分析電子和光學傳感器的目標定位關鍵技術
2021-06-26 06:40:22侯瀚森劉海川劉展羽
中國科技縱橫 2021年6期
關鍵詞:關聯
侯瀚森 劉海川 劉展羽
(歐勒姆電氣(珠海)有限公司,廣東珠海 519000)
電子傳感器和光學傳感器是當前比較先進的設備,是進行水域監測極為重要的技術。其中電子傳感器監測的范圍較廣,對目標的截獲率較高,且不受惡劣天氣情況的影響,但這一技術在實際運用過程中定位的精度相對較低,有時候會影響到工作人員對監測目標的定位精度;而光學傳感器能對目標進行精準定位,且對目標識別度高,但在具體應用中,極易受到天氣情況劇烈變化的影響[1]。因此,研究這兩種傳感器對于目標進行精準定位的關鍵性技術,具有十分重要的價值。
1.電子和光學傳感器目標定位的關鍵技術分析
1.1 電子傳感器目標定位原理
運用電子傳感器進行定位,主要是借助無源定位技術來進行的。這種定位技術主要是依靠“雙曲線定位”法,這種方法也被稱為時差定位法[2]。因為輻射源和觀測點具有一定的距離,并且在彼此的位置上存在一些不同的因素,因此,電磁波到達這兩個位置的時間存在著一個時間差值,而大多數情況下,這個時間差值都輸固定的,因此,就可以進行雙曲線計算定位。其計算的公式如下:
根據這一算式,p(k)的平均值就可以進行進一步的計算。
μ(k)=σμ(k?1)+(1?σ)p(k)
在這一計算公式中,δ是一個連續值,μ(k)是p(k)的平均值。這里面判斷信號源的閾值恒等式為:I=cσ12。其中“I”代表著信號源的閾值,而“c”則是一個連續值,σ21是輸入到低通道濾波器中的噪聲功率。如果μ(k)>cσ12,就證明信號源來自于輻射源目標[3]。
1.2 光學傳感器目標定位原理
光學傳感器對目標進行定位,其依據的原理主要是利用相應的工具,從獲取的圖像上提取出相應的信息資源或參數。一般來說,主要是根據圖像的分辨率s,同時利用圖像像素的尺寸m,并結合目標圖像與衛星之間的距離d。其計算公式為:
在實際生活中,衛星一般都處于太空的固定高度,工作人員一般通過將收獲的圖像套入到衛星圖像當中,并設置衛星點坐標,使其能在空間高度上相互重合,從而計算出目標點在地球坐標系內的實際傾角α及方位角β的實際度數。這些參數的計算公式分別為:

1.3 三星時差定位技術
三星時差定位技術也屬于無源定位技術的一種,其所應用的原理(見圖1)與電子及光學傳感器的目標定位原理相差無幾。
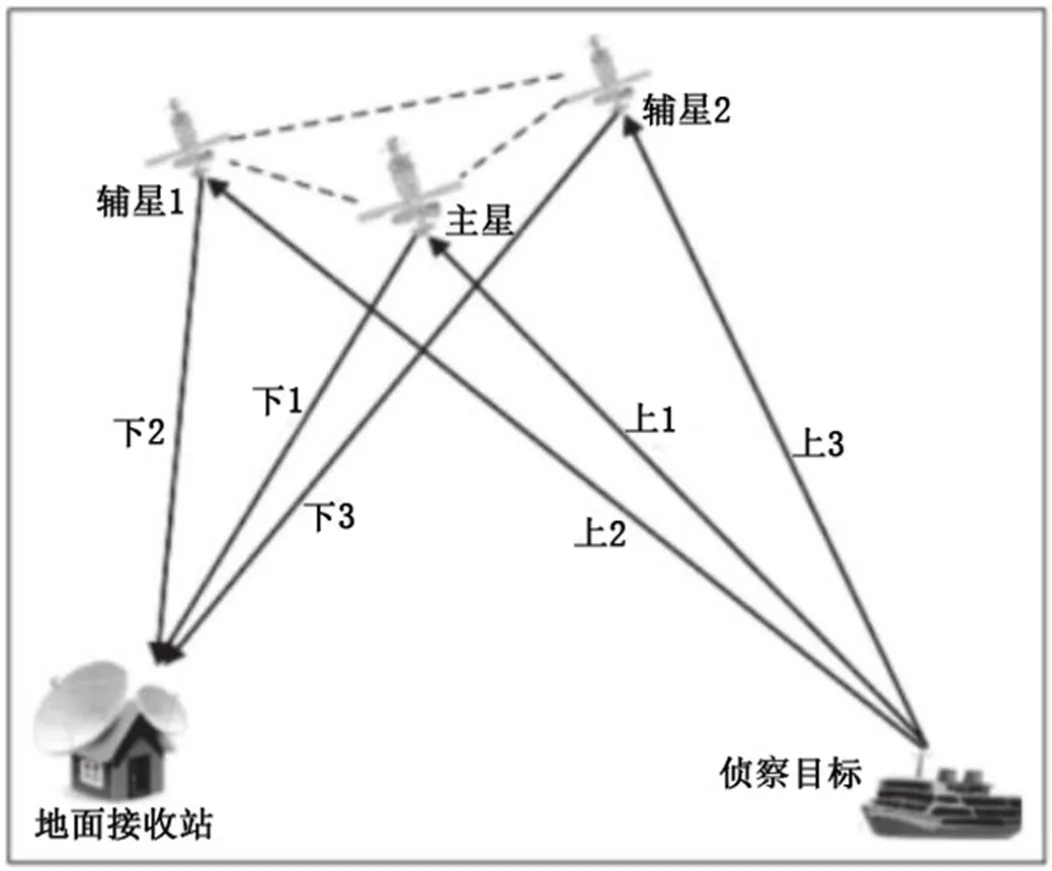
圖1 三星時差定位原理圖
在實際運用中,衛星測量站在接到原有輻射源的信號后,會根據實際的額應用需求與技術標準,對該信號數據進行一定的調整,然后將調整后的信號數據發送給地面處理器,這樣既為地面處理技術人員提供了信息,同時也可以利用地面處理器對該信號進行相應的分析和處理,從而實現信息的共享。
2.基于傳感器探測目標位置特征的關聯算法分析
2.1 基于坐標變換的關聯算法
在實際生活中,探測目標的位置不可能固定不動,特別是進行水域監測時。因此,在對目標所處的位置進行定位時,大都會利用基于坐標變換的關聯算法來得到最終的結果,但在實際運用中,這種利用基于目標坐標變換的關聯算法,極易受到定位誤差的影響而出現一定的偏差,從而影響到結果的可靠性與精準度。
2.2 基于全局結構的關聯算法
因為基于坐標變換的關聯算法易出現較大的偏差,加之這種算法無法對全局間變換的關系進行準確的表示,因此,技術人員為了解決這一問題,提出了基于全局結構的關聯算法對操作進行更加精準的控制。
這一種關聯算法在實際的運用中,首先是以我國的航對編隊作為中心點,構建出全劇結構的特征向量,然后借助關聯算法進行計算。但在實際運用中,因為船隊編隊不是固定在水面不動的,而是按照一定方向前進的,這就會導致在不同的探測行動中,監測到的數據參數存在較大的偏差[4]。因此,技術人員采用了局限結構特征結構法來作為探測的中心點,并逐步構建出整體結構的特征向量,這樣得出的數據參數不會對全局的發展造成太大的影響。
在具體操作中,技術人員可以根據目標的位置,提出最接近的特征Eu和Cv,然后以這兩個點作為中心點,分別構建出電子探測目標點集和光學探測目標點集的整體結構特征矢量圖即可。其計算公式分別為:Eu=(ri,θi);Cv=(rj,θj)。
2.3 基于譜特征矢量的關聯算法
在實際生活中,譜特征矢量是一種常用的特殊的描述圖形在匹配期間位置的方式。這種描述方式較其他的結構關聯算法,在計算量方面更少,因此,計算花費的時間也較少,同時,運用這種計算方法,還能夠有效縮小目標位置定位的誤差。
在具體的運用過程中,普特征矢量關聯計算主要包括3個步驟,分別是:第一,構建表示的矩陣;第二,分解表示矩陣的奇異值;第三,構造關聯度量。一般來說,工作人員可以通過電子探測的結果,對目標的位置點進行全連接圖的構建,然后將探測到的所有的位置權值都連接在一起,供技術人員進行參考。而在這一操作過程中,可以運用近鄰矩陣“A”來對其進行表示,這樣就可以借助“A”矩陣對Laplace矩陣進行推算。
2.4 電子和光學傳感器的關聯算法
在運用基于譜特征矢量的關聯算法進行目標定位時,如果技術人員在工作的過程中存在數據漏檢的行為,就會導致計算結果精度出現較大的偏差。針對這一問題,技術人員必須從根本上對其進行優化。因此,技術人員可以借助電子和光學傳感器對漏檢目標進行檢測,以有效降低自身操作失誤而出現漏檢的情況[5]。同時,還可以立足于單幀數據拓撲特征的關聯算法與多幀數據位置信息的關聯算法進行比對,以此提高計算的準確性。
3.結語
隨著科學技術的快速發展,傳感器技術已經廣泛應用在各個方面。在星載電子和光學傳感器的運用中,對于電子傳感器和光學傳感器的目標定位和關鍵技術要求極高。本文就闡述了電子和光學傳感器的目標定位技術原理,在此基礎上探討了基于目標變換的關聯算法、基于全局結構的關聯算法、基于譜特征矢量的關聯算法以及電子和光學傳感器的關聯算法,希望能對相關人員的工作提供參考。
猜你喜歡
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:30
當代陜西(2021年17期)2021-11-06 03:21:36
原道(2020年2期)2020-12-21 05:47:06
當代陜西(2019年15期)2019-09-02 01:52:00
中國非營利評論(2018年2期)2018-06-18 10:48:50
學苑創造·A版(2018年11期)2018-02-01 06:29:20
自動化學報(2017年1期)2017-03-11 17:31:17
讀者(2017年5期)2017-02-15 18:04:18
西藏科技(2016年5期)2016-09-26 12:16:39
振動工程學報(2015年1期)2015-03-01 01:15:42