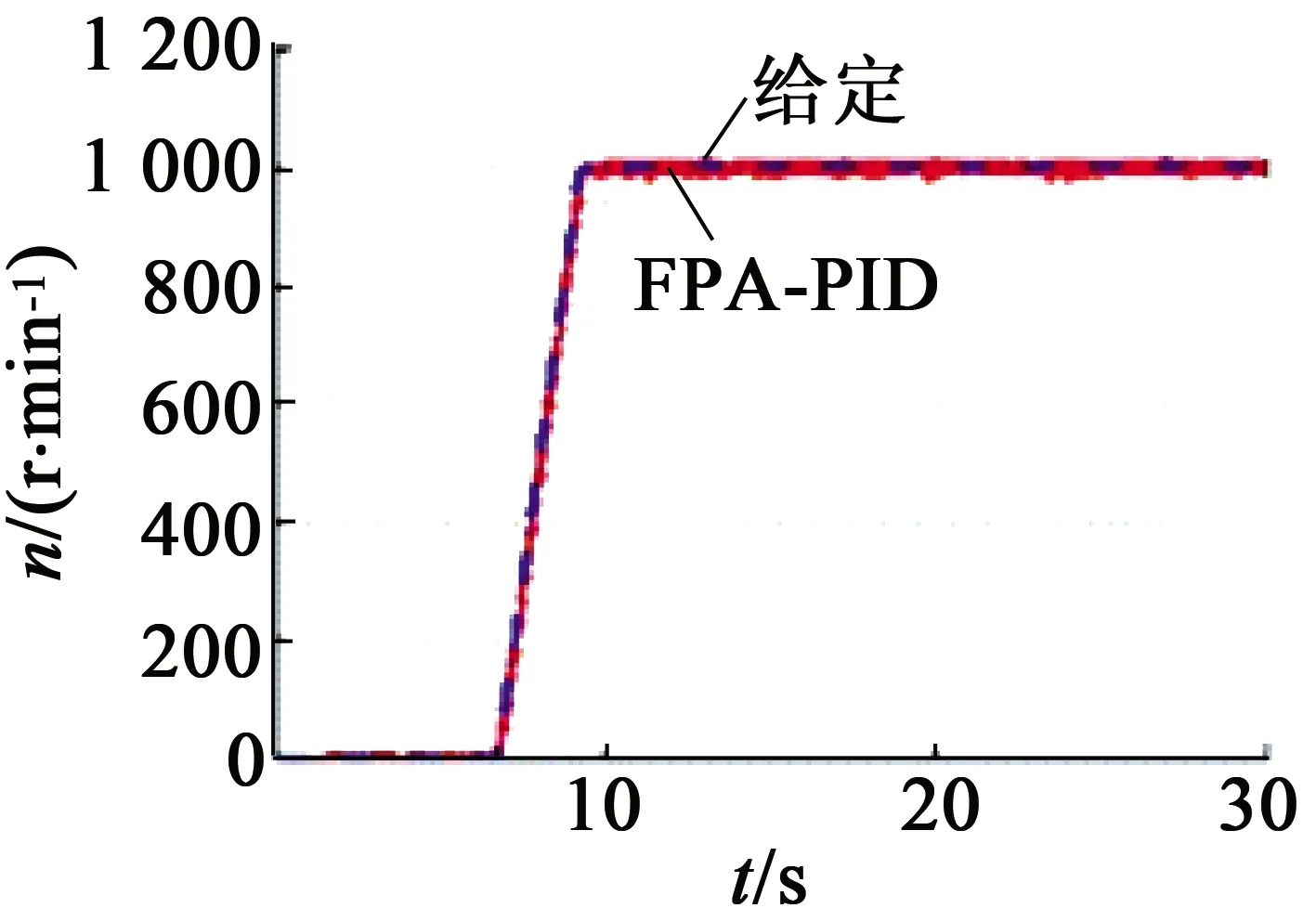
圖6 斜坡輸入時的轉速響應曲線
4 結 語
本文引入FPA來實現BLDCM控制系統PID參數的在線優化。使用該算法,以積分平方誤差為目標函數,優化PID增益參數,成功應用于一個電流滯環控制的BLDCM調速系統。仿真結果表明,用這種優化方法控制BLDCM,不僅能實現電機平穩運轉,而且提高了控制系統的性能。此方法在伺服電機控制方面有著不錯的應用前景。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
