某型發動機高空小表速轉速擺動問題分析
2020-06-13 06:18:50李楊
航空發動機 2020年1期
李 楊
(海軍駐沈陽地區第二軍事代表室,沈陽110043)
0 引言
某型發動機在進行高空小表速試飛時,在高度11 km以上,表速小于500 km/h時出現轉速擺動的問題,此時發動機控制計劃為按照低壓轉子轉速通道限制值控制發動機最大工作狀態,n1擺動量超出了允許的擺動范圍,影響飛行安全[1];按照高壓轉子轉速n2和排氣溫度T6限制通道控制發動機時,發動機工作穩定,無參數擺動情況。國內同系列原型發動機在相同的工作狀態點則無轉速擺動問題。
本文通過對發動機低壓轉子轉速控制通道進行對比分析[2-4],基于當前控制系統架構和發動機起動加速性的特殊要求,提出低壓轉子轉速控制通道分段控制措施[5]。
1 低壓轉子轉速控制原理
當采用綜合電子調節器進行低壓轉子轉速n1閉環控制時,控制回路由綜合電子調節器、S1占空比電磁閥、執行活門、選擇活門、校正活塞、隨動活塞、計量活門、供油管路、發動機、轉速傳感器以及電纜組成。此時,被控量為n1轉速,控制量為主燃油流量。
其中綜合電子調節器負責根據發動機進口總溫T1信號設定n1轉速的限制值,根據n1傳感器的采集,生成n1限制值和反饋值的偏差信號,從而生成對應的電壓信號ΔU,并利用喘振壓差信號ΔPck對電壓信號進行微分補償,得到失調電壓ΔUppt,根據失調電壓計算S1占空比,輸出到主燃油泵調節器的S1占空比電磁閥,從而控制發動機供油量,實現按n1轉速控制發動機最大工作狀態的功能[8],如圖1所示。
2 原因分析
在某型發動機研制初期地面起飛加速性攻關時發現,綜合電子調節器在發動機轉速85%時開始限制供油,從而降低了發動機加速性能。為適應發動機地面起飛加速性要求,綜合電子調節器低壓轉子轉速n1通道的超前環節比例系數k2變小(見表1),從而減少加速過程中S1對加速油量的限制,提高發動機加速性。改進后,經地面試驗和專項試車驗證,在發動機加速過程中92%轉速時開始限制供油,從而提高發動機加速性,滿足某型發動機地面加速性要求。
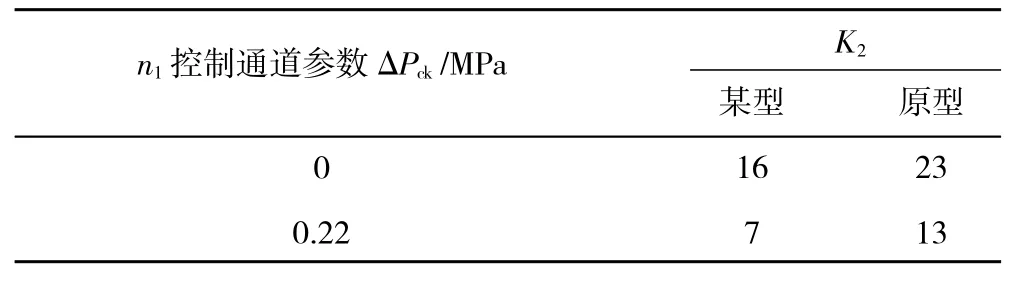
表1 n1超前環節比例系數K2對比
但在高空小表速工作條件下,由于發動機工作負載減小,系統閉環控制的穩定裕度減小,導致在發動機高空小表速條件下工作時,易出現n1轉速擺動問題[9-10]。
3 建立數學模型
發動機轉速閉環控制系統有3個環節:控制器(綜合電子調節器)、執行機構(主燃油泵調節器)、被控對象(發動機),如圖2所示。
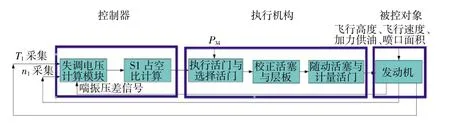
圖2 n1控制回路仿真原理
根據n1控制回路各環節的功能,將其劃分為6個模塊,基于AMESIM仿真軟件分別進行建模和仿真驗證[11-15],并集成整個n1控制回路模型,如圖3所示。
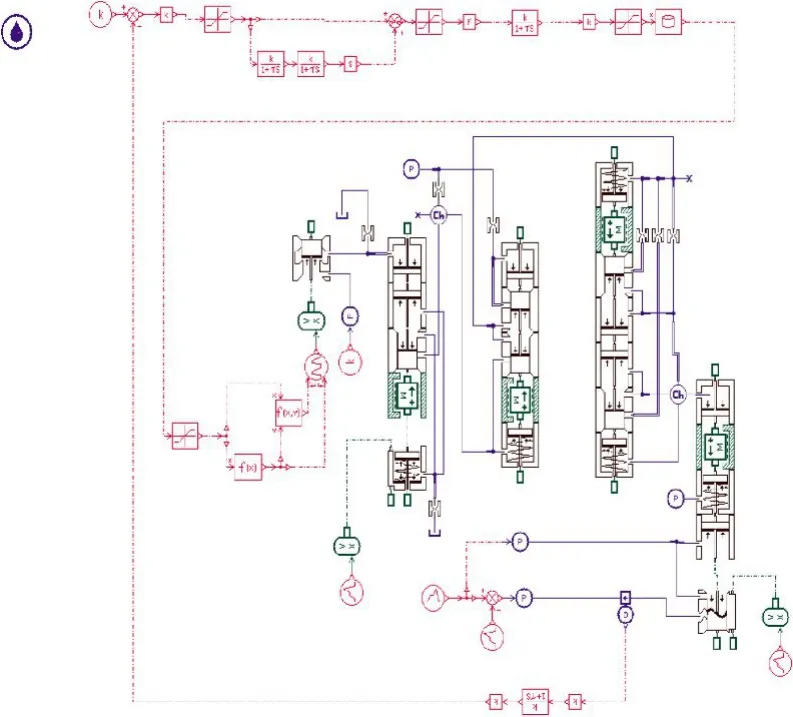
圖3 n1控制回路仿真模型
4 基于AMESIM的仿真分析
低壓轉子轉速n1程序電路中超前環節傳遞函數表達式為

式中:K為增益系數;T為時間常數;S為復數的自變量。
發動機的綜合電子調節器中K、T的計算公式為
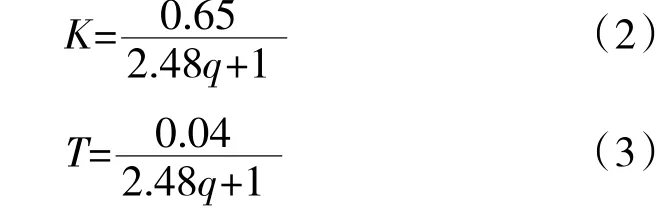
式中:q為占空比信號,由喘振壓差信號ΔPck插值得到。
原型發動機的綜合電子調節器中K、T為
全包線范圍內的喘振壓差信號的變化規律如圖4所示。
在高度為11 km、表速為300 km/h的飛行狀態點,喘振壓差信號ΔPck根據圖4插值,再分別將某型和原型綜合電子調節器中K、T系數代入仿真模型,運算轉速結果如圖5、6所示。從仿真分析過程及結果來看,修改n1超前環節,使超前環節比例系數為原型的狀態,可以解決某發動機高空小表速轉速擺動問題[16]。
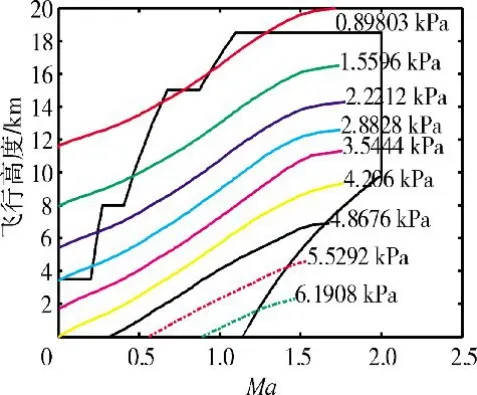
圖4 中間狀態喘振壓差信號全包線變化規律
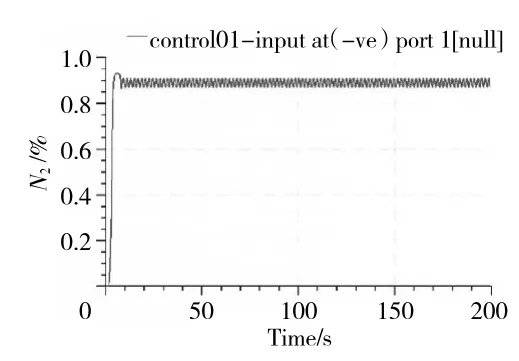
圖5 某型發動機n1轉速控制輸出仿真結果

圖6 原型發動機n1轉速控制輸出仿真結果
5 半物理試驗
在半物理試驗器上,對發動機進行n1控制回路的大閉環仿真試驗[17]。引出綜合電子調節器的k2的調整點,連接外部電阻箱,調整k2利用真實的發動機數學模型和完全真實的控制系統,進行高空左邊界驗證。
半物理模擬試驗成功復現發動機在高度為11 km,表速為300 km/h飛行狀態點處參數擺動現象,而引入原型狀態的超前環節比例系數后,擺動消除。試驗結果如圖7、8所示。
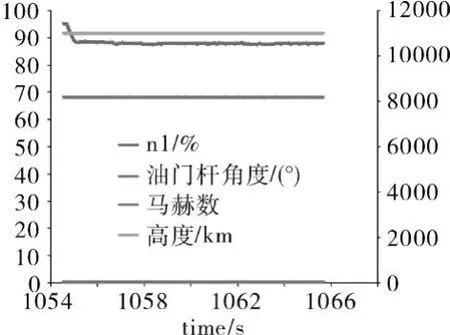
圖7 原型發動機半物理試驗n1擺動情況(擺幅為±0.2%)
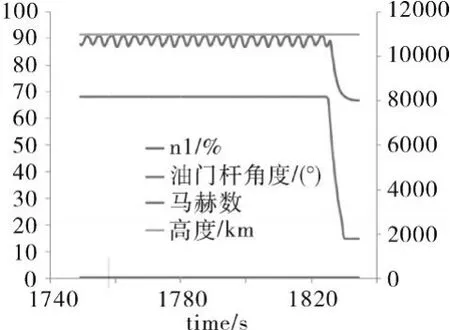
圖8 某型發動機半物理試驗n1擺動情況(擺幅為±2.2%)
6 改進措施及驗證
在保證發動機高空小表速飛行狀態穩定的同時兼顧發動機地面加速性,使用當前系統防喘聯鎖的高度信號,對n1超前環節進行分段控制,低空及地面保留當前超前環節比例系數,不影響發動機地面起動加速性;高空使用原型發動機超前環節比例系數,可提高發動機高空工作穩定性。
針對上述改進措施開展并通過如下驗證:
(1)地面加速性驗證。進行大油門特性、小油門特性、全程加速和半程加速等相關加速功能檢查,加速性能滿足發動機地面使用要求;
(2)高空臺模擬驗證。在轉速擺動工作點驗證改進措施有效性和控制率轉換的穩定性,試驗項目包括在高度為11 km、表速為300 km/h飛行狀態點加力通斷和穩定工作試驗、n1控制通道的放大系數轉換專項試驗,發動機均能穩定可靠地工作,無轉速擺動現象;
(3)試飛驗證。落實改進措施的發動機在高度為11 km、表速為300 km/h飛行狀態點,在訓練狀態和作戰狀態模式下,處于中間狀態和加力狀態時均工作正常,未出現參數擺動現象。
7 結束語
通過對比分析,以及數值仿真、半物理試驗、高空臺模擬、試飛驗證,采取“按高度分段控制n1超前環節比例系數”的改進措施,既保證了發動機高空小表速飛行狀態穩定性,同時兼顧了發動機地面加速性和發動機研制進度。首次采用的分段控制策略可在同類發動機或同類問題中進行借鑒和應用。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年2期)2014-02-27 12:10:15
汽車與新動力(2013年5期)2013-03-11 16:08:17
