布站方式對(duì)基于TDOA的干擾源定位影響分析
2021-04-16 13:07:42胡人丹
導(dǎo)航定位與授時(shí) 2021年2期
胡人丹,常 青
(北京航空航天大學(xué)電子信息工程學(xué)院,北京 100083)
0 引言
隨著無(wú)線電技術(shù)的發(fā)展,電子信息戰(zhàn)是當(dāng)代社會(huì)戰(zhàn)爭(zhēng)的重要組成部分,如何識(shí)別和定位各種干擾成為了影響戰(zhàn)局的關(guān)鍵性因素[1]。定位通常分為有源定位和無(wú)源定位,有源定位是指系統(tǒng)自身發(fā)射信號(hào),并通過(guò)信號(hào)的反射實(shí)現(xiàn)定位的方式;無(wú)源定位是在不發(fā)射電磁波的情況下,通過(guò)接收干擾源發(fā)射的信號(hào)實(shí)現(xiàn)定位的方式。無(wú)源定位技術(shù)與有源定位相比,擁有良好的隱蔽性,以及較強(qiáng)的戰(zhàn)場(chǎng)生存能力。
常用的無(wú)源定位技術(shù)有基于交叉測(cè)角(Angle of Arrival,AOA)的定位技術(shù)、基于到達(dá)時(shí)間(Time of Arrival,TOA)的定位技術(shù)[2]、基于到達(dá)頻率差(Frequency Difference of Arrival,F(xiàn)DOA)的定位技術(shù)[3]和基于信號(hào)到達(dá)時(shí)間差(Time Difference of Arrival,TDOA)的定位技術(shù)[4-5]。TDOA定位技術(shù)基于輻射源信號(hào)到達(dá)各接收站的時(shí)間差,一般需要多個(gè)接收站測(cè)量同一個(gè)輻射源信號(hào)的到達(dá)時(shí)間。通過(guò)信號(hào)到達(dá)的時(shí)間差可以計(jì)算出距離差,當(dāng)距離差為一個(gè)常數(shù)時(shí),輻射源與接收站之間的位置關(guān)系就滿足一個(gè)雙曲線(面)方程[6]。在二維平面中,至少需要3個(gè)接收站才能計(jì)算出2個(gè)時(shí)間差,2個(gè)時(shí)間差就能得到2條雙曲線,而雙曲線的交點(diǎn)就是輻射源的位置。在三維空間中,至少需要4個(gè)接收站才能對(duì)干擾源進(jìn)行定位。雙曲線定位方法是一種較為精確的定位方法[7],但也存在一些缺點(diǎn),如當(dāng)2條雙曲線的交點(diǎn)不止一個(gè)時(shí),就出現(xiàn)了模糊解問(wèn)題。
在TDOA定位方式中,布站方式對(duì)模糊解區(qū)域的分布以及定位精度的影響很大[8]。在二維平面中,接收站之間的基線長(zhǎng)度和接收站之間的角度對(duì)模糊區(qū)域分布具有較大影響。在三維立體空間中,接收機(jī)布站的形狀和基線長(zhǎng)度對(duì)幾何精度因子(Geometric Dilution of Precision,GDOP)也有較大影響[9]。
本文針對(duì)TDOA定位方法中的布站問(wèn)題,在二維平面對(duì)模糊區(qū)域進(jìn)行仿真,得到了模糊解區(qū)域分布與接收站布站之間的關(guān)系。通過(guò)公式推導(dǎo)可以得出接收站的布站方式對(duì)TDOA系統(tǒng)的定位精度有較大的影響。為了定量分析不同的布站情況對(duì)TDOA定位精度的影響,本文對(duì)四站三維接收站進(jìn)行了不同形狀的布站并進(jìn)行了仿真驗(yàn)證。仿真結(jié)果對(duì)實(shí)際工程應(yīng)用中的TDOA布站有較強(qiáng)的借鑒意義。
1 TDOA定位原理
1.1 TDOA定位算法
多站時(shí)差定位算法要在空間中對(duì)輻射源進(jìn)行定位,至少需要3個(gè)方程形成3個(gè)雙曲面,這就至少需要4個(gè)接收站同步完成輻射源信號(hào)TDOA的測(cè)量,定位原理如圖1所示。4個(gè)接收站中包括1個(gè)主站和3個(gè)輔站。
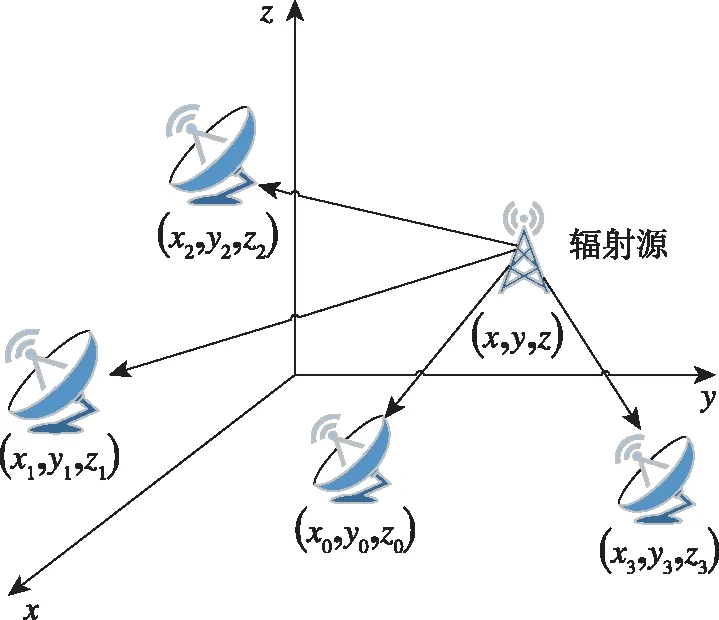
圖1 基于TDOA的無(wú)源定位系統(tǒng)示意圖Fig.1 Schematic diagram of passive location system based on TDOA
設(shè)待定的目標(biāo)位置為(x,y,z)T,主站坐標(biāo)為 (x0,y0,z0)T,輔站坐標(biāo)為(xi,yi,zi)T(i=1,2,3),r0表示目標(biāo)到主站的距離,ri表示目標(biāo)到各測(cè)量輔站的距離。目標(biāo)到主站距離與到輔站距離的距離差為Δri,那么可得定位方程
(1)
式中,c為電波傳播速度;Δti為目標(biāo)信號(hào)到達(dá)第i個(gè)輔站與到達(dá)主站之間的時(shí)間差測(cè)量值;cΔti為第i個(gè)輔站到主站的距離差測(cè)量值。式(1)為一組關(guān)于目標(biāo)輻射源位置坐標(biāo)(x,y,z)的非線性方程組,目前有很多文獻(xiàn)研究了關(guān)于這個(gè)方程組的解法,如Chan氏算法[10]、泰勒級(jí)數(shù)展開(kāi)法[11]、球面相交法[12]和去距離最小二乘法[13]等。其中Chan氏算法是求解雙曲線方程組的一種具有解析表達(dá)式解的非遞歸算法,該算法的特點(diǎn)是計(jì)算量小,無(wú)需做迭代運(yùn)算,并可得到較好的定位結(jié)果。
1.2 Chan氏算法定位模型
利用Chan氏算法對(duì)式(1)整理化簡(jiǎn)可得
(x0-xi)x+(y0-yi)y+(z0-zi)z=ki+r0Δri
(2)
其中

(3)
為求解這個(gè)方程組式,可先將r0看作一個(gè)已知量,因此可得如下矩陣表達(dá)式
AX=F
(4)
其中
(5)
X=[xyz]T
(6)
(7)
在合適的布置接收站的位置條件下,即主站與任意2個(gè)輔站不在一條直線上時(shí),rank(A)=3,用偽逆法求解方程(4),可以得到
(8)
令
(9)
由式(8)可得
(10)
其中
(11)
在這里為了方便計(jì)算,假設(shè)x0=y0=z0=0,即參考主站的坐標(biāo)在原點(diǎn)。此時(shí)式(4)中的
(12)
(13)
其中
(14)
此時(shí)x、y、z的解為
(15)
其中
(16)
因?yàn)橹髡驹谧鴺?biāo)原點(diǎn),因此可以得到
(17)
將式(15)代入式(17)得
(18)
其中
(19)
由式(18)可解得r0的2個(gè)根
(20)
將r0代入式(1),即可得到目標(biāo)點(diǎn)的坐標(biāo)(x,y,z)。
2 GDOP定位精度分析
2.1 GDOP定位精度模型
對(duì)Δri=ri-r0兩邊同時(shí)取微分
dΔri=(Hix-H0x)dx+(Hiy-H0y)dy+
(Hiz-H0z)dz+(ki-k0), (i=1,2,3)
(21)
其中
(22)
ki=Hixdxi+Hiydyi+Hizdzi, (i=0,1,2,3)
(23)
寫(xiě)成矢量形式為
dΔR=HdR+dS
(24)
其中主站與各輔站TDOA測(cè)量引入的誤差為
dΔR=[dΔr1dΔr2dΔr3]T
(25)
欲求的目標(biāo)定位誤差為
dR=[dxdydz]T
(26)
各站站址引入的測(cè)量誤差為
dS=[k1-k0k2-k0k3-k0]T
(27)
其中
(28)
由式(28)可得定位誤差估計(jì)值的最小二乘解
(29)
由式(29)可知,目標(biāo)定位誤差(dxdydz)T與時(shí)差測(cè)量誤差dΔR、站址測(cè)量誤差dS及目標(biāo)相對(duì)各站位置有關(guān)。由于各時(shí)間差測(cè)量信息中都包含有主站測(cè)量信息,即各時(shí)間差誤差中都包含有共同的誤差因素,因此各Δri的測(cè)量誤差是相關(guān)的[14]。設(shè)Δri測(cè)量誤差經(jīng)系統(tǒng)修正后是零均值的,而站址誤差在每次測(cè)量中是保持不變的,且站址誤差各元素之間及各站址誤差間互不相關(guān),則定位誤差協(xié)方差為
Pdr=E[dRdRT]
=C{E[dΔRdΔRT]+E[dSdST]}CT
(30)
式中
C=(HTH)-1HT=[cij]3×3
(31)
E[dΔRdΔRT]=
(32)
E[dSdST]=
(33)
其中,σΔri為第i個(gè)輔站與主站之間的測(cè)量誤差標(biāo)準(zhǔn)差;ηij表示Δri與Δrj之間的相關(guān)系數(shù)
(34)
σxi、σyi、σzi為各站址測(cè)量誤差分量的標(biāo)準(zhǔn)差。假設(shè)各站址測(cè)量誤差標(biāo)準(zhǔn)差相同,即
(35)
又因?yàn)?/p>
(36)
可得
(37)
令
[eij]3×3=E[dΔrdΔrT]+E[dSdST]
(38)
[eij]3×3=
(39)
[eij]3×3=
(40)
由此可得定位誤差在x、y、z上的方差分別為
(41)
則
(42)
2.2 定位無(wú)解區(qū)與定位模糊區(qū)原因分析
對(duì)關(guān)于r0的一元二次方程ar02+br0+c=0進(jìn)行求解,可以得到r0的數(shù)值解。根據(jù)一元二次方程的特點(diǎn),可以從解的情來(lái)進(jìn)行分析[15]。
1)Δ=b2-4ac<0時(shí),方程的解為2個(gè)虛數(shù),方程無(wú)實(shí)數(shù)解,無(wú)法準(zhǔn)確定位。
2)Δ=b2-4ac=0時(shí),方程有唯一解,能夠準(zhǔn)確定位且定位結(jié)果唯一。
3)Δ=b2-4ac>0時(shí),方程有2個(gè)解r01和r02,此時(shí)又可以分為以下兩種情況:
(1)r01r02<0,取r01和r02中正值為定位結(jié)果;
(2)r01r02>0,若r01和r02都為正,則此時(shí)出現(xiàn)了定位模糊,需要借助一定手段來(lái)消除定位模糊。
在實(shí)際系統(tǒng)中,由于噪聲干擾、多路徑傳輸和信道環(huán)境惡劣等原因?qū)е碌臅r(shí)差測(cè)量誤差不可避免。時(shí)差測(cè)量誤差使原本相交的雙曲線出現(xiàn)偏移,進(jìn)而導(dǎo)致出現(xiàn)無(wú)解情況。
3 仿真驗(yàn)證
3.1 平面三站系統(tǒng)模糊度仿真
如圖2所示,以主站S0為坐標(biāo)原點(diǎn)建立坐標(biāo)系,輔站S1到主站S0之間的距離為L(zhǎng)1,輔站S2到主站S0之間的距離為L(zhǎng)2。L1與L2之間的夾角為θ,L1和L2的長(zhǎng)度為基線長(zhǎng)度。
對(duì)圖2所示的時(shí)差定位系統(tǒng)在不同布站形式下的模糊度進(jìn)行仿真,分別將夾角設(shè)置為60°、90°和120°,同時(shí)改變基線長(zhǎng)度,設(shè)置坐標(biāo)如表1所示。仿真假設(shè)X、Y坐標(biāo)范圍均為[-200,200],單位為km,仿真結(jié)果如圖3~圖8所示。

表1 不同條件下接收站位置坐標(biāo)
圖3和圖4為夾角60°時(shí)基線長(zhǎng)度分別為10km和20km布站條件下的模糊區(qū)域分布情況;圖5和圖6為夾角90°時(shí)基線長(zhǎng)度分別為10km和20km布站條件下的模糊區(qū)域分布情況;圖7和圖8為夾角120°時(shí)基線長(zhǎng)度分別為10km和20km布站條件下的模糊區(qū)域分布情況,圖中藍(lán)色的點(diǎn)為定位模糊點(diǎn)。通過(guò)對(duì)比圖3和圖4可以得到,基線長(zhǎng)度增加,模糊區(qū)域減小;通過(guò)對(duì)比圖3、圖5和圖7可
以得到,模糊區(qū)域主要分布在基線延長(zhǎng)線及其夾角區(qū)域。接收站輔站與主站形成的夾角增大,則主站上方的無(wú)模糊區(qū)域增加,主站下方延長(zhǎng)線形成的模糊區(qū)域也增加。

圖3 夾角為60°基線長(zhǎng)度為10km的模糊區(qū)Fig.3 Fuzzy area with the included angle of 60 degrees and the baseline length of 10km
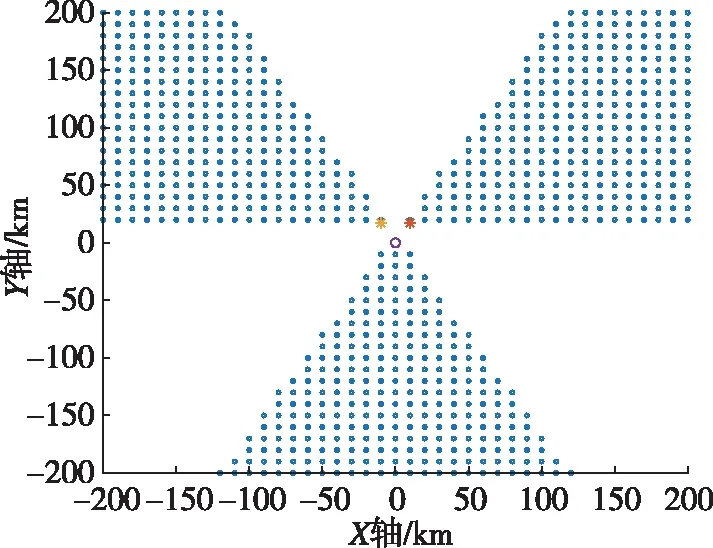
圖4 夾角為60°基線長(zhǎng)度為20km的模糊區(qū)Fig.4 Fuzzy area with the included angle of 60 degrees and the baseline length of 20km

圖5 夾角為90°基線長(zhǎng)度為10km的模糊區(qū)Fig.5 Fuzzy area with the included angle of 90 degrees and the baseline length of 10km

圖6 夾角為90°基線長(zhǎng)度為20km的模糊區(qū)Fig.6 Fuzzy area with the included angle of 90 degrees and the baseline length of 20km

圖7 夾角為120°基線長(zhǎng)度為10km的模糊區(qū)Fig.7 Fuzzy area with the included angle of 120 degrees and the baseline length of 10km

圖8 夾角為120°基線長(zhǎng)度為20km的模糊區(qū)Fig.8 Fuzzy area with the included angle of 120 degrees and the baseline length of 20km
3.2 四站三維系統(tǒng)精度仿真
決定定位精度大小的因素包括:站址測(cè)量誤差標(biāo)準(zhǔn)差、各接收站與目標(biāo)輻射源的幾何位置、接收站的布站方式和時(shí)差測(cè)量誤差標(biāo)準(zhǔn)差等。其中對(duì)定位精度影響最大的因素是各接收站與目標(biāo)輻射源之間的幾何位置關(guān)系[16]。通過(guò)觀察GDOP的表達(dá)式可以看出,GDOP的物理意義為3個(gè)坐標(biāo)軸方向上的測(cè)量誤差,因此GDOP越小,誤差越小,測(cè)量精度越高。下面對(duì)三種最常見(jiàn)的布站方式進(jìn)行GDOP仿真,這三種布站方式分別是:菱形、Y形和T形。各站坐標(biāo)如表2所示。

表2 不同形狀下接收站位置坐標(biāo)
仿真假設(shè)X、Y坐標(biāo)范圍均為[-300,300],單位為km,時(shí)差測(cè)量精度固定為10ns,仿真結(jié)果如圖9~圖14所示。
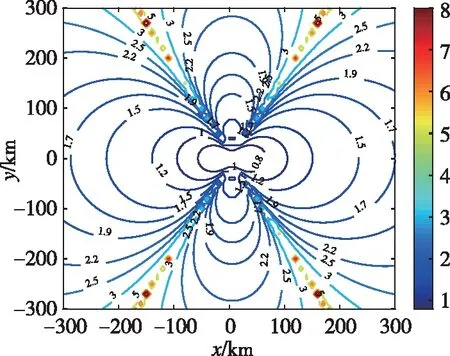
圖9 基線長(zhǎng)度為10km菱形布站下的GDOP分布Fig.9 The GDOP distribution under the rhombus station with a baseline length of 10km

圖10 基線長(zhǎng)度為20km菱形布站的GDOP分布Fig.10 The GDOP distribution under the rhombus station with a baseline length of 20km

圖11 基線長(zhǎng)度為10km Y形布站的GDOP分布Fig.11 The GDOP distribution with a baseline length of 10km Y shaped station

圖12 基線長(zhǎng)度為20km Y形布站的GDOP分布Fig.12 The GDOP distribution with a baseline length of 20km Y shaped station

圖13 基線長(zhǎng)度為10km T形布站的GDOP分布Fig.13 The GDOP distribution with a baseline length of 10km T shaped station
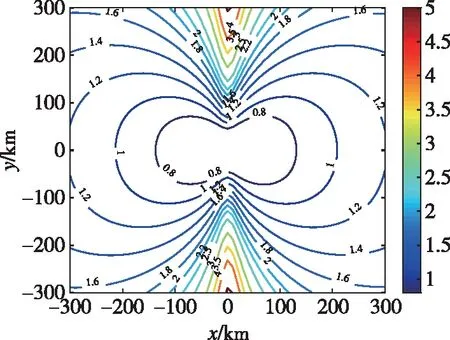
圖14 基線長(zhǎng)度為20km T形布站的GDOP分布Fig.14 The GDOP distribution with a baseline length of 20km T shaped station
圖9和圖10分別為基線長(zhǎng)度為10km和20km時(shí)菱形布站下的GDOP分布,通過(guò)觀察可以得到:基線長(zhǎng)度越長(zhǎng),在相同坐標(biāo)點(diǎn)的GDOP越小,定位精度越高。圖11和圖12分別為基線長(zhǎng)度為10km和20km時(shí)Y形布站下的GDOP分布,圖13和圖14分別為基線長(zhǎng)度為10km和20km時(shí)T形布站下的GDOP分布,通過(guò)對(duì)比圖9、圖11和圖12可知,在相同基線長(zhǎng)度下,Y形布站各個(gè)方向的GDOP分布較為均勻;菱形布站在對(duì)角線連線區(qū)域定位精度較高,在基線延長(zhǎng)線方向定位精度較低;T形布站在三站在同一條延長(zhǎng)線方向上的定位精度較高,在其垂直方向定位精度較低。
4 結(jié)論
本文針對(duì)無(wú)源時(shí)差定位原理及精度進(jìn)行了理論分析,仿真了二維不同布站條件下的模糊區(qū)域分布,以及四站三維不同布站條件下的GDOP分布。仿真結(jié)果表明:
1)二維模糊區(qū)域分布由基線長(zhǎng)度和基線夾角所決定,模糊區(qū)域主要分布在基線延長(zhǎng)線夾角區(qū)域。
2)通過(guò)觀察四站三維不同形狀的接收機(jī)布站可以得到,在相同布站形狀下基線長(zhǎng)度越長(zhǎng),同樣位置的GDOP越小。在實(shí)際布站時(shí),將接收站之間的距離布置的稍微寬一點(diǎn)有利于提高定位精度。
3)在四站三維接收機(jī)布站條件下,同樣的基線長(zhǎng)度,Y形布站在各個(gè)方向的定位精度都較好,且較為均勻;菱形布站在接收站延長(zhǎng)線方向的定位精度較好,在接收站延長(zhǎng)線夾角方向的定位精度較差;T形布站在三站在同一條延長(zhǎng)線方向上的定位精度較好。當(dāng)不確定輻射源位置時(shí),用Y形布站較為合理。

- 導(dǎo)航定位與授時(shí)的其它文章
- 基于帶有事件觸發(fā)機(jī)制的集員濾波的RSSI室內(nèi)移動(dòng)定位
- 基于對(duì)偶四元數(shù)的捷聯(lián)慣導(dǎo)算法在發(fā)射點(diǎn)慣性系下的應(yīng)用研究
- 基于非導(dǎo)航隨機(jī)信號(hào)的組合導(dǎo)航技術(shù)研究
- 三脈沖冷原子陀螺儀中基于內(nèi)態(tài)演化的拉曼光光強(qiáng)補(bǔ)償算法
- 核磁共振陀螺儀中共振磁場(chǎng)強(qiáng)度優(yōu)化研究
- 基于數(shù)值微分計(jì)算的SERF原子自旋慣性測(cè)量動(dòng)態(tài)仿真