基于VR操控的無人機系統在農業教學中的應用
2021-07-09 16:57:01林志瑋黃秀萍洪宇
教育教學論壇 2021年20期
關鍵詞:VR技術
林志瑋 黃秀萍 洪宇


[摘 要] 為促進無人機技術在高校農業教學中的應用,培養農用無人機應用技術人才,提升農業生產的信息化與精準化,設計了一個基于VR操控的無人機模擬系統,并應用于農業教學實踐中。該系統在VR技術支持下實現沉浸式教學體驗,提升了學生對無人機理論知識的掌握程度,解決了教學實踐中無人機設備短缺的問題;實時視覺定位無人機的航行環境并創建三維點云地圖,實現了農業信息獲取的可視化與實時性。該系統具有完備的設計過程,能夠直接應用于無人機農業教學中,為高校培養無人機農業技術人才創造條件。
[關鍵詞] VR技術;微型無人機;農業教學
[基金項目] 2018年度福建省研究生教育教學改革項目“AR/VR技術背景下研究生教學模式改革研究與實踐”(FBJG20180197)
[作者簡介] 林志瑋(1981—),男,臺灣臺北人,博士,福建農林大學計算機與信息學院副教授,主要從事圖像處理、圖形識別研究;黃秀萍(1998—),女,福建三明人,福建農林大學計算機與信息學院2020級統計學專業碩士研究生,研究方向為統計信息技術與數據挖掘、圖像分割識別;洪 宇(1996—),女,福建南平人,福建農林大學計算機與信息學院2018級統計學專業碩士研究生,研究方向為統計信息技術與數據挖掘、圖像分割識別。
[中圖分類號] TP399? ? [文獻標識碼] A? [文章編號] 1674-9324(2021)20-0141-04? ? ?[收稿日期] 2020-12-28
一、引言
隨著科學技術的發展,基于機械化、自動化、信息化的農業機械設備為解放農業生產帶來了新機遇,農業信息化是農業可持續發展的科技體現和發展基石。將現代信息技術與農業生產實踐教學有機地結合起來,是高等農林院校須解決的一項復雜而艱巨的任務,是高校培養創新型、應用型、復合型農業信息化人才[1],發展農業現代化的基礎與保障。
受教學設備限制,目前絕大多數高校尚未開設無人機相關課程,造成無人機農業信息化人才短缺[2]。VR(virtual reality)技術是一種能夠創建和體驗虛擬世界的計算機仿真技術,將VR技術與無人機相結合,可設計一個基于VR操控的無人機飛行模擬控制系統。利用VR技術實現對虛擬無人機的操控,能夠有效解決實踐教學中無人機設備短缺的問題,同時避免學生因實體無人機操控不熟練而引發的教學事故,且具有實踐性強、展示力佳、學生施展空間大的優點[3]。系統附屬的實時視覺同步定位及建圖功能,能夠讓學生實時了解無人機偵察地點的植物分布、生長情況等實時信息。將VR+無人機技術應用于農業教學中,提升了學生在實踐教學中的融入感以及動手與創新能力,更重要的是以農業信息化為導向,對培養有競爭優勢的VR技術人才、無人機技術人才以及農業信息化人才,對滿足農業可持續發展的需求具有重要意義。福建農林大學兼備農業和計算機類專業等多方面的資源優勢,是我國農業信息化建設的主力[4],為此,他們結合優勢教學資源,構建培養VR+無人機農業技術人才的教學平臺及跨專業教學團隊,探討培養新型農業高層次人才的教學改革新思路,為符合農業現代化發展建設輸送技術人才。
二、無人機農業教學基礎與關鍵問題
(一)無人機農業教學構建的基礎
無人機農業教學融合了遙感、計算機、農業等多學科的專業知識。福建農林大學是一所以農林為特色的綜合性大學,具有相關學科的專任教師,為跨學科教學團隊的整合創造了條件。此外,具備眾多的農業教學基地,可為無人機農業教學研究提供實踐基地。
為解決實踐教學中無人機設備短缺的問題,本文提出基于VR操控的虛擬無人機飛行控制模擬系統,只需在計算機機房便能實現無人機操作的實踐教學。
(二)無人機農業教學應解決的關鍵問題
無人機農業教學涉及多學科交叉問題,在創建跨學科教學團隊時,涉及不同學院、學科的專任教師,應合理配置團隊人員,促進教學團隊的交流合作,發揮跨學科教學的優勢。
教學實踐是將理論和實踐有效結合的手段,是培養應用型人才的基礎。傳統涉及無人機設備的課程多數以理論教學為主,學生在學習過程中缺乏動手操作的機會,限制了創新型及應用型人才的培養。因此,改變傳統的教學目標,側重理論知識與實踐相結合的教學新模式,借助無人機模擬飛行控制系統培養學生制訂飛行路線、完成飛行任務、采集農業信息、執行農業植保任務的能力。
無人機目前在農業上的應用仍是新興領域,并不成熟,主要存在以下問題:(1)植保無人機操作復雜,要求操作人員掌握基本操作技能[5];
(2)飛行規劃需要考慮地形、障礙物、作業區域等因素,一般無人機不具備自動避障功能[6],易造成飛行事故,需要學生進行航線規劃[7,8]。通過開展無人機農業教學,可培養無人機技術人才,為農業信息化建設提供保障。
三、無人機教學平臺的搭建
(一)基于VR操控的無人機飛行控制模擬系統構成
基于VR操控的無人機飛行控制模擬系統的結構如圖1所示。系統主要由模擬模塊、飛控模塊、手勢識別模塊和機器學習模塊構成。無人機模擬模塊是創建虛擬無人機三維模型及在模擬地圖上的所在位置,該模塊提供了在不具有無人機設備的前提下,讓學生在實驗室機房中便能實現對無人機的飛行控制;無人機飛控模塊是對虛擬無人機進行飛行控制;手勢識別模塊是獲取手勢信息并對手勢進行識別;算法模塊是對手勢進行訓練,進而獲得具有較高識別準確率的識別模型。
(二)視覺同步定位與建圖系統構成
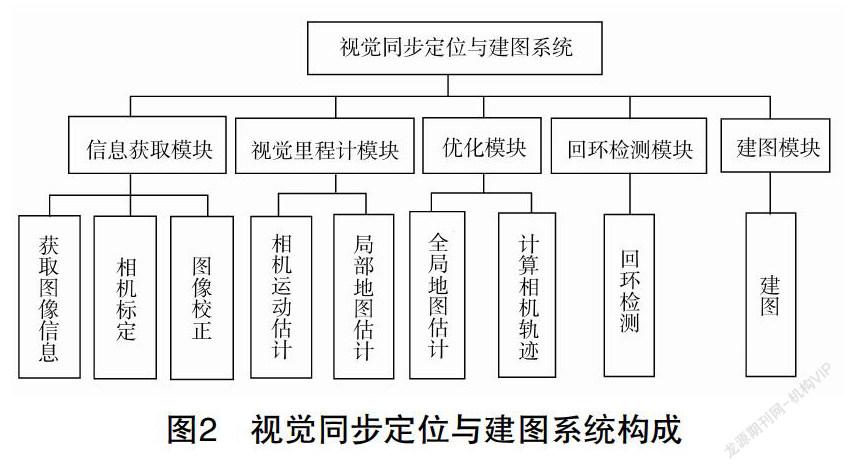
視覺同步定位與建圖系統的結構如圖2所示。該系統主要由信息獲取模塊、視覺里程計模塊、優化模塊、回環檢測模塊和建圖模塊構成。信息獲取模塊具有圖像信息獲取、相機標定和圖像校正功能;視覺里程計模塊是對相機運動和局部地圖進行估計;優化模塊是對信息進行優化以及計算相機軌跡;回環檢測模塊是用于檢測攝像機是否到達之前到達過的位置;建圖模塊是根據系統計算后得出地圖信息實時創建三維點云地圖。
猜你喜歡
新媒體研究(2017年1期)2017-03-07 03:02:03
科技傳播(2016年23期)2017-03-01 12:56:19
科技傳播(2016年19期)2016-12-27 15:58:11
中國科技博覽(2016年25期)2016-12-20 19:56:14
新媒體研究(2016年20期)2016-12-02 19:09:56
藝術科技(2016年9期)2016-11-18 16:28:21
科教導刊·電子版(2016年27期)2016-11-18 10:11:08
今傳媒(2016年7期)2016-09-07 00:35:11
電腦知識與技術(2016年20期)2016-08-19 21:15:04
科技傳播(2016年10期)2016-07-15 23:01:45
