工業機器人實驗裝置研究
2020-06-08 00:47:20王華
商丘職業技術學院學報 2020年1期
關鍵詞:學生
王 華
(商丘職業技術學院,河南 商丘 476100)
工業機器人是應用于工業環境的一種自動化生產裝置.該裝置通過人工編制機器人程序,在電力驅動下,由PC機帶動伺服電機實現機器人的運動、定位等.為工業機器人裝上夾爪、焊槍、噴頭則可以代替人工完成搬運、焊接、噴涂等高難度的工作.隨著工業技術的快速發展,工業機器人應用越來越廣泛,而操作工業機器人的人才卻遠遠滿足不了其應用需求.因此,工業機器人成了高職院校的一項熱門專業,工業機器人技術應用也成了一門專業核心課程.這門課程是一門動手性很強的課程.因此,實訓課上若僅用一臺機器人本體,就不能很好地提高學生的動手能力和學生對知識的綜合應用能力,并且一臺機器人本體價格也比較昂貴,一次性購買大量機器人本體對高職院校來說是一個很大的資金壓力,也是一個很大的資源浪費.因此,工業機器人集成系統符合職業院校教學需求,具有很大的應用價值.
把一臺機器人本體和幾個工作站集成在一個工作臺上,每個工作站既可以獨立操作,工作站與工作站之間又可以通過以太網通信.工作臺既可以單獨培訓學生工業機器技能,又可以培訓學生對PLC的綜合應用能力,不僅充分發揮了工作臺的價值,而且一定程度上緩解了高職院校購買大量實驗設備的資金壓力.
2 工業機器人實驗裝置工作任務
2.1 工業機器人人才培養的重要性
機器人的出現是人類社會發展、工業經濟發展、技術發展的必然趨勢.它把人不能干、人干不了、人不愿意干的活承擔下來.它可以在高溫、高熱、高污染、高危險的環境下工作,并且可以使工業生產的自動化程度得到提高.目前,中國社會的老齡化嚴重,人口紅利消失,人海戰術失去優勢,招人難、留人難、人難管的現象嚴重,機器人的出現滿足了用工需求.隨著工業機器人被大量引入到生產領域中,機器人的操作編程維護人才日趨短缺,因此,急需高職院校能夠培養出大量的能適應崗位要求的工業機器人技術人才[1].
2.2 工業機器人專業人才培養目標
知識目標:掌握工業機器人基本理論知識;理解工業機器人工具坐標、工件坐標的含義和創建方法;理解工業機器人常用的編程語言;掌握ABB robotstudio軟件使用方法;掌握動態工作站的創建方法;理解Profinet的通訊原理.
技能目標[2]:
1)能熟練地創建工業機器人工具坐標、工件坐標;2)能夠操作機器人按照軌跡要求行使;3)能讀懂工業機器人外圍設備可控制線路原理圖并排除常見電氣故障;4)能夠在線編程,調試機器人實現搬運、裝配、視覺分揀等功能;5)能正確使用robotstudio軟件進行動態工作站的創建和離線編程;6)能正確安裝和調試工業控制網絡系統.
素質目標:
1)通過分組實訓培養學生團隊合作的能力;2)培養學生面對問題時能夠獨立思考,解決問題的能力;3)在項目實習中培養學生愛崗敬業的能力,讓學生在做項目的過程中尊重崗位、尊重職責、學會擔當;4)培養學生的學習能力和創新能力,面對問題有自己的思路和方法.
2.3 實訓集成系統的工作任務
1)工業機器人基本操作;2)工業機器人機械原點矯正;3)工業機器人工具坐標、工件坐標創建;4)工業機器人目標點示教;5)工業機器人軌跡運動編程;6)工業機器人搬運碼垛工作站編程;7)工業機器人裝配編程;8)工業機器人和PLC、觸摸屏、伺服電機之間的通信、編程、控制;9)每個工作站之間的切換可以實現手動控制,也可以通過觸摸屏實現自動控制.
3 實驗裝置集成系統構成
3.1 基礎實驗部分
工業機器人基礎實驗部分,需要在一個操作臺上放置IRB120機器人本體,并配置DQS652控制器,工業網絡選擇709-1 DeviceNet Master,適配器選用840-2 PROFIBUS anybus Device.操作臺上有工具坐標練習、目標點示教、軌跡運行、簡單編程練習等基礎操作練習模塊.
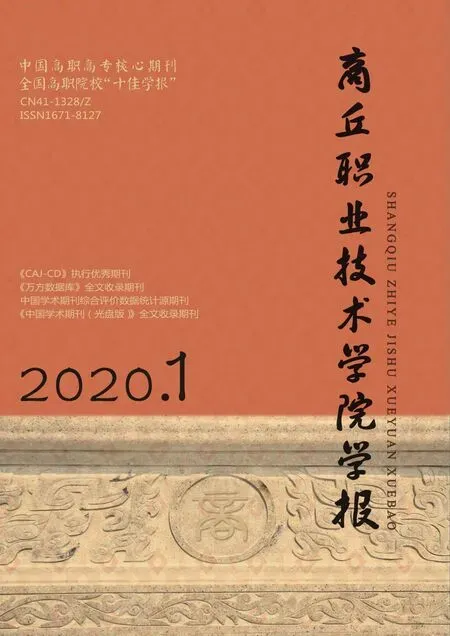
通過本基礎工作站,可以讓學生練習工業機器人原點校訂,掌握原點校訂的方法;使學生對工件坐標和工具坐標的理解形象化、深刻化;熟練掌握工件坐標和工具坐標的創建方法;練習目標點的示教,同時利用偏移指令、移動指令等可以使機器人輕松地達到預定的軌跡,實現自動控制;練習應用基本指令畫橢圓、圓形軌跡等.圖1所示的是基本操作練習模塊.
圖2所示的是一個飛馬的圖案,根據這個現有的軌跡,可以讓學生練習操作機器人走出軌跡圖形.通過本工作站的操作練習,讓學生達到熟練掌握各種簡單指令的使用以及靈活創建工具坐標和工件坐標的目的.
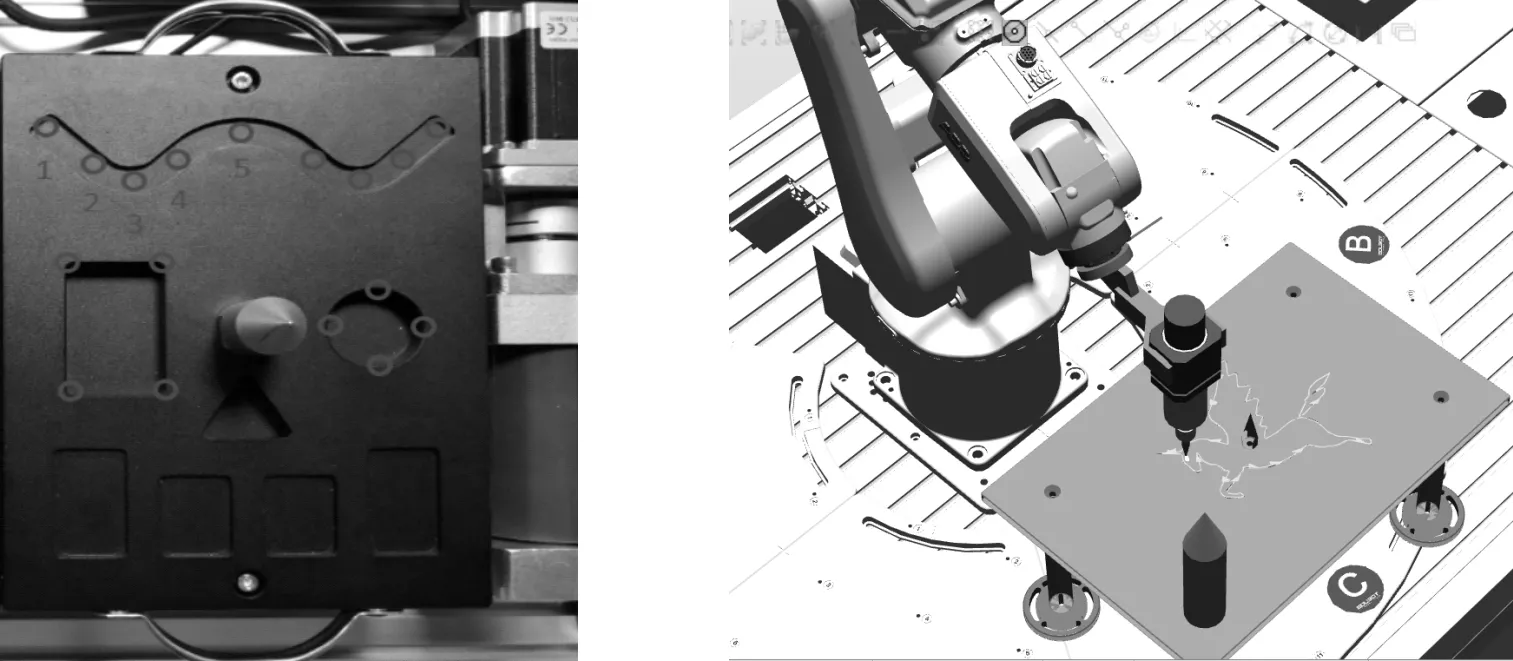
圖1 基本操作練習模塊 圖2 飛馬圖形軌跡
3.2 搬運碼垛裝配工作站
碼垛,用很通俗的語言來說就是將物品整齊地堆放在一起.起初碼垛都是由人工進行的,但隨著科學技術的發展,人工碼垛已慢慢地退出了這個舞臺,取而代之的則是機器人碼垛.從近期看,機器人碼垛剛開始投入的成本看上去會很高,但是,從長期的角度來看,機器人碼垛的優點是顯而易見的.就工作效率來說,機器人碼垛不僅速度快、美觀,而且可以不間斷地工作從而極大地提高了工作效率.人工碼垛卻存在很多危險性.機器人碼垛,效率和安全一手抓,應用性強,適用范圍廣.
圖3所示是一個搬運碼垛工作站.3號設備是立體倉庫模塊,4號設備是裝配定位模塊,5號設備是物料傳送帶模塊.物料傳送帶模塊是由PLC驅動伺服電機控制的,工作原理是機器人1號夾爪從立體倉庫模塊拾取1號物料盒放置在裝配定位模塊后氣缸推出,對物料盒進行定位,氣缸收回.此時,機器人向PLC發出信號,驅動傳送帶的氣缸推出,物料從料桶推出到傳送帶上,光電傳感器感應到物料后向PLC發出信號,驅動伺服電機工作,把物料傳送到傳送帶的末端,傳送帶末端的光電傳感器感應到物料后發信號給機器人,由機器人2號卡盤拾取物料,裝配到裝配定位模塊的物料盒里,然后由機器人1號夾爪把物料連同物料盒放回到立體倉庫模塊1號位置,然后拾取2號物料盒到裝配模塊,依次進行,直至裝配完四個物料,分別放置在立體倉庫的四個位置,機器人回原位.
在本工作站中,PLC主機模塊選擇的是西門1200PLC,主機型號是CPU1212C DC DC DC,擴展輸入輸出部分可以選用華泰模塊.采用以太網,在同一個網段上分別給PLC、觸摸屏、機器人、上位機設置一個不同的IP地址,用網線把幾個設備通過路由器連在一起實現通信[3].

圖3 搬運碼垛裝配工作站
3.3 視覺分揀工作站
隨著時代的發展,高效、快速是生產技術領域的主要任務要求.為解放多余勞動力,提高生產效率、減少生產成本、縮短生產周期,工業機器人與視覺系統結合的智能分揀便應運而生,它可以代替人工進行貨物分類、搬運、裝卸工作或代替人類搬運危險物品.
機器人工件識別與分揀平臺主要由圖像采集系統、圖像處理系統和機器人系統三部分組成[4].系統整體框圖如圖4所示.

圖4 視覺分揀工作站
1)圖像采集系統主要包括信捷相機、LED光源以及通訊數據線.信捷相機是圖像采集系統的主體機構,通過網線與上位機相連,完成圖像的傳輸.相機通過螺絲緊固件固定在工作站的一個合適的位置.在該工作站中,機器人每一次拾取物料都要來到相機位置處拍照,實現圖像的采集并進行編碼.
2)圖像處理系統是由上位機和圖像處理軟件組成.相機采集的圖像數據通過通訊數據線傳給上位機,經過圖形處理軟件完成圖像處理和工件識別,并實現解碼.工業機器人和上位機之間通過profinet進行連接,上位機把圖像處理軟件解碼的數據發送給機器人,實現目標工件的位置信息的傳輸.
3)機器人系統指工業機器人在該工作站中實現工件的分揀.機器人根據圖像處理軟件處理的數據分辨出各個工件是放在次品的盒里,還是根據工件的不同形狀把其放在不同的位置,實現工件的分揀.
4 結語
本文對工業機器人集成系統進行了研究,根據課程進度由淺入深地安排了幾個實訓工作站,有單個知識點的應用,也有整個知識系統的綜合應用,符合學生能力發展特點和人才培養需求,同時也充分地利用了教學資源,提高了教學設備利用率.
猜你喜歡
作文大王·笑話大王(2021年4期)2021-04-26 19:00:35
英語文摘(2020年9期)2020-11-26 08:10:12
甘肅教育(2020年6期)2020-09-11 07:45:16
甘肅教育(2020年22期)2020-04-13 08:10:54
甘肅教育(2020年20期)2020-04-13 08:04:42
當代陜西(2019年5期)2019-11-17 04:27:32
電影(2018年9期)2018-11-14 06:57:21
作文世界(小學版)(2018年4期)2018-10-16 17:13:34
快樂作文·低年級(2016年12期)2017-01-03 20:52:44
快樂作文·低年級(2016年6期)2016-06-24 18:58:40