應(yīng)用模糊規(guī)則的燃料電池水管理容錯(cuò)控制
2022-06-18 02:13:40霍為煒
關(guān)鍵詞:故障
張 寧,霍為煒,孫 超,任 強(qiáng)
(1.北京信息科技大學(xué) 機(jī)電工程學(xué)院,北京 100192;2.北京電動(dòng)車輛協(xié)同創(chuàng)新中心, 北京 100192; 3.北京理工大學(xué) 電動(dòng)車輛國(guó)家工程研究中心, 北京 100081; 4.廣州汽車集團(tuán)股份有限公司, 廣州 510623)
0 引言
水管理故障是燃料電池最常發(fā)生的故障,包含水淹故障和膜干故障。水淹故障會(huì)使流道和氣體擴(kuò)散層表面的液態(tài)水不能氣化或及時(shí)排出而積聚,阻礙氣體進(jìn)入催化劑層,電化學(xué)反應(yīng)不能順利進(jìn)行,導(dǎo)致電堆輸出電壓降低[1]。發(fā)生膜干故障時(shí)電堆缺水導(dǎo)致膜電導(dǎo)率下降,歐姆阻抗增加,使正在運(yùn)行的燃料電池產(chǎn)熱增加,導(dǎo)致更嚴(yán)重的膜干,甚至膜撕裂[2]。因此,膜干和水淹故障對(duì)燃料電池內(nèi)部結(jié)構(gòu)以及輸出性能有不可逆的損害,極大程度地影響了燃料電池壽命。
容錯(cuò)控制通過(guò)考慮故障診斷來(lái)定義控制動(dòng)作,系統(tǒng)發(fā)生故障時(shí)仍能在控制下保持穩(wěn)定運(yùn)行,并滿足一定的性能指標(biāo)[3],包括主動(dòng)型容錯(cuò)控制和被動(dòng)型容錯(cuò)控制[4]。被動(dòng)型容錯(cuò)控制僅考慮一種預(yù)定義的故障,控制參數(shù)或者控制律不會(huì)隨著故障的發(fā)生而調(diào)整,其計(jì)算速度快,沒(méi)有故障診斷模塊和決策模塊[5-6]。主動(dòng)容錯(cuò)控制包含故障診斷模塊、決策模塊和控制重構(gòu)模塊,根據(jù)故障來(lái)改變控制律或控制參數(shù),比被動(dòng)型容錯(cuò)控制具有更好的可靠性和魯棒性[7]。
目前,已經(jīng)有大量關(guān)于燃料電池故障診斷和燃料電池控制的研究[8]。Pei等[9]詳細(xì)地闡述了壓力降對(duì)水淹故障的影響機(jī)理,從6個(gè)方面對(duì)基于壓降的水淹故障診斷進(jìn)行了綜述。Barbir等[10]提出陰極壓力降是燃料電池水淹故障的可靠指標(biāo),膜阻抗是燃料電池膜干的可靠指標(biāo)。Pukrushpan等[11]通過(guò)控制空壓機(jī)的電壓來(lái)實(shí)現(xiàn)燃料電池堆陰極中過(guò)氧比的穩(wěn)定,在電流需求階躍變化時(shí)仍能提供充足的氧氣保證燃料電池正常運(yùn)行。Matraji等[12]用級(jí)聯(lián)結(jié)構(gòu)的魯棒非線性二階滑模控制器來(lái)控制進(jìn)入燃料電池的空氣流量,以保證燃料電池最佳功率輸出,最后通過(guò)硬件在環(huán)仿真驗(yàn)證了控制器的性能。Meidanshahi等[13]為了獲得電池的最佳性能和最高功率密度,使用差分進(jìn)化算法在穩(wěn)態(tài)條件下優(yōu)化了操作參數(shù),并基于所提出的模型和優(yōu)化的參數(shù),提出了一種合適的模糊控制器。
針對(duì)燃料電池的水淹和膜干故障搭建了容錯(cuò)控制策略,在故障開(kāi)始發(fā)生時(shí)采取有效措施,使系統(tǒng)快速恢復(fù)到健康狀態(tài)。
1 燃料電池模型
在硬件在環(huán)測(cè)試系統(tǒng)(hardware-in-the-loop,HIL)平臺(tái)上對(duì)所提出算法進(jìn)行驗(yàn)證,采用燃料電池物理模型模擬真實(shí)燃料電池,如圖1所示。燃料電池包括空氣供給系統(tǒng)、氫氣供給系統(tǒng)、冷卻系統(tǒng)和電堆。
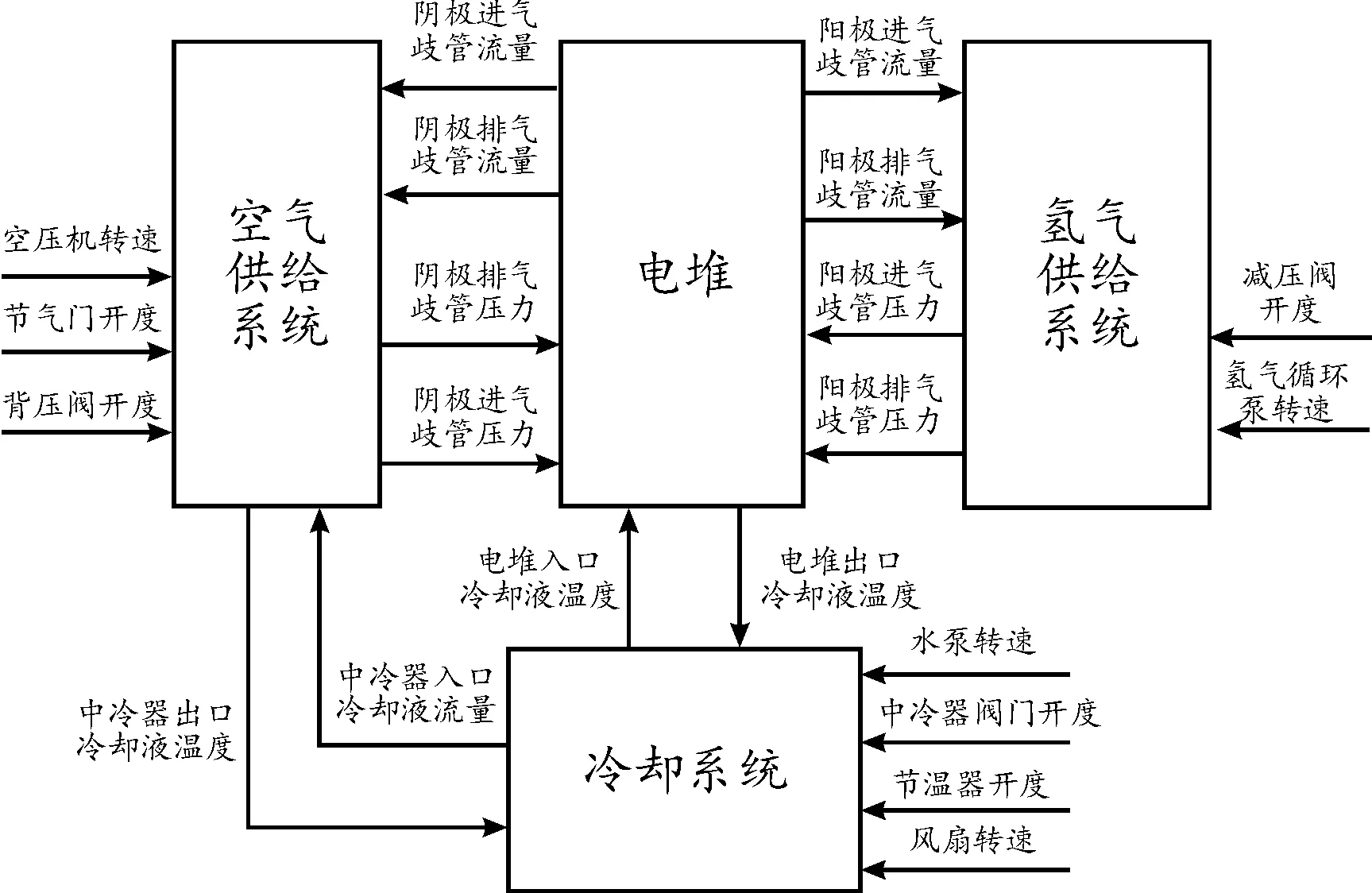
圖1 HIL中燃料電池模型框圖
在空氣供給系統(tǒng)中,空氣經(jīng)空壓機(jī)、中冷器和加濕器達(dá)到合適壓力、流量、溫度和濕度進(jìn)入電堆發(fā)生反應(yīng)。氫氣供給系統(tǒng)負(fù)責(zé)向電堆提供合適的壓力、流量和濕度的氫氣。在電堆模塊中,陽(yáng)極氫氣在催化劑的作用下轉(zhuǎn)換成氫離子穿過(guò)質(zhì)子交換膜與陰極氧氣發(fā)生電化學(xué)反應(yīng),為負(fù)載提供電能。冷卻系統(tǒng)負(fù)責(zé)整個(gè)燃料電池發(fā)動(dòng)機(jī)的溫度保持恒定狀態(tài)。
電堆的輸出電壓由開(kāi)路電壓減去活化損失和歐姆損失得到[14],按下式計(jì)算:

(1)
式中:Eoc為開(kāi)路電壓,N為電堆單體數(shù)量,A為塔菲爾斜率,i0為交換電流,Td為電壓終值是95%時(shí)的響應(yīng)時(shí)間,Rohm為電堆內(nèi)阻,ifc為電堆電流。
電堆的開(kāi)路電壓按下式計(jì)算:
Eoc=Kc·En
(2)
式中:Kc為額定工況下的電壓常數(shù),En為能斯特電壓。
能斯特電壓按下式計(jì)算:
(3)
式中:T為電堆溫度,z為移動(dòng)電子數(shù),F(xiàn)為法拉第常數(shù),R為氣體常數(shù),PH2為氫氣分壓,PO2為氧氣分壓。
電堆出口氣體流量是影響電堆陰極水量的重要因素,也是本文的主要控制對(duì)象,電堆陰極入口和出口流量按下式計(jì)算:
W=k(Pup-Pdown)
(4)
式中:k為孔口系數(shù),Pup為上游壓力,Pdown為下游壓力。
陰極的氧氣和陽(yáng)極的氫氣進(jìn)入電堆后會(huì)發(fā)生電化學(xué)反應(yīng)產(chǎn)生水,由法拉第定律可知,陰極產(chǎn)水量為:
(5)
式中:MH2O為水的摩爾質(zhì)量。
2 容錯(cuò)控制策略
Lebreton等[15]提到,一般燃料電池水淹時(shí)用氫氣吹掃會(huì)對(duì)膜造成壓力沖擊,不應(yīng)頻繁進(jìn)行,且電化學(xué)反應(yīng)產(chǎn)生的水最先出現(xiàn)在陰極。所以,本文通過(guò)改變陰極出口氣體流量,在燃料電池發(fā)生故障時(shí)及時(shí)控制,避免造成不可逆的損失。
模糊控制是一種基于規(guī)則的控制,能對(duì)時(shí)變的非線性復(fù)雜系統(tǒng)和無(wú)法有效獲得精確描述的系統(tǒng)給出有效的控制。相較于傳統(tǒng)PID控制,模糊控制調(diào)節(jié)時(shí)間更短,超調(diào)量更小,具有更高的魯棒性。
故障診斷模塊通過(guò)判斷燃料電池的輸出電壓和陰極壓力降診斷燃料電池當(dāng)前的故障狀態(tài)[16]。決策模塊由當(dāng)前的故障狀態(tài)得到背壓閥開(kāi)度的修正系數(shù),控制模塊將燃料電池陰極壓力和背壓閥開(kāi)度的修正值作為輸入,利用模糊控制的方法計(jì)算出合適的背壓閥開(kāi)度,控制陰極出口氣體流量,從而緩解膜干或水淹故障,使燃料電池運(yùn)行至健康狀態(tài)。另外,為避免陰陽(yáng)極壓差過(guò)大導(dǎo)致膜變形或穿孔,陽(yáng)極理想壓力由傳感器檢測(cè)到的陰極實(shí)際壓力增加10 kPa得到,由噴氫閥根據(jù)理想陽(yáng)極壓力和實(shí)際陽(yáng)極壓力進(jìn)行控制。圖2為燃料電池容錯(cuò)控制結(jié)構(gòu)。
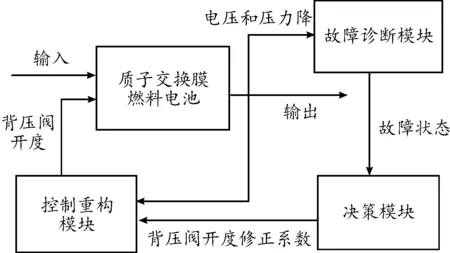
圖2 燃料電池容錯(cuò)控制結(jié)構(gòu)框圖
2.1 故障診斷模塊
發(fā)生水淹故障時(shí),燃料電池輸出電壓會(huì)下降,陰極壓力降會(huì)增大;而發(fā)生膜干時(shí),輸出電壓降低,陰極壓力降無(wú)明顯變化[1]。
本文首先將燃料電池的輸出電壓與當(dāng)前功率燃料電池的理想輸出電壓作比較,如果超出正常范圍,說(shuō)明此時(shí)燃料電池有故障。接著將陰極的進(jìn)出口壓力降與此時(shí)功率需求下正常壓力降對(duì)比,若是超出正常范圍,則為水淹故障,若是在正常范圍內(nèi),則為膜干故障。圖3為燃料電池故障診斷示意圖。表1為燃料電池在健康狀態(tài)下不同功率所對(duì)應(yīng)的單電池電壓和陰極進(jìn)出口壓力降的值。
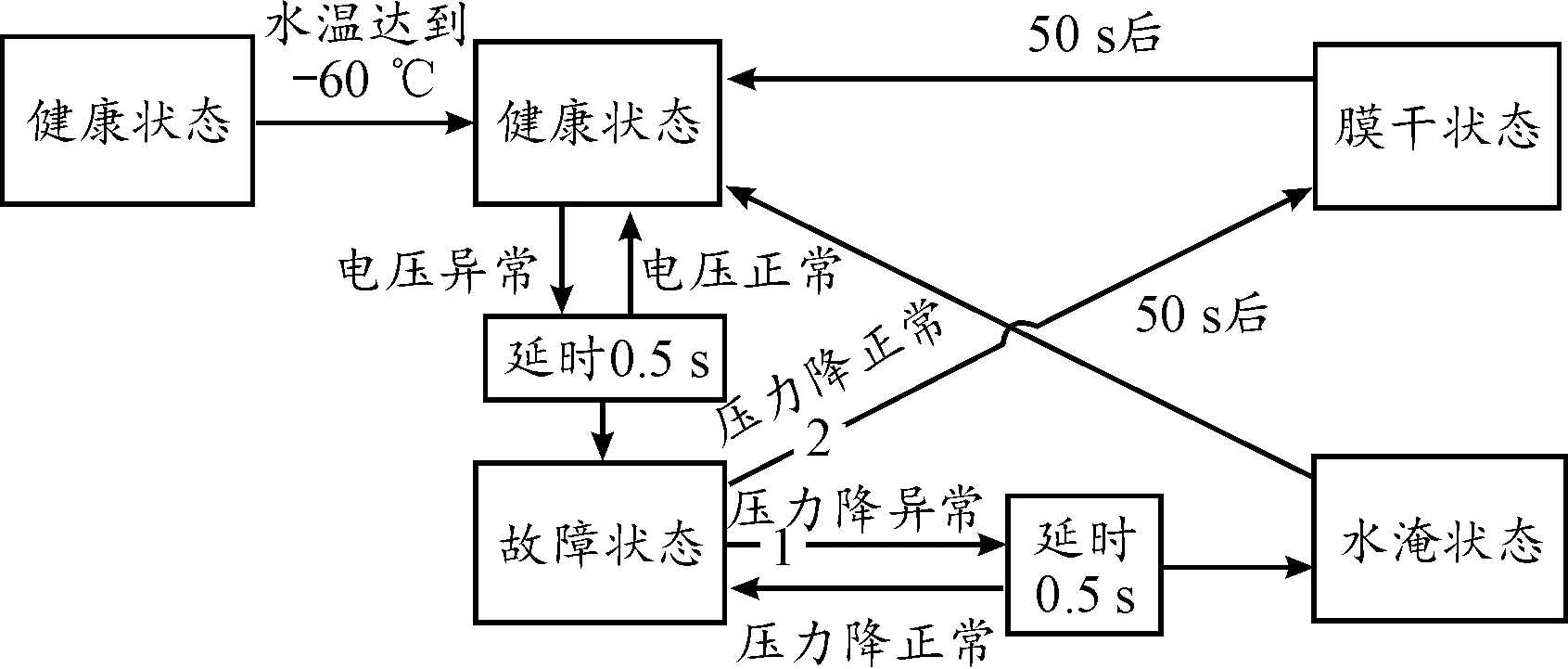
圖3 燃料電池故障診斷示意圖
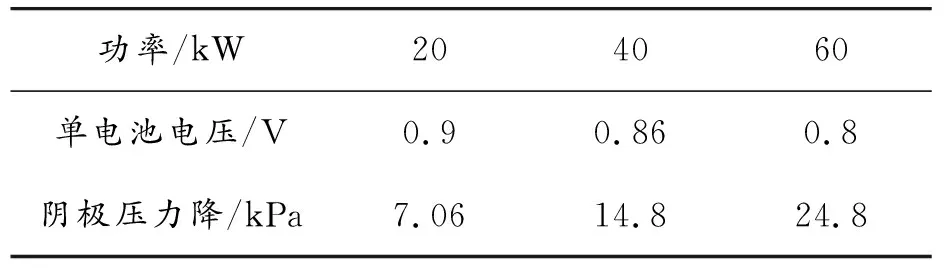
表1 燃料電池在健康狀態(tài)下不同功率所對(duì)應(yīng)的最佳單電池電壓和陰極進(jìn)出口壓力降
用stateflow對(duì)上述診斷進(jìn)行實(shí)現(xiàn),在由正常狀態(tài)判斷為故障狀態(tài)以及由故障狀態(tài)判斷為水淹狀態(tài)時(shí),都需延時(shí)0.5 s防止發(fā)生誤判。診斷為膜干或水淹故障后延時(shí)50 s,此時(shí)控制模塊改變背壓閥開(kāi)度,為陰極水量達(dá)到正常范圍留出充足的時(shí)間,50 s后重新對(duì)電壓以及陰極壓力降是否正常進(jìn)行判斷診斷出當(dāng)前的狀態(tài)。
2.2 決策模塊
決策模塊通過(guò)診斷模塊判斷得到的燃料電池當(dāng)前狀態(tài)來(lái)決策背壓閥的開(kāi)度修正值。燃料電池水淹時(shí)將背壓閥開(kāi)度的修正系數(shù)置為1,加大背壓閥開(kāi)度,從而用更快流速的空氣帶走多余的水使燃料電池恢復(fù)健康狀態(tài)。健康時(shí)背壓閥修正系數(shù)為0,背壓閥開(kāi)度保持不變。膜干時(shí)將背壓閥開(kāi)度的修正值系數(shù)為-1,減小背壓閥開(kāi)度來(lái)減小陰極出口氣體流量,帶走較少的水以保證膜的濕度促進(jìn)電化學(xué)反應(yīng)。
2.3 控制重構(gòu)模塊
采用模糊控制的方法,控制背壓閥開(kāi)度,通過(guò)車輛控制器(VCU)和燃料電池控制器(FCU)的請(qǐng)求功率查表得出陰極氣體壓力,得到模糊控制的一個(gè)輸入,另一個(gè)輸入為決策模塊得到的修正值。通過(guò)模糊邏輯得到合適的背壓閥開(kāi)度對(duì)燃料電池進(jìn)行控制。
燃料電池功率越大,陰極氣體壓力越大,所對(duì)應(yīng)的背壓閥開(kāi)度越大。在發(fā)生水淹故障時(shí),根據(jù)背壓閥開(kāi)度修正系數(shù)來(lái)適當(dāng)增大背壓閥開(kāi)度,加大陰極出口氣體流量,帶走更多的水來(lái)消除水淹故障。膜干時(shí),適當(dāng)減小背壓閥開(kāi)度,減小陰極出口流量。
陰極氣體壓力范圍為170~220 kPa,將其分為3個(gè)模糊子集,分別對(duì)應(yīng)S、M和L;修正系數(shù)-1、0和1分別對(duì)應(yīng)N、Z和P。將背壓閥開(kāi)度范圍定為20%~63%,將其開(kāi)度分為6個(gè)模糊子集,分別為SS、S、M、L、B和LB。功率越高,負(fù)載電流越大,產(chǎn)水量就越多,故需要背壓閥開(kāi)度也越大。經(jīng)過(guò)反復(fù)測(cè)試制定出模糊規(guī)則如表2所示,輸入輸出隸屬度函數(shù)如圖4所示。

表2 模糊控制規(guī)則
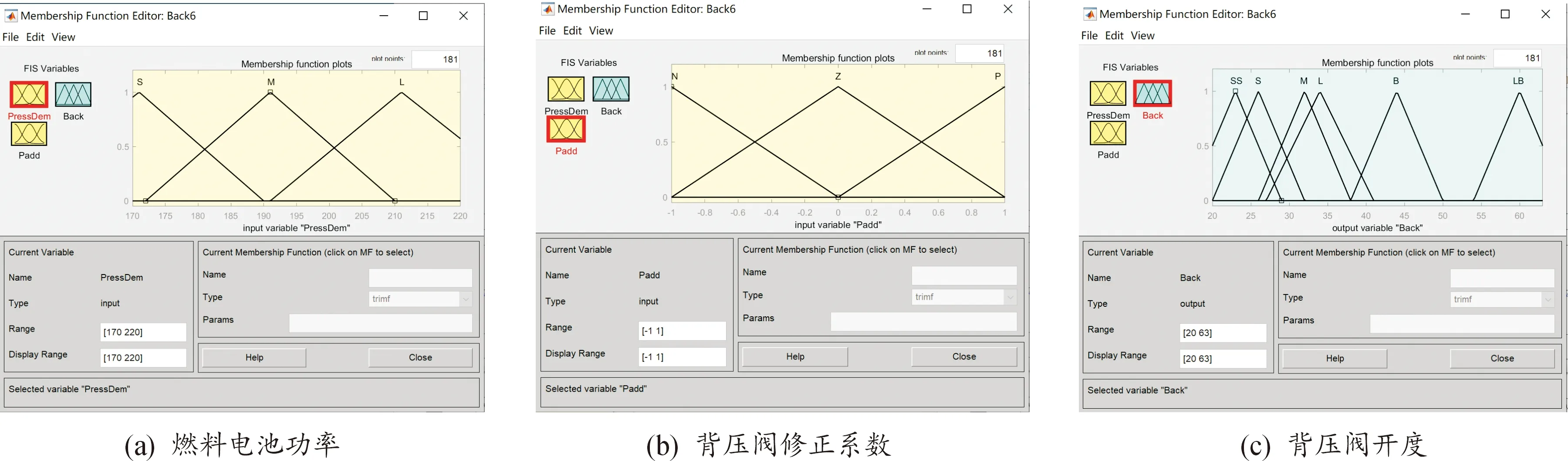
圖4 模糊控制隸屬度函數(shù)曲線
3 硬件在環(huán)仿真結(jié)果
通過(guò)HIL對(duì)所搭建的容錯(cuò)控制進(jìn)行測(cè)試。圖5為HIL機(jī)柜(SimCar-VCU&FCU)、上位機(jī)、控制器(MPC5743)和USBCAN的實(shí)物圖。USBCAN用來(lái)通訊,將其連接到電腦上可以用MeCa軟件實(shí)時(shí)觀測(cè)控制器中的數(shù)據(jù)變化, HIL機(jī)柜和上位機(jī)提供車輛模型實(shí)時(shí)運(yùn)行的仿真環(huán)境,模擬車輛各系統(tǒng)的物理行為,并對(duì)測(cè)試過(guò)程進(jìn)行實(shí)時(shí)監(jiān)控和在線調(diào)參。在上位機(jī)上對(duì)陰極水量進(jìn)行標(biāo)定模擬膜干和水淹故障,觀察背壓閥開(kāi)度的反應(yīng)來(lái)判斷容錯(cuò)控制效果。

圖5 硬件在環(huán)測(cè)試設(shè)備實(shí)物圖
3.1 膜干狀態(tài)
圖6為20、40和60 kW時(shí)燃料電池發(fā)生膜干時(shí)的陰極水量、背壓閥開(kāi)度、陰極出口流量以及電堆電壓的變化情況。如圖6所示,使陰極水量突然降低至正常范圍外,經(jīng)過(guò)1.1 s判斷,背壓閥迅速減小開(kāi)度,陰極出口流量降低,減少陰極氣體帶走的水量,陰極水量開(kāi)始增加,電堆電壓也隨之增加,直到變至正常范圍內(nèi),50 s后背壓閥開(kāi)度恢復(fù)正常。
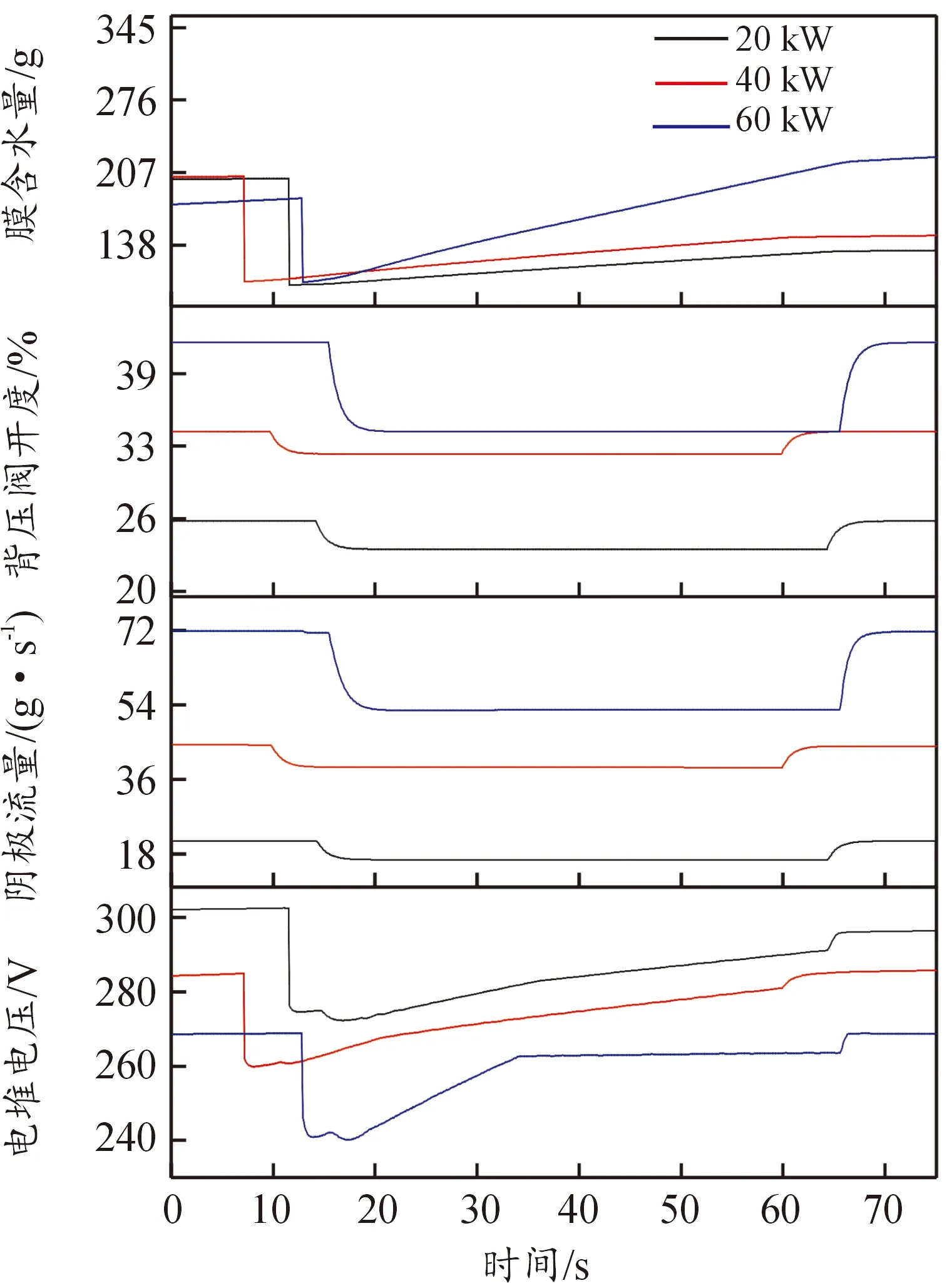
圖6 膜干狀態(tài)20、40和60 kW時(shí)各物理量變化曲線
在20 kW時(shí),電堆電壓并沒(méi)有恢復(fù)到膜干之前的電壓。因?yàn)椋谂袛喙收蠒r(shí)電壓不低于最優(yōu)電壓的95%就認(rèn)為是正常的,電壓的輸出本身也是一個(gè)變化的值,隨著陰極水量的緩慢增加,電壓也會(huì)逐漸變大。
在60 kW時(shí),電堆電壓提前達(dá)到正常狀態(tài),但陰極水量還在繼續(xù)增加。由圖3可知,判斷為水淹或膜干故障50 s后再重新判斷,所以背壓閥改變的時(shí)間是一定的,陰極水量達(dá)到正常的范圍即可。
在背壓閥開(kāi)度發(fā)生變化時(shí),電堆電壓有一個(gè)微小的跳動(dòng)。因?yàn)殡姸央妷号c陰極壓力和氧氣流量有關(guān),而背壓閥開(kāi)度會(huì)對(duì)這2個(gè)因素產(chǎn)生影響。
3.2 水淹狀態(tài)
圖7為在20、40 和60 kW時(shí)模擬水淹故障時(shí)陰極水量、背壓閥開(kāi)度、陰極出口流量和電堆電壓的變化情況。
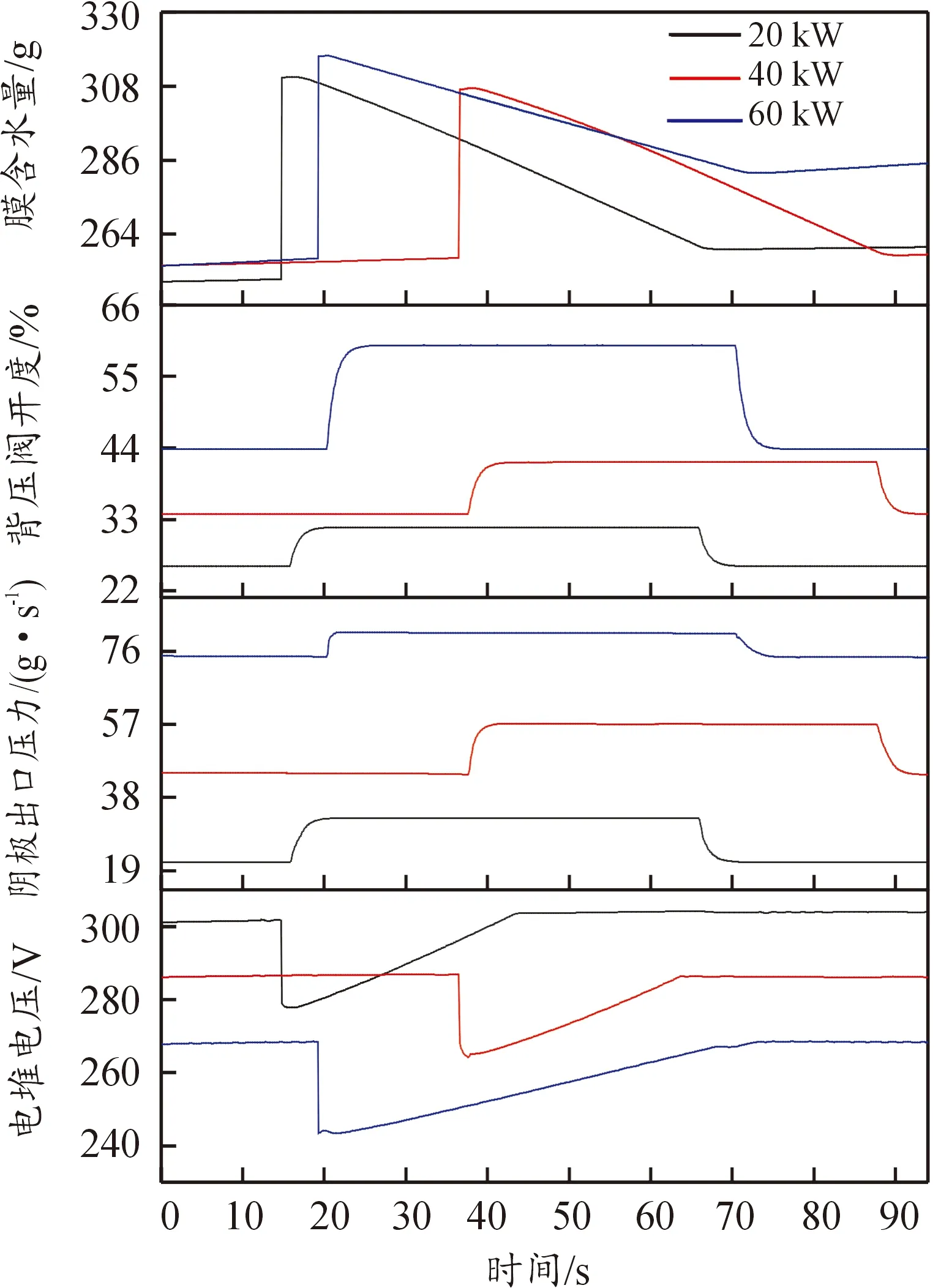
圖7 水淹狀態(tài)20、40和60 kW時(shí)各物理量變化曲線
由圖7可知,當(dāng)燃料電池功率為20 kW,在14.8 s時(shí)突然將陰極水量由250.5 g增多到 310.5 g,電堆電壓迅速?gòu)?01.8 V下降到277.7 V,背壓閥在15.9 s時(shí)開(kāi)始反應(yīng),經(jīng)過(guò)4.3 s背壓閥開(kāi)度由25.8%開(kāi)大到31.7%,陰極出口流量隨背壓閥開(kāi)度由21.2 g/s增至32.6 g/s,帶走更多的水,陰極水量開(kāi)始下降,電堆電壓開(kāi)始上升,在43 s時(shí),電壓升至303 V,此時(shí)背壓閥開(kāi)度依舊為31.7%。50 s后背壓閥開(kāi)度回到25.7%,陰極水量為259.8 g,在正常范圍內(nèi),燃料電池正常運(yùn)行。
功率較大時(shí),由于陰極壓力增大,背壓閥開(kāi)度也增大。電流隨功率的增大而增大,會(huì)加快陰極水量的增加,在60 kW時(shí)發(fā)生水淹背壓閥的開(kāi)度變化值比低功率時(shí)更大。此外,電堆輸出電壓隨功率增大而減小。
4 結(jié)論
針對(duì)燃料電池最常出現(xiàn)的膜干和水淹故障提出了一種容錯(cuò)控制策略,通過(guò)控制背壓閥的開(kāi)度來(lái)緩解膜干和水淹故障。提出了一種由陰極壓力降和輸出電壓診斷燃料電池膜干水淹故障的方法,設(shè)計(jì)了模糊控制器,有效計(jì)算出不同功率下3種燃料電池狀態(tài)的背壓閥開(kāi)度。在HIL平臺(tái)上驗(yàn)證了所搭建容錯(cuò)控制策略的有效性,并繪制了陰極水量、背壓閥開(kāi)度、陰極流量和電堆電壓隨時(shí)間變化曲線。結(jié)果表明,當(dāng)燃料電池發(fā)生膜干現(xiàn)象時(shí),背壓閥開(kāi)度快速減小,陰極出口氣體流量變小,減少帶走的水量,隨后陰極水量開(kāi)始增加,電堆電壓也隨陰極水量回升到正常范圍。當(dāng)燃料電池水淹時(shí),故障診斷模塊能夠檢測(cè)到單電池電壓和陰極壓力降是否超出了正常范圍,診斷為水淹故障,控制重構(gòu)模塊適當(dāng)增大背壓閥開(kāi)度,隨后陰極出口流量增大,減少陰極水量,電堆電壓逐漸恢復(fù)正常,經(jīng)過(guò)50 s背壓閥開(kāi)度恢復(fù)到無(wú)故障時(shí),燃料電池正常運(yùn)行。
猜你喜歡
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
鐵道通信信號(hào)(2016年4期)2016-06-01 12:10:19
電測(cè)與儀表(2016年5期)2016-04-22 01:13:50
汽車維修與保養(yǎng)(2015年12期)2015-04-18 07:51:49
汽車維修與保養(yǎng)(2015年8期)2015-04-17 03:32:52
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維修與保養(yǎng)(2015年7期)2015-04-17 02:12:40
汽車維修與保養(yǎng)(2015年2期)2015-04-17 01:30:34
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39
 重慶理工大學(xué)學(xué)報(bào)(自然科學(xué))2022年5期
重慶理工大學(xué)學(xué)報(bào)(自然科學(xué))2022年5期
- 重慶理工大學(xué)學(xué)報(bào)(自然科學(xué))的其它文章
- 一株產(chǎn)纖維素酶細(xì)菌B4的鑒定及發(fā)酵條件優(yōu)化
- 西部陸海新通道北部灣出海口岸通關(guān)效率評(píng)價(jià)
——基于結(jié)構(gòu)方程模型和模糊綜合評(píng)價(jià)法 - 點(diǎn)火參數(shù)對(duì)二沖程點(diǎn)燃式煤油機(jī)爆震影響研究
- 參照零模型的符號(hào)社會(huì)網(wǎng)絡(luò)嵌入性分析
- 融合多角度信息和圖卷積網(wǎng)絡(luò)的社交網(wǎng)絡(luò)節(jié)點(diǎn)分類模型
- Ce對(duì)含Sb的AZ80鎂合金鑄態(tài)顯微組織和拉伸性能的影響