變勢能阱雙穩(wěn)態(tài)氣動彈性能量收集的性能增強研究
2020-12-02 08:33:06李魁楊智春谷迎松周生喜
航空學(xué)報 2020年9期
李魁,楊智春,谷迎松,周生喜
西北工業(yè)大學(xué) 航空學(xué)院,西安 710072
近十年來,利用風(fēng)致振動的能量收集技術(shù),為微型無人飛行器或低功耗無線傳感器網(wǎng)絡(luò)供電,受到了國內(nèi)外學(xué)者的關(guān)注[1-6],具有巨大的工程應(yīng)用前景。Erturk等利用顫振機理設(shè)計的能量收集器[7],在風(fēng)速為9.3 m/s時發(fā)生極限環(huán)振動(Limit Cycle Oscillations, LCOs),向負載電路輸出電功率達到10.7 mW。Abdelkefi和Ghommem對撲翼飛行器的能量收集進行了數(shù)值研究,輸出電功率超過50 mW,能夠滿足機載攝像鏡頭的供電需求[8]。Bryant和Garcia將二元翼段鉸接在壓電梁上,設(shè)計了微型低風(fēng)速顫振能量收集器[9],顫振始發(fā)風(fēng)速僅為1.9 m/s,在2~9 m/s的風(fēng)速區(qū)間收集到的電功率達到0.85~2.2 mW。Xiang等研究了壓電機翼在突風(fēng)載荷作用下的能量收集性能,數(shù)值分析了壓電片的位置、厚度、機翼剛性軸位置等參數(shù)對輸出電功率的影響[10]。在已有的這些研究中,雖然不同形式的氣動彈性能量收集器被提出,但普遍基于線性氣動彈性理論來設(shè)計,這使得根據(jù)特定工作風(fēng)速設(shè)計的能量收集器,當環(huán)境風(fēng)速發(fā)生改變或結(jié)構(gòu)存在不確定性時,系統(tǒng)難以持續(xù)工作在最佳的能量收集狀態(tài)。
為解決上述問題,近年來,逐漸有學(xué)者借鑒振動能量收集中采用的非線性技術(shù)[11-13],來提升氣動彈性能量收集系統(tǒng)的工作性能。Li等設(shè)計了一種磁力作用下的單穩(wěn)態(tài)顫振能量收集器[14],能夠降低系統(tǒng)的顫振始發(fā)風(fēng)速,在研究的風(fēng)速范圍內(nèi),能量收集性能提升了一倍。Alhadidi等[15]利用磁力產(chǎn)生雙穩(wěn)態(tài),進行了尾渦馳振的雙穩(wěn)態(tài)能量收集研究,拓寬了結(jié)構(gòu)對尾渦頻率的響應(yīng)帶寬,從而降低能量收集器對風(fēng)速變化的敏感度。Zhang等實驗驗證了磁力雙穩(wěn)態(tài)對渦激振動能量收集器輸出電功率的增強作用[16],然而雙穩(wěn)態(tài)同時引起了系統(tǒng)工作風(fēng)速的提高,作者對此沒有進行深入的研究。Zhou等研究了帶有末端分叉的壓電梁在氣流擾動下的雙穩(wěn)態(tài)能量收集[17],發(fā)現(xiàn)在不同的風(fēng)速下,磁力雙穩(wěn)態(tài)可能激發(fā)能量收集器在勢阱間(inter-well)躍遷,也可能將系統(tǒng)束縛在其中一個勢阱內(nèi)(intra-well),從而對能量收集性能造成截然相反的影響。總的來看,與振動能量收集相比,非線性氣動彈性能量收集的研究仍處于起步階段,存在著一定的研究空白,非線性多穩(wěn)態(tài)的影響機制缺乏深入的探索,并需要對多穩(wěn)態(tài)帶來的弊端提出改進措施。
本文設(shè)計了一類新型的磁耦合雙穩(wěn)態(tài)顫振能量收集器(Bi-stable Flutter Energy Harvester, BFEH),對雙穩(wěn)態(tài)的影響機理以及存在的問題進行了探討,從而提出變勢能阱雙穩(wěn)態(tài)的改進策略(Variable-potential-well Bi-stable Flutter Energy Harvester, VBFEH)。建立了磁耦合氣動彈性能量收集系統(tǒng)的動力學(xué)控制方程,利用非線性磁偶極模型和平衡點穩(wěn)定性理論,對出現(xiàn)雙穩(wěn)態(tài)構(gòu)型的磁力參數(shù)范圍進行了求解,研究了雙穩(wěn)態(tài)構(gòu)型對系統(tǒng)的顫振特性以及輸出電功率的影響規(guī)律。本文提出的VBFEH通過彈性支撐下外部磁鐵的運動來自適應(yīng)調(diào)節(jié)系統(tǒng)的勢能阱,激發(fā)雙穩(wěn)態(tài)勢阱間運動,達到了同時拓寬能量收集器工作風(fēng)速范圍和提升輸出電功率的目的,并解釋了變勢能阱技術(shù)對顫振能量收集性能的增強機理,進一步提高了系統(tǒng)對風(fēng)場環(huán)境的適應(yīng)性。
1 VBFEH的組成及工作原理
圖1為本文提出的變勢能阱雙穩(wěn)態(tài)顫振能量收集器的結(jié)構(gòu)示意圖,其主要由2根在根部粘貼有壓電片的懸臂梁和在梁梢部通過剛性軸鉸接的二元翼段構(gòu)成。圖中,U∞為來流風(fēng)速;u(t)為外部磁鐵的位移;α(t)為二元翼段的俯仰位移;RL為負載電阻;h(t)為沉浮模態(tài)位移;V+和V-分別為電壓片上、下表面電極上的電勢。與傳統(tǒng)的單穩(wěn)態(tài)顫振能量收集器[7, 9]不同,本文提出的VBFEH在懸臂梁的梢部帶有永磁鐵,外部磁極方向相反的永磁鐵安裝在支撐彈簧上,通過內(nèi)外部磁鐵的磁場作用,對顫振能量收集器施加非線性磁力。根據(jù)文獻[18]可知,當內(nèi)外部磁鐵間距D小于臨界值時,排斥性磁力將抵抗懸臂梁的彈性恢復(fù)力,使能量收集器發(fā)生靜態(tài)失穩(wěn),出現(xiàn)雙穩(wěn)態(tài)構(gòu)型,如圖2所示,w(x,t)為梁的橫向振動位移;ke為外部磁鐵支撐彈簧剛度。
在雙穩(wěn)態(tài)構(gòu)型下,原始的零平衡點變得不穩(wěn)定,而在兩側(cè)對稱位置出現(xiàn)新的穩(wěn)定平衡點,發(fā)生顫振后,能量收集器將圍繞2個新的平衡位置,發(fā)生勢能阱間的大幅值躍遷運動。外部磁鐵在彈性支撐下的運動將實時改變與內(nèi)部磁鐵之間的相對位置,起到調(diào)節(jié)雙穩(wěn)態(tài)系統(tǒng)勢能阱深度的作用[19],從而實現(xiàn)可變勢能阱的雙穩(wěn)態(tài)顫振能量收集。顯然,磁耦合雙穩(wěn)態(tài)、變勢能阱雙穩(wěn)態(tài)的顫振能量收集特性,將不同于傳統(tǒng)的顫振能量收集系統(tǒng)。本文重點研究了磁鐵的間距、磁偶極矩以及外部磁鐵的彈性運動對顫振能量收集系統(tǒng)工作風(fēng)速范圍、輸出電功率的影響規(guī)律,旨在增強顫振能量收集性能、提高系統(tǒng)對風(fēng)場環(huán)境的適應(yīng)性。
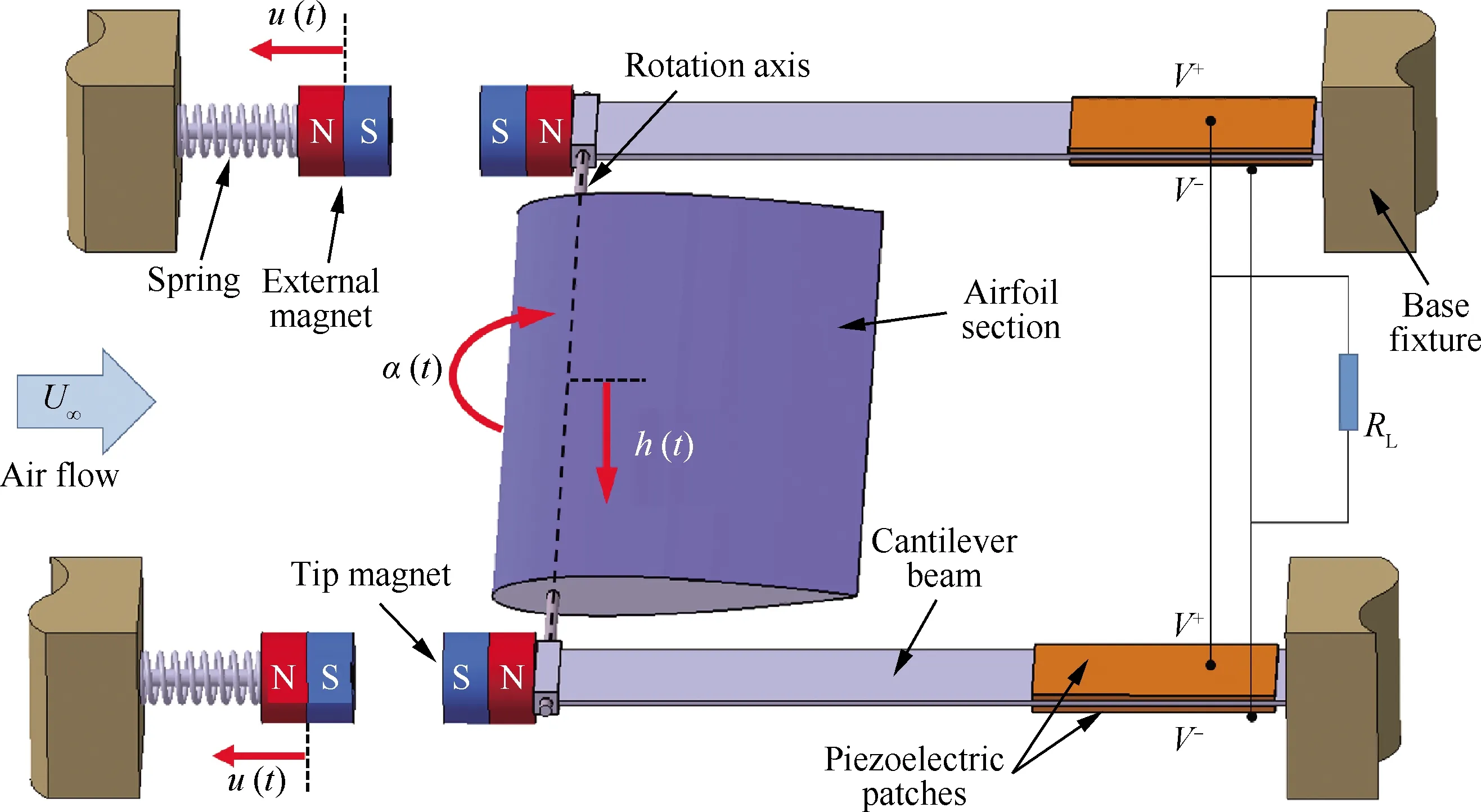
圖1 變勢能阱雙穩(wěn)態(tài)顫振能量收集器結(jié)構(gòu)示意圖Fig.1 Schematic of proposed VBFEH
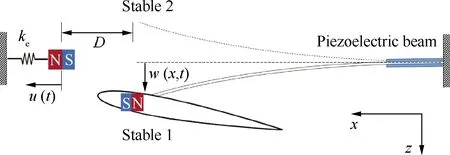
圖2 顫振能量收集系統(tǒng)的雙穩(wěn)態(tài)構(gòu)型Fig.2 Bi-stable configuration of flutter energy harvesting system
2 磁力-壓電-氣動彈性耦合系統(tǒng)建模
本文提出的VBFEH的力學(xué)分析模型可等效為圖2所示,壓電換能電路與氣動彈性系統(tǒng)的沉浮自由度發(fā)生耦合。為了研究顫振能量收集器的動態(tài)特性,本節(jié)將根據(jù)Euler-Bernoulli梁的彎曲大變形理論,通過Hamilton變分原理、壓電本構(gòu)方程以及Kirchhoff電學(xué)基本定律,建立雙穩(wěn)態(tài)顫振壓電能量收集系統(tǒng)的磁力-壓電-氣動彈性耦合的動力學(xué)控制方程。
2.1 理論模型
本文對帶動二元翼段沉浮運動的2根壓電梁采用Euler-Bernoulli梁理論進行建模,記壓電梁的橫向振動位移為w(x,t),考慮梁在顫振運動中彎曲大變形引起的非線性剛度,根據(jù)幾何非線性關(guān)系[14]可得梁橫截面上任意一點的應(yīng)變?yōu)?/p>
(1)
式中:S1為梁的彎曲應(yīng)變;z為梁截面上的點到中性軸的距離。梁根部粘貼的壓電片伴隨梁發(fā)生彎曲變形,其彎曲本構(gòu)方程為
(2)

(3)
式中:Vp、Vb代表壓電片和懸臂梁的積分體積;Eb為梁的彈性模量。第1項為壓電片的彈性應(yīng)變勢能,第2項代表壓電片機電耦合勢能,第3項為懸臂梁的彈性應(yīng)變勢能。壓電片儲存的內(nèi)部電能[3]為
(4)
考慮二元翼段的沉浮運動、繞剛性軸的俯仰運動,以及2根壓電梁的振動,系統(tǒng)的總動能表達式為

(5)
式中:ρp和ρb分布為壓電片和梁的密度;mF為二元翼段的質(zhì)量;b為翼段的半弦長;xα為重心在剛性軸后的無量綱距離;Iα為繞剛性軸的質(zhì)量慣性矩;mM為梁梢部磁鐵的質(zhì)量;δ(x)為狄拉克函數(shù)。
顫振能量收集器通過壓電效應(yīng)向負載電路輸送電能,負載電路的電阻記為RL。每根懸臂梁兩側(cè)粘貼的壓電片首先經(jīng)過串聯(lián)連接,然后將2根壓電梁的電極并聯(lián),將輸出電壓施加在負載2端,如圖1所示。系統(tǒng)受到的外界非保守力做功包括氣動載荷對二元翼段做功Wa、外部磁場對梁梢部磁鐵做功Wm以及壓電片向負載電路輸出的電能We,分別寫作:
Wa=-QLwδ(x-Lb)+QMα
(6)
Wm=Fmwδ(x-Lb)
(7)
We=QV
(8)
式中:氣動載荷的作用點在剛性軸位置,QL和QM表示氣動升力和氣動力矩,氣動升力的方向向上為正,氣動力矩使翼段抬頭為正方向;Fm為梁梢部磁鐵受到的磁力;Q為通過負載電路的總電荷。根據(jù)廣義Hamilton變分原理[9]:

(9)
將式(3)~式(8)代入式(9),首先經(jīng)過體積積分,再分別對廣義自由度w、α和V進行變分運算,可以得到系統(tǒng)的動力學(xué)控制方程:
YI(w?′+w″3+4w′w″w?+w′2w?′)+
(zme31bpδ(x-Lp))′V=(-QL+Fm)·
δ(x-Lb)
(10)
(11)
(12)
能量收集系統(tǒng)的等效接口電路[20]可以表示為圖3所示的電路圖,記每個壓電片輸出的總電流為ip(t),壓電片等效電容為Cp,等效電容兩端通過的電流為ic(t)。負載電阻的電壓、電流分別為V(t)、iL(t)。根據(jù)電路Kirchhoff定律可得:
(13)
(14)
聯(lián)立式(13)和式(14)可得系統(tǒng)的等效電路方程:
(15)
利用Hamilton原理和Kirchhoff定律得到的電學(xué)控制方程等價,對比式(12)和式(15)可知:
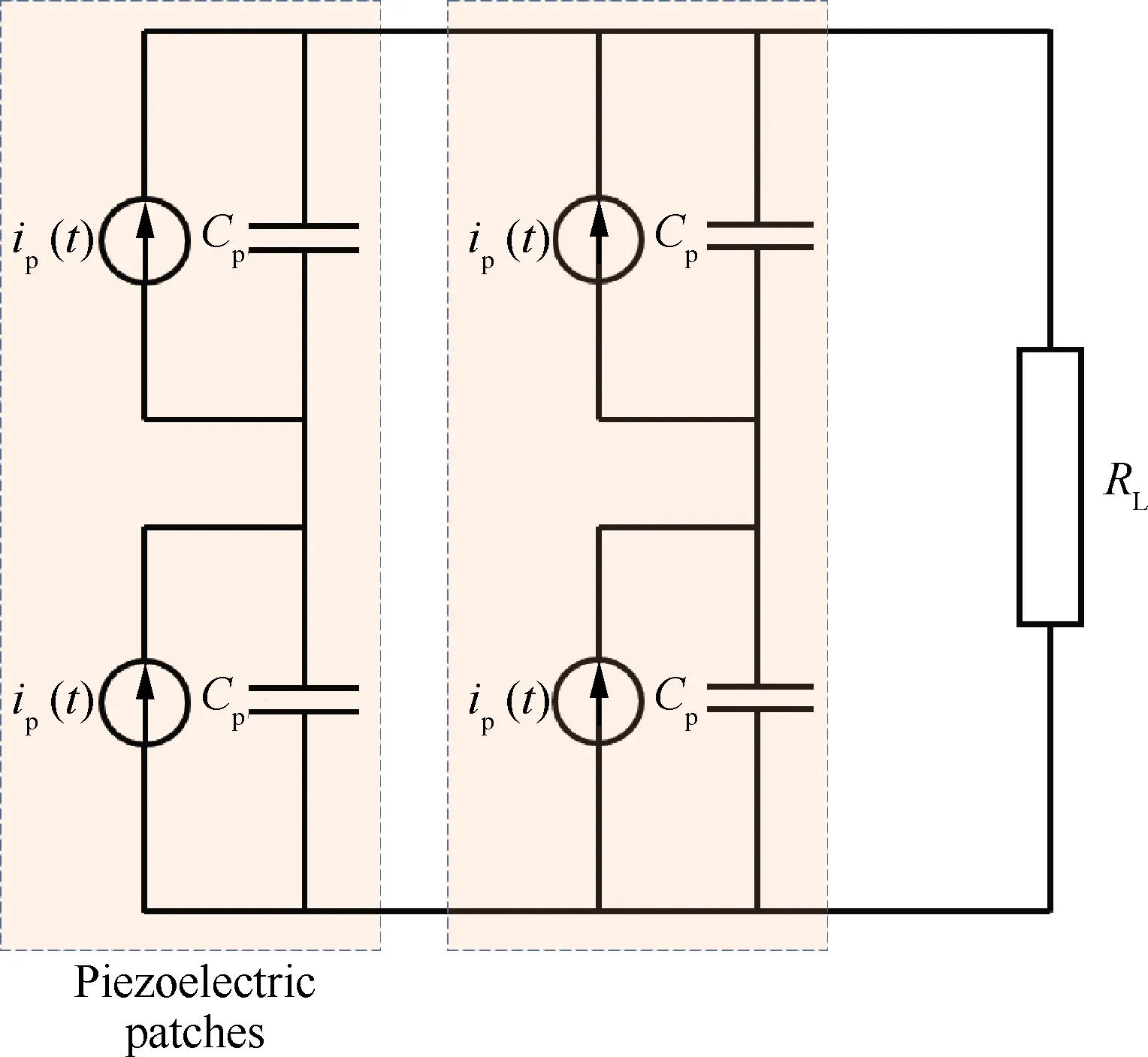
圖3 能量收集系統(tǒng)的等效電路圖Fig.3 Equivalent circuit of VBFEH
(16)
(17)

θV=-QL+Fm
(18)
(19)
(20)

2.2 氣動力模型
在顫振能量收集器的動力學(xué)控制方程中,氣動力模型采用Theodorsen非定常氣動力的Wagner函數(shù)近似表達式,用來描述顫振能量收集器所受到的時域氣動載荷。當風(fēng)速為U時,二元翼段在任意運動形式下所受的氣動升力、氣動力矩可以表示為
2πρUbsQ3/4(t)(1-A1-A2)+
2πρU2bs[A1b1w1(t)+A2b2w2(t)]
(21)
[A1b1w1(t)+A2b2w2(t)]
(22)

(23)
其中:b1和b2為Wagner函數(shù)中的常數(shù),有b1=0.045 5,b2=0.30。
2.3 磁力建模與系統(tǒng)的雙穩(wěn)態(tài)構(gòu)型分析
本文采用磁偶極理論對非線性磁力進行建模,來計算壓電梁梢部磁鐵以及外部磁鐵受到的磁力,Dipole-dipole磁偶極模型為[21]:
[(r×mA)×mB+(r×mB)×mA-
2r(mA·mB)+5r(r×mA)·(r×mB)]
(24)

(25)
Fme(h,u,D)=
(26)
彈性支撐的外部磁鐵可以簡化為一個單自由度振子,記質(zhì)量、阻尼、剛度分別為me、ce、ke,運動方程如下:
(27)
從式(25)和式(26)可以看出,顫振能量收集器和外部磁鐵之間通過磁力發(fā)生相互作用,它們受到的磁力均與二者的相對運動有關(guān)。
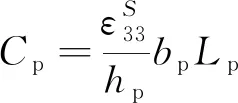
當外部磁鐵固定時(u=0),在系統(tǒng)的沉浮運動過程中,磁力的變化曲線如圖4所示。從圖中可以看出,能量收集器受到的磁力在零點處為零,在兩側(cè)達到最大值后隨距離增大而逐漸減小;外部磁鐵的磁力在零點處最大,兩側(cè)逐漸減小。隨著沉浮位移繼續(xù)增大,內(nèi)外磁鐵部彼此遠離,二者所受的磁力最終衰減至零,磁力與沉浮位移之間呈現(xiàn)強非線性關(guān)系。如圖中所示,當2個磁鐵的間距D減小時,磁力逐漸增強,磁力曲線與能量收集器的彈性恢復(fù)力曲線可以出現(xiàn)3個交點,且零點兩側(cè)的交點逐漸偏離零點。
由動力學(xué)控制方程式(18)可知,能量收集器的雙穩(wěn)態(tài)構(gòu)型體現(xiàn)在沉浮自由度上。令能量收集器的速度和加速度分別為零,可以得到系統(tǒng)的平衡點應(yīng)滿足方程:
Kh1h+Kh3h3=Fm(h,D)
(28)
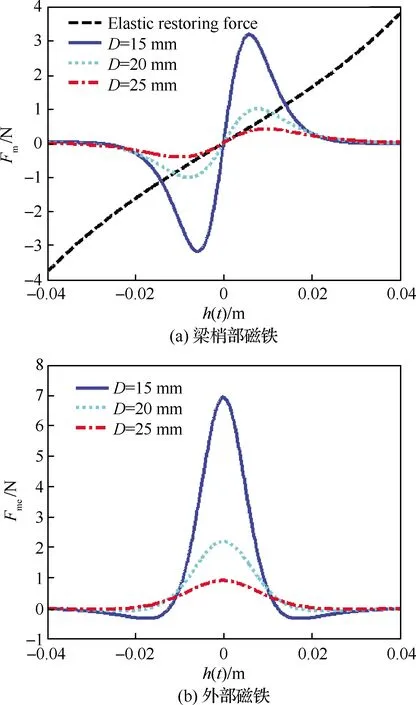
圖4 內(nèi)外部磁鐵的磁力與沉浮位移的關(guān)系Fig.4 Relationship between magnetic force and plunging displacement of harvester
聯(lián)立求解代數(shù)超越方程式(25)和式(28),可得顫振能量收集器的平衡點,對應(yīng)圖4(a)中磁力曲線與彈性恢復(fù)力曲線交點的橫坐標值。當磁鐵間距較大時,磁力相對微弱,式(28)只有零解,能量收集器保持單穩(wěn)態(tài)構(gòu)型。
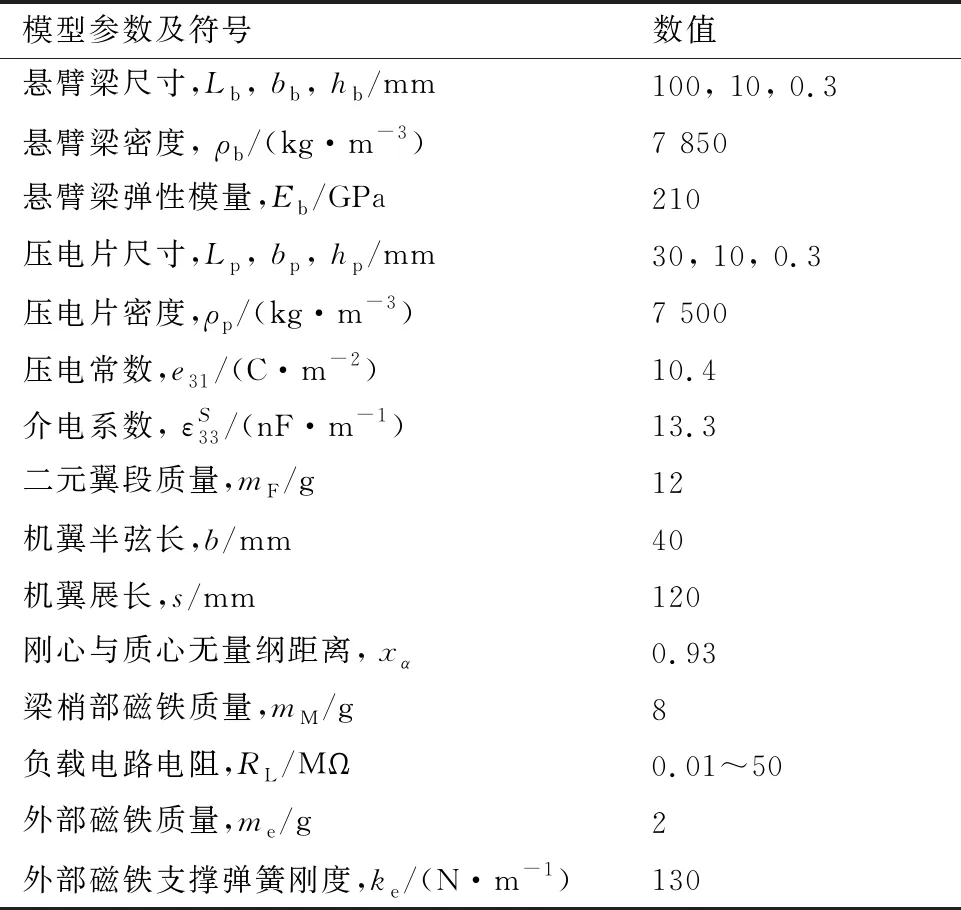
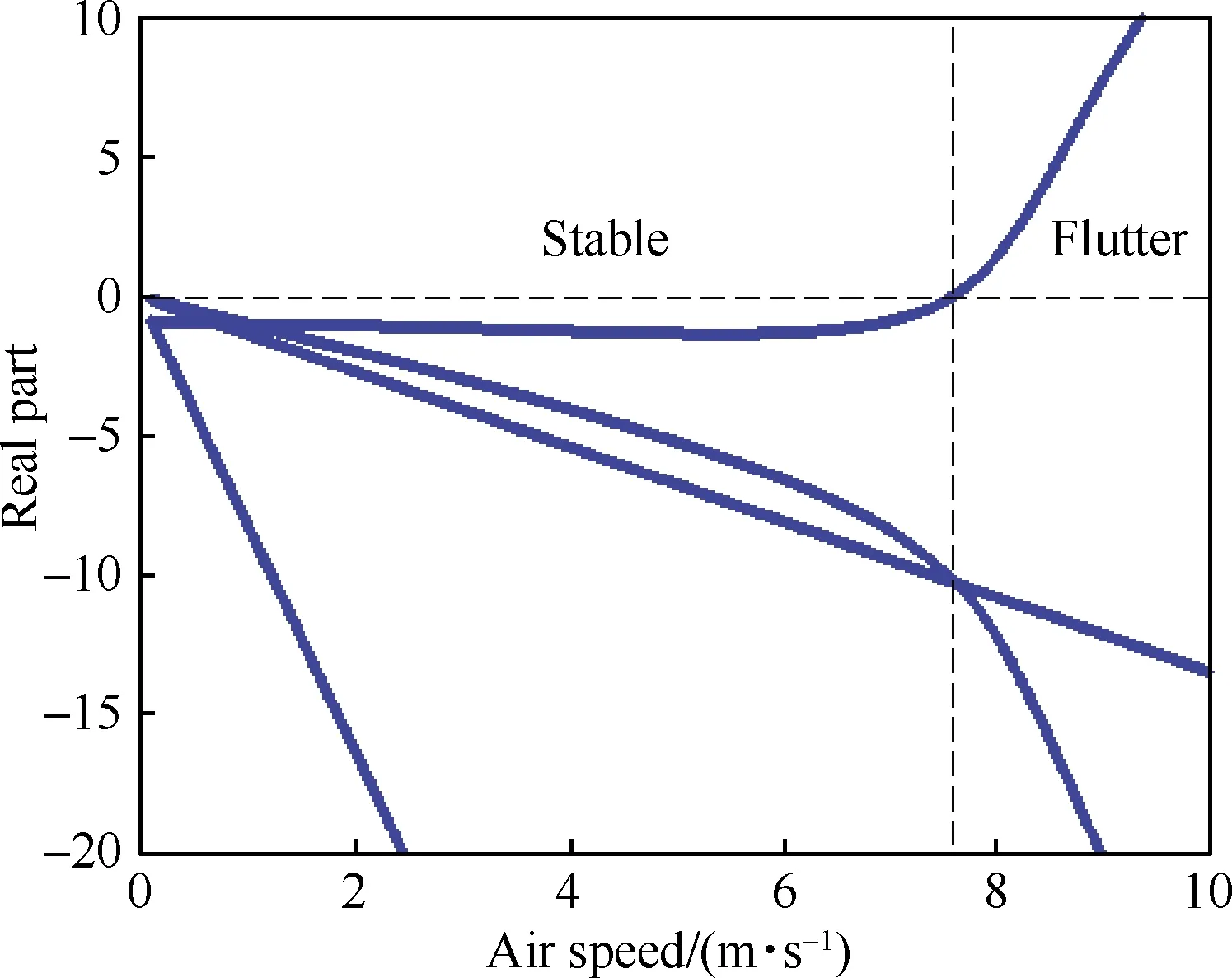
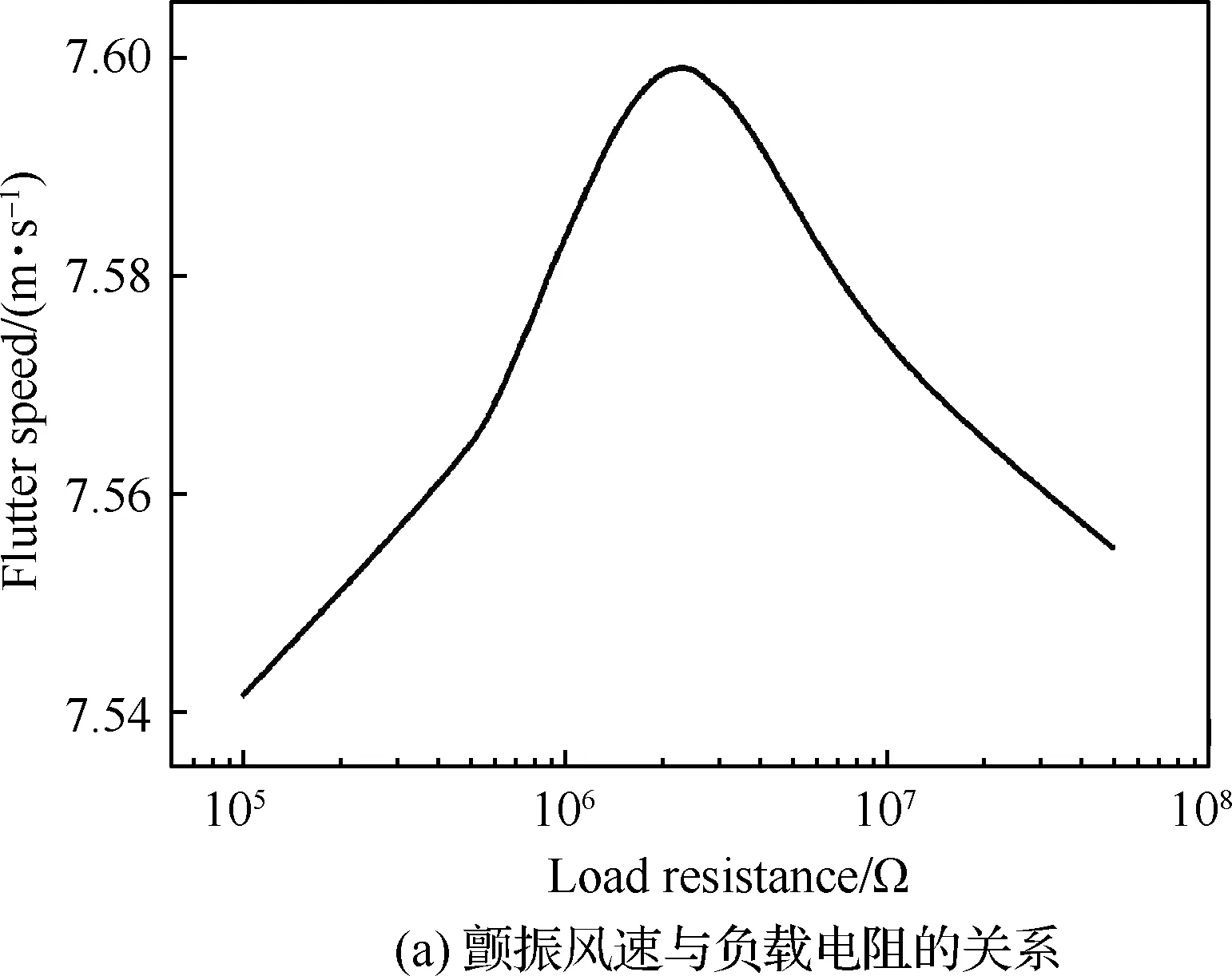
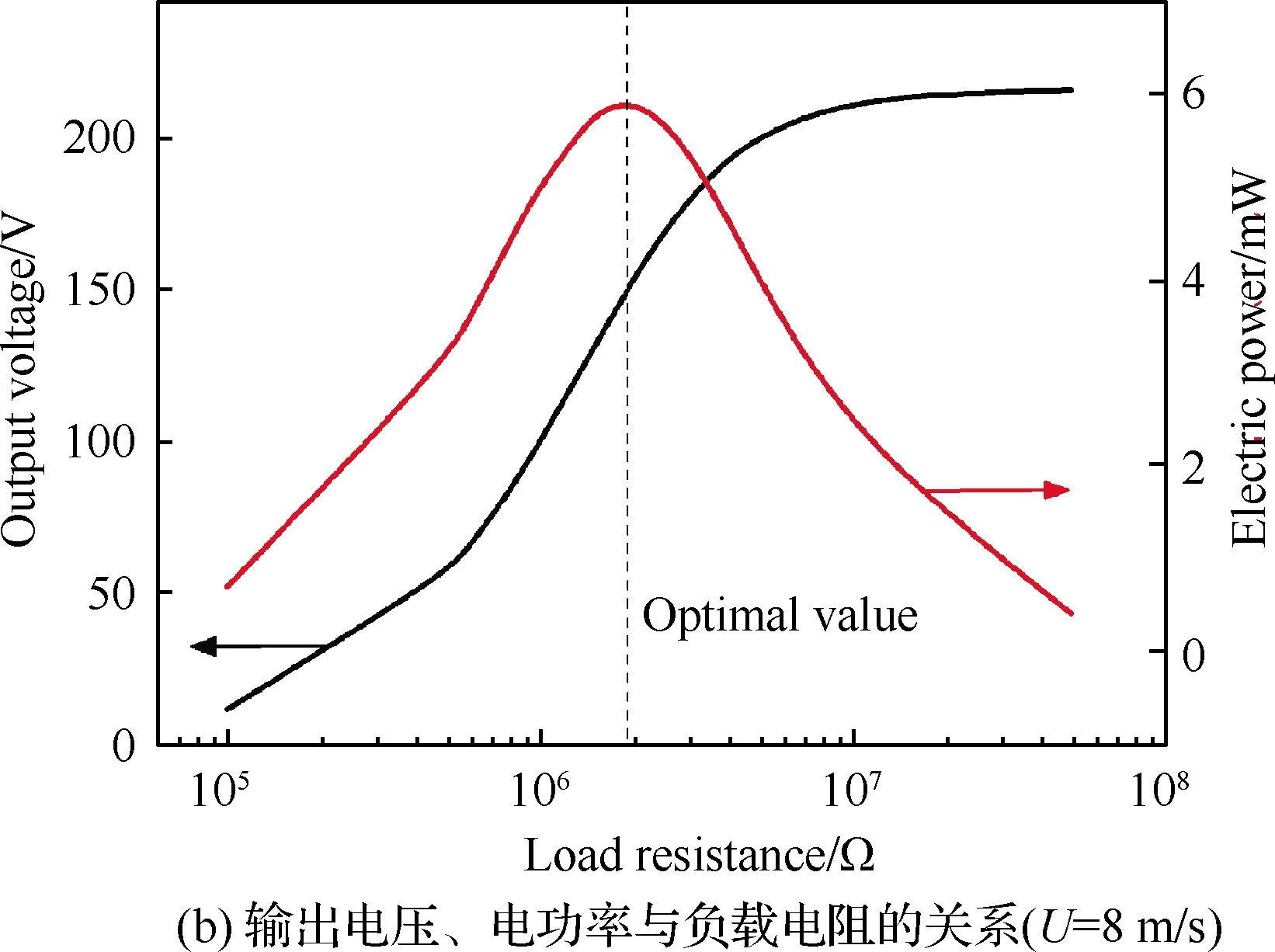
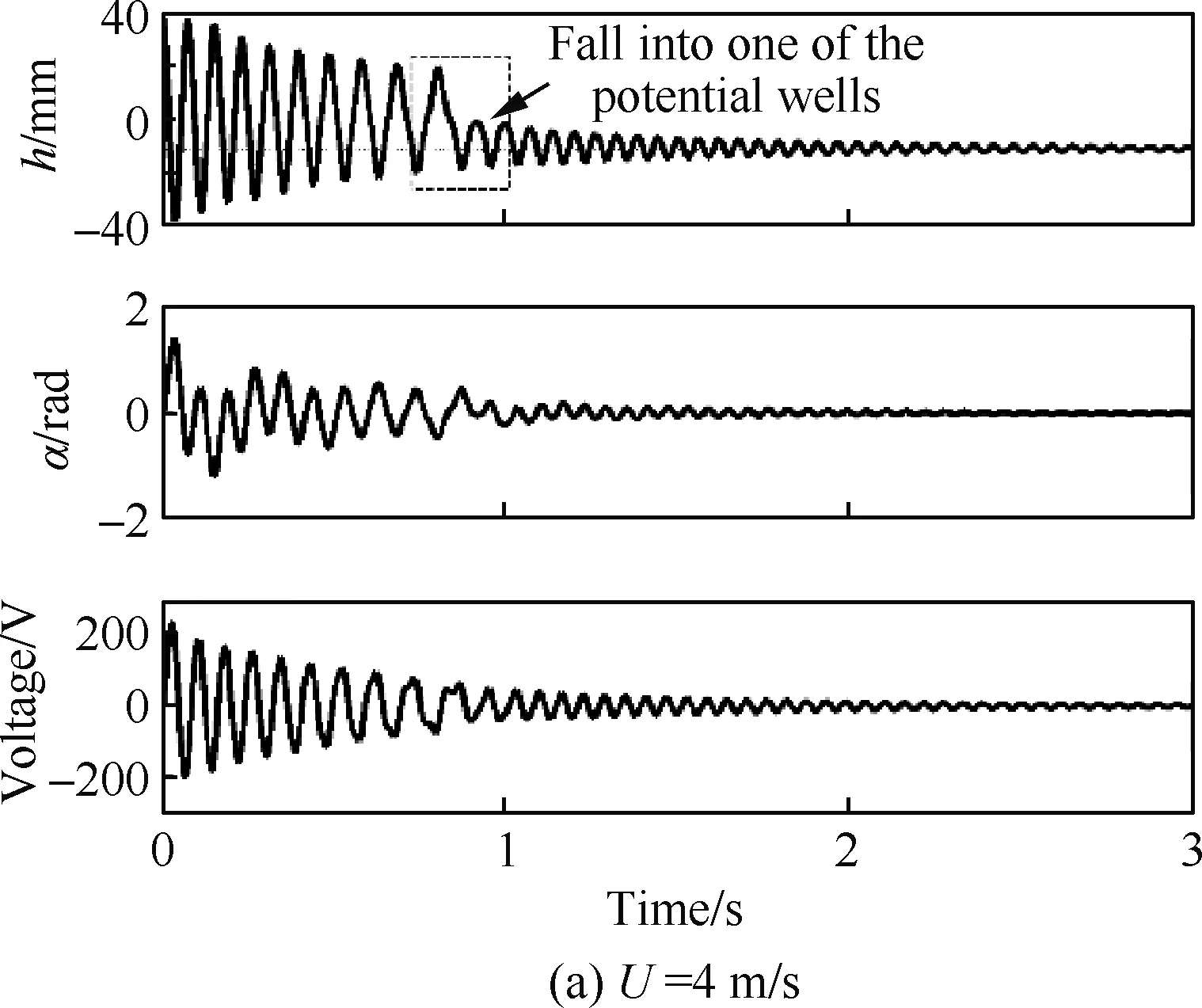
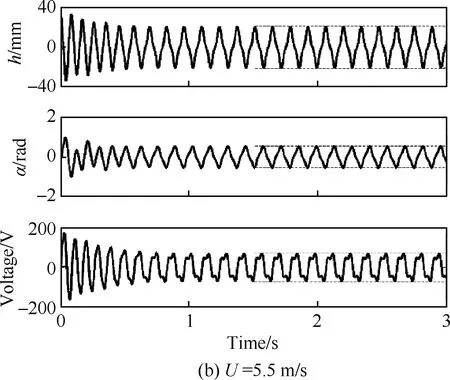
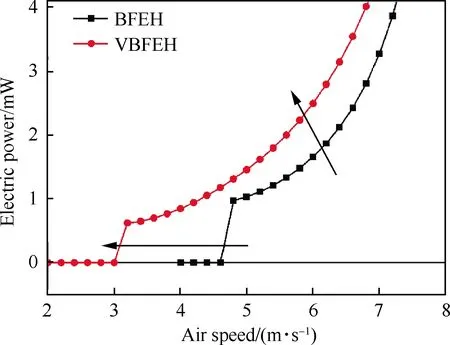
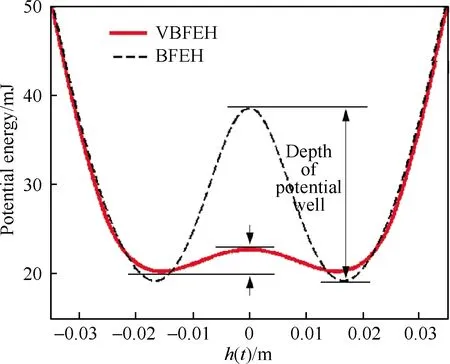
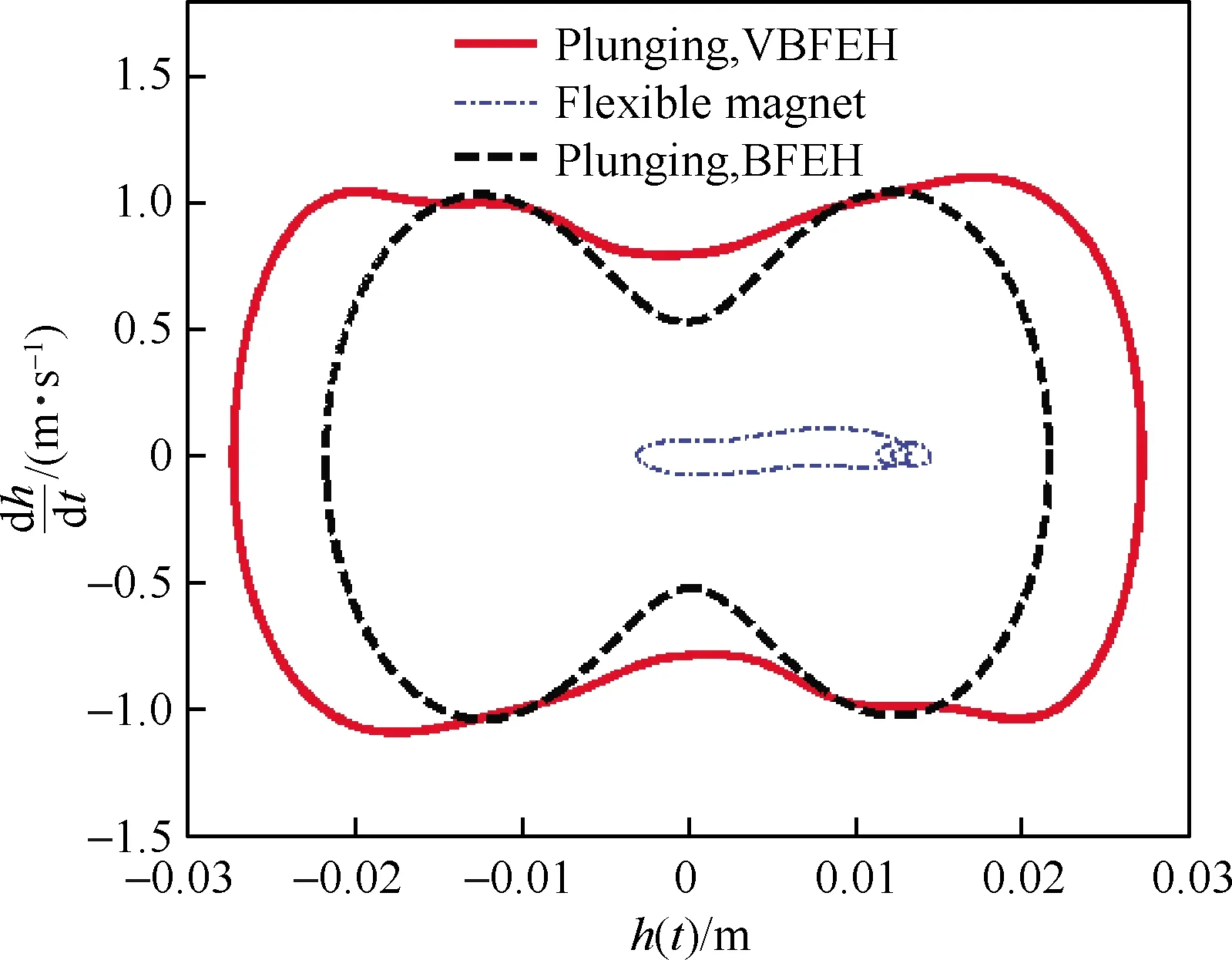
當間距小于臨界值(D 圖5 雙穩(wěn)態(tài)構(gòu)型的勢能阱曲線Fig.5 Potential well curves of bi-stable configuration (29) 式中:M、K、C分別為沉浮和俯仰自由度的質(zhì)量、剛度、阻尼矩陣。 定義顫振能量收集系統(tǒng)向負載電路輸出的平均電功率為 (30) 式中:T為穩(wěn)態(tài)極限環(huán)振蕩的周期。 利用顫振能量收集系統(tǒng)的理論模型式(29),采用四階Runge-Kutta法對狀態(tài)空間方程進行求解,計算能量收集器的結(jié)構(gòu)響應(yīng)以及輸出電壓、電功率。下文將對傳統(tǒng)的無磁耦合顫振能量收集器(Flutter Energy Harvester, FEH)、磁耦合雙穩(wěn)態(tài)顫振能量收集器(BFEH)以及變勢能阱雙穩(wěn)態(tài)顫振能量收集器(VBFEH)進行仿真對比研究,分析雙穩(wěn)態(tài)構(gòu)型以及變勢能阱雙穩(wěn)態(tài)技術(shù)對顫振能量收集性能的影響。 仿真模型中的幾何和物理參數(shù)如表1所示,參考了本文作者在文獻[14]中的模型參數(shù),其中,懸臂梁材料為鋼,壓電片材料為PZT-5A。 表1 幾何和材料性能Table 1 Dimensions and material properties 當沒有外部磁鐵時,退化為傳統(tǒng)的顫振能量收集器,將其作為能量收集性能的參照基準。根據(jù)壓電-氣動彈性系統(tǒng)的穩(wěn)定性理論[7, 22],隨著風(fēng)速增大,當無磁耦合系統(tǒng)式(29)的特征根出現(xiàn)正實部時,能量收集器將發(fā)生動態(tài)失穩(wěn),此時的風(fēng)速U就是能量收集系統(tǒng)工作的啟動風(fēng)速。 圖6所示為系統(tǒng)的特征根軌跡曲線,從圖中可以得到無磁耦合系統(tǒng)的顫振風(fēng)速為7.6 m/s,能量收集系統(tǒng)只有在高于該風(fēng)速時才能開始工作,阻礙了其在低風(fēng)速環(huán)境中的應(yīng)用。 圖7所示為負載電阻對顫振能量收集器(FEH)的影響。其中,圖7(a)展示了負載電阻與顫振始發(fā)風(fēng)速的關(guān)系,隨著負載電阻的增大,能量收集器的顫振風(fēng)速提高,達到最大值后逐漸減低。利用壓電梁理論[7]計算得到的本文能量收集器的機電耦合系數(shù)為θ=0.05 mN/V,是弱機電耦合系統(tǒng),因此,負載電阻對顫振穩(wěn)定性的改變并不明顯。但從圖7(b)中可以看出,負載電阻對輸出電功率的性能卻有著顯著的影響。系統(tǒng)的輸出電壓隨負載增大而逐漸增大后趨于穩(wěn)定值,而輸出電功率的變化規(guī)律則與顫振風(fēng)速相似,出現(xiàn)了先增大后降低的趨勢,存在最優(yōu)的負載電阻使得顫振風(fēng)速和輸出電功率幾乎同時達到最大值,仿真分析得到的最優(yōu)負載電阻約為RL,opt=2 MΩ,下文將針對該最優(yōu)負載進行雙穩(wěn)態(tài)系統(tǒng)能量收集性能的理論研究。 圖6 無磁耦合能量收集系統(tǒng)(FEH)根軌跡分析Fig.6 Root-Loci analysis of FEH system without magnetic force 圖7 負載電阻對顫振能量收集系統(tǒng)的影響Fig.7 Effect of load resistance on performance of flutter energy harvesting 首先,對外部磁鐵固定安裝(u=0)的雙穩(wěn)態(tài)顫振能量收集器的性能進行分析。由式(28)可得,出現(xiàn)雙穩(wěn)態(tài)構(gòu)型的磁鐵臨界間距為Dcr=24.6 mm,小于臨界值時系統(tǒng)出現(xiàn)雙穩(wěn)態(tài)。 圖8所示為磁鐵間距D=20 mm時,顫振能量收集器進入工作前后的動態(tài)響應(yīng)時域?qū)Ρ取oL(fēng)速為U=4 m/s時,顫振能量收集器受擾動后的振動逐漸衰減,最終被束縛在其中一個勢能阱內(nèi) (hs=-11.4 mm)。當風(fēng)速為U=5.5 m/s時,系統(tǒng)在氣流的激勵下能夠發(fā)生極限環(huán)振動,圍繞2個平衡點在勢能阱間往復(fù)躍遷。顯然,雙穩(wěn)態(tài)顫振能量收集器在低于無磁耦合系統(tǒng)的線性顫振風(fēng)速下,便能夠有效地工作,用于收集電能。在U=5.5 m/s的風(fēng)速下,雙穩(wěn)態(tài)顫振能量收集器的穩(wěn)態(tài)輸出電壓的幅值為72 V,平均輸出電功率達到1.3 mW。 圖8 不同風(fēng)速下雙穩(wěn)態(tài)顫振能量收集系統(tǒng)的時域響應(yīng)Fig.8 Responses of bi-stable flutter energy harvesting at different air speeds 3.3.1 內(nèi)外部磁鐵間距的影響 圖9為選取不同磁鐵間距D時,雙穩(wěn)態(tài)顫振能量收集系統(tǒng)(BFEH)的輸出電功率隨風(fēng)速變化的分叉圖。從結(jié)果中可以看出,F(xiàn)EH達到線性顫振風(fēng)速后才能發(fā)生極限環(huán)振動,輸出電功率的幅值隨著風(fēng)速的增加而連續(xù)增長,這是氣動彈性系統(tǒng)的超臨界顫振特性。而BFEH在線性顫振風(fēng)速之前,就可以利用雙穩(wěn)態(tài)勢能阱間的跳躍行為(snap-through),使系統(tǒng)提前進入極限環(huán)振動狀態(tài)來收集電能。輸出電功率的幅值在顫振發(fā)生前后存在著突變,氣動彈性系統(tǒng)的動力學(xué)行為由超臨界顫振轉(zhuǎn)變?yōu)閬喤R界顫振。在文獻[23]中,作者對磁耦合雙穩(wěn)態(tài)系統(tǒng)的亞臨界顫振特性進行了風(fēng)洞試驗研究,亞臨界顫振特性的拓撲改變與本節(jié)的仿真結(jié)果一致,體現(xiàn)了本文建模與仿真分析的正確性。 借助雙穩(wěn)態(tài)構(gòu)型,顫振能量收集器能夠在較低的風(fēng)速環(huán)境下開始工作,意味著能量收集器的有效工作風(fēng)速范圍得到了拓寬。以磁鐵間距D=23 mm為例,BFEH的顫振始發(fā)風(fēng)速僅為3.2 m/s,比FEH降低了4.4 m/s,工作風(fēng)速向低速區(qū)域延拓了58%。即使在FEH的線性顫振風(fēng)速范圍內(nèi)(U>7.6 m/s),BFEH的輸出電功率也仍然相對較高,BFEH相比FEH在整個風(fēng)速區(qū)間內(nèi)都展現(xiàn)出優(yōu)越的能量收集性能。 隨著磁鐵間距減小,雙穩(wěn)態(tài)能量收集器的輸出電功率幅值有所提升,但同時也導(dǎo)致極限環(huán)振動的始發(fā)風(fēng)速隨之提高,系統(tǒng)的工作風(fēng)速范圍逐漸變窄。因此,拓寬能量收集系統(tǒng)工作的風(fēng)速范圍與增大輸出電功率,這兩方面的性能需要折中考慮,如圖9所示,無法通過調(diào)整磁鐵間距實現(xiàn)性能的同步增強。 圖9 磁鐵間距對輸出電功率的影響Fig.9 Effect of separation distances on output electric power 3.3.2 磁偶極矩的影響 從式(25)和式(26)可知,改變磁偶極矩矢量將直接影響非線性的磁力的大小,影響系統(tǒng)的動力學(xué)特性。以D=20 mm時的雙穩(wěn)態(tài)構(gòu)型為例,分別取外部磁鐵1倍、1.5倍、2倍的磁偶極矩進行仿真,結(jié)果如圖10所示,提高磁鐵的磁偶極矩,能量收集系統(tǒng)受到的磁力增大,輸出電能功率得到了有效地提升,但與減小磁鐵間距的結(jié)果類似,增大磁偶極矩同樣提高了顫振始發(fā)風(fēng)速,縮小了能量收集系統(tǒng)工作的風(fēng)速范圍。 圖10 磁偶極矩對輸出電功率的影響Fig.10 Effect of magnetic dipole moment on output electric power 為了進一步增強顫振能量收集系統(tǒng)的性能,解決在雙穩(wěn)態(tài)顫振能量收集系統(tǒng)中,工作風(fēng)速范圍和輸出電功率無法同步提升的局限,下文繼續(xù)討論彈簧支撐外部磁鐵的運動對雙穩(wěn)態(tài)顫振能量收集性能的影響。 圖11所示為外部磁鐵固定時(D=20 mm)的雙穩(wěn)態(tài)顫振能量收集(BFEH),與彈簧支撐情況下(D=18.5 mm)的變勢能阱雙穩(wěn)態(tài)顫振能量收集器(VBFEH)的性能對比。變勢能阱雙穩(wěn)態(tài)能量收集器的參數(shù)見表1。從結(jié)果中可以發(fā)現(xiàn)VBFEH的極限環(huán)始發(fā)風(fēng)速比BFEH降低了1.6 m/s,能量收集系統(tǒng)的工作風(fēng)速相對拓寬1/3,并且輸出電功率沒有像BFEH那樣出現(xiàn)下降的趨勢,反而在整個風(fēng)速區(qū)間內(nèi)得到了提升。以風(fēng)速U=6 m/s時為例,BFEH的輸出電功率為1.65 mW,而VBFEH的輸出電功率達到2.49 mW,同比增加了約51%。 雙穩(wěn)態(tài)勢能阱的深度可定義為不穩(wěn)定平衡點和穩(wěn)定平衡點之間的勢能差值,它反映了系統(tǒng)初始動能為零時,從穩(wěn)定點的勢能阱底部上升至不穩(wěn)定點處勢能阱峰值處,繼而完成勢能阱間躍遷所需要的最少的非保守力做功。增強磁力可以增大平衡點間的距離,擴大雙穩(wěn)態(tài)的運動幅值,但也同時加深了勢能阱的深度,束縛氣動彈性系統(tǒng)在勢阱間的躍遷,導(dǎo)致顫振風(fēng)速升高。 圖11 變勢能阱雙穩(wěn)態(tài)與磁鐵固定時雙穩(wěn)態(tài)顫振能量收集系統(tǒng)性能對比Fig.11 Comparison of energy harvesting performance between proposed VBFEH and BFEH 圖12為VBFEH與BFEH的勢能阱曲線對比,當外部磁鐵固定時,系統(tǒng)的勢阱深度為19.36 mJ;而對于外部磁鐵有彈簧支撐的情況,當系統(tǒng)朝著沉浮位移零點運動時,外部磁鐵受到排斥性磁力后逐漸遠離內(nèi)部磁鐵,系統(tǒng)的勢能曲線隨著沉浮運動而實時改變,此時VBFEH的勢能阱深度僅為2.45 mJ,能量收集器更容易在低風(fēng)速下完成阱間躍遷運動。同時,磁場引起的磁勢能在不穩(wěn)定平衡點附近被釋放,轉(zhuǎn)換為顫振能量收集系統(tǒng)的動能,使系統(tǒng)發(fā)生繞2個平衡點的更大幅值的極限環(huán)振動。在相同風(fēng)速下(以U=6 m/s為例),VBFEH和BFEH的沉浮運動相圖如圖13所示,VBFEH的相圖更加平滑,在不穩(wěn)定點處沒有出現(xiàn)明顯的凹陷,當系統(tǒng)穿越不穩(wěn)定點時,VBFEH的沉浮運動速度較快,最終的極限環(huán)幅值也更大,從而提升了輸出電壓和電功率。 在隨機激勵的雙穩(wěn)態(tài)振動能量收集中,Lan和Qin[19]通過附加吸引性磁鐵來降低不穩(wěn)定點處的勢能,從而將勢能阱的深度變淺,輔助雙穩(wěn)態(tài)系統(tǒng)在較低的振動水平下完成勢阱間的躍遷。本文利用外部磁鐵的彈性運動,以機械的方式實現(xiàn)了類似的勢能阱調(diào)控,降低顫振能量收集器對環(huán)境風(fēng)速的敏感度,研究結(jié)果證明,變勢能阱技術(shù)能夠在降低顫振始發(fā)風(fēng)速的前提下,進一步提高能量收集的性能,為多穩(wěn)態(tài)氣動彈性能量收集系統(tǒng)的設(shè)計提供了參考。 圖12 外部磁鐵彈性運動與固定情況下的勢能阱對比Fig.12 Comparison of potential well between VBFEH and BFEH 圖13 VBFEH和BFEH沉浮運動相軌跡對比 (U=6 m/s)Fig.13 Orbit trajectories of plunging DOF for VBFEH and BFEH (U=6 m/s) 1) 引入非線性磁力和變勢能阱技術(shù),設(shè)計了一類新型變勢能阱雙穩(wěn)態(tài)顫振能量收集器,建立了磁力-壓電-氣動彈性耦合的顫振能量收集系統(tǒng)理論分析模型。利用磁偶極模型和平衡點的穩(wěn)定性理論,確定了顫振能量收集系統(tǒng)出現(xiàn)雙穩(wěn)態(tài)構(gòu)型的內(nèi)外部磁鐵間距的參數(shù)范圍。 2) 數(shù)值研究了雙穩(wěn)態(tài)構(gòu)型的磁鐵間距、磁偶極矩對能量收集性能的影響規(guī)律。在雙穩(wěn)態(tài)構(gòu)型下,原始無磁力系統(tǒng)的超臨界顫振變?yōu)閬喤R界顫振,低于線性顫振風(fēng)速時系統(tǒng)便能夠發(fā)生幅值穩(wěn)定的極限環(huán)振動,在低風(fēng)速下的能量收集性能顯著提高。 3) 利用彈性支撐的外部磁鐵的運動實現(xiàn)了變勢能阱技術(shù),解決了雙穩(wěn)態(tài)能量收集系統(tǒng)的工作風(fēng)速范圍與輸出電功率無法同步提升的局限,從而進一步增強了雙穩(wěn)態(tài)顫振能量收集系統(tǒng)的性能。利用勢能阱理論解釋了變勢能阱技術(shù)對顫振能量收集性能的增強機理,提高了系統(tǒng)對風(fēng)場環(huán)境的適應(yīng)性。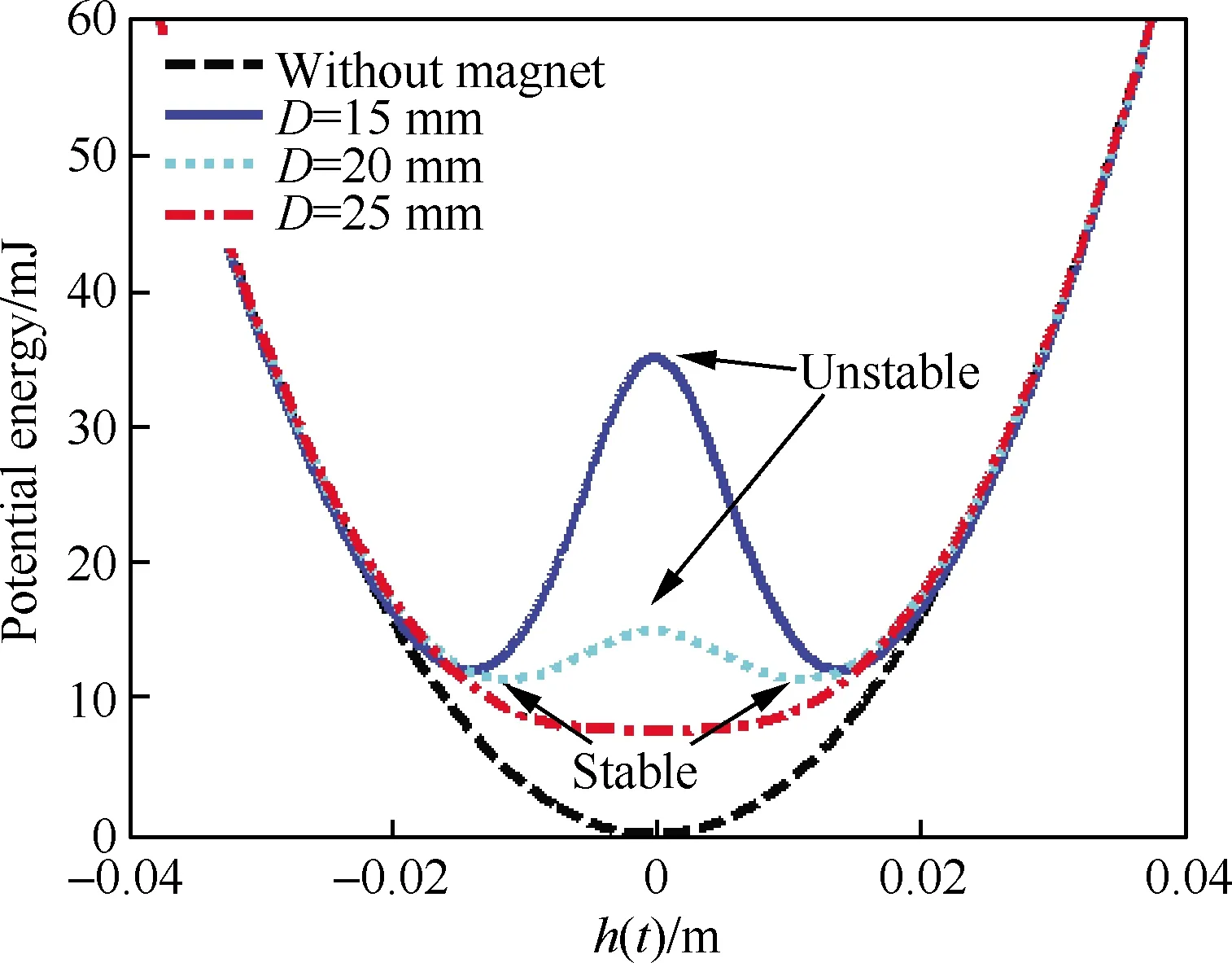
2.4 狀態(tài)空間方程
3 數(shù)值仿真驗證
3.1 模型參數(shù)
3.2 無磁耦合顫振能量收集器(FEH)
3.3 雙穩(wěn)態(tài)顫振能量收集性能(BFEH)


3.4 變勢能阱技術(shù)的性能增強機理(VBFEH)
4 結(jié) 論
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
電機與控制應(yīng)用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
西南交通大學(xué)學(xué)報(2016年4期)2016-06-15 20:29:37
電測與儀表(2015年8期)2015-04-09 11:50:06
