基于3種不同顏色空間的作物行提取方法比較研究
2023-06-17 16:22:41張秀麗周湘銘趙任重陳永周培林
江蘇農業科學 2023年10期
關鍵詞:機器視覺
張秀麗 周湘銘 趙任重 陳永 周培林


摘要:作物行檢測是精準農業和自動導航的關鍵。為研究不同顏色空間作物行提取方法克服光照條件變化影響的性能,綜合比較不同方法的優劣情況,選取歸一化RGB顏色空間提取ExG分量方法(ExG分量法)、HSV顏色空間提取H分量方法(H分量法)、CIE-Lab顏色空間提取a分量方法(a分量法)3種方法,分別在陰天和晴天2種光照條件下進行了詳細分析和比較。結果表明,ExG分量法和a分量法在陰天和晴天環境都具有可行性且基本能夠滿足實際需求;H分量法僅在陰天環境下具有可行性且基本能夠滿足實際需求,在晴天環境下無法完全準確分離作物和土壤。分析得出,陰天環境下綜合比較優劣結果為a分量法>H分量法>ExG分量法,晴天環境下綜合比較優劣結果為a分量法>ExG分量法。
關鍵詞:RGB;HSV;CIE-Lab;OTSU算法;作物行識別;機器視覺
中圖分類號:TP391.41文獻標志碼:A
文章編號:1002-1302(2023)10-0211-08
農業機械自動導航是精準農業應用的熱門核心技術之一[1-2],是實現精準農業的基礎。定位測姿信息采集是農業機械自動導航首要解決的問題,其輸出的信息具有準確性和可靠性,是農業機械實現自動導航的前提條件。在信息采集過程中,雖然非結構化環境容易對視覺導航傳感器產生各類負面影響,但是相對于全球導航衛星系統(GNSS)導航技術,機器視覺導航技術具有成本低、時效性好、可處理信息豐富和擴展性強等特點[3-4]。
作物行識別和定位是農機田間自動沿作物行導航的核心技術之一,作物行提取是農機視覺導航的重要環節。田間圖像灰度化是圖像處理領域研究中的熱門問題。灰度化的作用是將作物和背景初步分離,強調作物在圖像上的區域,弱化圖像的其他部分。灰度化效果決定了后續圖像處理的質量。國內外學者在田間圖像灰度化方面做了大量研究,Bakker等對RGB顏色空間歸一化后提取甜菜田間圖像的超綠分量[5]。José等在玉米苗圖像內提取RGB顏色空間的超綠特征[6]。楊洋等對RGB顏色空間進行歸一化后,采用過綠算法和最大類間方差法分割玉米與背景[7]。何潔等使用RGB顏色空間的G-R分量分割綠色農作物和土壤背景[8]。楊玲香等通過歸一化2g-r-b算法對農作物進行灰度化[9]。刁智華等選用RGB顏色空間,提取超綠顏色特征,將正常的葉片及其陰影部分和感染病害的葉片分離[10]。李祥光等選用HSV顏色空間,通過限定H、S、V分量的取值范圍對玉米行進行提取[11]。高國琴等選用HIS顏色空間,通過提取與光照無關的色調H分量對作物進行信息提取[12]。Meng等探究了綠植圖像HIS顏色空間中H分量的分布,建立了顏色空間H值數據庫,并基于H分量的閾值對綠植圖像進行二值化[13]。陳子文等提取了CIE-Lab顏色空間中的a分量對綠色像素進行區分,使用a分量對蔬菜作物行進行提取[14]。Bai等在作物提取過程中引入了粒子群優化和Lab空間中的形態學模型[15]。王愛臣等提取Lab顏色空間中a、b雙顏色分量,使用最大熵法選取最優閾值進行圖像分割[16]。
作物行特征與背景土壤在顏色上有明顯的差異,直接以顏色作為提取依據是主要的作物行提取方式,但是農機作業田間的光照環境復雜,陰影分布、光照度等光照不穩定引發的因素會讓顏色分離變得復雜。因此,目前作物行提取的相關研究都重視如何減少光照因素對處理過程的影響。目前,可以克服不同光照條件影響的作物行提取方法主要有以下2點區別:(1)選擇的顏色空間不相同;(2)在同一顏色空間中,對灰度分量的選擇或處理方式不相同。大多數研究在同一顏色空間對不同的灰度分量的選擇或處理方式進行探究后,僅作出定性可行性結論,目前對具有克服光照條件變化影響能力的多種顏色空間灰度化方法進行定性和定量分析的研究尚未見報道。本研究在分析和總結3種不同顏色空間的作物行提取方法原理的基礎上,將每種方法分別進行顏色空間轉換、灰度化和二值化分析,得出分別對應3種方法的適用條件,旨在為各類不同側重方向的作物行中心線提取研究提供參考依據。
1材料與方法
1.1數據采集
圖像采集設備采用CMOS機器視覺攝像頭,相機距離壟溝面高度1.3m,傾斜角度30°。數據采集時間為2021年1月27日,地點位于海南省五指山市番陽鎮洪吐村(109.412198°E,18.883121°N),田間土壤類型為沙壤土,作物品種為古引4號雪茄煙。分別采集陰天和晴天環境的田間作物行視頻,視頻幀率為30幀/s。陰天環境的視頻采集時間為作物移栽后第18天,晴天環境的視頻采集時間為作物移栽后第19天。分別在陰天和晴天環境下測量3次光照度并求其平均值,所用儀器為希瑪AS803光照度計;陰天環境的光照度平均值為2329lx,晴天環境的光照度平均值為20230lx。分別從2種光照條件視頻中提取各40張圖像樣本,共80張圖像樣本,圖像分辨率為960像素×544像素,為表述方便,下文中稱2種光照條件圖像樣本。圖像處理采用IntelCorei7-8700處理器(主頻3.20GHz),8GB內存,編程語言采用Python3.10.5開發,代碼編譯器為VisualStudioCode,程序運行操作系統為Windows10。
1.2作物行提取方法
本研究以相同的步驟,分別運用3種不同方法提取作物行特征,步驟順序為顏色空間轉換、灰度化、二值化,最終可以得到二值圖像。二值圖像分為目標和背景2個獨立的部分,在二值圖像的基礎上可以進一步完成作物行中心線提取工作。顏色空間轉換的作用是為灰度化做數據準備,且在該過程中可以對光照信息進行處理。灰度化的作用是提取作物行的基本輪廓并為二值化創造有利條件,本研究二值化的主要作用是評價3種灰度化方法所得的二值圖像的質量。二值化算法按照處理過程中的閾值是否變化,分為全局閾值二值化和局部閾值二值化;相對于局部閾值二值化,全局閾值二值化具備實現簡單、性能穩定、無需考慮圖像空間信息等諸多優勢,其中OTSU算法(最大類間方差算法)和最大熵閾值算法被廣泛用于尋找圖像的最佳全局閾值[17]。OTSU算法主要通過計算最大類間方差,自動確定最佳全局分割閾值,計算過程不需要對數據進行訓練學習,廣泛應用于各類作物特征的圖像處理研究[18-19]。本研究選取OTSU算法作為圖像二值化算法。
1.3灰度化研究方法原理
顏色空間是由描述顏色的若干分量所構成的多維空間。現有用于作物識別研究使用的顏色空間有歸一化RGB[7]、HSV[11]、HSI[12]、CIE-Lab[14],圖像顏色空間的選擇決定了灰度化的方法和結果。
1.3.1歸一化RGB顏色空間提取ExG分量方法現有絕大多數視覺導航所使用的相機都將所采集的圖像以RGB顏色空間的形式存儲于圖像文件中,直接采用RGB顏色空間進行數據處理是一種方便快捷的方式。RGB顏色空間是R、G、B這3種基本色進行不同程度的疊加,產生不同的顏色。RGB顏色空間的3個分量沒有直接對亮度信息表征,因此RGB顏色空間對光照變化很敏感,很容易受到光照變化的影響,這對圖像處理將產生極大的影響。針對以上問題,對RGB顏色空間進行圖像歸一化處理,能夠有效減少光照度差異對作物識別的影響[20],歸一化RGB顏色空間的3個分量計算方式如式(1)所示。
b=B/(B+G+R)
g=G/(B+G+R)
r=R/(B+G+R)。(1)
式中:b、g、r分別為顏色分量B、G、R的歸一化值,由b、g、r構成新的歸一化RGB顏色空間。RGB顏色空間提取綠色特征的灰度化方法主要使用植被指數提取法,該方法主要通過對b、g、r進行組合運算實現,主要的植被指數有超綠指數ExG[21]、優化超綠指數improvedExG[20]、超綠超紅差分指數ExGR[22]、植被指數組合COM[23]等,其中ExG運用最為廣泛。本研究采用ExG進行研究,ExG分量計算方法如式(2)所示。
ExG=2g-r-b。(2)
1.3.2HSV顏色空間提取H分量HSV與HSI是2種非常相似的顏色空間。H、S分別表示色調、飽和度分量;H分量定義顏色本身,是顏色的一個重要屬性;S分量表示色相與中性灰色的差別程度。兩者不同之處是亮度分量(V或I分量)的定義和計算不同,2種顏色空間都將亮度信息獨立儲存,并且廣泛運用于各類農業機器視覺技術。色調H分量是由物體表面的反射率決定的,其值唯一,且H分量的灰度圖像中,作物區域凸顯性很好。H分量法的具體做法是,直接提取HSV顏色空間或者HIS顏色空間的H分量灰度圖像,作為作物行特征的灰度圖像。鑒于2種顏色空間有相似性,為了簡化研究,本研究只對HSV顏色空間的H分量進行探究。
1.3.3CIE-Lab顏色空間提取a分量CIE-Lab顏色空間的L分量代表亮度;a、b分量代表色度,反映了顏色的色調和飽和度;其中a分量對綠色信息敏感。該顏色空間是獨立于設備的色彩空間,不受外源光照的影響,是設備之間顏色信息的交流橋梁;色彩信息和灰度信息易于清晰獲得,且該顏色空間被設置為歐氏距離,歐氏距離越小,體現為人體視覺顏色差異越小。a分量法的具體做法是直接提取a分量灰度圖像,作為作物行特征的灰度圖像[14]。
2結果與分析
2.1顏色空間轉換時效性比較
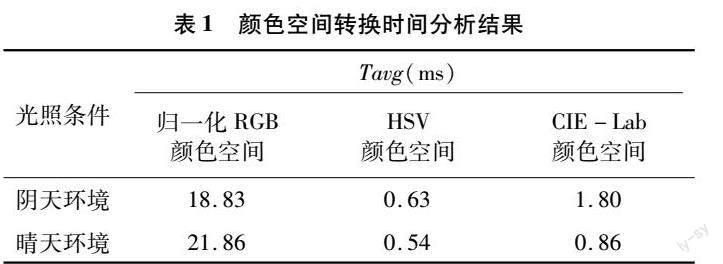
為了敘述方便,在本節及后續章節中將歸一化RGB顏色空間提取ExG分量方法稱作ExG分量法;HSV顏色空間提取H分量方法稱作H分量法;CIE-Lab顏色空間提取a分量方法稱作a分量法。歸一化RGB、HSV、CIE-Lab顏色空間均需要以RGB數據為基礎,進行顏色空間轉換得到,因此三者轉換過程對作物行提取算法的時效性有一定的影響。分別將2種光照條件圖像樣本的顏色空間轉換至歸一化RGB、HSV、CIE-Lab顏色空間,對單張圖像進行3次轉換試驗,并統計每張圖像每次轉換過程占用CPU的時間,即每種方法對每種光照條件的圖像樣本進行120次轉換試驗。顏色空間轉換方式主要通過矩陣運算方法轉換,3種顏色空間轉換時間分析結果如表1所示,其中Tavg為顏色空間轉換時間平均值,單位為ms。
可見歸一化RGB顏色空間的Tavg遠大于其他2種方法,HSV和CIE-Lab顏色空間的Tavg最大相差不足1.3ms,且均小于2ms,HSV顏色空間的時效性略優于CIE-Lab。參照陳子文等的時效性試驗結果[14,24-25],HSV和CIE-Lab顏色空間轉換過程相對于作物行識別整體過程的時效性影響有限,轉換時間可以忽略不記。相對于楊洋等的研究,作物行識別整體過程耗時97.56ms[7],歸一化RGB顏色空間轉換過程時效性不足。3種顏色空間時效性優劣關系為HSV>CIE-Lab>歸一化RGB。由于ExG方法還需要在歸一化RGB顏色空間的基礎上對ExG分量進行計算,計算工作量在原來基礎上會進一步加大;而H方法和a方法是直接提取單分量便完成灰度化,計算工作量相對于ExG分量法較小。由3種顏色空間時效性的優劣關系,可得到對應3種方法的優劣關系:H分量法>a分量法>ExG分量法。
2.2顏色空間克服光照條件變化影響能力比較
從田間環境可以發現,田間環境主要顏色特征有作物和土壤。在2種光照條件圖像樣本中,每幅圖像提取20個作物和土壤測試點,進行RGB、歸一化RGB、HSV、CIE-Lab顏色空間顏色分量值統計分析。HSV、CIE-Lab顏色空間各分量的取值范圍均量化為[0,255],為與其他文獻作比較,歸一化RGB顏色空間各分量的取值保持原有范圍。
每個顏色模型的各分量變化程度使用單個分量相對變化率表征,計算方法如式(3)所示:
δ=(x2-x1)/x1。(3)
式中:δ為單個分量相對變化率;x1為晴天環境下的單個分量值;x2為陰天環境下的單個分量值。
2種圖像樣本顏色模型的各分量總體變化程度使用單個分量平均相對變化率表征,計算方法如式(4)所示:
Δ=(δleaf+δsoil)/2。(4)
式中:δleaf、δsoil分別為葉片、土壤的單個分量相對變化率,由式(3)計算得出;Δ為單個分量平均相對變化率。2種光照條件下各顏色空間顏色分量值的統計分析結果如圖1-A~H所示,顏色分量平均相對變化率統計結果如圖1-I所示。
RGB顏色空間的b、g、r值平均相對變化率的平均值avg1=0.3308,歸一化RGB顏色空間的B、G、R值平均相對變化率的平均值avg2=0.0631,H值的平均相對變化率ΔH=0.2353,a值的平均相對變化率Δa=0.0394,四者關系為:Δa (1)RGB顏色空間:該顏色空間下的圖像為原始圖像,沒有對光照因素進行處理。在晴天和陰天環境下,RGB顏色空間的B、G、R值變化顯著,以avg1為參照值,當其他顏色空間的對照值小于avg1時,判定為具有克服光照條件變化的影響能力。 (2)歸一化RGB顏色空間:圖像經過RGB顏色空間顏色分量歸一化處理后avg2<avg1,光照條件發生變化時,歸一化RGB顏色空間的b、g、r3值變化程度降低。通過對顏色分量歸一化處理,確保不同光照條件下顏色分量變化規律相同,該結論與楊洋等的研究結論[7]一致。 (3)HSV顏色空間:在光照條件發生變化時,ΔH>avg1,H分量法能夠減少光照變化影響,但是ΔH>Δa,減少光照變化影響的能力不如ExG分量法和a分量法。 (4)CIE-Lab顏色空間:在光照條件發生變化時,Δa<avg2<ΔH<avg1,a分量法能夠減少光照變化影響,且與ExG分量法和H分量法比較,三者之間a分量法效果最佳。 3種方法的對應評價指標均小于avg1,3種顏色空間對應的灰度化方法均可以減少光照變化影響,但是3種顏色空間克服光照條件變化影響能力有一定的差異,由優到劣的順序是:a分量法>ExG分量法>H分量法。 2.3直方圖分析和二值化比較 分別從2種光照條件圖像樣本中隨機選取1幅原始圖像進行灰度化和二值化探究(圖2)。分別使用3種方法對陰天環境和晴天環境的原始圖像進行灰度化后,再分別對得到的灰度圖像進行二值化,過程中對3種方法的灰度圖像提取對應的灰度直方圖(簡稱為直方圖),直方圖灰度分布呈現雙峰現象越明顯越有利于二值化。為方便比較,此處將CIE-Lab顏色空間各分量的取值范圍亦均量化為[0,255]。上述過程所得圖像如圖3、圖4所示。 由圖3-A、圖4-A的ExG分量法灰度圖像和圖3-B、圖4-B的H分量法灰度圖像可知,作物特征在灰度圖像中呈現高亮區域,因此ExG和H分量法的二值化方法如式(5)所示: 由圖3-C、圖4-C的a分量法灰度圖像可知,作物特征在灰度圖像中呈現暗淡區域,因此a分量法的二值化方法見式(6): 式中:I1、I2為對應灰度圖像任意一點P(x,y)的灰度值,最佳閾值threshold1、threshold2是二值化最佳閾值,該閾值可以使得灰度圖像中所有像素的類間方差最大。當B1=0或B2=0時,P(x,y)為背景點(黑色);當B1=255或B2=255,P(x,y)為目標點(白色)。在圖像中,背景點為土壤,目標點定為作物行特征或噪點,二值化最佳閾值按照以上原理可以將直方圖劃分為2個部分灰度值范圍,2個部分灰度值范圍的像素點對應二值圖像中白色區域或黑色區域內的像素點。2種環境3種方法的二值化結果如圖3-G~I、圖4-G~I所示。定性分析,2種光照條件的二值圖像中,除了圖4-H的晴天環境H分量法二值圖像無法分離作物和土壤,其他二值圖像都可以得到作物行輪廓清晰的二值圖像,可以基本能夠滿足實際需求。 直方圖存在雙峰現象越明顯,其對應灰度化方法的地物區分性能越強[26]。以下對陰天環境和晴天環境3種方法的直方圖進行分析。 陰天環境下,如圖3-E、F所示,H分量法和a分量法在直方圖呈現雙峰現象。ExG分量法的直方圖雙峰現象雖然不明顯,但是仍然可見(圖3-D)。結合圖3-G,二值化仍然可以將作物行和土壤有效分離。因此,陰天環境下3種方法對應生成的直方圖都為雙峰直方圖;ExG分量法直方圖呈現的雙峰現象并不是特別明顯,在極端情況下有可能難以區分土壤和作物;其余2種方法的直方圖呈現雙峰現象明顯。因此,陰天環境下,地物區分性能由強到弱關系順序為H分量法=a分量法>ExG分量法。 在晴天環境下,ExG分量法的直方圖雙峰現象雖然不明顯,但是仍然可見(圖4-D)。結合圖4-G,二值化仍然可以將作物行和土壤有效分離。ExG分量法的直方圖呈現雙峰現象并不明顯,相對較難區分土壤和作物。H分量法直方圖總體上呈現 多峰現象和刺峰現象,二值化算法難以找到合適的閾值將土壤和作物分離,地物區分性能相對較差(圖4-E)。a分量法直方圖呈現雙峰現象,容易進行土壤和作物區分(圖4-F)。晴天環境下,地物區分性能由強到弱關系順序為a分量法>ExG分量法>H分量法。 綜上可知,a分量法在2種條件下都具有很好的地物區分性能;ExG分量法次之;H分量法的地物區分性能具有不穩定性,在陰天環境下容易將作物行和土壤有效分離,而晴天環境下則不能有效分離。 結合圖2-B、圖4-B、E、H對晴天環境H分量法的異常原因進行分析。圖4-H中,二值圖像高亮區域實際上是作物行與土壤陰影區域的并集,再結合圖4-E直方圖分析,可推斷晴天環境下H分量法失效的原因是,圖2-B中的作物行與土壤陰影區域對應的灰度值范圍,同屬以threshold1劃分成的2個部分灰度值范圍的同一部分,threshold1數值見圖4-E虛線標注,導致OTSU算法將作物行和土壤陰影區域都劃分成一塊區域。對比無大量陰影的陰天環境,可見H分量法對于有大量陰影的晴天環境適應性不強。因此,運用OTSU算法對灰度圖像進行二值化時,H分量法的場景適應能力比ExG、a分量法差。H分量法對陰天環境的作物行特征可以有效提取,但是對晴天環境的作物行特征不能有效提取;ExG、a分量法在2種環境下都可以有效提取圖像的作物行特征。 最理想的二值圖像應該沒有噪點,噪點越少越有利于提高作物行檢測的精度和降低后續過程的計算量。在二值圖像內,噪點一般以小面積的孤立連通區域存在,所以可將小面積的孤立連通區域識別為圖像內的噪點。 定性角度分析來看,結合圖3-G~I判斷,陰天環境下,a分量法生成的二值圖像噪點相對于其他2種較少,H分量法比ExG分量法的二值圖像噪點少。結合圖4-G~I判斷,晴天環境下,在異常的H分量法二值圖像不參與比較的條件下,a分量法生成的二值圖像噪點數量和總面積相對于ExG分量法少。 從定量角度驗證,定義小于50像素的孤立連通區域為噪點區域,選取2種光照條件圖像樣本,對所 得陰天和晴天環境下的3種方法二值圖像,分別統計面積小于50像素的噪點連通區域數量和總面積,并計算對應的平均值、最大值、最小值,圖像噪點分析結果如圖5所示。連通區域數量反映二值圖像內噪點的數量,噪點連通區域總面積各指標反映噪點在圖像內的總面積。2種光照條件下,ExG分量法二值圖像的噪點數量和總面積各指標遠大于H分量法和a分量法;在排除異常的晴天環境H分量法數據的情況下,H分量法和a分量法生成的圖像噪點數量各項數據相近,但是a分量法各項指標均小于或等于H分量法,a分量法稍占優勢。因此,a分量法可以最大程度地減少圖像噪點生成,其次是H分量法,但與前者相差不大,最后是ExG分量法。 3討論與結論 本研究首先介紹了3種不同顏色空間的具有克服光照條件變化影響能力的作物行提取方法的原理,然后分別以顏色空間轉換、灰度化、二值化的步 驟,實際運用3種方法對田間作物行特征進行提取,并對結果進行了詳細的分析和比較。 分析結果表明,ExG分量法和a分量法在陰天和晴天環境都具有可行性,且都基本能夠滿足實際需求。H分量法僅在陰天環境下具有可行性且基本能夠滿足實際需求,在晴天環境下無法準確分離作物和土壤。三者在性能上有一定的差異:H分量法和a分量法在時效性方面均優于ExG分量法,H分量法的時效性指標僅勝于a分量法不足1.3ms。a分量法和ExG分量法克服光照條件變化影響的能力均遠優于H分量法,a分量法克服光照條件變化影響的能力勝于ExG分量法。a分量法在2種光照條件下都具有很好的地物區分性能;ExG分量法次之;而H分量法的地物區分性能不穩定且場景適應能力相對不足,在陰天環境下可將作物行和土壤有效分離,而晴天環境下則不能,原因在于晴天環境陰影過多。a分量法的抗噪能力略勝于H分量法,ExG分量法相對前二者較弱。根據以上結論,歸納總結出3種方法的適用條件如下。 (1)識別環境為光照均勻的陰天環境。當算法側重于時效性要求,時效性要求在小于10ms級別時,可選擇H分量法;時效性要求在10~100ms級別時,可選擇a分量法和H分量法;時效性要求在100ms以上級別時,3種方法均可選擇。當算法側重于克服光照條件變化影響的能力要求時,可以優先選擇a分量法,其次是ExG分量法,最后是H分量法。當算法側重于圖像質量要求時:可以優先選擇a分量法,其次是H分量法,最后是ExG分量法。由于在實際作物行檢測過程中,算法需要適應各種實際田間條件和要求,因此作物行提取算法需要在綜合考慮多種影響算法性能的基礎上來編寫。陰天環境下,綜合比較結果為a分量法>H分量法>ExG分量法。 (2)識別環境為光照不均勻的晴天環境。H分量法無法分離作物和土壤,a分量法和ExG分量法則可以正常分離。時效性要求、光照條件變化影響能力要求和圖像質量要求的選擇次序為對應陰天環境下去除H分量法時的選擇次序。晴天環境下,綜合比較結果為a分量法>ExG分量法。 參考文獻: [1]BoursianisAD,PapadopoulouMS,DiamantoulakisP,etal.InternetofThings(IoT)andAgriculturalUnmannedAerialVehicles(UAVs)insmartfarming:acomprehensivereview[J].InternetofThings,2022,18:100187. [2]胡靜濤,高雷,白曉平,等.農業機械自動導航技術研究進展[J].農業工程學報,2015,31(10):1-10. [3]余曉蘭,萬云,陳靖照.基于雙目視覺的機器人定位與導航算法[J].江蘇農業科學,2022,50(6):154-161. [4]張漫,季宇寒,李世超,等.農業機械導航技術研究進展[J].農業機械學報,2020,51(4):1-18. [5]BakkerT,WoutersH,vanAsseltK,etal.Avisionbasedrowdetectionsystemforsugarbeet[J].ComputersandElectronicsinAgriculture,2008,60(1):87-95. [6]Bengochea-GuevaraJM,Conesa-MuozJ,AndújarD,etal.MergefuzzyvisualservoingandGPS-basedplanningtoobtainapropernavigationbehaviorforasmallcrop-inspectionrobot[J].Sensors(Basel,Switzerland),2016,16(3):276. [7]楊洋,張博立,查家翼,等.玉米行間導航線實時提取[J].農業工程學報,2020,36(12):162-171. [8]何潔,孟慶寬,張漫,等.基于邊緣檢測與掃描濾波的農機導航基準線提取方法[J].農業機械學報,2014,45(增刊1):265-270. [9]楊玲香,王田田,何旭.基于隨機抽樣一致性算法(RANSAC)的農作物行提取[J].江蘇農業科學,2017,45(2):195-197. [10]刁智華,刁春迎,魏玉泉,等.機器人系統中小麥病害識別與施藥算法研究[J].江蘇農業科學,2017,45(17):192-195. [11]李祥光,趙偉,趙雷雷.缺株玉米行中心線提取算法研究[J].農業工程學報,2021,37(18):203-210. [12]高國琴,李明.基于K-means算法的溫室移動機器人導航路徑識別[J].農業工程學報,2014,30(7):25-33. [13]MengQK,QiuRC,HeJ,etal.Developmentofagriculturalimplementsystembasedonmachinevisionandfuzzycontrol[J].ComputersandElectronicsinAgriculture,2015,112:128-138. [14]陳子文,李偉,張文強,等.基于自動Hough變換累加閾值的蔬菜作物行提取方法研究[J].農業工程學報,2019,35(22):314-322. [15]BaiXD,CaoZG,WangY,etal.CropsegmentationfromimagesbymorphologymodelingintheCIEL*a*b*colorspace[J].ComputersandElectronicsinAgriculture,2013,99:21-34. [16]王愛臣,張敏,劉青山,等.基于區域生長均值漂移聚類的苗期作物行提取方法[J].農業工程學報,2021,37(19):202-210. [17]FanYX,ChenYY,ChenX,etal.Estimatingtheaquatic-plantareaonapondsurfaceusingahue-saturation-componentcombinationandanimprovedOtsumethod[J].ComputersandElectronicsinAgriculture,2021,188:106372. [18]XuBR,ChaiL,ZhangCL.ResearchandapplicationoncorncropidentificationandpositioningmethodbasedonMachinevision[J].InformationProcessinginAgriculture,2023,10(1):106-113. [19]JiangGQ,WangZH,LiuHM.Automaticdetectionofcroprowsbasedonmulti-ROIs[J].ExpertSystemsWithApplications,2015,42(5):2429-2441. [20]ZhouY,YangY,ZhangBL,etal.Autonomousdetectionofcroprowsbasedonadaptivemulti-ROIinmaizefields[J].InternationalJournalofAgriculturalandBiologicalEngineering, 2021,14(3):217-225. [21]胡煉,羅錫文,曾山,等.基于機器視覺的株間機械除草裝置的作物識別與定位方法[J].農業工程學報,2013,29(10):12-18. [22]MeyerGE,NetoJC.Verificationofcolorvegetationindicesforautomatedcropimagingapplications[J].ComputersandElectronicsinAgriculture,2008,63(2):282-293. [23]GuerreroJM,GuijarroM,MontalvoM,etal.Automaticexpertsystembasedonimagesforaccuracycroprowdetectioninmaizefields[J].ExpertSystemsWithApplications,2013,40(2):656-664. [24]刁智華,吳貝貝,毋媛媛,等.基于最大正方形的玉米作物行骨架提取算法[J].農業工程學報,2015,31(23):168-172. [25]孟慶寬,張漫,楊耿煌,等.自然光照下基于粒子群算法的農業機械導航路徑識別[J].農業機械學報,2016,47(6):11-20. [26]高永剛,林悅歡,溫小樂,等.基于無人機影像的可見光波段植被信息識別[J].農業工程學報,2020,36(3):178-189.
猜你喜歡
軟件導刊(2016年11期)2016-12-22 21:52:17
電腦知識與技術(2016年28期)2016-12-21 12:13:14
科技視界(2016年26期)2016-12-17 17:31:58
科技視界(2016年25期)2016-11-25 19:53:52
科技視界(2016年25期)2016-11-25 09:27:34
科教導刊(2016年25期)2016-11-15 17:53:37
軟件工程(2016年8期)2016-10-25 15:55:22
科技視界(2016年20期)2016-09-29 11:11:40
科技視界(2016年6期)2016-07-12 09:12:40
科技視界(2016年15期)2016-06-30 19:03:30