
車輛盲區監測系統測試評價方法研究
2020-10-21 04:14:03何佳李長娟郭蓬林強唐風敏
汽車實用技術 2020年12期
關鍵詞:評價體系
何佳 李長娟 郭蓬 林強 唐風敏

摘 要:隨著汽車車載ADAS系統越來越普及,如何有效評價ADAS系統的性能和確定使用條件邊界條件成為重點。車輛盲區監測系統作為重要的輔助駕駛員安全預警系統,針對如何有效評價一套車輛盲區監測系統、以及使用何種指標、關鍵參數進行評價,提出使用虛擬仿真測試與實車測試相結合的辦法,并提出百公里誤報率、漏報率評價指標和不同駕駛員駕駛體驗評價體系,綜合評價盲區監測系統的性能,從而為改進盲區監測系統提供指導。
關鍵詞:盲區監測系統;評價體系;關鍵參數
Abstract: With the increasing popularity of ADAS system, how to effectively evaluate the performance of ADAS system and determine the boundary conditions of service conditions become the focus. As an important assistant driver safety early warning system, the vehicle blind area monitoring system proposes the method of combining virtual simulation test with real vehicle test for how to effectively evaluate a set of vehicle blind area monitoring system, which indicators and key parameters to use, and proposes the evaluation indicators of 100 km false alarm rate, missing alarm rate and different driver driving experience evaluation systems, Comprehensive evaluation of the performance of the blind area monitoring system, so as to provide guidance for improving the blind area monitoring system.
Keywords: Blind area monitoring system; Evaluation system; Key parameters
1 盲區監測系統法規
2019年7月29日,工信部對3項汽車行業推薦性國家標準進行公示,包括先進輔助駕駛系統ADAS、道路車輛盲區監測BSD和乘用車車道保持輔助LKA,《道路車輛盲區監視系統(BSD)性能要求及試驗方法》中規定汽車盲區監測(BSD)系統的一般要求、性能要求和試驗方法[1-3]。在進行實車測試時,目標車輛和試驗車輛相互關系如圖1、2所示,圖1中車輛編號1為試驗汽車,標號2為目標車輛,標號3為試驗車輛1車身最外緣(近目標車輛側,不包括外后視鏡)與目標車輛車身最外緣(近試驗車輛側,不包括外后視鏡)之間的橫向距離。
圖2中標號3為試驗車輛前部位于第九十五百分位眼橢圓的中心與目標車輛最前端之間的縱向距離。
2 盲區監測系統測試系統搭建
盲區監測系統測試分為虛擬仿真測試與實車測試,虛擬仿真測試在盲區駕監測開發早期的設計、開發和評估階段,通過建立一套逼近實際駕駛場景的仿真環境,能夠有效降低開發驗證時間和把控風險,盲區監測系統開發流程如圖3所示,分為搭建虛擬仿真場景、搭建實車場景、配置參數、控制策略驗證、數據分析、問題分析、修改控制策略和參數等階段[4-5]。
搭建虛擬仿真場景常用到Prescan仿真引擎,Prescan仿真引擎提供各種模型以實現環境模型的搭建,提供的模型包括車道、車輛、行人軌跡及位置等。在搭建虛擬仿真場景時,按照實車傳感器安裝參數設置虛擬場景中角毫米波雷達傳感器的安裝參數,根據實車測試需求進行高逼真的仿真場景渲染。Prescan仿真引擎與Matlab/SIMULINK完美耦合,可通過Simulink平臺完成ADAS控制策略開發,仿真架構如圖3所示。最后通過prescan和matlab/SIMULINK的耦合仿真來完成數據可視化,仿真數據可視化,駕駛環境可視化等操作。
為實現車輛盲區監測系統全方位測試,測試需考慮道路交通狀況、道路類型以及天氣等因素對系統性能的影響。如圖5所示,在生成測試環境時,從天氣種類、道路類型、道路交通情況中隨機選取一種,排列組合成一種典型的盲區監測系統測試場景[6]。
對測試車輛盲區監測系統性能進行測試時,需要對測試車輛的行駛軌跡、行駛速度、駛行加速度以及在某一時間段的駕駛行為進行規定和設置,同時,需要確定目標車輛(駛入盲區的車輛)數量,目標車輛的行駛軌跡、速度、加速度以及在某一時間單元上的行駛行為進行規定和設置。
3 測試數據保存與分析
為實現對盲區監測系統的快速驗證和試驗結果分析,開發如圖5所示的車輛盲區監測系統測試軟件,軟件能夠實時的記錄車輛的周圍環境視頻信息,以及角毫米波雷達數據信息和車輛重要參數信息,同時實現對不同頻率的數據源進行時間同步,在數據分析時可對采集的數據進行回放,以便分析觀察試驗結果。同時,為保證虛擬仿真測試能夠使用如圖5所示的數據采集與分析軟件的功能,開發Matlab/simulink與數據采集與分析軟件數據交互API接口,將虛擬仿真引擎的毫米波雷達數據和車輛參數輸送給分析軟件,以便快速的進行仿真分析。
測試車輛需要在車輛的前后左右各安裝一個圖像采集攝像頭,同時,為定位測試場景位置信息,需要加裝一套全球定位系統,要求定位系統的定位精度在20cm以內,車輛周圍的圖像實時在如圖6所示的軟件上顯示,同時,將測試車輛的速度、方向盤轉角等信息進行實時顯示。
為測試車輛盲區監測系統性能,將測試試驗分為兩類:標準法規測試和公開道路測試。標準法規測試主要測試車輛盲區監測系統是否滿足法規的要求,在規范層面上判斷車輛盲區監測系統是否滿足法規的標準。公開道路測試主要體現車輛盲區監測系統的可靠性,從而從用戶的層面考慮車輛盲區監測系統對駕駛員的影響,以及駕駛員對盲區監測系統的信任度。
3.1 標準法規測試
在進行標準法規測試時,根據《道路車輛盲區監視系統(BSD)性能要求及試驗方法》法規要求,設計測試場景,統計測試數據。目標車輛分為摩托車和普通車輛,主要涉及的控制參數有試驗車輛的行駛速度,目標車輛駛行速度,目標車輛與試驗車輛之間的橫向距離,目標車輛的側向速度,目標車輛與試驗車輛之間的縱向距離。
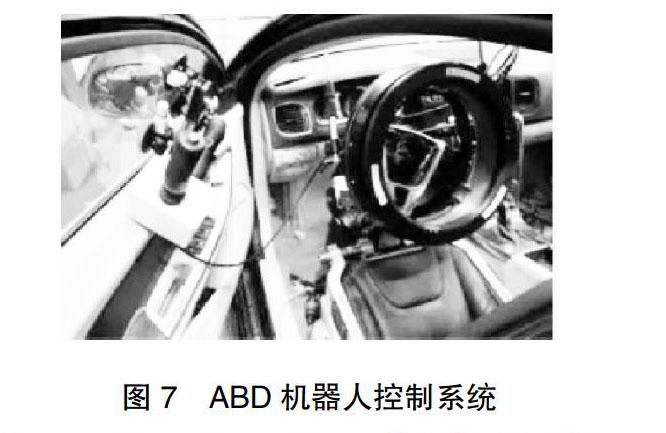
為實現對測試車輛和測試車輛的參數控制,需要在目標車輛上加裝一套高精度的GPS全球定位系統和如圖7所示的ABD機器人控制系統。
目標車輛與試驗車輛兩者之間的數據交互使用大功率電臺實現,將試驗車輛的GPS定位信息和車速信息傳輸給目標車輛系統,從而計算目標車輛與試驗車輛之間的距離,以此改變目標車輛的控制行為。
同時將目標車輛的關鍵車速和位置等信息反向傳輸給試驗車輛,通過圖5所示的數據采集與分析軟件進行數據保存,從而有效的數據進行分析。
3.2 公開道路測試
公開道路測試指試驗車輛進行城市、高速、鄉村等場景測試,統計不同駕駛員駕駛車輛時對盲區監測系統性能的評價分數,以及統計盲區監測系統的報警數據和應報警而為報警數據。為實現系統評價,系統設計典型的盲區監測系統測試的性能指標,用來統計、分析和對比盲區監測系統的性能,主要分析測試的性能指標如下:
k1為100公里虛警率,k2為100公里漏報率,d1為汽車每行駛100公里盲區監測系統的虛警次數,d2為汽車每行駛100公里盲區監測系統的報警次數,d3為汽車每行駛100公里盲區監測系統的漏報次數,k3為100公里虛警率與漏報率之間的比值。
不同駕駛員對盲區監測系統性能進行評價時,其評價分數表如表1所示,評價分為4個等級,評價結果小于6分為
對所有駕駛員的評價分數進行統計,最終的評價分數如式4進行計算:
式中pi為第i個駕駛員對盲區監測系統的評價分數,n為駕駛員人數,從而得到盲區監測系統駕駛員綜合評價分數。
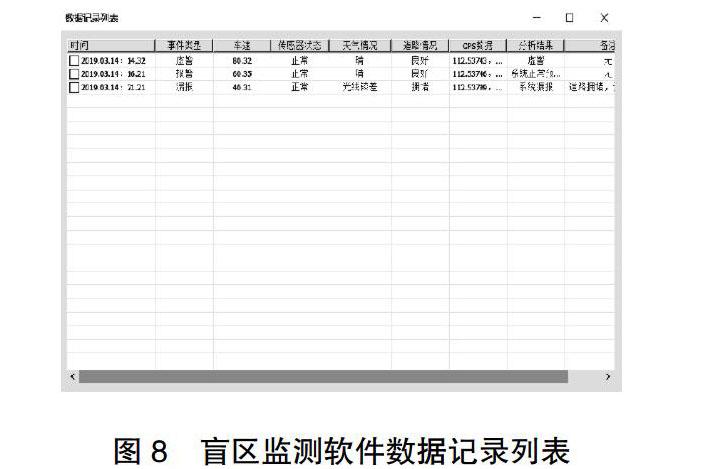
車輛盲區監測系統測試軟件將每次的預警、漏報、誤報事件都進行記錄,記錄列表如圖8所示,記錄數據包括時間、GPS數據等關鍵數據,以便進行數據分析。
4 結論
通過盲區監測系統法規和測試事項的理解,搭建虛擬測試和實車測試場景,開發用于測試分析的車輛盲區監測系統測試軟件,能夠有效的加快測試進度,保證大規模的實車測試,有效的降低了人員開銷,保證盲區監測系統測試進度。同時,通過標準法規測試和公開道路測試以及不同駕駛員對盲區監測系統進行評價,從而得到盲區監測系統的性能指標,方向引導盲區監測系統的開發。
參考文獻
[1] 李華俊.盲區監測變道輔助系統標定方法的研究[J].汽車電器, 2017(09):7-11.
[2] 張正軒.重卡駕駛員視野盲區監控系統研究[D].長安大學,2017.
[3] 邢春鴻.盲區監測系統公開道路測試方法研究[C].2018中國汽車工程學會年會論文集.北京:機械工業出版社,2018:262-265.
[4] 李藝.盲區監測系統的場地測試評價方法研究[C].2018中國汽車工程學會年會論文集.北京:機械工業出版社,2018:146-151.
[5] 劉保祥.基于毫米波雷達的汽車盲區監測系統研究[J].北京汽車,2019(05):21-23+34.
[6] 孫會明.基于毫米波雷達的汽車開門防撞預警關鍵技術研究[D].揚州大學,2018.
猜你喜歡
科教導刊(2016年27期)2016-11-15 21:47:19
知音勵志·社科版(2016年9期)2016-11-09 05:41:07
科技視界(2016年18期)2016-11-03 21:50:03
時代金融(2016年23期)2016-10-31 13:39:21
職業(2016年10期)2016-10-20 22:00:12
課程教育研究·學法教法研究(2016年21期)2016-10-20 20:24:30
商業會計(2016年13期)2016-10-20 15:32:16
科技視界(2016年20期)2016-09-29 14:08:22
科技視界(2016年20期)2016-09-29 11:31:29
企業導報(2016年8期)2016-05-31 19:25:36
