具有慣性補償的機器人變剛度碰撞傳感器研究
2023-10-07 03:54:02林義忠易雨晴秦琦航杜柳明梁科
機床與液壓 2023年17期
林義忠,易雨晴,秦琦航,杜柳明,梁科
(廣西大學機械工程學院,廣西南寧 530004)
0 前言
由于機器人手部的工作范圍大、運動軌跡復雜,極易與周圍的工件、設備或者人員發生碰撞,造成工件、設備損壞或者人員傷亡,降低工作效率,制約了機器人在更多人機協作領域的應用[1-5]。目前工業機器人末端常采用開關式碰撞檢測法(Collision Detection Switch,CDS)。該類傳感器安裝于機器人末端執行器與手腕之間,對末端執行器具有碰撞檢測和緩沖保護雙重作用。
為了抵抗機器人在啟停等沖擊狀態時末端執行器產生的較大慣性力,傳感器內部的壓緊彈簧就需要設置較高的預緊力。在相對平穩的工作狀態下,末端執行器的慣性力遠小于彈簧的預緊力,多余的預緊力會影響傳感器的碰撞靈敏度,進而制約了該類檢測方法在要求更高的人機協作場合的應用。與CDS方法類似,國內外有許多基于機械式的機器人碰撞檢測方法[6-7]。 TANAKA、ZHANG等[8-9]提出一種面向機器人友好型機器人碰撞力抑制系統,該反應系統可根據碰撞力的強度和碰撞時間將機械臂與腰部之間關節斷開,達到碰撞檢測及抑制作用,但該方法需要對已有機器人整體結構進行改進,普適性不強。李龍等人[10]提出一種仿蝗蟲腿的緩沖吸附機構,但只進行了仿真分析并沒有進行實驗驗證。TOMMASINO等[11]發明了一種新型抗沖擊的末端執行器,基于雙穩定結構實現了末端執行器和機器人運動學解耦,達到降低沖擊力的目的,但并未擺脫慣性力的影響且具有作用死區。此外還有許多基于位移的碰撞檢測和防撞機構[12-14],但并不適用于機器人末端執行器的碰撞檢測。
本文作者在現有CDS方法的基礎上設計了一種基于電磁伺服的變剛度機器人碰撞傳感器,在傳感器內部的預緊彈簧上疊加電磁力伺服裝置,根據機器人手部慣性力的變化提供實時的電磁補償力,既能夠保證傳感器具有較低的碰撞觸發力閾值,也能夠確保傳感器在沖擊狀態下有足夠的保持剛度,以抵抗機器人手部慣性力,保證碰撞傳感器在整個運行過程中都具有靈敏的碰撞檢測與安全防護功能。
1 傳感器結構與碰撞檢測原理
1.1 傳感器的基本結構
所設計的傳感器如圖1所示,主要由連桿部件、壓縮部件、彈簧、電磁伺服模塊、上下外殼及底板組成。其中連桿、定位凸輪和連接法蘭構成傳感器的連桿部件,壓蓋、壓桿和楔塊構成傳感器的壓縮部件。傳感器的連接法蘭與機器人的末端執行器相連,其底板與機器人的腕部相連。正常狀態下,受到彈簧壓縮力的作用,連桿錐面與上外殼內錐面相貼合,連桿部件保持穩定,傳感器運動計算的坐標系原點設置在連桿部件質心位置。

圖1 機器人變剛度碰撞傳感器
1.2 傳感器碰撞檢測原理
當機器人正常工作時,傳感器內部彈簧的預緊力用來平衡手部重力并保持機器人手部與腕部的剛性連接;當機器人末端執行器與周圍物體發生碰撞時,受到的碰撞力可能會有軸向壓力F、傾覆力矩M及回轉力矩T,如圖2所示。當碰撞力(力矩)超過設定力閾值時,壓桿下行使觸點開關閉合產生報警信號,這是現有的機器人CDS碰撞傳感器的基本原理。

圖2 傳感器碰撞受力示意
為了實現傳感器的變剛度和檢測的高靈敏度,在傳感器的預緊彈簧上疊加一個伺服電磁鐵,由較小的彈簧力和可變的電磁力的合力提供傳感器活動部件的預緊力,根據末端執行器的工作需要和慣性力狀態實時自適應地改變傳感器的預緊力,實現變剛度的目的。
2 傳感器預緊力電磁補償方法
2.1 電磁補償功能原理
機器人末端執行器的慣性力(含重力)通過傳感器連桿部件、壓縮部件和彈簧傳遞到機器人手腕,若單純由傳感器內部彈簧力來克服該慣性力,則需要設置較大的彈簧預緊力,且無法改變。引入電磁伺服裝置可以實現2個目標:(1)在啟動和停止等沖擊載荷較大的場合,提供較大的保持預緊力,以保證機器人整個手部有足夠的剛度和精度;(2)在低速平穩連續的工作過程中實現較小的預緊力和碰撞檢測的高靈敏度。
設末端執行器的質量為m,其質心O在傳感器坐標系中的位置為(xo,yo,zo),其任一時刻的加速度為(ax,ay,az)。傳感器電磁伺服控制裝置會根據末端執行器加速度信息實時控制伺服電磁補償力。電磁伺服力用來平衡變化的三維慣性力,加速度為控制輸入量,電磁力為控制輸出量,二者之間的運算關系是一個多維的線性變換關系,存在一定數據間的耦合關系。傳感器電磁力調節流程如圖3所示。
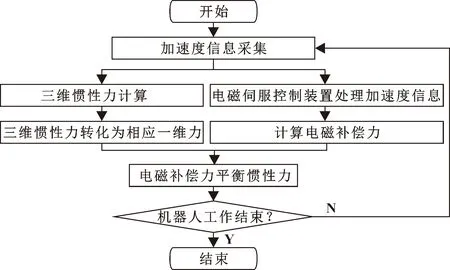
圖3 傳感器電磁力調節流程
2.2 傳感器電磁補償力分析計算
機器人末端執行器通過法蘭與傳感器進行剛性連接,末端執行器產生的慣性力(力矩)包含軸向力、回轉轉矩及傾覆力矩,通過傳感器內部結構轉化為壓縮彈簧的一維力。力的傳遞過程如圖4所示。

圖4 末端執行器慣性力(力矩)示意
慣性軸向力Fc=maz
(1)
慣性轉矩Tc=maxyo-mayxo
(2)
慣性傾覆力矩:
(3)
計算可得所需電磁補償力:
(4)
式中:FE1為平衡末端執行器慣性力的電磁力;l為定位球的中心到連桿中心的距離;α為定位凸輪凹槽傾斜角;R為連桿錐體部分最大直徑。
分析計算可得,平衡傳感器活動部件所需要的電磁補償力:
(5)
式中:m1為傳感器連桿部件的質量;m2為傳感器壓縮部件的質量;β為連桿與上外殼夾角。
為克服末端執行器及傳感器活動部件的慣性力,電磁伺服模塊需要產生的總的電磁補償力為
FE=FE1+FE2
(6)
3 動態碰撞實驗
3.1 傳感器碰撞力初始閾值的確定
根據傳感器的結構,初步確定彈簧剛度k=4.9 N/mm,彈簧預緊力為1.2 N,傳感器報警時彈簧碰撞壓縮量xp=2 mm,此時觸點開關接通所需力為3 N,則傳感器報警彈簧壓縮力Fsq=14 N。根據傳感器結構可計算得傳感器各項碰撞力/力矩閾值,剔除摩擦力的影響,如表1所示[15]。
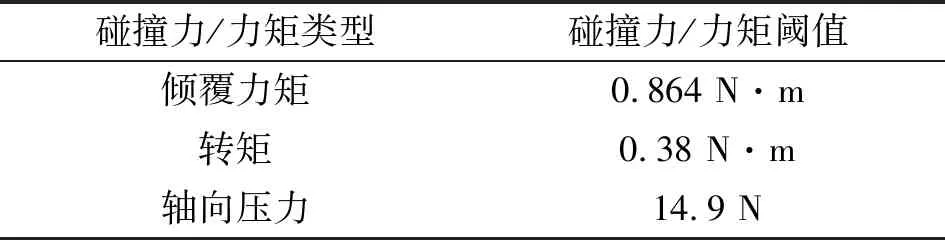
表1 碰撞傳感器初始閾值
3.2 實驗平臺搭建
為了能夠對傳感器的速度及位移做到實時的規劃與編程,實驗采用自己搭建的伺服電機驅動的直線運動導軌平臺,其中線性滾珠導軌有效行程為1.5 m,螺桿直徑0.02 m,螺距0.01 mm。伺服電機額定功率0.75 kW,額定力矩2.4 N·m,額定轉速3 000 r/min。因為成品的機器人底層運動控制程序均已固化,不方便修改和調整,實驗平臺如圖5所示。該伺服系統通過編程可以實現位置伺服、速度伺服和力伺服功能,其中的速度規劃功能包含勻速、線性加減速和S加減速等控制模式。碰撞桿代替機器人的末端執行器,采用組裝式結構,其尺寸和重力可方便調節。

圖5 動態碰撞實驗平臺
3.3 動態碰撞實驗
采用2種不同的速度規劃模式進行碰撞實驗,每一種速度模式下分別設置了2個碰撞點,通過調節傳感器在直線滑臺上初始位置實現,共包含1、2、3、4種情況,如圖6所示。圖6(a)中的加速度為1.5 m/s2,圖6(b)中的加速度為3.0 m/s2。設計動態碰撞實驗碰撞點如圖6所示。

圖6 傳感器碰撞過程速度變化曲線
同時,為了驗證電磁變剛度調節方法的可行性,分別采用兩種方法平衡末端慣性力:(1)關閉電磁伺服裝置,僅由彈簧力平衡末端慣性力,此時預緊力固定且數值較大;(2)開啟電磁伺服控制裝置,利用較小的彈簧力+變化的電磁力平衡末端慣性力,彈簧的初始預緊力可以設置得較小,電磁補償力根據末端加速度的變化做出實時計算和調節。碰撞中末端執行器分別受到傾覆力矩、轉矩和軸向力。
動態碰撞實驗中碰撞桿作為末端執行器與碰撞傳感器連接,碰撞傳感器通過底部螺紋固定在直線滑臺底座上,可實現不同位姿下碰撞,力傳感器固定在碰撞支架上,使碰撞桿與力傳感器發生碰撞,碰撞力值由力傳感器測量,在上位機實時顯示。如圖7所示:傾覆力矩動態碰撞實驗中傳感器速度與加速度沿傳感器X方向;轉矩動態碰撞實驗中傳感器速度與加速度沿傳感器X方向;軸向壓力碰撞實驗中傳感器速度與加速度沿Z軸方向。

圖7 動態碰撞實驗裝置
傳感器實驗參數:碰撞桿質心坐標(0,0,123.59),質量m0=1.497 kg;連桿質量m1=0.227 kg,壓縮部件質量m2=0.650 kg。傳感器尺寸:l=25 mm,α=45°,R=60 mm,β=60°。根據公式(1)—(6)和圖6中的加速度可計算得到平衡慣性力所需最大預緊力Fmax,如表2所示。不開啟電磁伺服裝置時,彈簧預緊力為Fmax。

表2 碰撞傳感器預緊力上限值
分別在電磁伺服和非電磁伺服狀態下進行了傳感器的碰撞實驗。根據傳感器結構參數、碰撞點位置和表1得到表3中碰撞點處測得的使傳感器靜態報警的碰撞力理論值,表4為傳感器動態碰撞力的測量值。
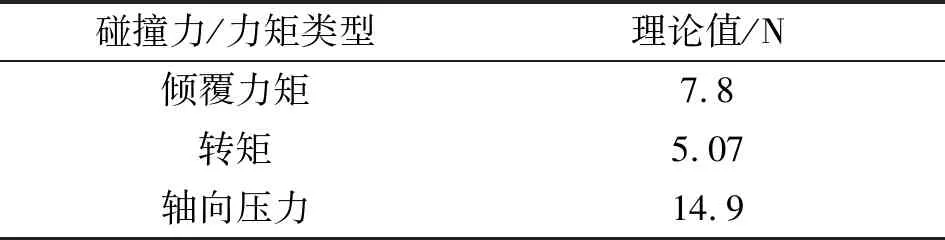
表3 傳感器靜態碰撞力理論值

表4 動態碰撞力測量值
分析表4中的第2和第4組數據可見:在非電磁伺服及勻速運動狀態下3種碰撞力測量值均大于電磁伺服方式下的碰撞力測量值。因為在勻速穩定狀態下傳感器承受的慣性力為0,伺服電磁鐵無需做慣性力補償,其輸出的電磁力為0,電磁伺服模式下碰撞力只需要克服較小的彈簧初始預緊力即可觸發;而在非電磁伺服模式下,碰撞力就需要克服較大的彈簧初始預緊力。表4中的實測值均大于表3中的理論值,因為碰撞力的理論值是計算的靜態力,未考慮摩擦力及沖擊動量的影響。
表4中的第1和第3組數據是在加速運動狀態下測得的碰撞力,第1組的加速度為1.5 m/s2。分析數據可見:非電磁模式下3種碰撞力測量值均比電磁模式時大,說明電磁補償模式下傳感器的閾值低、靈敏度高;第3組采用較高的加速度3.0 m/s2,此時2種模式下碰撞力的測量值基本一致,因為隨著加速度與慣性力的增加,用于克服慣性力的電磁伺服力隨之增加,傳感器總的預緊力接近非電磁模式下的預緊力Fmax,對應的碰撞力就比較接近。說明電磁補償力可以平衡不同速度下的慣性力,該方法在一定程度上消除了慣性力對傳感器閾值的影響,提高了碰撞傳感器檢測的靈敏度。
4 結語
為了進一步提升機器人碰撞檢測傳感器的靈敏度和可靠性,提出一種電磁變剛度補償方法,在傳統機械式碰撞傳感器的基礎上引入了慣性補償和電磁伺服功能,用電磁伺服力實時調節傳感器的預緊力,以適應末端執行器在運動中變化的慣性力,實現碰撞傳感器剛度的自適應變化,提高動態檢測的靈敏度。實驗結果驗證了該方法在動態碰撞檢測的有效性,實現了高靈敏度及變剛度的目的,使該類機器人碰撞傳感器在人機協作領域中具有了更大的應用價值。
