基于物體自主識別的視覺式球形移動機器人系統(tǒng)研究
2022-11-01 05:37:42張佑春游志宇任遠林仲濟艷
黑龍江工業(yè)學院學報(綜合版) 2022年10期
張佑春,游志宇,任遠林,仲濟艷
(1.安徽工商職業(yè)學院應用工程學院,安徽合肥231131;2.西南民族大學電氣信息工程學院,四川成都610041)
球形機器人是驅(qū)動系統(tǒng)位于球殼內(nèi)部,通過內(nèi)驅(qū)動方式實現(xiàn)球體運動機器人。與傳統(tǒng)機械輪式機器人相比,具備了更出眾的運動能力和適應復雜地形能力。這類機器人具有良好的動靜平衡性,可以行駛在沙塵、潮濕、腐蝕性的惡劣環(huán)境中。球形機器人是機器人研究領域的熱點,但是基礎理論不夠完善,技術層面更處在起步階段。于濤等[1]設計的球形機器人利用角度動力守恒定律和陀螺儀驅(qū)動模式,完成了機器人移動控制功能。曾鵬[2]等利用了無線通信和雙驅(qū)動電機控制,完成了三種不同結(jié)構(gòu)機器人(BHQ-1、BHQ-2和BHQ-3)的設計。王曉云[3]利用視覺與IMU融合方法,對機器人姿態(tài)進行了修正,有效提高了精度。上述機器人成本較高,實用性有待進一步提升。
為了解決上述問題,設計了視覺式物體自主識別球形移動機器人系統(tǒng)。該系統(tǒng)通過機械結(jié)構(gòu)設計、控制電路設計和攝像頭圖像識別技術,完成了機器人自主平衡移動和物體自主識別等功能設計。該機器人具備遠程控制、成本低、功耗小和實用性強等優(yōu)點,具備一定的實用價值。
1 系統(tǒng)硬件設計
1.1 系統(tǒng)硬件電路設計
視覺式物體識別球形移動機器人系統(tǒng)硬件結(jié)構(gòu)主要包括了主控制器、陀螺儀角度采集、藍牙通信、圖像采集、電機驅(qū)動和電源等[4]。
(1)主控制器STM32F103模塊:它主要完成了多傳感器數(shù)據(jù)分析、融合和控制指令上傳與下發(fā)等功能。
(2)圖像采集傳感器模塊:該模塊采用了柯達公司的BPI-D1攝像頭,支持1080P高清視頻采集。它通過wifi直接將圖像數(shù)據(jù)傳輸至上位機,通過算法處理之后將分析結(jié)果傳輸至STM32F103,從而實現(xiàn)實時物體識別監(jiān)測。
(3)動力驅(qū)動模塊:它采用了中芯國際的TB6612控制芯片,驅(qū)動電流大小為1.2A,機器人驅(qū)動控制采用了4種模式靈活電驅(qū)切換。
(4)角度采集陀螺儀模塊:采用了I2C通信接口和STM32F103集成DMA功能,直接將機器人運動傾角數(shù)據(jù)快速傳輸至RAM中存儲。球形移動機器人系統(tǒng)硬件結(jié)構(gòu)設計如圖1所示。
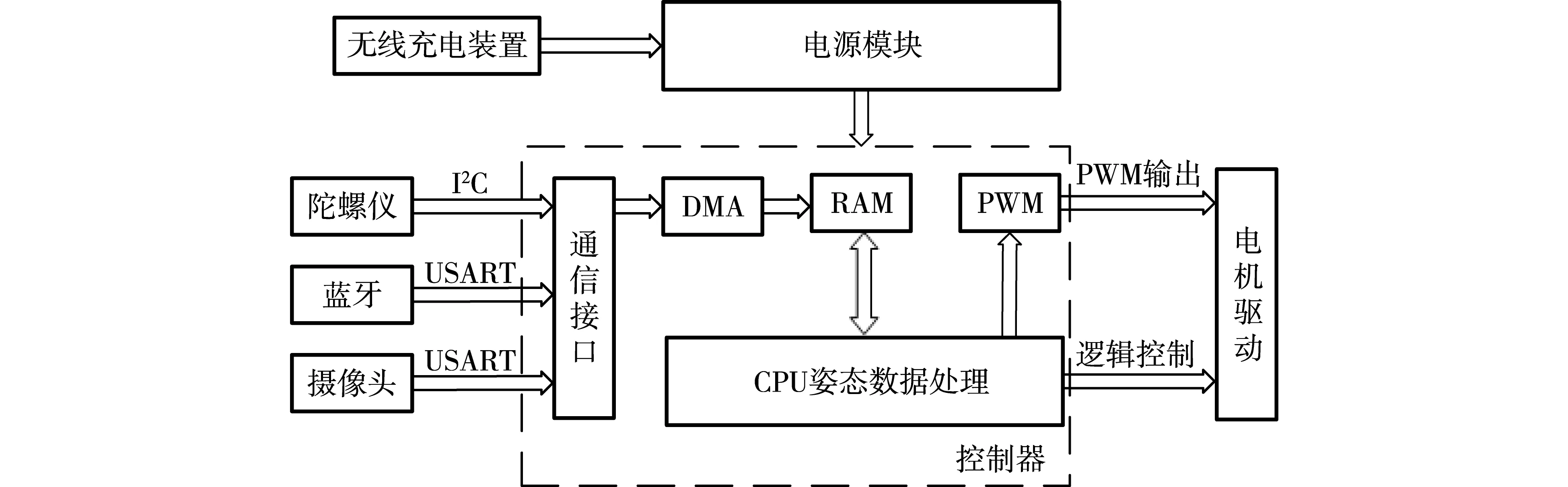
圖1 球形移動機器人系統(tǒng)硬件結(jié)構(gòu)
1.2 機器人機械構(gòu)造與運動原理
機器人機械構(gòu)造主要包括了三層結(jié)構(gòu)[5]:系統(tǒng)控制第一層,主要包括了主控芯片、各類傳感器和無線傳輸模塊等;電機驅(qū)動第二層,通過2對軸連接直流電機,完成機器人的驅(qū)動支撐;充電線圈第三層,當系統(tǒng)無電能支持時,利用電磁感應技術將機器人直接安裝充電底座上實現(xiàn)快速充電。機器人的運動原理如下:設球形機器人的初始重心為Q,驅(qū)動輪位置節(jié)點為M,機器人質(zhì)量值為m,Q與M之間的夾角角度值和距離值分別為θ和L,轉(zhuǎn)動慣量值為J。機器人內(nèi)部受力情況如圖2所示。
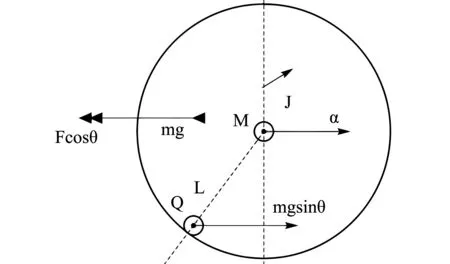
圖2 機器人內(nèi)部受力圖示
為了保持機器人在移動過程中重心平衡,平衡外力控制值設為F,機器人合外力力矩J等于傾角加速度α與轉(zhuǎn)動慣量L的乘積,θ為機器人運動的傾角夾角。機器人定軸移動方程式[6]如式(1)所示。
(1)
由于θ夾角值很小,設置sinθ≈θ,cosθ≈1定軸移動方程式近似如式(2)所示。
(2)
通過傅里葉變換,可得傳遞函數(shù)如式(3)所示。
(3)
2 系統(tǒng)自平衡PID控制算法設計
為了機器人移動過程能夠完成自平衡狀態(tài),需要將機器人的夾角角度值θ一直保持在期望值θ0附近。機器人系統(tǒng)采用了PID算法,將系統(tǒng)加入比例控制、積分控制和微分控制,通過陀螺儀MPU6050完成機器人姿態(tài)檢測,并將姿態(tài)角速度和角加速度通過卡爾曼濾波處理得到傾角估優(yōu)值[7]。然后,將期望傾角與最優(yōu)值進行姿態(tài)PID實時控制。最終,通過電機驅(qū)動,完成機器人自平衡運動狀態(tài)實時控制閉環(huán)系統(tǒng)設計。機器人自平衡狀態(tài)PID控制流程如圖3所示。
陀螺儀實時采集夾角值為θ1,θ2,…,θk,當前與期望值θ0的偏差值Ek如式(4)所示。
Ek=θk-θ0
(4)
夾角角度值與目標期望值歷史偏差為E1,E2,…,Ek,相鄰兩次差值Dk如式(5)所示[8]。
Dk=Ek-Ek-1
(5)
設比例系數(shù)為Kp,微分系數(shù)為Kd,由式(4)和式(5)可得PID姿態(tài)控制差分方程Q如式(6)所示。
Q=KpEk+KdDk
(6)
電機驅(qū)動死區(qū)設置為Sq,PWM輸出上限設為Qmax,電機驅(qū)動PWM最終輸出值Q如式(7)所示[9]。
(7)
3 系統(tǒng)軟件設計
機器人系統(tǒng)上電后,通過主控制器STM32F103完成陀螺儀MPU6050、藍牙通信、電機和BDI-P的系統(tǒng)初始化功能。MPU6050采集到夾角角度數(shù)據(jù)(角速度與角加速度)后,通過卡爾曼濾波處理和PID姿態(tài)控制完成機器人自平衡和圖像采集與處理,同時通過藍牙通信與控制指令解析,完成機器人執(zhí)行相應指令動作[10]。機器人系統(tǒng)軟件總體流程設計如圖4所示。STM32F103主控制器通過控制指令實現(xiàn)機器人移動功能的電機驅(qū)動,將陀螺儀實時采集的角速度和角加速度數(shù)據(jù)進行PID姿態(tài)自平衡計算,藍牙負責指令無線通信互傳,BDI-PI攝像頭通過wifi模塊將數(shù)據(jù)傳至上位機,上位機完成物體圖像識別算法處理后通過藍牙發(fā)送至STM32F103主控制器[11-12]。機器人自平衡控制流程如圖5所示。

圖4 機器人系統(tǒng)軟件總體流程設計
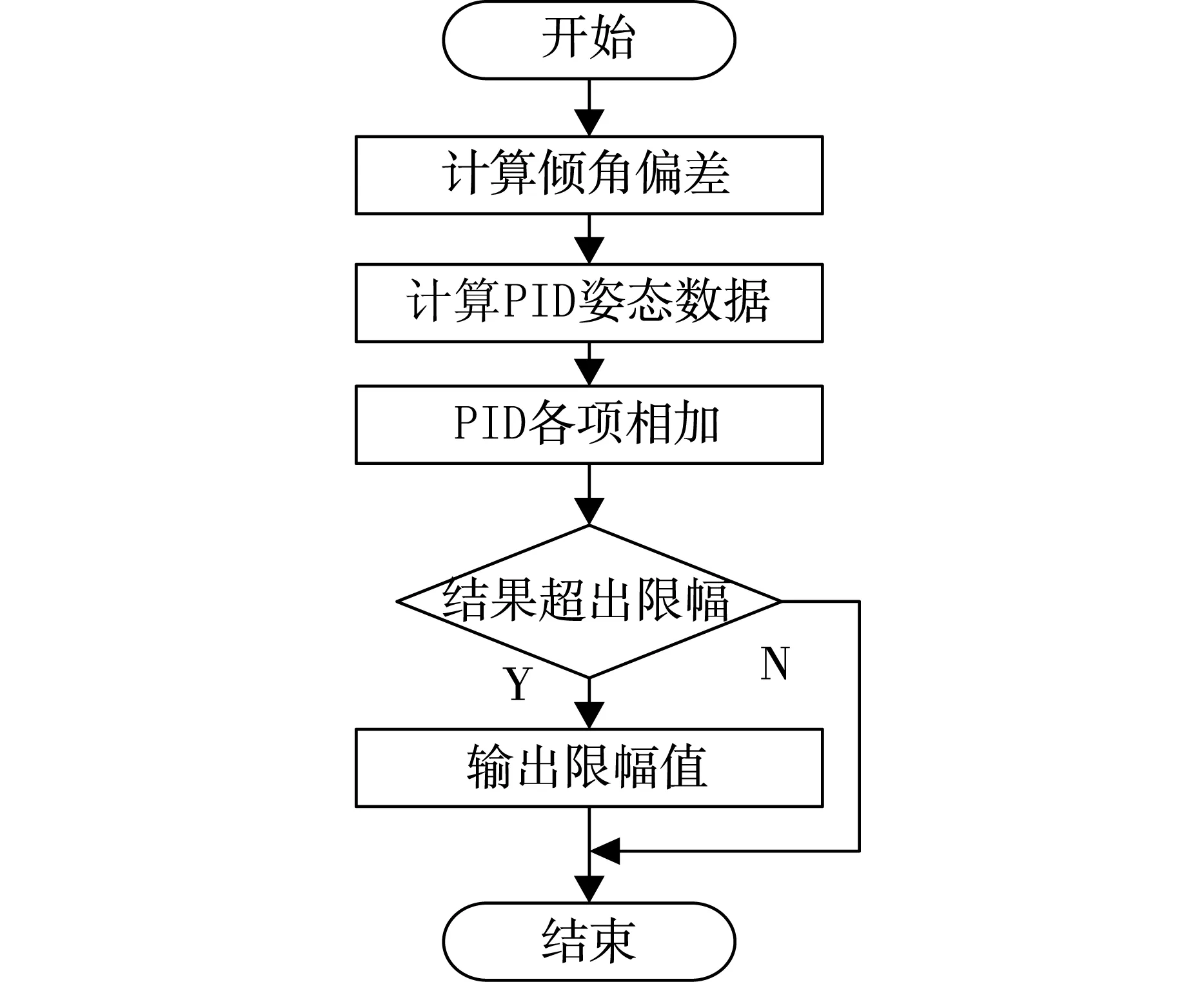
圖5 機器人自平衡控制流程
4 機器人系統(tǒng)測試
對機器人測試系統(tǒng)完成上電與自主尋物運動指令后,機器人執(zhí)行相應的前進后退、左旋右旋和左轉(zhuǎn)右轉(zhuǎn)等動作。當機器人自主運動一段時間后,機器人系統(tǒng)平衡傾角動態(tài)變化信息記錄如圖6所示,其中縱坐標為機器人傾角,橫坐標為運動時間。
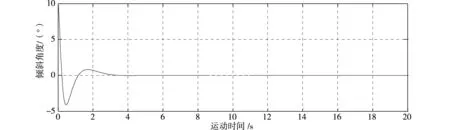
圖6 機器人系統(tǒng)平衡傾角動態(tài)變化信息
通過藍牙信息傳輸記錄了機器人系統(tǒng)執(zhí)行運動控制指令的自平衡測試偏離角測試數(shù)據(jù)如表1所示。
經(jīng)過表1計算可知,球形機器人自平衡平均時間約為4.02s,平均最大偏離角度約為3.96°。為了進一步驗證機器人系統(tǒng)抗干擾能力,進行了外力擾動測試。機器人自主恢復平衡的傾角變化信息如圖7所示,其中縱坐標為機器人傾角,橫坐標為運動時間。
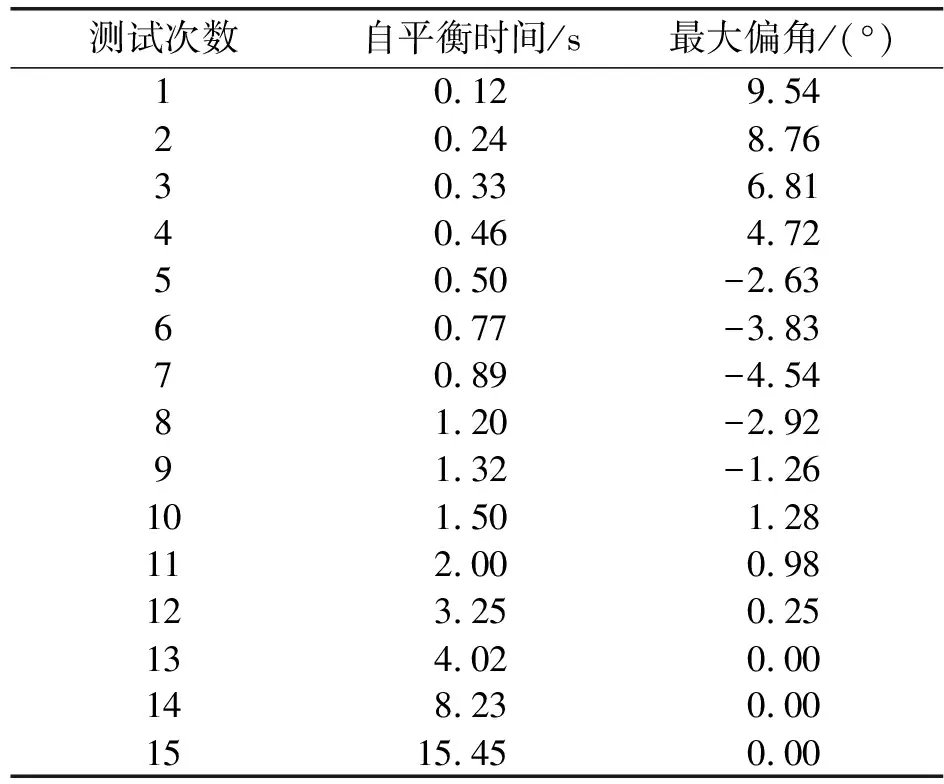
表1 機器人運動自平衡最大偏離角
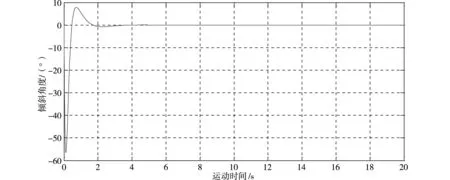
圖7 施加擾動又恢復平衡角度信息
系統(tǒng)施加多次擾動后,機器人自主恢復平衡時間以及最大偏離角的實驗測試記錄情況如表2所示。
由表2計算可知,系統(tǒng)受干擾的自平衡平均時間約為2.13s,平均最大偏角約為2.88°,系統(tǒng)受擾后的自平衡時間控制在3s以內(nèi),滿足球型機器人設計要求。
結(jié)語
視覺式物體自主識別球形移動機器人系統(tǒng)通過陀螺儀傾角數(shù)據(jù)采集、BPI-D1高清圖像采集、無線傳輸wifi與藍牙,完成了系統(tǒng)運動精確控制與自主物體識別等功能。該系統(tǒng)通過PID姿態(tài)保持和卡爾曼濾波算法處理,保證了機器人系統(tǒng)在受擾情況下自主平衡功能實現(xiàn)。經(jīng)過系統(tǒng)測試,系統(tǒng)運動中的最大傾角和自主平衡恢復時間均滿足球形機器人的設計要求,同時具備較強的魯棒性和抗干擾能力,具備較強的推廣與應用價值。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
制造技術與機床(2017年3期)2017-06-23 08:11:21
Coco薇(2017年5期)2017-06-05 08:53:16
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31