分布式電驅(qū)動車輛垂向振動系統(tǒng)優(yōu)化及控制研究
2022-06-18 02:13:30孫晉偉胡曉燕
重慶理工大學(xué)學(xué)報(自然科學(xué)) 2022年5期
孫晉偉,胡曉燕
(1.“運(yùn)輸車輛檢測、診斷與維修技術(shù)”交通行業(yè)重點(diǎn)實(shí)驗(yàn)室, 濟(jì)南 250357;2.西安航空學(xué)院 車輛工程學(xué)院, 西安 710077)
0 引言
分布式電驅(qū)動車輛以其傳遞效率高、節(jié)約空間、控制性能優(yōu)越和響應(yīng)速度快等優(yōu)點(diǎn)在近年來得到了廣泛研究[1-2]。但電機(jī)引入導(dǎo)致的非簧載質(zhì)量增加、定轉(zhuǎn)子間隙變化產(chǎn)生的不平衡徑向力均對車輛垂向性能產(chǎn)生影響[3-4]。
目前,國內(nèi)外對輪轂電機(jī)驅(qū)動車輛垂向振動研究主要集中在結(jié)構(gòu)改進(jìn)和主動控制2個方面。在結(jié)構(gòu)改進(jìn)方面,羅玉濤等[5]提出了一種新型內(nèi)置橡膠懸置的拓?fù)錁?gòu)型來減小路面與電機(jī)耦合振動對平順性的影響。Nagaya等[6]設(shè)計(jì)了一種可用于電機(jī)和輪轂之間的動力吸振結(jié)構(gòu),將電機(jī)質(zhì)量由簧下轉(zhuǎn)移至簧上,同時吸收路面?zhèn)鬟f至電機(jī)的振動能量。針對輪轂電機(jī)不平衡徑向力產(chǎn)生的垂向振動負(fù)效應(yīng),Qin等[4]研究了不同路面等級、不同車速下“車身向”和“車輪向”動力吸振器對垂向性能的改善程度,并通過多體動力學(xué)仿真驗(yàn)證了所提出方案的有效性。盡管采用隔振結(jié)構(gòu)可顯著提升電動車垂向振動性能,但現(xiàn)有研究主要以結(jié)構(gòu)設(shè)計(jì)為主,未考慮多工況下系統(tǒng)參數(shù)的優(yōu)化匹配。
在主動控制方面,Katsuyama等[7]利用非簧載質(zhì)量負(fù)天棚阻尼控制器來提升乘坐舒適性,改善車身在中頻附近的振動。Shao等[8]提出了一種輸出反饋控制器來提升輪轂電機(jī)驅(qū)動車輛垂向性能,但該方法以傳統(tǒng)主動懸架控制為主。Ma等[9]在動力吸振結(jié)構(gòu)的基礎(chǔ)上增加了輪內(nèi)主動減振器來消除簧下質(zhì)量增加對平順性的影響,但忽視了電機(jī)的不平衡徑向力與路面輸入之間的耦合關(guān)系。此外,現(xiàn)有主動控制以懸架或隔振器單獨(dú)控制為主,對二者綜合控制的相關(guān)研究較少。考慮到實(shí)際輪轂電機(jī)-懸架系統(tǒng)為復(fù)雜的非線性系統(tǒng),且不同路面輸入對系統(tǒng)性能影響較大。為減少非簧載質(zhì)量增加及路面和電機(jī)耦合帶來的垂向負(fù)效應(yīng),可在系統(tǒng)參數(shù)優(yōu)化匹配的基礎(chǔ)上進(jìn)行主動控制來提升垂向性能。
針對輪轂電機(jī)懸架與吸振器參數(shù)匹配和主動振動控制的問題,基于布谷優(yōu)化搜索典型路面激勵下的最優(yōu)參數(shù),并結(jié)合天棚和地棚阻尼,提出了一種適用于輪轂電機(jī)懸架系統(tǒng)的混合控制方法,實(shí)現(xiàn)分布式電驅(qū)動車輛垂向振動系統(tǒng)參數(shù)優(yōu)化及振動抑制的目標(biāo)。
1 系統(tǒng)模型
1.1 懸架模型
輪內(nèi)動力吸振器由電機(jī)定子與車輛軸承之間布置的彈簧和阻尼組成,該結(jié)構(gòu)可同時將電機(jī)質(zhì)量和制動器質(zhì)量轉(zhuǎn)化為輪內(nèi)懸浮質(zhì)量。帶有動力吸振器的輪轂電機(jī)懸架模型如圖1所示。

圖1 輪轂電機(jī)-懸架系統(tǒng)模型示意圖
分布式電驅(qū)動車輛垂向動力學(xué)模型可表示為
(1)
式中:mb、mk和mw表示簧載質(zhì)量、車軸質(zhì)量和非簧載質(zhì)量;xb、xk、xw及其一階、二階導(dǎo)數(shù)分別表示簧載質(zhì)量、車軸質(zhì)量和非簧載質(zhì)量的垂向位移、垂向速度及垂向加速度;mr和ms為電機(jī)定子和轉(zhuǎn)子質(zhì)量,xs、xr及其一階和二階導(dǎo)數(shù)分別為電機(jī)定轉(zhuǎn)子的垂向位移、垂向速度及垂向加速度;xz為路面不平度輸入;ks、ksa和kt分別表示懸架剛度、軸承剛度以及輪胎剛度;kd和kb分別為吸振器剛度和輪轂軸承剛度;cs和Cd為懸架與吸振器阻尼;Fd為定轉(zhuǎn)子間隙變化產(chǎn)生的垂向不平衡徑向力。
1.2 開關(guān)磁阻電機(jī)模型
采用四相8/6極開關(guān)磁阻電機(jī),為表示開關(guān)磁阻電機(jī)的動態(tài)特性,需要對電機(jī)的電流、電感及位置進(jìn)行準(zhǔn)確描述。假設(shè)開關(guān)磁阻電機(jī)各相電磁參數(shù)及結(jié)構(gòu)對稱,則電機(jī)第k相的電動勢平衡方程為
(2)
式中:uk、ik、Rk分別表示k相繞組電壓、電流和電阻。ψk為k相磁鏈,可表示繞組電流與轉(zhuǎn)子位移角的函數(shù)。
ψk=ψ(i1,i2,…,iq;θ)
(3)
式中:q為定子相數(shù)。開關(guān)磁阻電機(jī)各相間互感遠(yuǎn)小于自感,忽略相間互感可得k相磁鏈方程

(4)
式中:Lk(ik,θ)是由轉(zhuǎn)子位置θ和繞組電流ik所表示的定子相自感,則式(2)可展開為

(5)
式中,ω表示轉(zhuǎn)子旋轉(zhuǎn)角速度。由式(5)可得定子繞組電流
(6)
由于每相電感是周期性的,且相電感的諧波分量遠(yuǎn)小于基波分量,因此可采用傅里葉級數(shù)的前3項(xiàng)來表示與轉(zhuǎn)子位置相關(guān)的相自感[10]。

L0(i)+L1(i)cos(Nrθ+φ1)+
L2(i)cos(2Nrθ+φ2)
(7)
式中:Nr為轉(zhuǎn)子極數(shù),φn代表第n次諧波量的相角且φn=nπ。L0(i)、L1(i)及L2(i)可表示為
(8)
式中:La(i)=L(0,i)表示極對齊位置電感,Lu(i)=L(π/Nr,i)表示未對齊電感,Lm(i)=L(π/2Nr,i)表示中間位置電感。由于在非對齊位置不存在飽和現(xiàn)象,因此Lu(i)可看作與電流無關(guān)的常數(shù),La(i)和Lm(i)可擬合為如下多項(xiàng)式[11]:
(9)
將式(8)和(9)代入式(7)中可得第k相電感
(10)
將式(10)代入式(4)可得到k相磁鏈方程
(11)
開關(guān)磁阻電機(jī)單相輸出的機(jī)械能可表示為

(12)
根據(jù)機(jī)電能量轉(zhuǎn)化,可得廣義電磁力Fk
(13)
對四相(8/6)極開關(guān)磁阻電機(jī)而言,其輸出的總廣義力為
(14)
式中,k=1,2,3,4分別表示不同相的力。x為廣義位移量,可代表轉(zhuǎn)子位置角位移θ、定轉(zhuǎn)子間氣隙lg、定子鐵片堆疊厚度lz,分別對應(yīng)于電機(jī)的電磁驅(qū)動力、徑向電磁力及軸向力。軸向力對車輛動力學(xué)影響較小,一般不予考慮,則電機(jī)電磁驅(qū)動力矩和徑向電磁力可表示為
(15)
由式(11)可知,忽略ik為分母的項(xiàng),k相磁鏈對轉(zhuǎn)子位置角位移θ的簡化偏微分方程為
(16)

將式(16)代入電磁驅(qū)動力矩方程(15)中,可得電機(jī)輸出扭矩為
(17)
假設(shè)定轉(zhuǎn)子間氣隙的垂直絕對位移為ε,忽略凸極邊緣磁通,SRM第k相繞組不平衡徑向電磁力為

(18)
式中:Tk為k相繞組驅(qū)動力矩;lg和δ為定轉(zhuǎn)子間隙及其凸極的重合角;βk為定子和轉(zhuǎn)子的凸極重合時極軸與y軸之間的夾角。對四相開關(guān)磁阻電機(jī),該角度可以表示為βk=(k-1)π/2,k=1,2,3,4。則不平衡徑向力之和可表示為
(19)
不平衡徑向力、轉(zhuǎn)角和電流之間的關(guān)系如圖2所示。由圖2可知,偏心和相電流越大,開關(guān)磁阻電機(jī)產(chǎn)生的不平衡徑向力就越大。
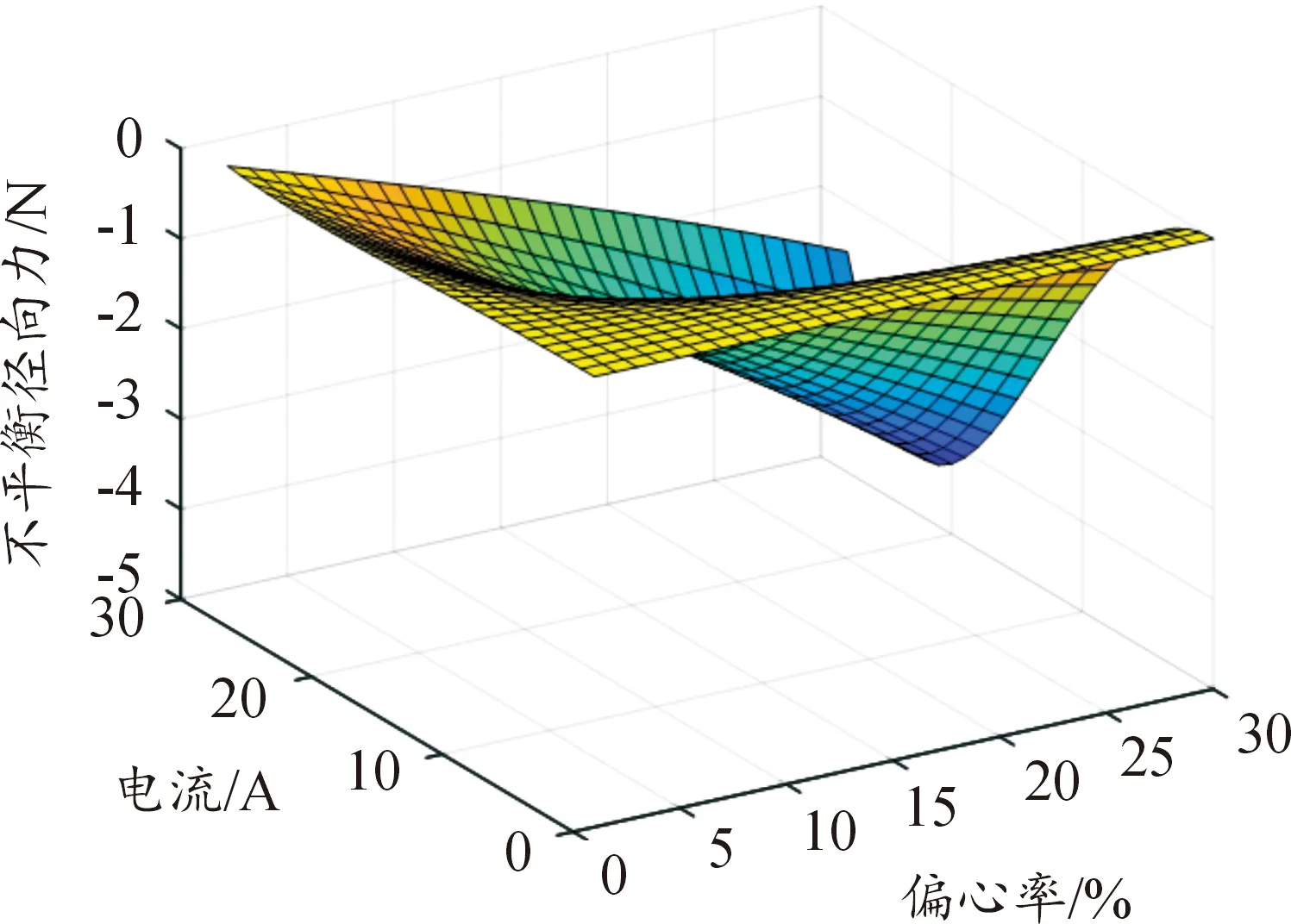
圖2 開關(guān)磁阻電機(jī)不平衡徑向力、轉(zhuǎn)角和 電流之間的關(guān)系曲面
2 懸架與動力吸振器參數(shù)匹配
2.1 問題描述
為實(shí)現(xiàn)懸架和動力吸振器的最優(yōu)參數(shù)匹配,選取簧載質(zhì)量加速度、輪胎動位移和定轉(zhuǎn)子間隙作為優(yōu)化指標(biāo),單輪激勵下的最優(yōu)目標(biāo)函數(shù)為
(20)
式中:X代表優(yōu)化變量,包括懸架和吸振器參數(shù);JΩ(X)為工作區(qū)間Ω內(nèi)的適應(yīng)度函數(shù);facc(X)、ftd(X)和fmgd(X)分別為簧載質(zhì)量加速度、輪胎動位移和定轉(zhuǎn)子間隙。
上述優(yōu)化目標(biāo)函數(shù)主要針對單一路面輸入,為使車輛在不同路面激勵下均獲得最優(yōu)性能,需綜合考慮多種路面不平度下的參數(shù)匹配。選取典型的B、C、D級路面為模型干擾輸入進(jìn)行優(yōu)化匹配,車速為60 km/h,車輛總行駛時間為30 s,分別在B、C、D級道路上行駛10 s,如圖3所示。
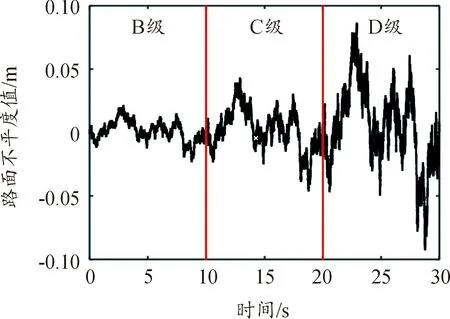
圖3 不同路面類型的粗糙度值曲線
多路面輸入下最優(yōu)目標(biāo)函數(shù)可表示為
(21)
式中:SΩ(X)為多種路面激勵下的適應(yīng)度值;JB(X)、JC(X)和JD(X)分別表示B、C、D級路面激勵下目標(biāo)函數(shù)(20)的值。通過加權(quán)系數(shù)可將以上多目標(biāo)優(yōu)化轉(zhuǎn)化為式(22)所示的單目標(biāo)優(yōu)化問題
(22)
采用上述歸一化方法,式(20)可表示為

(23)
式中:λi和wi為權(quán)重系數(shù),且λ1+λ2+λ3=1,w1+w2+w3=1。為了降低懸架撞到限位塊的概率,懸架動行程約束應(yīng)滿足σ(fsd)/|fsd|≤1/3。
2.2 布谷優(yōu)化算法
布谷優(yōu)化是一種模擬布谷鳥尋巢產(chǎn)卵行為的全局搜索方法,具有參數(shù)少、實(shí)現(xiàn)簡單等優(yōu)點(diǎn),其穩(wěn)定性和收斂速度均優(yōu)于遺傳算法和粒子群算法[12]。布谷優(yōu)化的基本流程如圖4所示。
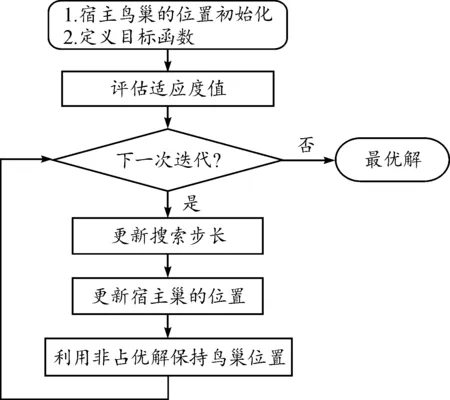
圖4 布谷優(yōu)化流程框圖
布谷鳥在尋巢飛行過程中表現(xiàn)出萊維飛行特性,布谷優(yōu)化通過結(jié)合局部和全局隨機(jī)游走策略可有效擴(kuò)大搜索范圍,增加種群多樣性。局部隨機(jī)游走可表示為

(24)
(25)
α>0為步長比例因子,萊維隨機(jī)數(shù)L(λ)可表示為
(26)
式中:u和v服從標(biāo)準(zhǔn)正態(tài)分布;s表示步長;β∈[0,1],φ值為
(27)

為揭示懸架和動力吸振器參數(shù)與路面輸入之間的關(guān)系,選擇鳥巢個數(shù)為200,迭代次數(shù)為100。單一路面激勵目標(biāo)函數(shù)權(quán)重為w1=0.5,w2=0.3,w3=0.2,其中乘坐舒適性為主要優(yōu)化目標(biāo)。多路面激勵目標(biāo)函數(shù)權(quán)重值均為1/3,表示3種不同路面輸入下優(yōu)化目標(biāo)相同。布谷優(yōu)化迭代過程如圖5所示。由圖5可知,搜索過程在20代內(nèi)收斂到最終的適應(yīng)度值。
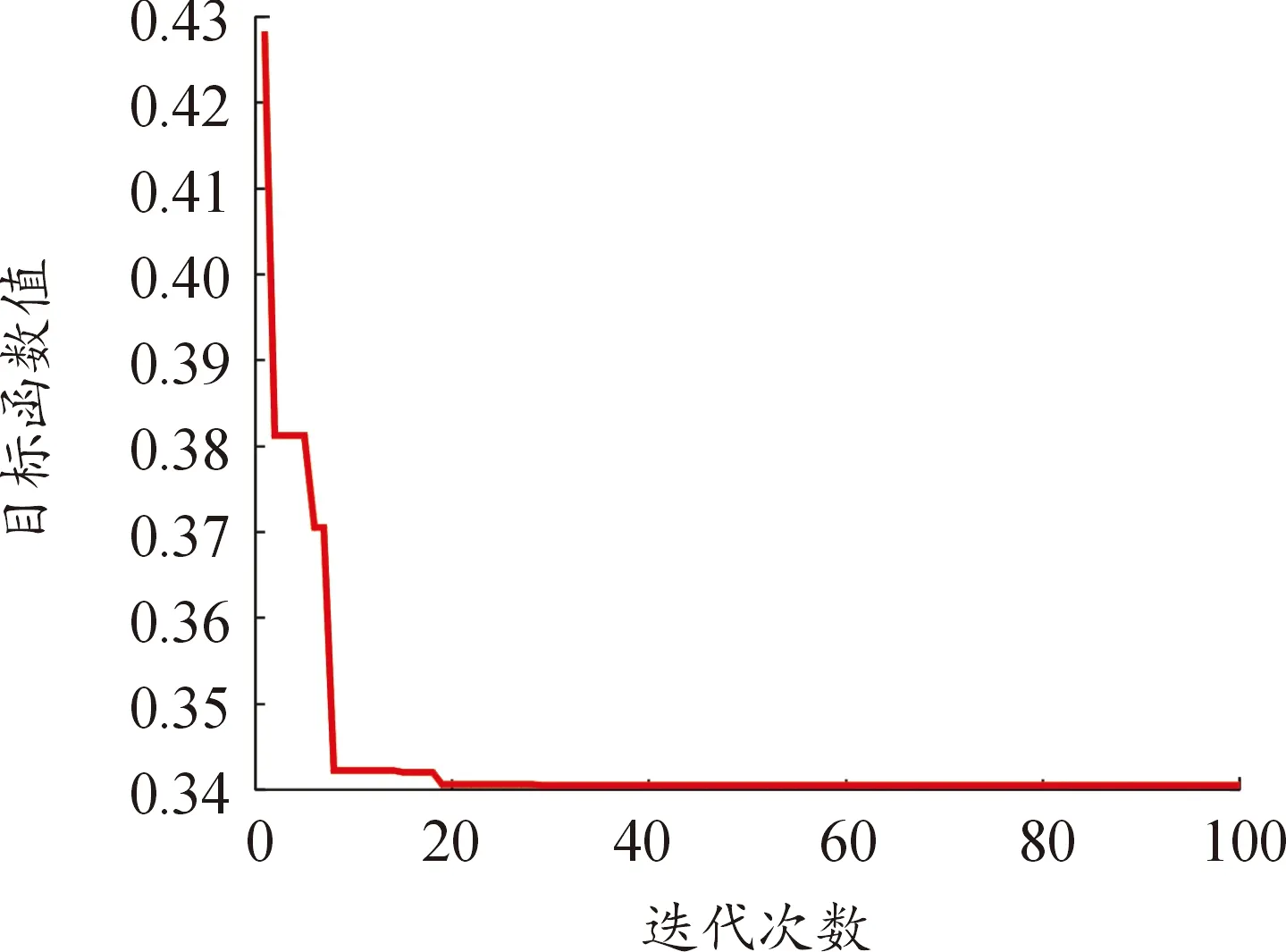
圖5 布谷優(yōu)化算法進(jìn)化過程
3 混合半主動控制器設(shè)計(jì)
考慮到電機(jī)懸架系統(tǒng)的特殊結(jié)構(gòu),控制器設(shè)計(jì)過程中需同時考慮路面激勵對簧載質(zhì)量加速度、輪胎動位移以及電機(jī)定轉(zhuǎn)子間隙變化的影響。因此,設(shè)計(jì)的混合控制器包含有2個假想的天棚阻尼和1個地棚阻尼,理想混合控制模型如圖6(a)所示,等效混合控制模型如圖6(b)所示。

圖6 輪轂電機(jī)懸架控制模型
包含有天棚和地棚阻尼的理想混合控制模型可表示為
(28)
式中:csky1、csky2和cgrd分別表示簧載質(zhì)量天棚阻尼系數(shù)、定子質(zhì)量天棚阻尼系數(shù)和地棚阻尼系數(shù),csp和cdp表示被動模型懸架和吸振器阻尼系數(shù)。可控阻尼安裝在懸架和吸振器減振器位置,且簧載質(zhì)量和定子質(zhì)量均受地棚阻尼系數(shù)的影響,因此等效混合控制方程可表示為
(29)
通過比較動力學(xué)方程(28)和(29),可得混合阻尼系數(shù)
(30)
由于天棚和地棚阻尼系數(shù)直接影響到控制器的控制效果,上述參數(shù)的獲取可描述為以提升平順性和操穩(wěn)性為目標(biāo),以懸架行程和定轉(zhuǎn)子間隙為約束的多目標(biāo)優(yōu)化問題:
利用文獻(xiàn)[13]中所述的多目標(biāo)優(yōu)化方法得到優(yōu)化的控制參數(shù),舒適性和操穩(wěn)性所對應(yīng)的帕累托前沿如圖7所示。
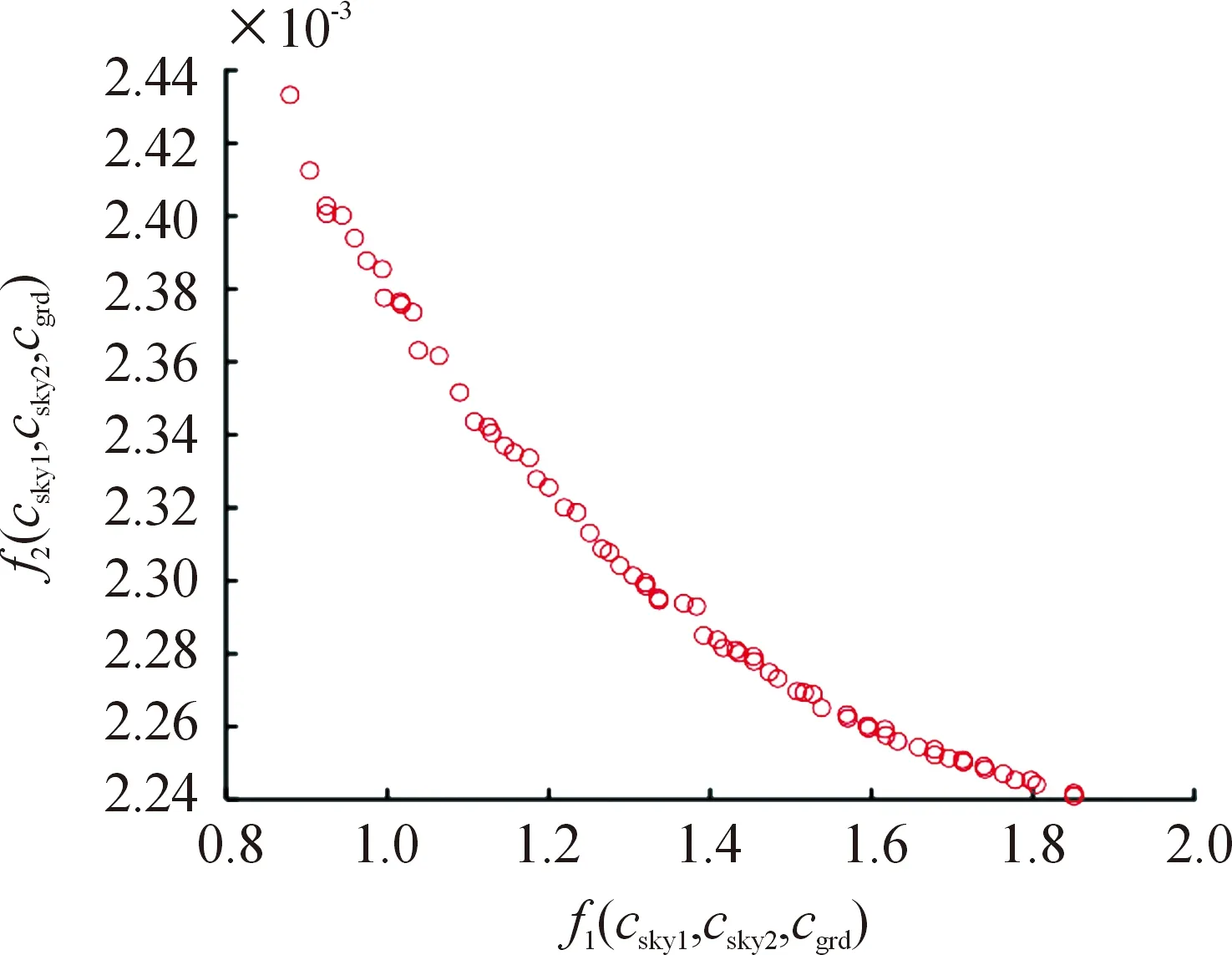
圖7 帕累托最優(yōu)解集
4 仿真分析
輪轂電機(jī)懸架模型參數(shù)如表1所示,系統(tǒng)性能指標(biāo)包括簧載質(zhì)量加速度(SMA)、懸架動行程(SD)、輪胎動位移(TD)和磁隙變形(MGD)。

表1 模型參數(shù)
4.1 參數(shù)優(yōu)化匹配
基于布谷優(yōu)化算法對懸架與吸振器參數(shù)進(jìn)行優(yōu)化匹配,優(yōu)化后的參數(shù)如表2所示。
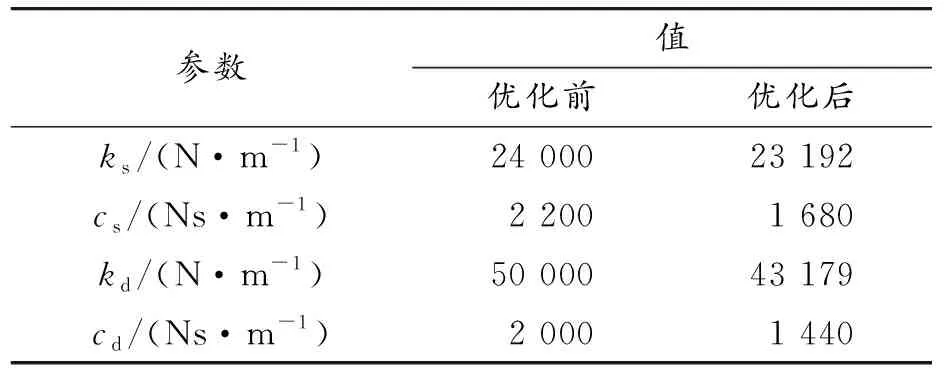
表2 優(yōu)化結(jié)果
優(yōu)化前后3種典型路面激勵時域響應(yīng)如圖8所示。由圖8可觀察到,系統(tǒng)響應(yīng)隨著道路等級增加而增加。優(yōu)化后的簧載質(zhì)量加速度、輪胎動位移和磁隙變形時域幅值較優(yōu)化前有所減小,表明經(jīng)過優(yōu)化的車輛舒適性、操穩(wěn)性有所提升,且由電機(jī)定轉(zhuǎn)子間隙變化引起的徑向力減小。優(yōu)化后的懸架動行程較優(yōu)化前有一定的增加,但均能滿足不同路面下的約束要求。

圖8 優(yōu)化前后輪轂電機(jī)懸架系統(tǒng)響應(yīng)曲線
優(yōu)化前后系統(tǒng)響應(yīng)均方根值如表3所示。由表3可看出,B、C、D級路面激勵下,優(yōu)化后的簧載質(zhì)量加速度、輪胎動位移、磁隙變形均方根值都有一定程度地減小,其中磁隙變形均方根值減小最為顯著,其次為簧載質(zhì)量加速度和輪胎動位移。B、C、D級路面激勵下磁隙變形分別減小了13%、12.9%和13.4%,簧載質(zhì)量加速度分別減小了9.3%、9.32%和11.2%。3種路面激勵下振動響應(yīng)性能提升表現(xiàn)出相似性,這與多路面激勵優(yōu)化目標(biāo)函數(shù)的權(quán)重選取有關(guān)。
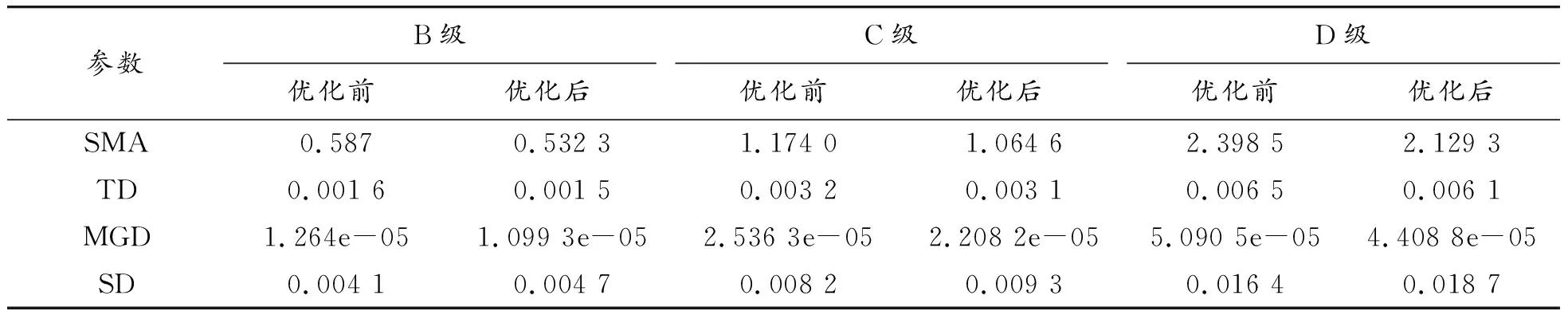
表3 優(yōu)化前后響應(yīng)均方根值
4.2 混合控制效果分析
為更直觀地顯示混合半主動控制的效果,以C級路面激勵下混合控制和被動模型的動態(tài)響應(yīng)進(jìn)行對比,車速為60 km/h。優(yōu)化得到的半主動控制參數(shù)csky1、csky2和cgrd分別為2 272、927、204 N/s,被動模型阻尼參數(shù)csp和cdp分別為800、800 N/s。輪轂電機(jī)懸架系統(tǒng)時域響應(yīng)如圖9所示。
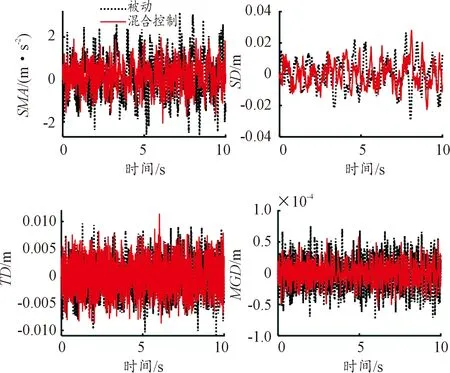
圖9 系統(tǒng)時域響應(yīng)曲線
圖9中混合控制器的簧載質(zhì)量加速度和磁隙位移與被動系統(tǒng)相比顯著降低,表明混合控制器可有效提升乘坐舒適性,減小路面激勵對電機(jī)定轉(zhuǎn)子間隙變化的影響。與被動模型相比,懸架動行程和輪胎動位移均有所減小,在保持懸架行程約束的同時提升了車輛的操穩(wěn)性。
混合控制與被動系統(tǒng)響應(yīng)均方根值如表4所示。由表4可知,采用混合控制的輪轂電機(jī)懸架系統(tǒng)簧載質(zhì)量加速度均方根值減小了34.79%,輪胎動位移均方根值減小了6.45%,即車輛的平順性和操穩(wěn)性得到提升。懸架動行程和定轉(zhuǎn)子間隙都在約束范圍之內(nèi),且二者相較于被動系統(tǒng)分別提升了10.75%和25.81%,即采用混合控制可有效提升車輛垂向性能,且改善了電機(jī)的工作環(huán)境。
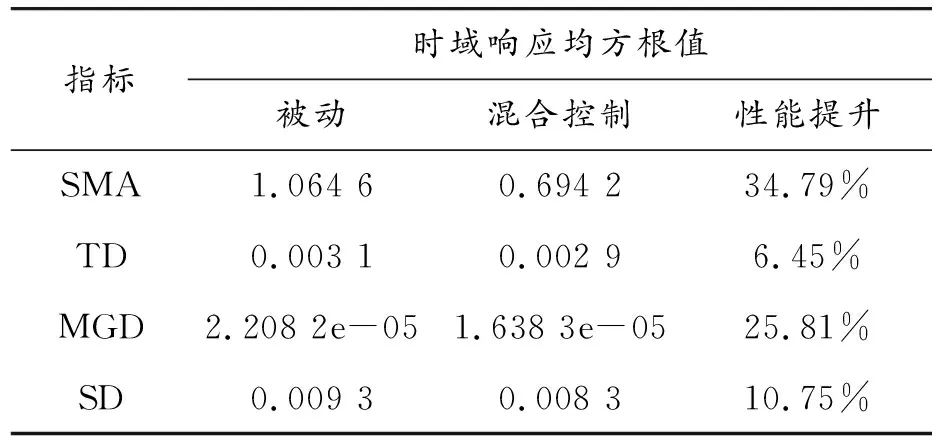
表4 響應(yīng)均方根值
為進(jìn)一步驗(yàn)證混合控制器的性能,對輪轂電機(jī)懸架系統(tǒng)頻域響應(yīng)進(jìn)行分析,如圖10所示。
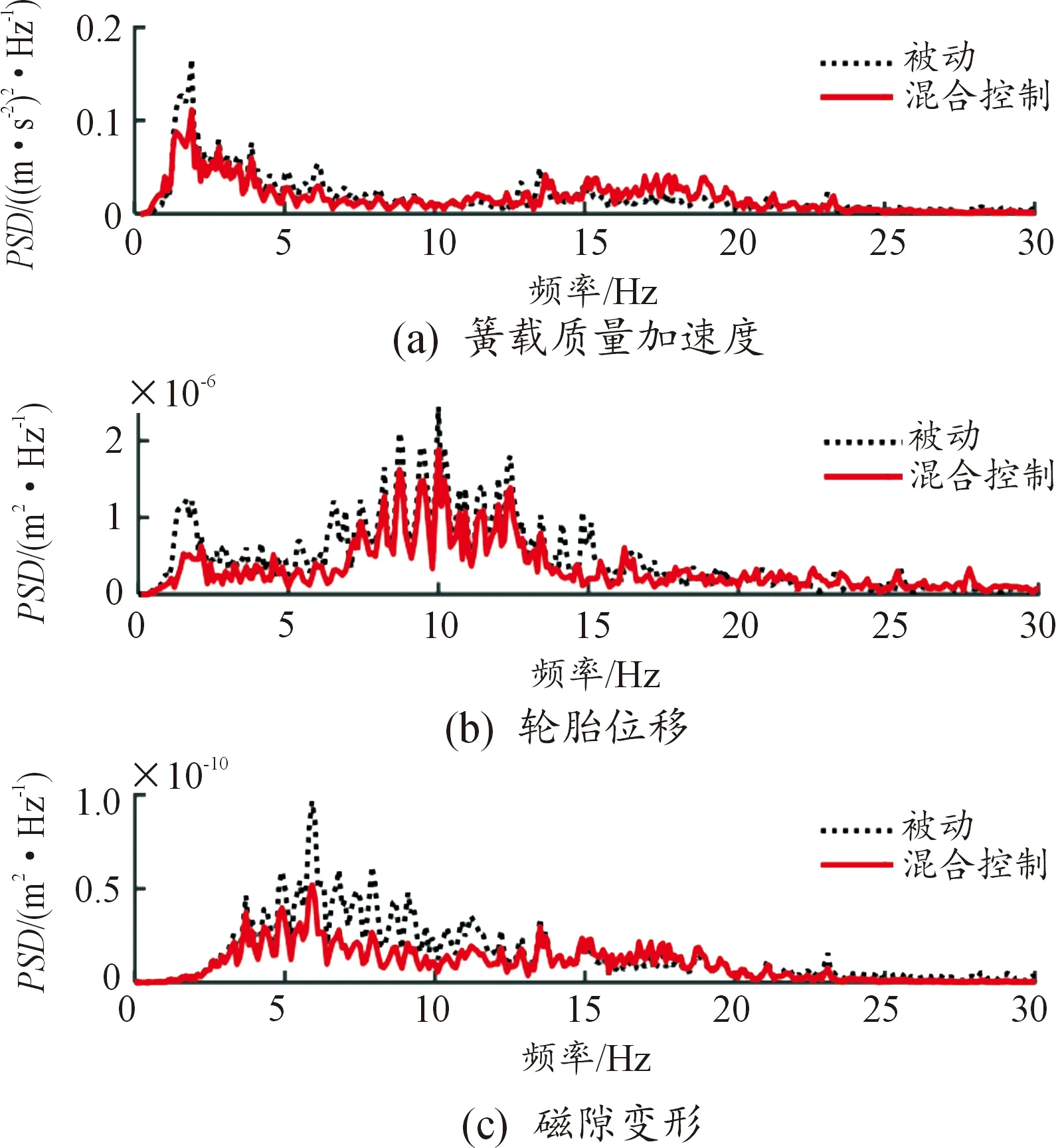
圖10 系統(tǒng)頻域響應(yīng)曲線
由圖10(a)可看出,采用混合控制器可減小簧載質(zhì)量在固有頻率附近的幅值;由圖10(b)輪胎動位移頻域響應(yīng)可看出,半主動和被動系統(tǒng)在高頻范圍內(nèi)表現(xiàn)出相似的特性,但半主動系統(tǒng)在固有頻率附近幅值有一定的減小;圖10(c)表明,采用混合控制器的磁隙變形在低頻和中頻范圍內(nèi)幅值均小于被動模型,可減小不平衡徑向力對垂向系統(tǒng)的影響。由上述分析可知,頻域系統(tǒng)響應(yīng)與時域響應(yīng)結(jié)果保持一致,驗(yàn)證了所提出混合控制方法的有效性。
5 結(jié)論
1) 通過懸架與動力吸振器的優(yōu)化匹配,可提升系統(tǒng)在多種典型路面激勵下的性能。
2) 所設(shè)計(jì)的混合控制器可進(jìn)一步改善電動車的乘坐舒適性、操縱穩(wěn)定性及電機(jī)磁性變形等方面的垂向性能。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
中學(xué)生數(shù)理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
中學(xué)生數(shù)理化·中考版(2020年10期)2020-11-27 01:59:48
中國生殖健康(2019年2期)2019-08-23 08:12:08
產(chǎn)品可靠性報告(2017年7期)2017-09-05 09:49:12
汽車觀察(2016年3期)2016-02-28 13:16:26
