面向低成本GNSS接收機終端的周跳修復策略
2021-12-02 04:43:02戴振東張凱淵劉佩林陳滌非許幼成
導航定位與授時 2021年6期
戴振東,張凱淵,劉佩林,陳滌非,許幼成
(1. 上海美迪索科電子科技有限公司,上海 200241; 2. 上海埃威航空電子有限公司,上海 200233)
0 引言
隨著定位技術和基礎設施的不斷發展,在高精度算法和地面基站網絡的加持下,如今一臺搭載著專業天線的測繪級接收機可以在開機后數十秒內達到厘米級的定位精度[1-3]。近年來,隨著電子設備制造技術的不斷提升,全球導航衛星系統(Global Navigation Satellite System,GNSS)設備朝著小型化和低成本化方向發展,更多的GNSS板卡以及芯片也在不斷涌現。相較于測繪級接收機,低成本GNSS接收機終端擁有更加廣闊的應用場景,例如智能手機平臺、小型無人機和機器人平臺等。在這類場景下,輕量化和低成本化幾乎是必要條件。但是相較而言,低成本接收機的定位精度遠比不上測繪級接收機,其根本原因在于硬件設備所導致的低質量觀測。在沒有多徑的開闊環境下,低成本接收機的定位精度一般在5~10m;而在嚴重的多徑環境下,其定位誤差可能達到數十米[4]。
載波相位是衛星定位中十分重要的觀測參數之一,具有噪聲小、多徑誤差小等優秀特性,經過模糊度解算后,常用于高精度的定位算法中。但是由于低成本接收機跟蹤環路的性能遠不如測繪級接收機,因此增加了信號丟失的概率,從而導致頻繁的載波相位周跳。載波相位周跳現象的存在影響了其觀測的連續性,使得利用載波相位的算法應用更為困難,例如載波相位平滑偽距以及載波相位模糊度解算技術等[5]。利用實時動態定位(Real-Time Kinematic,RTK)或精密單點定位(Precise Point Positioning,PPP)技術,低成本接收機也可以達到分米級的定位精度,但前提是需要很長時間的收斂過程,使其應用場景受到了很大限制[6]。因此,低成本接收機的高精度定位仍然是一個待解決的問題,周跳修復是其中最為關鍵的技術難點之一。
目前,對于低成本接收機周跳修復算法的研究還不夠完善。大多數基于測繪級接收機設計的傳統周跳檢測及修復算法都對接收機的偽距或多普勒觀測質量有較高的要求,從而可以利用這些觀測對載波相位存在的跳變進行檢測[7-9]。在觀測信號的頻率方面,也有利用多頻觀測的周跳檢測算法被提出,其性能明顯優于單頻的周跳檢測策略[10-12]。這些算法僅適用于觀測質量有保證且周跳發生不是很頻繁的測繪級接收機。對于低成本接收機,偽距和多普勒觀測的噪聲及誤差都很大,特別是在一些復雜環境下,接收信號的載噪比更低,進一步降低了觀測的質量。因此,研究適用于低成本接收機周跳修復的實際策略是必要的,并且該策略需要在復雜環境下仍具有一定的魯棒性。
本文提出了一種適用于低成本接收機的雙差載波相位周跳修復策略,并且利用載噪比對修復策略的有效性進行了評估。該策略的優勢在于考慮了低成本GNSS接收機的觀測特性,可以檢測并移除無效載波相位觀測,具有更強的魯棒性。
1 雙差載波相位周跳修復原理
1.1 雙差載波相位觀測
在短基線條件下,對載波相位進行雙差處理后,可以消除接收機鐘差、衛星鐘差、電離層延時和對流層延時等觀測誤差,因此雙差載波相位觀測可以表示為[13]

(1)

(2)
1.2 高階多項式擬合的載波相位周跳修復方法


(3)
在靜止或低動態場景下,無周跳的載波相位觀測可以由高階多項式擬合的方法進行估計[15]。一段長為L的雙差載波相位觀測一般利用二階多項式就可以做到比較精準的擬合,如式(4)
(4)

(5)
其中,[·]表示取整操作。值得一提的是,如果接收機本身存在半個波長的周跳現象,則需要將λ替換成λ/2來計算存在多少個半波長周跳。
2 面向低成本接收機的載波周跳修復策略
對于低成本GNSS接收機,傳統基于測繪級GNSS接收機的載波相位周跳修復方法主要存在下述問題:
1)觀測時間不穩定。對于測繪級接收機而言,觀測量的觀測時間間隔可以穩定為1s;但對于低成本接收機而言,例如手機的觀測,在實際觀測中發現存在觀測時間間隔不穩定的現象,例如兩次觀測間隔為0.999s,從而引入了1ms的觀測時間跳變。觀測時間的跳變將在實際載波相位中引入跳變,而這種跳變會被多項式擬合法誤檢測和誤修復。
2)衛星坐標也被用于本文提出的周跳修復策略中以計算基站和衛星間的距離,因此星歷誤差就需要被考慮在內。當星歷更新時,由于星歷參數的突然變化,引入一個微小的跳變,從而引起誤檢測和誤修復。
對“中國風”歌詞本身的研究,多立足于詞曲的學術研究又多從意象等文學因素入手,較少研究作品語言。如梅雨恬作品《“中國風”歌曲:傳統的現代奇觀——對流行歌曲“中國”意象變遷的文本分析》⑤就是從意象入手展開研究。再如趙娟的《互文性與原型的對話:解析“中國風”》中則主要是從文學角度闡述了對“中國風”的看法。
3)由信號遮擋所導致的低載噪比會使得低成本接收機輸出無效的載波相位觀測。這類無效觀測的主要特點是模糊度的估計值沒有明顯的跳變現象,在時間上也不是常數,從而無法在實際算法中得到應用。傳統算法無法檢測上述無效載波相位,因此需要設計算法對其進行檢測并去除,否則也會引入誤修復。
4)多徑也可能引入低載噪比,但這種情況下輸出的仍為有效載波相位觀測。為了充分在復雜環境下利用載波相位觀測,就需要有效識別多徑導致的低載噪比。
如果考慮流動站存在觀測時間的跳變并且忽視噪聲和多徑,式(1)可以變化為式(6)
(6)
其中,tr為低成本接收機作為流動站的觀測時間,并且可能經歷跳變;而tb為基站的觀測時間。式(6)經過進一步變化可得
(7)

(8)
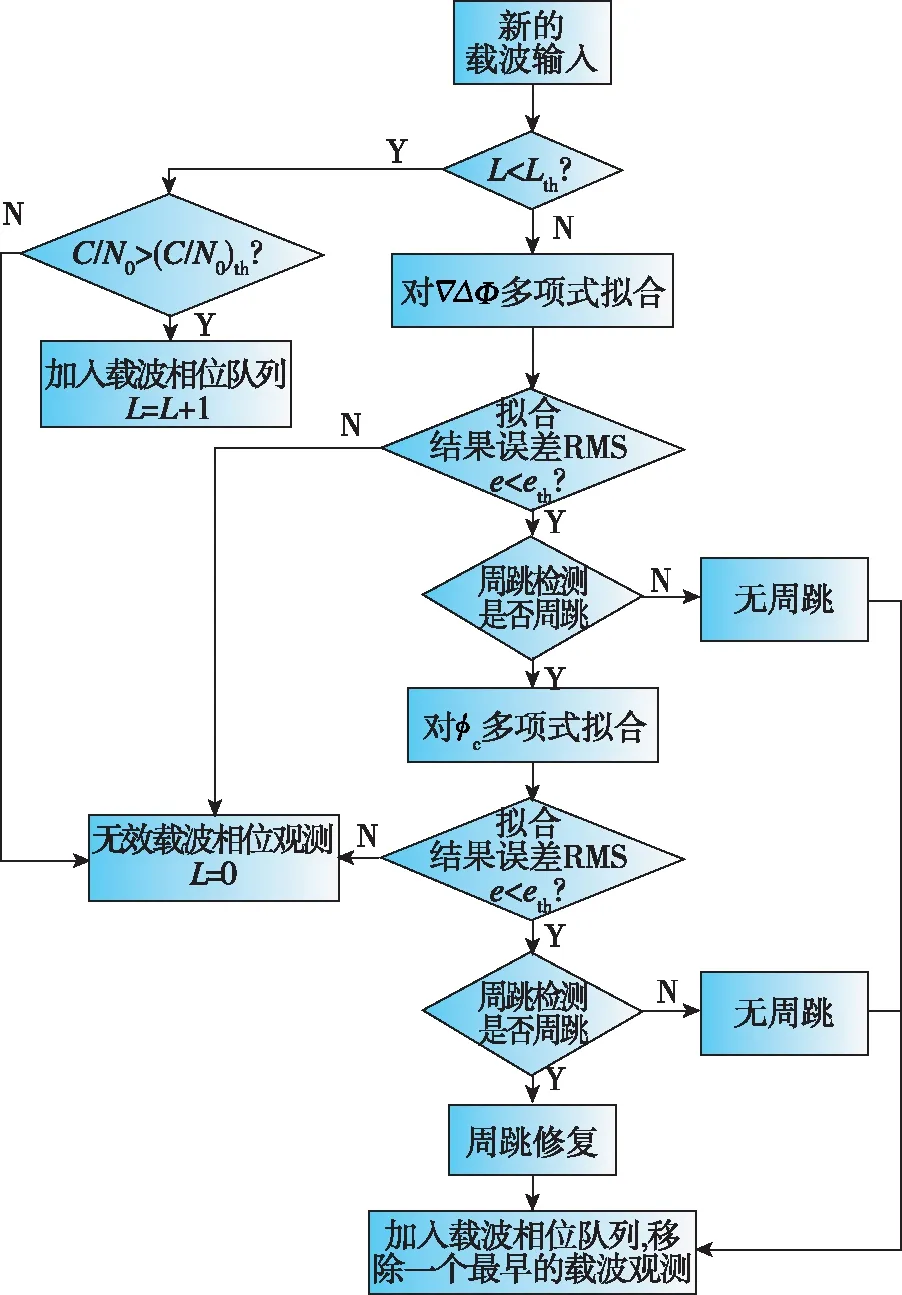
圖1 低成本GNSS接收機周跳修復策略Fig.1 Cycle-slip repair strategy for low-cost GNSS receivers

值得一提的是,只有被判斷為無周跳或周跳已被修復的觀測才被認為是有效觀測,而最初加入隊列的觀測不一定是有效觀測量,因此需要用擬合誤差進行進一步的判斷。只有有效觀測才能用于后續的定位算法中。
3 試驗驗證
3.1 試驗環境搭建
通過實際觀測對本文提出的載波相位周跳修復算法進行驗證。嵌有博通BCM47755芯片的小米8手機和ublox ZED-F9P板卡分別被作為超低成本和低成本接收機的代表進行試驗測試,如圖2所示。華測B5 GNSS接收機被用作基站提供高精度的多頻觀測,同時也用于提供厘米級的定位參考坐標,如圖3所示。

圖2 ZED-F9P接收機以及小米8手機Fig.2 ZED-F9P receiver and MI 8 smart phone
圖3 華測B5 GNSS接收機Fig.3 HUACE B5 GNSS receiver

(a)開闊場景 (b)多徑場景圖4 試驗環境Fig.4 Experimental environment
試驗分別在開闊場景和嚴重多徑場景下進行,如圖4所示,分析的數據包含全球定位系統(Global Positioning System,GPS)和北斗兩種星座。開闊場景下周圍數百米內無明顯產生多徑的建筑,觀測時間為7604s。在嚴重多徑場景下,接收機北面及西面有明顯的建筑物遮擋,觀測時間為7400s。通過這種方式可以比較不同的多徑環境對低成本GNSS接收設備的影響。
3.2 試驗結果
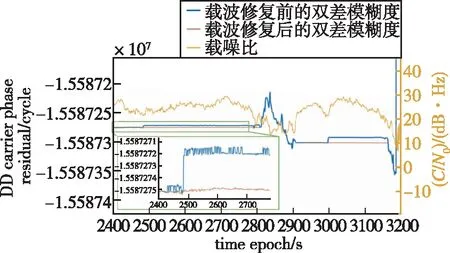
圖5 小米8在開闊場景下修復前后的雙差載波相位模糊度Fig.5 DD carrier phase ambiguity after and before cycle-slip repair of MI 8 in open sky environment
圖5所示為小米8手機在開闊場景下的G30衛星周跳修復前后的雙差模糊度估計值,該值由式(2)計算得到,可以反映模糊度隨時間的變化情況。在2809~2928s以及3165s之后的時間段,模糊度表現為無規則的變化,表明此時為明顯的無效觀測,可以發現此時段內載噪比均低于20dBHz,證明了載噪比閾值設定的合理性。在2400~2686s時間段內存在許多半周跳以及一個3周的整周跳現象(綠框內)。在3000s附近存在一個較大的整周數跳變而載噪比也處于局部最低點,表明載噪比較低時容易產生整周跳變。從整個2400~3200s時間段來看,所有的有效觀測得到了正確修復,無效觀測也被正確檢測并移除,不存在誤修復的現象。
圖6所示為F9P在開闊場景下的周跳修復前后的雙差模糊度估計值。與手機觀測相比可以發現,F9P的載波相位觀測不存在半周跳的現象,且載噪比普遍較高,在40dBHz以上。此外,可以發現F9P的觀測中也不存在無效觀測,因此所有的周跳都可以被修復。從周跳修復結果來看,兩處周跳都得到了較好的修復。
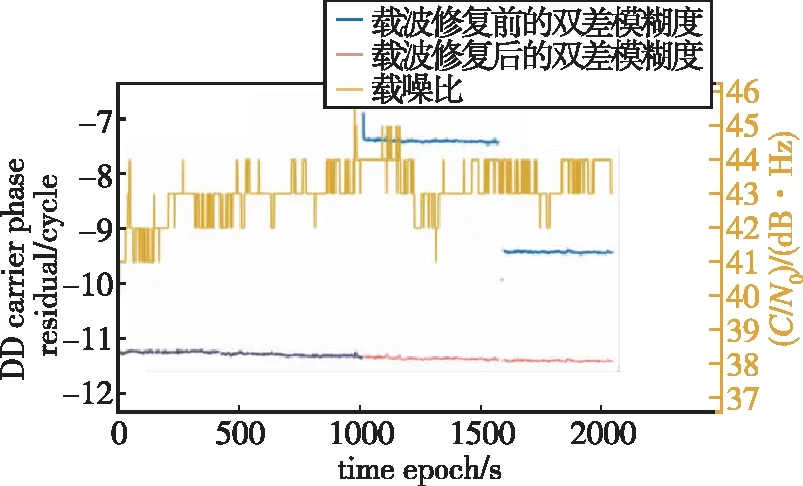
圖6 F9P在開闊場景下修復前后的雙差載波相位模糊度Fig.6 DD carrier phase ambiguity after and before cycle-slip repair of F9P in open sky environment
表1和表2分別對比了小米8手機和F9P在不同場景下的各類載波相位觀測數量以及周跳修復情況,包含GPS和北斗的所有衛星。可以發現,在多徑場景下發生周跳以及產生無效觀測的概率比在開闊場景下要更高,這是由于多徑場景下信號質量較差,載噪比較低,載波跟蹤更為困難的緣故。不論是在哪種場景下,本文提出的算法都完全修復了小米8手機以及F9P載波觀測中的周跳,但是對于存在的無效觀測仍有一定的誤修復率。對比表1和表2可以很明顯地發現,小米8的觀測比F9P觀測有更多的周跳和無效觀測,其中無效觀測的增多尤為明顯,這也是因為手機自身平面倒F天線(Planar Inverted-F Antenna, PIFA)抗多徑能力差所導致,使得其在復雜場景下的載噪比容易低于20dBHz。相比之下,F9P的載噪比能夠時常穩定在40dBHz以上,無效觀測較少。但由于本文提出的算法專門基于載噪比和多項式擬合誤差來鑒別無效觀測,使得手機無效觀測的誤修復概率明顯降低,因此具有實際價值。
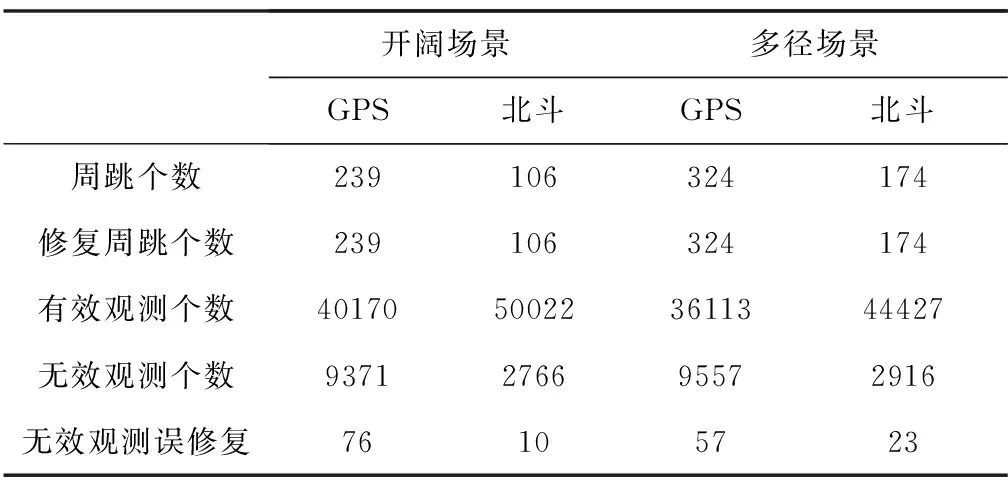
表1 小米8載波相位各類觀測數量
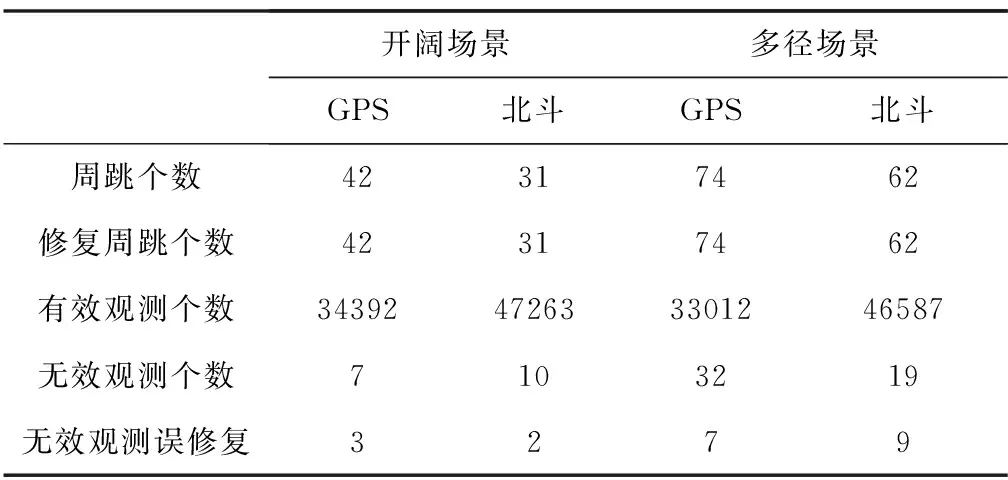
表2 F9P載波相位各類觀測數量
4 結論
本文提出了一種面向低成本接收機的周跳修復策略,能夠在實際場景下提升低成本接收機載波相位觀測的可用性。其主要貢獻在于:1)提出了利用聯合檢測以避免時鐘和星歷突變造成的誤修復;2)提出了利用載噪比和擬合誤差檢測無效載波觀測。基于小米8和F9P接收機在兩種場景下的試驗結果表明,所提策略可以有效修復周跳并降低手機載波觀測的誤修復概率,同時也揭示了載噪比在載波質量分析中的重要作用,具有實際價值。在未來的研究中,需要對動態場景下的載波修復策略進行研究,并嘗試加入諸如多普勒和偽距等觀測輔助載波修復。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
教學考試(高考化學)(2021年2期)2021-05-30 06:15:52
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·高一版(2020年3期)2020-04-21 08:03:20
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
數學大世界(2018年1期)2018-04-12 05:39:14
