垃圾桶提升機(jī)結(jié)構(gòu)改進(jìn)與控制系統(tǒng)設(shè)計
2023-10-07 03:55:00李長征朱寶華屠佳佳史偉民
機(jī)床與液壓 2023年17期
關(guān)鍵詞:設(shè)備
李長征,朱寶華,屠佳佳,2,史偉民
(1.浙江理工大學(xué)教育部現(xiàn)代紡織裝備技術(shù)工程研究中心,浙江杭州 310018;2.浙江機(jī)電職業(yè)技術(shù)學(xué)院自動化學(xué)院,浙江杭州 310053)
0 前言
垃圾分類是近幾年來人們重點(diǎn)關(guān)注的。隨著人口的增長與生活水平的不斷提高,餐飲業(yè)的迅速發(fā)展,特別是外賣行業(yè)的快速興起,使得廚余垃圾產(chǎn)生量逐年上升。廚余垃圾必須進(jìn)行及時處理,否則會腐敗變質(zhì),對自然界造成一定污染[1],其中垃圾桶提升機(jī)在垃圾處理設(shè)備中扮演著重要的角色。
垃圾桶提升機(jī)主要應(yīng)用在環(huán)衛(wèi)車以及廚余垃圾處理設(shè)備上,主要以提升專用尺寸垃圾桶為主。我國首次對提升機(jī)結(jié)構(gòu)進(jìn)行設(shè)計的是福建龍馬環(huán)衛(wèi)裝備股份有限公司的羅龍明[2],他所設(shè)計的提升機(jī)構(gòu)主要是與垃圾車做配套,設(shè)計出一套平面四連桿機(jī)構(gòu)來實(shí)現(xiàn)垃圾桶的提升與翻轉(zhuǎn),然后陸續(xù)有人對該提升機(jī)構(gòu)做出改進(jìn)。后來,該提升機(jī)構(gòu)被曹昌勇等[3]應(yīng)用在餐余垃圾分揀系統(tǒng)上,并設(shè)計出一套PLC閉環(huán)控制與液壓控制相結(jié)合的垃圾桶提升系統(tǒng)。
目前國內(nèi)垃圾處理設(shè)備上的提升機(jī)多數(shù)沒有設(shè)置稱重結(jié)構(gòu),只有少數(shù)設(shè)置稱重平臺,但因?yàn)闈M桶質(zhì)量較大,稱重平臺又設(shè)有斜坡,單人操作較難,而且提升機(jī)構(gòu)結(jié)構(gòu)穩(wěn)定性、可靠性不高,因此,作者針對提升機(jī)結(jié)構(gòu)優(yōu)化與控制系統(tǒng)進(jìn)行研究,設(shè)計出易操作,工作穩(wěn)定、可靠,與廚余垃圾處理設(shè)備配套的提升機(jī)。
1 廚余垃圾處理設(shè)備與垃圾桶介紹
廚余垃圾處理設(shè)備集提升、分揀、撕碎、擠壓、攪拌、發(fā)酵、烘干為一體,廚余垃圾處理設(shè)備透視圖如圖1所示。

圖1 廚余垃圾處理設(shè)備透視圖
圖1為小型分體式廚余垃圾處理設(shè)備,它可以有效解決廚余垃圾污染問題,生產(chǎn)化工原料、有機(jī)肥等[4],常放置在單位食堂、社區(qū)衛(wèi)生站等場所。具體工藝流程如圖2所示。

圖2 廚余垃圾處理工藝流程
圖2中,廚余垃圾處理的工藝流程是將生活有機(jī)垃圾、農(nóng)作物廢棄物和畜禽糞便等物料裝入120 L垃圾桶內(nèi),然后經(jīng)提升機(jī)機(jī)械提升,接著倒入分揀臺進(jìn)行人工分揀,再接著進(jìn)入撕碎機(jī)撕碎,撕碎過的物料自動落入擠壓絞龍中,經(jīng)過絞龍的循環(huán)擠壓脫水后,物料進(jìn)入發(fā)酵-烘干一體倉進(jìn)行厭氧發(fā)酵,發(fā)酵結(jié)束后,提高油溫進(jìn)行最后的烘干處理得到有機(jī)肥或有機(jī)土。
廚余垃圾處理設(shè)備可選裝油水分離裝置和廢氣處理裝置,擠壓脫水產(chǎn)生的液體進(jìn)行油水分離后,污水進(jìn)行達(dá)標(biāo)排放,油脂通過酸催化預(yù)酯化和堿催化酯交換反應(yīng)轉(zhuǎn)化為酯,然后減壓蒸餾生成生物柴油[5];發(fā)酵和烘干所產(chǎn)生的廢氣經(jīng)風(fēng)機(jī)抽取進(jìn)入廢氣處理裝置中進(jìn)行雙層活性炭吸附,當(dāng)氣體分子通過活性炭時,固態(tài)或液態(tài)顆粒可被活性炭的多孔截留,氣體分子可與活性炭的官能團(tuán)結(jié)合成穩(wěn)定的化學(xué)鍵,從而完成除臭,然后進(jìn)行廢氣的達(dá)標(biāo)排放[6]。
如圖3所示為120 L垃圾桶實(shí)物,為垃圾處理設(shè)備中所用垃圾桶[7]。
圖3所示垃圾桶的結(jié)構(gòu)特征有:
(1)桶體和桶蓋使用一次性鑄模而成,堅(jiān)固耐用。
(2)桶內(nèi)光潔,減少垃圾殘留,易于清潔。
(3)桶身、箱口及底部特別加固加厚處理,可經(jīng)受各種外力(如碰撞、提升及墜落等)。
2 提升機(jī)結(jié)構(gòu)設(shè)計建模與改進(jìn)
提升機(jī)[8]廣泛應(yīng)用于環(huán)衛(wèi)工作,大多為后期加裝,沒有統(tǒng)一標(biāo)準(zhǔn)。圖4所示為優(yōu)化前廚余垃圾處理設(shè)備上所配備的提升機(jī)。

圖4 改進(jìn)前提升機(jī)三維結(jié)構(gòu)
改進(jìn)前提升機(jī)采用液壓泵提供動力,利用鏈條與浮動框架結(jié)構(gòu)。浮動框架采用多塊鋼板焊接而成,長時間工作會出現(xiàn)變形情況。這種提升機(jī)稱重平臺安裝在地面,方便測量,但當(dāng)大量滿載廚余垃圾的垃圾桶到來時,上料會產(chǎn)生一定難度。所以作者對提升機(jī)進(jìn)行改進(jìn),使其結(jié)構(gòu)緊湊,工作安全、可靠,與廚余垃圾處理設(shè)備緊密配合。優(yōu)化后的提升機(jī)三維結(jié)構(gòu)圖如圖5所示。

圖5 改進(jìn)后提升機(jī)三維結(jié)構(gòu)
主要對夾緊結(jié)構(gòu)、稱重結(jié)構(gòu)和固定框架做了改進(jìn),包括浮動外框架、浮動內(nèi)框架、安裝角鐵、橫梁、稱重槽鋼、稱重儀。
改進(jìn)后提升機(jī)采用廚余垃圾處理設(shè)備內(nèi)置液壓泵提供動力,動力穩(wěn)定,噪聲小,采用鏈條-連桿-浮動軸結(jié)構(gòu),更加方便垃圾桶的提升和翻轉(zhuǎn);整個提升機(jī)大多數(shù)采用方管、槽鋼焊接而成,工作穩(wěn)定、可靠;稱重儀布置在鏈條固定側(cè),在勻速提升時測量垃圾質(zhì)量,結(jié)構(gòu)更加緊湊,符合人機(jī)工程學(xué);橫梁位置可根據(jù)不同尺寸垃圾處理設(shè)備進(jìn)行更改,便于安裝。
3 提升液壓缸選型計算
3.1 提升液壓缸受力分析
提升液壓缸受力分析如圖6所示。
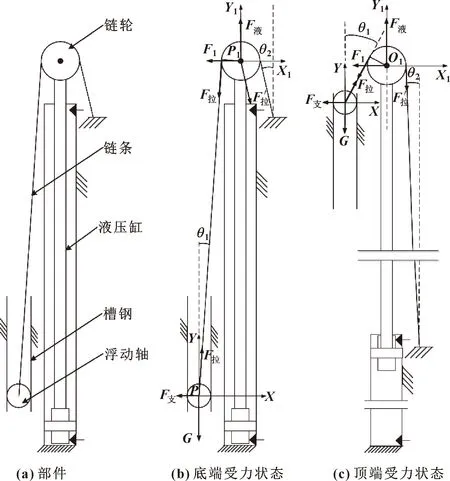
圖6 液壓缸受力分析
如圖6(a)所示為液壓缸受力相關(guān)部件,液壓缸固定,液壓缸為雙作用單桿液壓缸[9],活塞桿吊耳與鏈輪鉸接,鏈條一端固定,另一端與浮動軸鉸接,浮動軸在槽鋼內(nèi)上下移動。
圖6(c)所示為液壓缸初始位置受力狀態(tài)簡圖,實(shí)際工作時,液壓缸豎直放置,浮動軸主要受重力G(滾動摩擦力、水平方向槽鋼支撐力忽略不計),G等于浮動框架重力加空垃圾桶重力加廚余垃圾重力,在點(diǎn)O進(jìn)行受力分析,主要是豎直向下的重力G和沿著鏈條的拉力F拉和垂直于槽鋼內(nèi)壁的支撐力F支,受力分析[10]得:
(1)
式中:θ1=5°;由于G約為2 000 N,取安全系數(shù)為1.5,故G=3 000 N。

(2)
式中:θ2=15°。
聯(lián)立式(1)(2)得,F(xiàn)液=5 908 N,F(xiàn)1=516 N。
3.2 提升液壓缸選型
根據(jù)液壓缸受力分析可得,最大液壓力F液=5 908 N,工作行程L=600 mm,要求液壓缸的動作時間t=5 s,活塞桿最大行程時受徑向力,液壓缸選用HSG工程液壓油缸,工作壓力16 MPa,缸徑40~400 mm,根據(jù)表1初選缸徑。

表1 HSG工程液壓油缸參數(shù)
結(jié)合提升機(jī)結(jié)構(gòu)尺寸、高度、行程及液壓缸徑向壓力,初選缸徑D=50 mm,活塞桿直徑d=32 mm,型號為HSGL01-50/32×SE-1101的HSG工程液壓油缸。
3.3 確定液壓缸最大工作壓力
液壓缸的平均速度v=120 mm/s,選取負(fù)荷率β=80%。
(3)
式中:F0為理論拉力,液壓缸實(shí)際出力低于理論出力;p為液壓壓力;A為活塞桿腔面積;D為液壓缸缸體直徑;負(fù)荷率β值,在慣性力小的場合取β=80%,慣性力大的場合取β=60%,這里速度較低,負(fù)載力較小,所以慣性力較小,故取β=80%。
由(3)式得:
(4)
將數(shù)值代入式(4),得出p=15 MPa<16 MPa,即最大工作壓力為15 MPa,也為溢流閥設(shè)置壓力。
4 提升液壓缸仿真分析
整個機(jī)構(gòu)中受力的主要部件是液壓缸,它在提升機(jī)工作時的受力情況將直接影響其安全性與穩(wěn)定性。現(xiàn)采用ANSYS Workbench軟件對液壓缸進(jìn)行靜力學(xué)分析[11],主要分析它的應(yīng)力與變形情況。首先選擇材料屬性,液壓缸選定材料為45鋼,在Engineeing Data中選取材料Structural Steel,并更改相應(yīng)參數(shù);然后在SolidWorks軟件中對液壓缸進(jìn)行建模,另存為x_t格式,導(dǎo)入ANSYS Workbench中;接著進(jìn)行網(wǎng)格劃分,對模型施加邊界條件及載荷;最后求解。
4.1 模型建立
SolidWorks軟件是現(xiàn)在最為常用的三維繪圖軟件之一,考慮到它與ANSYS軟件可以實(shí)現(xiàn)無縫銜接[12],所以首先利用SolidWorks軟件建立液壓缸的三維簡化模型,如圖7所示。

圖7 三維模型
液壓缸三維模型主要參數(shù)如下:液壓缸缸體直徑50 mm,壁厚10 mm,活塞桿直徑32 mm,然后將模型導(dǎo)入ANSYS Workbench中。
4.2 定義材料屬性與網(wǎng)格劃分
HSG液壓缸材料大多為45鋼,其彈性模量為206 GPa,泊松比為0.3。對液壓缸進(jìn)行網(wǎng)格劃分,采用四面體單元,缸體和活塞桿單元長度5 mm,缸底和缸頂單元長度2 mm,對接觸受力面進(jìn)行了細(xì)密化處理,單元長度為1 mm。最終劃分的結(jié)果是該模型總節(jié)點(diǎn)數(shù)925 801個,實(shí)體單元數(shù)584 736個,其網(wǎng)格劃分效果如圖8所示,主要接觸受力面網(wǎng)格劃分細(xì)節(jié)如圖8(b)所示。

圖8 網(wǎng)格劃分效果
4.3 約束和載荷的施加
液壓缸簡化模型約束和載荷的施加情況如圖9所示。
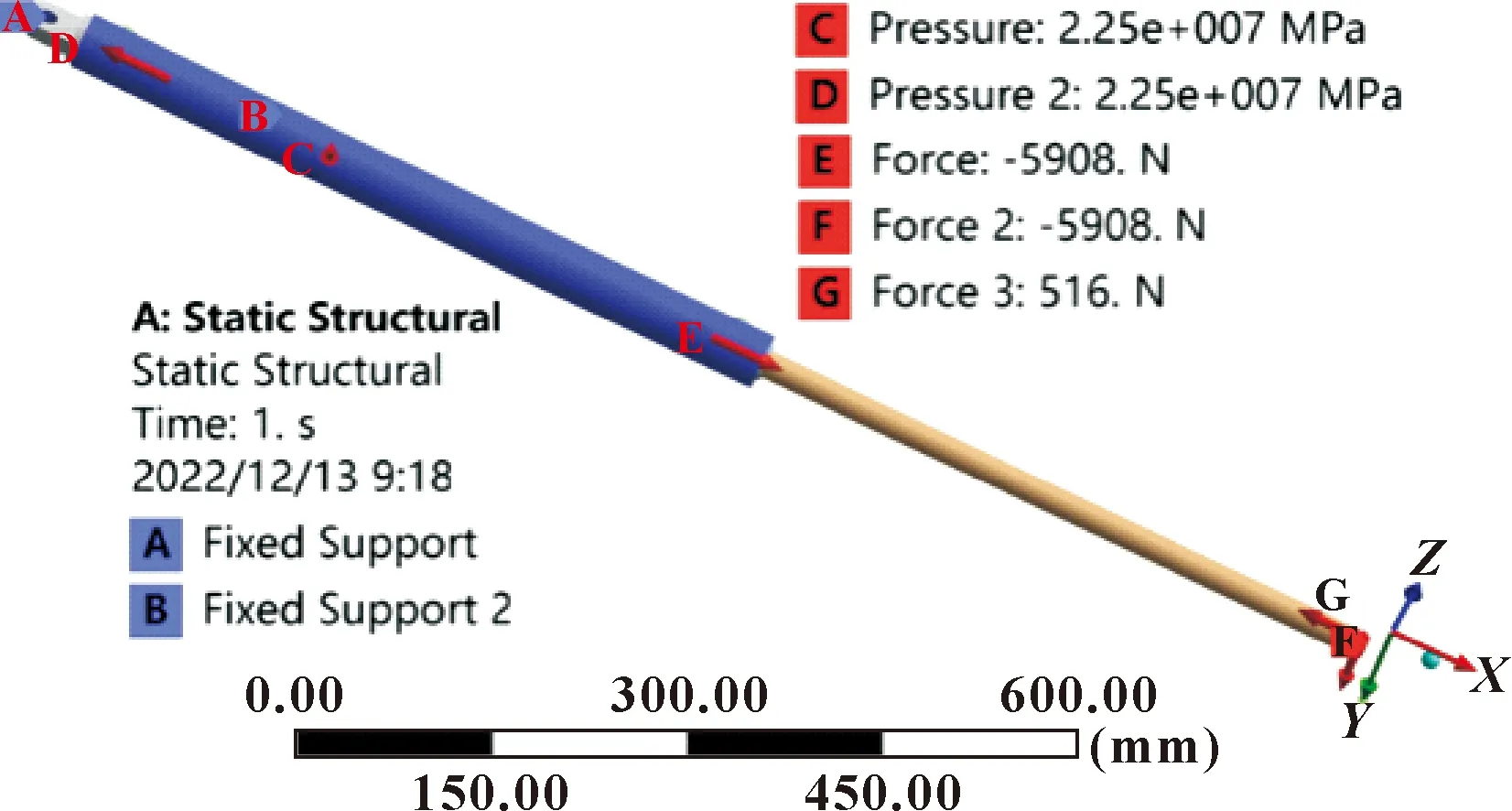
圖9 液壓缸的約束和載荷
對液壓缸進(jìn)行有限元分析時,為了使其數(shù)值解存在且唯一,左側(cè)吊耳的位移需要消除,根據(jù)實(shí)際工況,缸體頂部的位移也需要消除,所以在左側(cè)吊耳內(nèi)圓柱面和缸體外表面施加各個方向的位移約束;在活塞桿頂部平面和底部平面各施加5 908 N的力,方向垂直于各平面向內(nèi);在活塞桿頂部側(cè)圓柱面施加516 N的力,方向垂直于該圓柱面;由于液壓缸的實(shí)際工作壓力為15 MPa,根據(jù)國家規(guī)定的加載方式,對液壓缸進(jìn)行1.5倍載荷的施加,即對液壓缸施加22.5 MPa的工作壓力,分別對液壓缸缸體內(nèi)表面和缸體底部施加載荷。
4.4 液壓缸變形情況
經(jīng)過求解,得出液壓缸的變形云圖如圖10所示。

圖10 變形云圖
液壓缸受載時,液壓缸會出現(xiàn)微小變形。將其變形放大11倍,可以更直觀地看出液壓缸各部分的變形情況。從圖10中可以看出左端吊耳和缸體外表面的位移為0,說明約束條件與分析的結(jié)果一致;液壓缸主要變形發(fā)生在活塞桿上,最大變形發(fā)生在活塞桿頂部處,最大變形量是8.35×10-3m,變形值在安全范圍內(nèi),從而驗(yàn)證了液壓缸選型的正確性。
4.5 液壓缸等效應(yīng)力分布情況
液壓缸模型的等效應(yīng)力分布云圖如圖11所示。

圖11 等效應(yīng)力分布云圖
從圖11中局部放大圖可以看出:由于受徑向力的作用,活塞桿底端階梯倒角處受力最大,最大值為274.87 MPa,約等于275 MPa。由于45鋼的屈服強(qiáng)度為355 MPa,而且液壓缸選型計算以及仿真分析都已經(jīng)設(shè)置安全系數(shù),所以液壓缸的設(shè)計滿足應(yīng)力要求。
5 提升機(jī)電氣與液壓系統(tǒng)設(shè)計
5.1 提升機(jī)電氣系統(tǒng)設(shè)計
圖12為提升機(jī)電氣系統(tǒng)原理[13]。
圖12中,控制器采用三菱FX3U系列,具體I/O口數(shù)量需滿足廚余垃圾處理設(shè)備需求;稱重儀采用Z型,并配有稱重顯示屏,稱重顯示屏與控制器采用485通信方式,24 V供電;觸摸屏與控制器通信采用RS232C通信方式,24 V供電;另外還包括開關(guān)、變壓器、直流電源、熔斷器、繼電器、接觸器等電氣元件。
提升機(jī)外部控制按鈕和限位傳感器為輸入,有升降外停、外部上升、外部下降、上升限位和下降限位,其中升降外停為常閉按鈕,上升限位、下降限位為NPN常閉型傳感器,外部上升、外部下降為常開按鈕。繼電器KA1輔助常開觸點(diǎn)控制三位四通電磁閥左位通斷,繼電器KA2輔助常開觸點(diǎn)控制三位四通電磁閥右位通斷,KA1、KA2互鎖。接觸器KM1主要控制液壓泵的通斷,有低電壓釋放保護(hù)作用。提升機(jī)具體工作過程如下:
(1)在三菱編程軟件中編寫提升機(jī)程序,并下載至控制器中;
(2)將裝滿廚余垃圾的垃圾桶(滿桶)推至工作位置,按下外部上升按鈕(X10置1),液壓泵運(yùn)轉(zhuǎn)(Y0、Y2置1),提升機(jī)開始勻速上升,PLC每0.5 s讀取一次質(zhì)量,讀取5次,取其平均值作為實(shí)際質(zhì)量,稱重顯示屏實(shí)時顯示垃圾質(zhì)量,稱重平均值經(jīng)程序處理,顯示到觸摸屏上;
(3)當(dāng)提升機(jī)到達(dá)上升限位時(X1置0),提升機(jī)上升停止(Y0置0),液壓泵停止(Y2置0),廚余垃圾自然倒出;
(4)當(dāng)廚余垃圾已完全倒出時,按下外部下降按鈕(X11置1),液壓泵運(yùn)轉(zhuǎn)(Y1、Y2置1),提升機(jī)開始勻速下降;
(5)當(dāng)提升機(jī)到達(dá)下降限位時(X2置0),提升機(jī)下降停止(Y1置0),液壓泵停止運(yùn)轉(zhuǎn)(Y2置0),將空垃圾桶(空桶)推至指定位置;
(6)間隔一段時間后,重復(fù)上述操作。
5.2 提升機(jī)液壓系統(tǒng)設(shè)計
圖13所示為提升機(jī)液壓原理圖,液壓系統(tǒng)主要包括液壓泵、油箱、液壓缸、溢流閥、減壓閥、單向閥、N型三位四通換向閥和壓力表等[10],其中溢流閥起恒壓和過載保護(hù)的作用,保證進(jìn)油壓力一直處于工作壓力;減壓閥起減壓作用,可以使液壓缸慢速縮回[14]。

圖13 提升機(jī)液壓原理
當(dāng)電磁閥1YA得電時,三位四通換向閥左位接通油路,液壓油從液壓泵流出,經(jīng)單向閥繼續(xù)向上,分為兩路,左油路未達(dá)到溢流閥設(shè)定壓力,暫時不通,上油路經(jīng)換向閥到達(dá)液壓缸底部,待壓力達(dá)到工作壓力時,液壓缸伸出,則提升機(jī)勻速上升,當(dāng)壓力大于溢流閥設(shè)定壓力時,溢流閥工作,保持進(jìn)油壓力在設(shè)定壓力左右,活塞桿腔液壓油經(jīng)單向閥、換向閥流回油箱。
當(dāng)電磁閥2YA得電時,三位四通換向閥右位接通油路,液壓油從液壓泵流出,經(jīng)單向閥向上,分為兩路,左油路未達(dá)到溢流閥設(shè)定壓力,暫時不通,上油路經(jīng)減壓閥到達(dá)活塞桿腔,待壓力達(dá)到工作壓力時,液壓缸縮回,提升機(jī)下降。
6 提升機(jī)改進(jìn)前后對比實(shí)驗(yàn)
廚余垃圾處理設(shè)備需要不間斷地進(jìn)行廚余垃圾質(zhì)量的統(tǒng)計,所以提升機(jī)需要配備垃圾稱重系統(tǒng)。圖14所示為改進(jìn)前、后提升機(jī),對圖中提升機(jī)進(jìn)行對比實(shí)驗(yàn)。

圖14 改進(jìn)前(a)、后(b)提升機(jī)
實(shí)驗(yàn)時,垃圾桶內(nèi)裝入100 kg垃圾,垃圾桶放置在提升機(jī)3 m處,從開始推滿桶,垃圾卸下,然后空桶到達(dá)收集區(qū)為一個計時周期,并且推垃圾桶時不能加速助推,需要全程勻速。由于改進(jìn)前地面裝有稱重平臺,所以需要兩名成年男性才可以較順利推上稱重平臺。對改進(jìn)前后提升機(jī)進(jìn)行6次垃圾桶提升實(shí)驗(yàn)并取其平均值,得出如下實(shí)驗(yàn)數(shù)據(jù)。
圖15所示為改進(jìn)前/后單人操作耗時實(shí)驗(yàn)數(shù)據(jù),改進(jìn)前單人操作耗時平均值在26 s左右,改進(jìn)后在17 s左右,可知改進(jìn)后單人操作時間減少了9 s左右。

圖15 改進(jìn)前/后單人操作耗時實(shí)驗(yàn)數(shù)據(jù)
圖16所示為改進(jìn)前/后雙人操作耗時實(shí)驗(yàn)數(shù)據(jù),改進(jìn)前雙人操作耗時平均值在18 s左右,改進(jìn)后為16.5 s左右,雙人操作時間縮短較少,沒有單人操作縮短效果明顯,而且實(shí)際操作也多為單人。

圖16 改進(jìn)前/后雙人操作耗時實(shí)驗(yàn)數(shù)據(jù)
從實(shí)驗(yàn)數(shù)據(jù)來看:改進(jìn)后單人操作提升機(jī)時所耗費(fèi)的時間比改進(jìn)前雙人操作所耗費(fèi)的時間還略有縮短,所以改進(jìn)后的提升機(jī)縮短了操作時間,提高了垃圾處理效率。
經(jīng)過多次實(shí)驗(yàn),不僅操作耗時有較大縮短,也可以清晰感受到改進(jìn)后比改進(jìn)前更省力,并且多次觀察發(fā)現(xiàn),提升機(jī)工作時的穩(wěn)定性與可靠性也大大提高,噪聲也相對較低,綜合性能大大提高。
7 結(jié)語
垃圾提升機(jī)是廚余垃圾處理設(shè)備中的重要部分,對提升機(jī)的結(jié)構(gòu)優(yōu)化與控制系統(tǒng)研究可以有效提高廚余垃圾處理設(shè)備的工作效率。作者在此基礎(chǔ)上,設(shè)計出基于三菱PLC控制的垃圾提升機(jī),利用Solid Works軟件對其結(jié)構(gòu)進(jìn)行建模優(yōu)化設(shè)計,對提升液壓缸進(jìn)行了受力分析與選型計算,利用ANSYS Workbench對該工況下液壓缸進(jìn)行靜力學(xué)分析,設(shè)計了電液控制系統(tǒng)。
研究結(jié)果表明:
(1)通過對提升機(jī)結(jié)構(gòu)進(jìn)行改進(jìn),并增加了稱重結(jié)構(gòu),使其在勻速提升中即可實(shí)現(xiàn)稱重,體積小,精度高;
(2)對提升機(jī)液壓缸進(jìn)行了受力分析與選型計算,得出了其工作時的最復(fù)雜工況,并對該工況下液壓缸進(jìn)行靜力學(xué)分析,得出液壓缸工作時的最大應(yīng)力為275 MPa,而45鋼的屈服強(qiáng)度為315 MPa;最大變形值為8.35×10-3m,由此證明,其應(yīng)力與變形都滿足工作要求;
(3)基于PLC控制,設(shè)置外部按鈕,更加方便操作,通過溢流閥、減壓閥和單向閥完成了液壓系統(tǒng)的恒壓、減壓和止回的作用,使提升機(jī)工作更加安全、穩(wěn)定、可靠;
(4)當(dāng)單人操作時,改進(jìn)后提升時間比改進(jìn)前減少9 s左右,且提升機(jī)工作更加穩(wěn)定、可靠,由此證明,改進(jìn)后提升機(jī)綜合性能大大提高,為廚余垃圾處理設(shè)備的進(jìn)一步發(fā)展奠定了基礎(chǔ)。
在后續(xù)的研究中,作者將對自動分揀結(jié)構(gòu)進(jìn)行設(shè)計,以提高廚余垃圾處理設(shè)備的自動化程度。
猜你喜歡
中國特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
當(dāng)代工人(2020年13期)2020-09-27 23:04:20
經(jīng)濟(jì)技術(shù)協(xié)作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(shù)(2017年11期)2017-12-20 08:10:57
工業(yè)設(shè)計(2016年12期)2016-04-16 02:52:00
IT時代周刊(2015年8期)2015-11-11 05:50:37
汽車維修與保養(yǎng)(2015年1期)2015-04-17 03:25:28
設(shè)備管理與維修(2015年12期)2015-04-09 06:57:00
