淺談三維軟件與MATLAB聯合仿真在教學中的應用
2020-09-10 13:16:11馬杰
內燃機與配件 2020年11期
關鍵詞:教學
摘要:通過示例介紹了CAD軟件與MATLAB進行聯合建模及仿真分析的步驟,展示了聯合建模的直觀性和便利性,為以后機械課堂信息化教學組織提供方向。
關鍵詞:CAD;MATLAB;教學
0? 引言
機械原理、控制理論不管是在專科或是本科院校中,都是機械學科中一門重要的專業基礎課程。機械原理課程直接研究機構的結構、自由度、運動的一門課程;控制理論則是以具體的系統為研究對象,通過對研究對象模型進行設計計算,研究各種控制理論及控制算法的課程。
控制理論主要是研究不同控制算法的,而評判一種控制方法的好壞,主要是通過其系統控制效果的快速性、穩定性、魯棒性等特點。而系統的快速性、穩定性、抗干擾能力等,這些都是比較抽象的概念,不便于老師教學亦不便于學生理解接受。在教學過程中,若是能將這些抽象的概念具體化,以直觀的形式呈現出來,這樣老師講起來方便,更便于學生的理解。此外,智能化信息化的發展與推進,CAD與 CAE技術也快速發展,其中 CAE計算機輔助教學技術也正逐漸在高校中得以應用推廣[1-3]。
基于以上分析,在控制教學中引入仿真軟件,本文以Pro/E和MATLAB軟件為計算機輔助教學工具,利用三維軟件畫出簡單的機械結構,通過Pro/E與SimMechanics接口插件,將模型信息導入MATLAB中,通過加入不同的控制算法,可通過三維動畫顯示,將系統的快速性、穩定性、抗干擾能力等直觀的展現。
1? 研究對象建模
SimMechanics 是MATLAB中一種新的可以實現物理建模的模塊,其組合建模框架可以實現對繁雜機械系統的設計、分析與優化。SimMechanics 工具箱內嵌模塊有多種能夠在Simulink仿真環境下直接選取使用的單元,在SimMechanics 工具箱中進行模塊的選取與搭建,可以直接在Simulink窗口中搭建研究對象模型。為了加入控制模塊進行仿真,還需加入連接紐帶:檢測與驅動模塊,用以將SimMechanics 中組建的研究對象物理模型和普通的Simulink 仿真模塊進行關聯。 此外,Simulink自身的動態仿真性能,在得到系統整體仿真結果的同時,可實時呈現仿真過程的動畫圖形。在SimMechanics 模塊中搭建系統模型簡單方便,通過模塊拖拽進行搭接,便可快速得到系統模型,進行各種機械系統的運動仿真分析,并且將仿真結果實時動態展現[4]。
1.1 三維模型
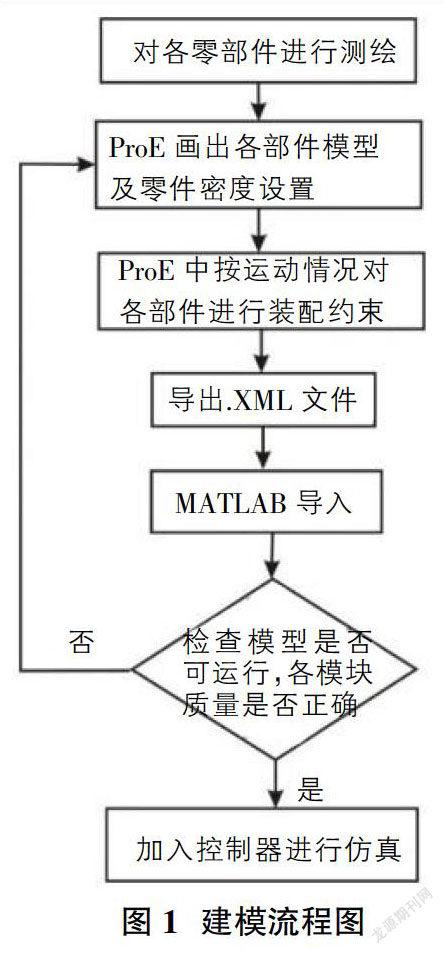
首先利用三維軟件的繪圖功能,畫出研究對象各部件模型,按照運動特性進行約束裝配,建立研究對象的物理模型。在CAD中完成三維模型繪制后,通過CAD中預先安裝的SimMechanics Link接口插件,將模型信息以.XML 文件形式導出保存,接著打開MATLAB 軟件,在MATLAB中導入這個.XML 模型文件。可以看到,MATLAB中根據之前的.XML 文件自動生成了所繪研究對象的SimMechanics仿真模型框圖,對自動生成的模型進行運行,檢查模型是否存在錯誤,各模塊質量、位置是否準確,其流程如圖1所示。
1.2 MATLAB仿真模型
此處與傳統的數學推倒計算建模方式不同,MATLAB作為一種全新的建模方式,可以快速地對各種機械系統進行建模,面對復雜、數學計算量大的系統,更能體現通過SimMechanics建模的便利性。SimMechanics工具箱本身提供了一系列快速建模模塊,通過拖拽工具箱中的模塊,進行參數設置,可以快速將系統中各零件及其連接關系在Simulink窗口中表示出來,并通過SimMechanics工具箱中的檢測與驅動模塊完成與普通Simulink各模塊的聯接,搭建形成一個完整的系統模型。
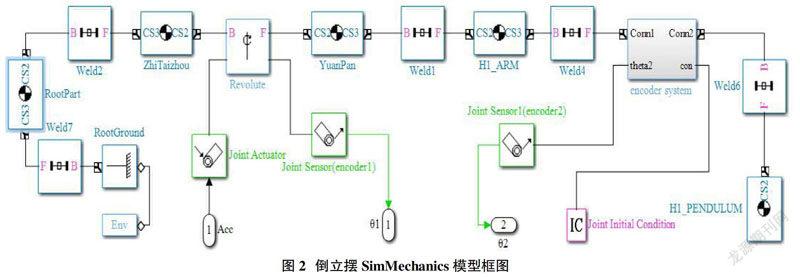
在MATLAB工作窗口中輸入指令,找到前面保存的.XML倒立擺模型文件,導入Simulink中直接生成研究對象初始仿真模型,如圖2中藍色邊框模塊所示。此時導入的模型只是物理機械模型,還需加入控制器與Simulink環境中各模塊進行關聯控制,如:測試、檢測、驅動等模塊,形成完整的控制仿真系統。如圖2中的綠色邊框單元,以便完成控制仿真設計。圖2中紫色模塊用來進行系統模型初始值的設置。
2? 仿真
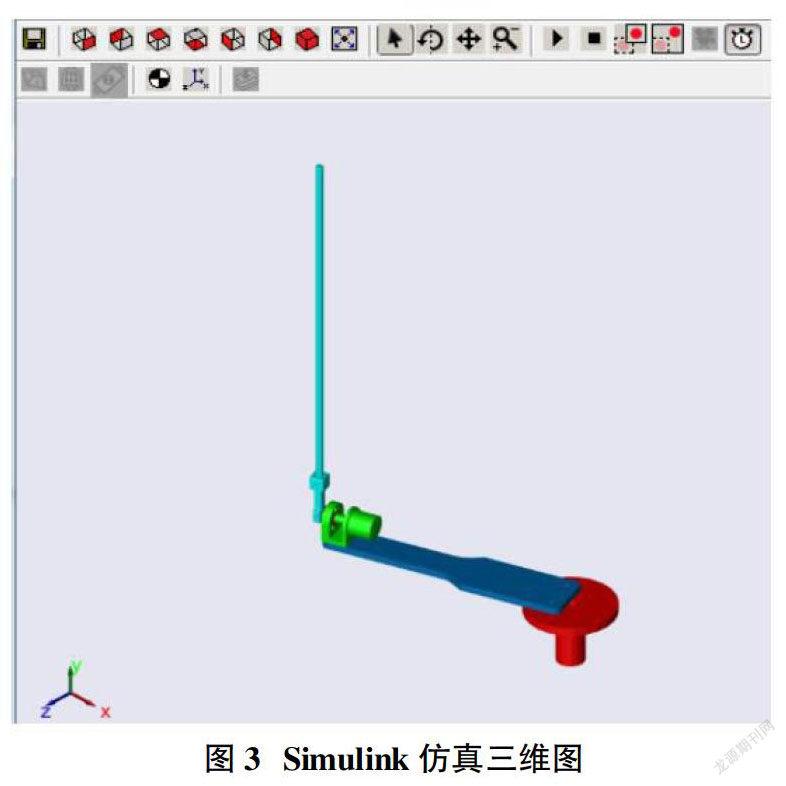
加載到Matlab中的SimMechanics物理模型就相當于實際的研究對象,在Simulink窗口中進行仿真時,系統將自動進行數據轉換,進行反饋計算控制。仿真過程通過加入編碼器、驅動模塊等進行交互。Simulink界面中點擊運行后,軟件界面會自動彈出三維模型實時仿真圖,如圖3,與用CAD繪制的模型完全一致,更加立體、直觀地顯示出仿真過程,包括系統穩定性、快速性等。
3? 結束語
通過三維軟件與仿真軟件聯合建模仿真,在實際工程中大大簡短了工作時間和工作量。將其運用于教學中,符合信息化教學的要求,改變傳統文字理論教學的形式,豐富課堂環節,并且將抽象、復雜的知識點,通過三維動畫直觀呈現,既調動了學生的積極性、提高學生學習興趣及課堂教學質量,使學生更好理解掌握理論知識,亦培養學生通過學習多種軟件解決問題的能力。
參考文獻:
[1]陳慧鵬,陳國金.《機械原理》教學中Pro/E與Simmechanics的應用[J].長江大學學報(自科版),2013,10(22):135-137.
[2]余冬玲,熊家凱,袁明.ADAMS在機械原理實踐教學中的應用[J].科教文匯(上旬刊),2018(10):57-58.
[3]李俏,伍先明,王鵬程,黃永程.Adams在機械原理課程教學中的應用研究[J].機械管理開發,2018,33(11):55-56,165.
[4]張新榮,馬杰,張才斗,等.基于MATLAB倒立擺可視化建模仿真與控制[J].計算機工程與設計,2018,39(10):3214-3219.
猜你喜歡
甘肅教育(2020年14期)2020-09-11 07:57:50
作文成功之路·小學版(2020年7期)2020-08-24 08:20:14
作文成功之路·小學版(2020年6期)2020-07-27 01:48:22
甘肅教育(2020年12期)2020-04-13 06:25:34
頌雅風·藝術月刊(2019年11期)2019-03-15 09:23:46
東方教育(2017年19期)2017-12-05 15:14:48
唐山文學(2016年2期)2017-01-15 14:03:59
中國音樂教育(2016年2期)2016-05-20 10:11:10
中學語文(2015年6期)2015-03-01 03:51:42
中國教育技術裝備(2015年6期)2015-03-01 02:36:31