基于ITN的網球陪練機器人的研制與測試
2023-10-14 03:01:02鈕鳴宇鈕德明
大眾科技 2023年9期
關鍵詞:學生
鈕鳴宇 鈕德明
基于ITN的網球陪練機器人的研制與測試
鈕鳴宇1鈕德明2
(1.廣西醫科大學,廣西 南寧 530021;2.廣西理工職業技術學院,廣西 崇左 532200)
為在高校推行國際網球聯合會推出的非職業網球選手水平評定的測試方法(簡稱ITN),研制了一種基于ITN的網球陪練機器人,并闡述了它的工作原理和結構特點。為驗證它的功能和效果,進行了應用測試。測試結果表明:該機器人有助于初學者進行基礎動作練習;有利于擊球技術的鞏固和提高;有效地增加了訓練強度;解決了教練和場地不足的問題,提高了訓練效果。該機器人應用于網球訓練教學,具有成本低、功能強、效果好等特點,是一種值得推廣的“機器教練”。
網球;陪練機器人;擊球;球感
引言
長期以來,如何對普通高等院校網球課程的學生所掌握的網球技術進行真實的測評始終是個問題,以往使用的評價方式更偏重于擊打的精度而忽視了擊打的力度,因此難以顯示被測試者的真實水平。國際網球聯合會推出了非職業網球選手水平評定的測試方法[1](簡稱ITN),較好地利用網球技術水平三要素:穩定、球速、準確來綜合評價高校網球教學班的學生所掌握的網球技術水平[2]。為了在普通高等院校推行ITN,需要研制一種基于ITN的網球陪練機器人來作為輔助網球訓練教學的“機器教練”[3-8]。采用基于ITN的網球陪練機器人輔助網球的訓練教學,能有效地增加學生課內訓練的時間;能使初學者的球感獲得較快提升;能讓學生按教師的要求,反復練習設定的網球基本技術和動作,使學生的網球基本技術得以迅速提高。通過一個學期的應用測試,驗證了網球陪練機器人在網球訓練教學中的效果,是一種值得大力推廣的“機器教練”。
1 基于ITN的網球陪練機器人的機構設計
1.1 基于ITN的網球陪練機器人的總體設計
網球陪練機器人應具有“機器教練”的功能:一是按訓練要求拋出一定力度、角度、速度、頻率的球讓練習者擊打;二是對練習者擊打球的準確性、擊球速度和擊球個數有考核記錄。為實現“機器教練”的功能,網球陪練機器人的總體設計如圖1所示。網球陪練機器人[9]由牽拉帶組件、框架、球網、網球測速器、鉸鏈組件、攔球網、收集網球兜、支架、拋球機組成。其中,在框架和支架的下部安裝牽拉帶組件,在其上部裝有鉸鏈組件,打開框架和支架時,它們構成穩定的三角架;網球測速器用螺栓固定在框架中部,當網球被擊打而穿過雷達測速區時,球速被網球測速器記錄下來;在支架上安裝攔球網,在框架和支架的下部安裝收集網球兜,當網球被擊打在攔球網上時,網球隨即從攔球網表面滾進收集網球兜,然后進入拋球機的網球收集機構;在框架下部中央安放一臺拋球機,它以一定速度和頻率將網球收集機構內的網球拋至練習者的擊球位置,還可以按照練習者的要求拋出不同弧度和不同距離的球,供練習者練習設定的擊球技術和動作。練習者將球擊打進框內,才為有效,否則,球打飛了,練習球越來越少,也就不能連續練習下去。當本次練習完成,可查看控制器上記錄的擊球個數和擊球速度。
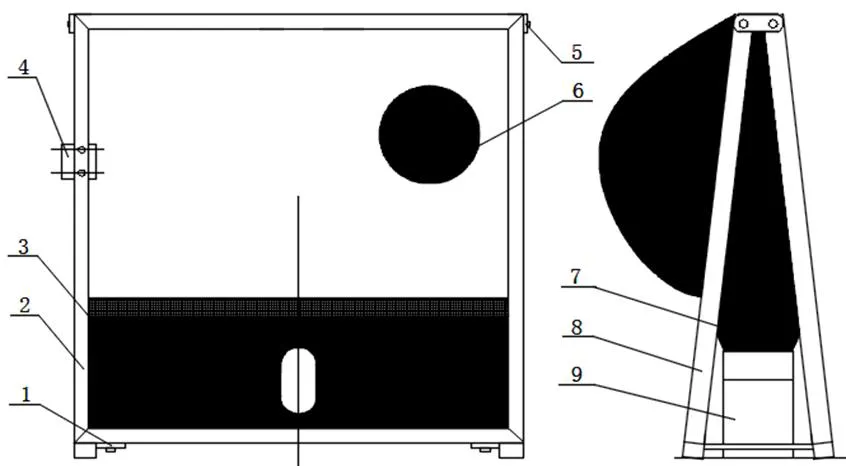
1—牽拉帶組件;2—框架;3—球網;4—網球測速器;5—鉸鏈組件;6—攔球網;7—收集網球兜;8—支架;9—拋球機。
1.2 網球拋球機的機構設計
網球拋球機[10]是網球陪練機器人的關鍵部分,它主導了網球的拋出和回收。如圖2所示,網球拋球機由滾輪、機座、拉桿、機殼、調控盒、機架、進球管、螺栓、網球收集機構、落球撥叉、出球角調節器、摩擦輪、彎管輪、可彎曲射球管、擺動機架、摩擦管、步進電機和驅動絲桿、定位柱組成。
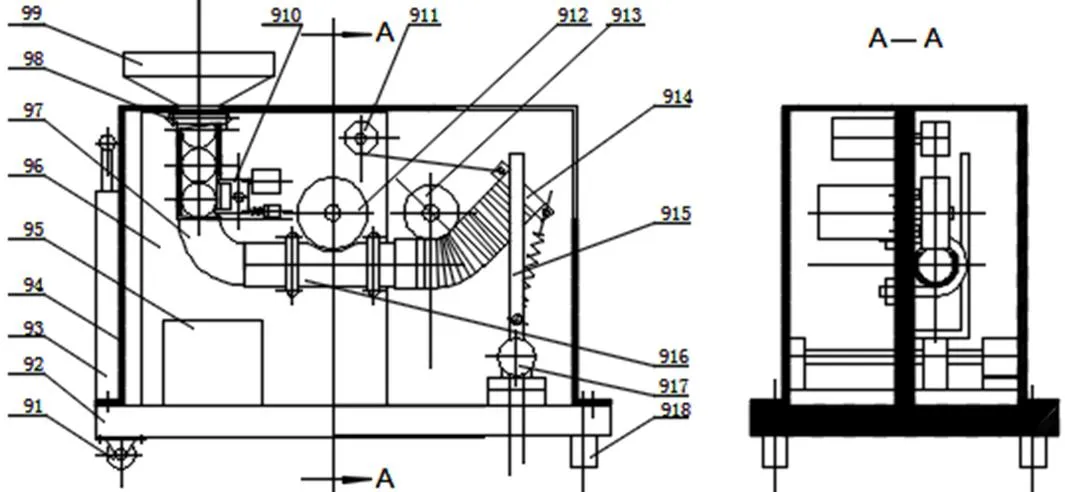
91—滾輪;92—機座;93—拉桿;94—機殼;95—調控盒;96—機架;97—進球管;98—螺栓;99—網球收集機構;910—落球撥叉;911—出球角調節器;912—摩擦輪;913—彎管輪;914—可彎曲射球管;915—擺動機架;916—摩擦管;917—步進電機和驅動絲桿;918—定位柱。
在機座下方安裝有滾輪和定位柱;機殼安裝在機座上方,機殼的右上角是網球的拋出口;機架與機座連接,拋球機的構件安裝在機架上。網球收集機構由集球盤和螺旋滾道組成,它可有效避免多個網球擠兌而進不了出球中心孔;送球機構由進球管、落球撥叉、電磁鐵組成,在電磁鐵的作用下,落球撥叉按設定頻率將網球送入摩擦管;發射機構由摩擦管、摩擦輪、直流電機組成,直流電機和摩擦輪直接連接,直流電機帶動摩擦輪高速旋轉,摩擦輪將動能傳遞到摩擦管內的網球上,網球獲得動能而被射出;出球角調整機構由可彎曲射球管、出球角調節器、步進電機組成,出球角調節器采用步進電機驅動,出球角調節器通過鋼絲繩的拉緊,或放松,可將可彎曲射球管的彎曲角變小或增大,不同的出球角,可以送出不同弧度、不同距離、不同落點的球。在機座上安裝擺動機構,擺動機構由擺動機架、步進電機和驅動絲桿組成,在步進電機和驅動絲桿的驅動下,擺動機架帶動可彎曲射球管作橫向擺動,調節可彎曲射球管的擺動角。網球拋球機的功能模塊如圖3所示。
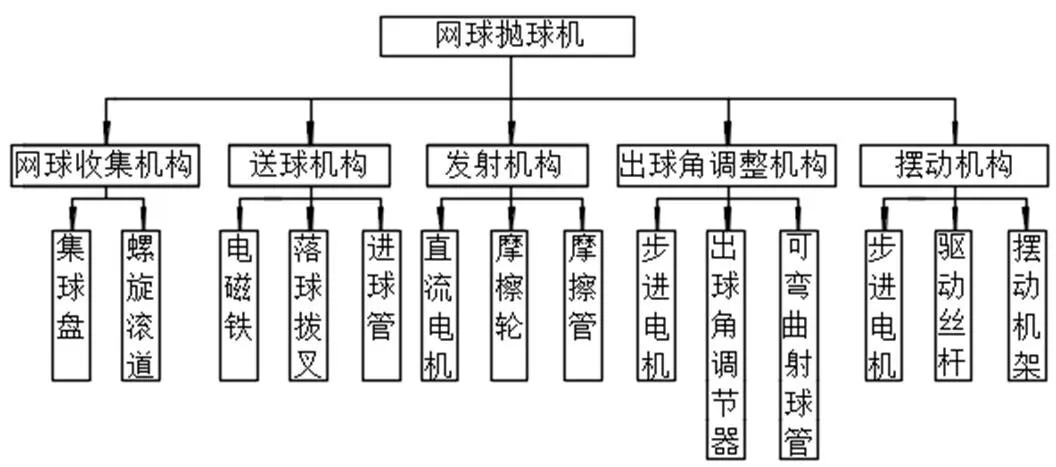
圖3 網球拋球機的功能模塊
1.3 基于ITN的網球陪練機器人的控制系統設計
1.3.1 硬件設計
以嵌入式微處理器STM32F103ZET6作為硬件系統的控制核心,其功能是將按鍵信號通過解碼,轉化為相應的控制電平,最后由相應單元電路驅動執行元件完成要求的操作。其硬件系統如圖4所示。
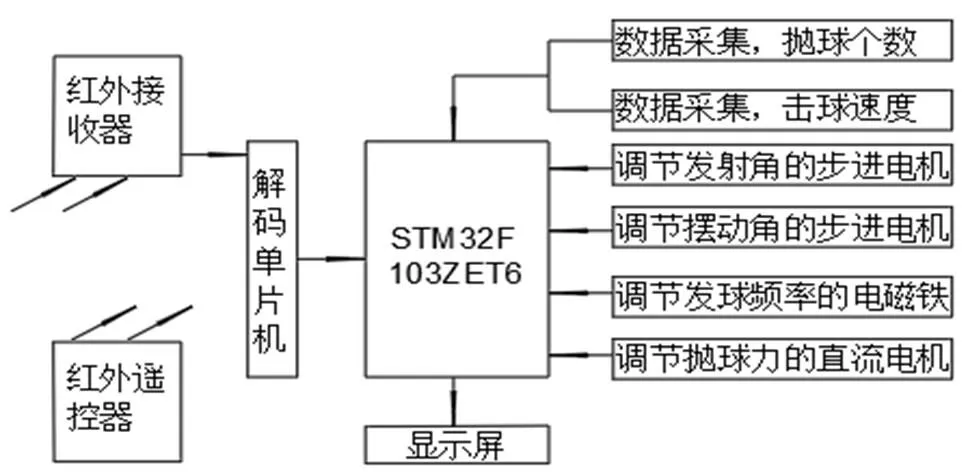
圖4 系統控制框圖
1.3.1.1 嵌入式微處理器STM32F103ZET6
嵌入式微處理器STM32F103ZET6以Cortex-M3為內核,擁有更卓越的性能、更高的代碼密度、更寬的應用面、更具實時特性、低功耗、低成本等眾多優點。
STM32F103ZET6的工作頻率為72 MHz;內置高達512 K的 FLASH存儲器和64 K的RAM內存,其中,FLASH存儲器支持在線編程;具有豐富的通用I/O端口。
1.3.1.2 紅外發射和接收系統
采用遙控器芯片TC9148P構建一對紅外發射和接收系統,分別安裝在網球拋球機紅外接收器和紅外遙控器上。當按下遙控器某鍵時,其信號發生器發出8路不同時序的掃描脈沖,依次掃描鍵盤,將獲得的按鍵值調制成串行編碼脈沖,該脈沖再經過驅動電路由紅外二級管發射出去。當紅外接收器接收到光信號后,經過光電放大電路、專門解碼芯片將其復原成串行編碼脈沖,然后由嵌入式微處理器按照編碼或解碼的協議轉化為相應的控制電平,最后由相應單元電路驅動執行元件完成要求的操作。
1.3.1.3 驅動模塊
控制直流電機的轉速來調節網球拋球機的拋球力大小,控制步進電機的左右旋轉步距角來調整網球拋球機的發射角和擺動角,這就要求驅動電路必須具有調速精準、驅動平順、價格便宜等優勢。L298N 功率集成芯片滿足驅動電路的要求,選用L298N功率集成芯片來驅動繼電器、線圈、直流電機、步進電機、電磁鐵等元件,其驅動電壓可達46 V,直流電流總和可達4 A,內部有2個PWM功率放大器。
1.3.1.4 數據采集器
系統需要采集的數據有拋球機拋球個數、運動員擊球個數以及球速。
網球拋球機拋球個數通過統計出球控制器的電磁鐵開關次數實現。電磁鐵開關連接至STM32F103ZET6的PA0引腳,配置該引腳為外部中斷輸入,拋球機每拋出一個球,電磁鐵開關形成一個有效的觸發信號觸發拋球計數器計數。
系統采用CSP100球類測速系統測量擊球速度。測速原理是根據接收到的反射波頻移量的計算而得出被測物體的運動速度,STM32F103ZET6通過串口讀取速度值并顯示至TFT-LCD。根據運動規律,球速大于某個值時記為有效擊球。
1.3.1.5 顯示屏
系統配置7寸TFT-LCD,該顯示屏控制器ILI9341自帶顯存,容量為172 800 Byte,顏色數據存儲格式為RGB565,分辨率為1 024*600。在顯示系統設計中,TFT-LCD被設計成SRAM模式與STM32F1032ET6的FSMC接口通信,實時顯示拋球機拋球個數、運動員擊球個數以及球速等數據信息。
1.3.2 軟件設計
軟件主程序主要包括實現初始化、識別接收紅外信號、執行按鍵操作和啟用子程序等功能。初始化程序為系統通電后做好準備,當接收到紅外遙控器發送的信號后,判別獲得的按鍵值,然后將按鍵值傳給嵌入式微處理器。嵌入式微處理器根據所得按鍵值執行對應的功能操作,同時在顯示屏上顯示正執行的功能操作狀態,其程序控制模塊如圖5所示。
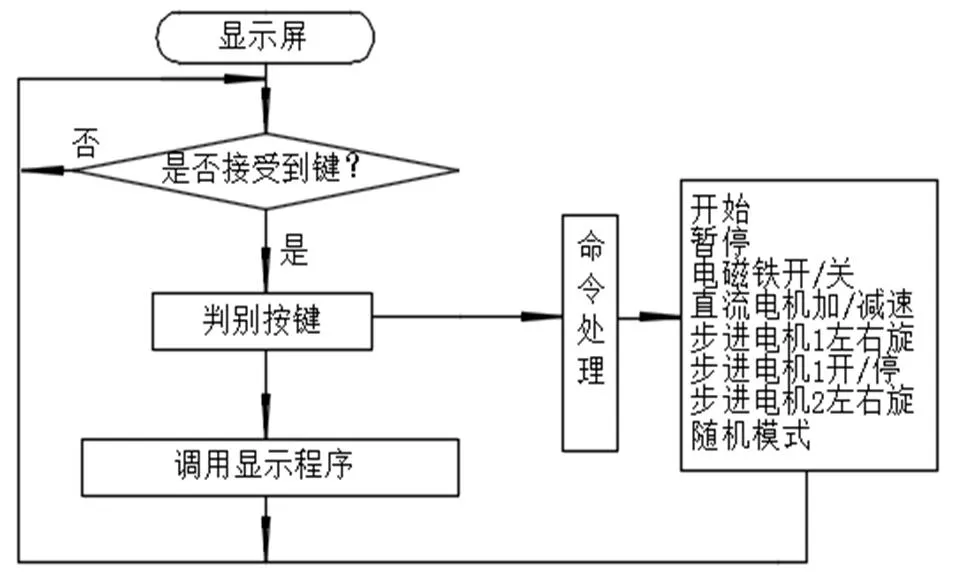
圖5 總控模塊
直流電機的調速方式都采用脈寬調制(PWM)。嵌入式微處理器的高級定時器和通用定時器均可以產生和輸出PWM信號,其中高級定時器TIM1和TIM8可以同時產生多達7路的PWM輸出。本系統采用高級定時器TIM1產生的PWM信號實現直流電機調速。程序配置步驟為:(1)開啟TIM1時鐘,配置PA9為復用輸出;(2)設置TIM1_CH2重映射到PA9;(3)設置TIM1的ARR和PSC;(4)設置TIM1_CH2的PMW模式;(5)使能TIM1的CH2輸出,使能TIM1;(6)修改TIM1_CCR2實現調整占空比,達到調速的目的。
控制步進電機轉動的脈沖控制信號采用定時中斷的方式產生,改變定時時間,即可改變脈沖頻率,從而改變步進電機的轉速。擺動機構在某角度內擺動時,根據擺動角度和步距角計算出步進電機轉動所需的脈沖數Ⅳ(取偶數),然后反復動作:正轉Ⅳ個步距角和反轉Ⅳ個步距角,以此實現擺動功能。出球角調整機構實現發射角調整的原理同上。出球角調整機構和擺動機構都采用兩相步進電機,用半步勵磁法實現0.9度的步距角,其脈沖分配由軟件方法實現。程序流程如圖6所示。需調速時,通過查表改變進入中斷的定時時間即可。
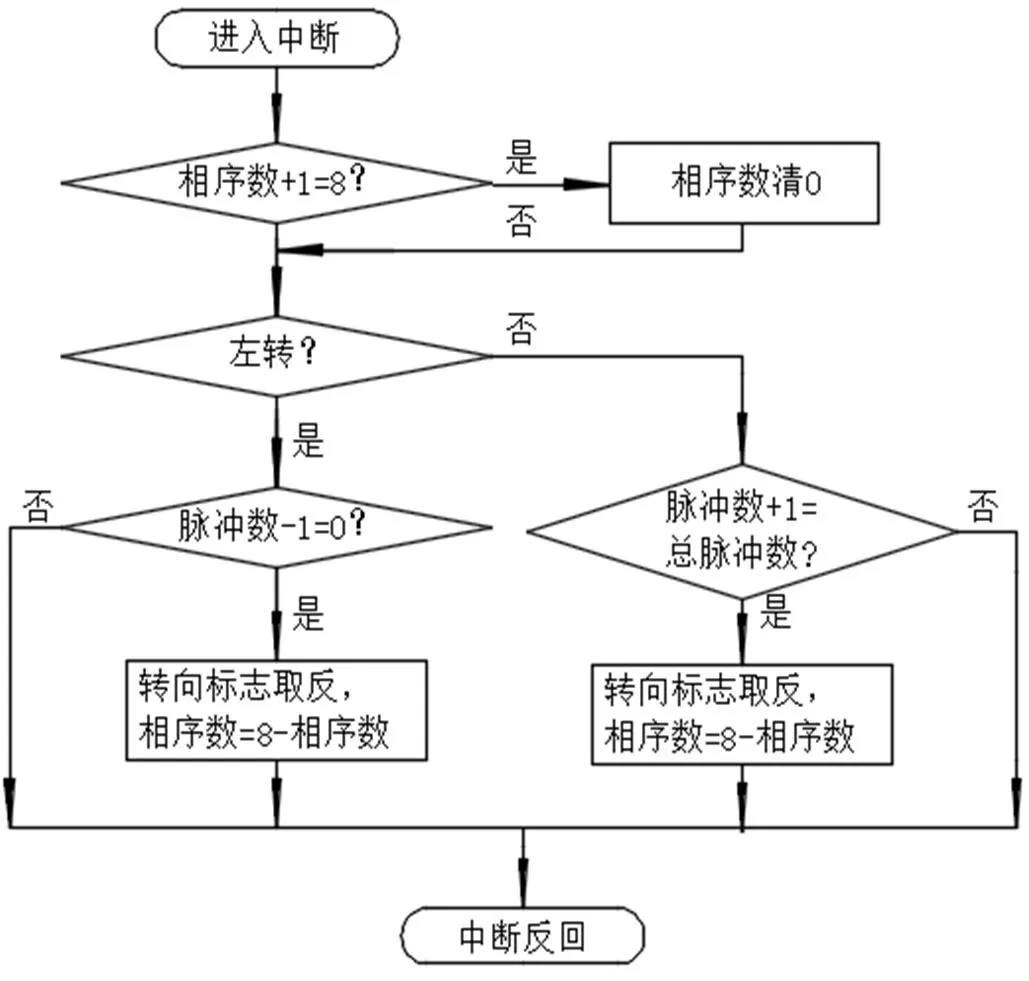
圖6 步進電機程序流程圖
2 基于ITN的網球陪練機器人的應用測試
2.1 用于測試樣機的主要功能及參數
主要功能:(1)通過遙控器遙控拋球速度、出球頻率、出球模式;(2)擊球數量及擊球速度統計分析功能。
主要參數:(1)拋出網球速度:20~140 km/h;(2)出球間隔時間:2~10 s;(3)發射角調節范圍:300°~750°;(4)擺動角調節范圍:-150°~+150°;(5)擊打進框的網球測速:20~320 km/h。
2.2 測試對象
選取廣西醫科大學大二網球選修女生班的學生為測試對象,該班級學生都是初學者,隨機將該班分成測試組和對照組,每組20人。
2.3 測試目的、內容及方法
測試目的是驗證網球陪練機器人所具有的功能是否有助于網球訓練教學,采用網球陪練機器人來輔助網球教學,與傳統的網球教學方法作比較,在分析測試結果的基礎上,總結采用網球陪練機器人輔助網球訓練教學對提高高校網球課教學質量和效率起到的作用。
測試內容是按教學大綱要求安排網球運動中應用最多的一項技術,即正、反手擊球練習[11]。
測試方法如下:對照組采用常規教學方法,采取一人“喂球”,學生一球一擊,輪流在球場上完成正、反手擊球練習;測試組采用網球陪練機器人輔助練習,正、反手擊球訓練的方法如圖7所示:要求學生站在離網球陪練機器人5 m的地方,擊球時,做好完整的正、反手擊球動作,并控制好力度。當網球被拋出落地后,將網球擊打到框架內,接著網球拋球機會按一定頻率拋出網球,練習者通過不斷地擊打,一輪練習,直到三個球都打飛且無球進框架內,造成無球拋出為止;當擊球的精度和力度都提高后,站位逐步向后移,移到8 m后,仍能連續多回合的將球擊打到框架內。其目的是訓練學生掌握正、反手擊球動作的力度和精度,以及擊球動作的完整性;培養盯球、跑位、擊球的有機協同球感[12]。每次課需完成100個正反手擊球的訓練球數,數量可以累計,要求每輪連續三次以上的擊球進入網球陪練機器人的框架內,才能計入訓練球數。
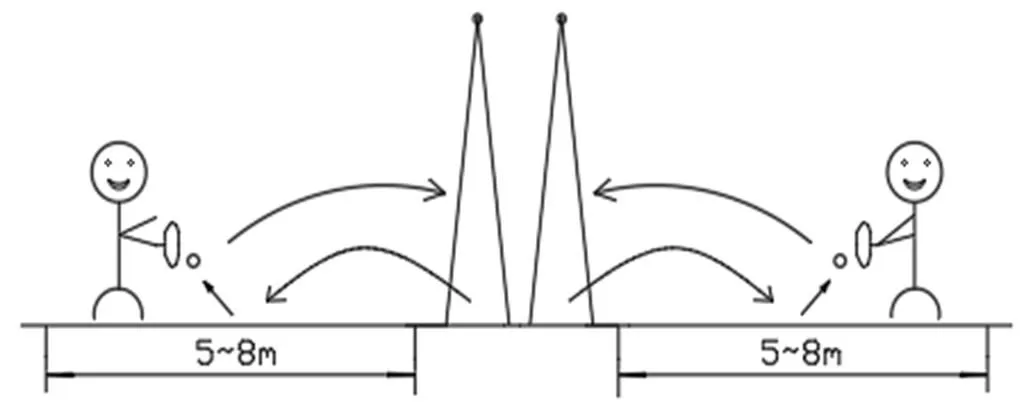
圖7 連續多回合正、反手擊球練習
2.4 考核與評價方式
18周的課程結束后,對測試組和對照組的學生按ITN要求進行考核。
對測試組和對照組的測試結果進行評分。正反手定位擊球評分標準是:正反手定位擊球落到指定區域的球[1],一個計兩分,每個學生正反手定位擊球各10個,滿分為40分;正反手擊球動作評分標準是:能按動作要領完成揮拍動作的,記9分;揮拍動作連貫、有力的,記12分;揮拍動作協調流暢、動作規范,擊球質量高的,記15分;綜合成績為正反手定位擊球的考核成績,滿分為55分。
3 結果與分析
對測試組和對照組進行考核測試,測試結果是:正手定位擊球落到指定區域的個數,測試組最高10個,2人,最低6個,2人,平均成功率為82%;對照組最高9個,2人,最低5個,3人,平均成功率為68%。反手定位擊球落到指定區域的個數,測試組最高10個,2人,最低6個,2人,平均成功率為79%;對照組最高9個,1人,最低5個,3人,平均成功率為66%。測試組和對照組測試結果及考核成績均呈正態分布,運用體育統計學[13]作統計分析,并作檢驗,結果見表1。
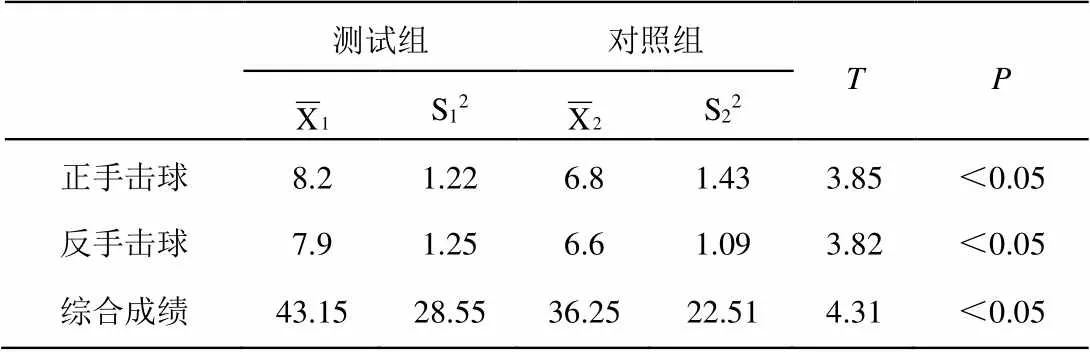
表1 測試組和對照組正反手擊球考核成績對比表
注查檢驗臨界值可知:當=3時,=,因為||>0.05,所以<0.05。
以穩定性、準確性、動作完整性等三個維度對正反手擊球技術進行綜合分析評價[14]。從表1中可以清楚地發現:相較正手擊球的平均成功率,測試組比對照組高出14.0%;反手擊球平均成功率對比中,測試組比對照組高出13.0%;因為||>38 0.05,所以<0.05,兩者有顯著性差異。從這些數據可以看出,測試組的學生正手、反手擊球成功率均顯著高于對照組的學生,說明網球陪練機器人有助于提高學生正、反手擊球的力度和精度,以及擊球動作的完整性。表1還顯示:測試組的學生正、反手擊球考核平均成績高于對照組6.9,因為||>0.05,所以<0.05,顯示兩者有顯著性差異。數據表明測試組的學生動作的完整性要顯著好于對照組的學生,說明網球陪練機器人有助于提高學生的正反手擊球質量和固定學生的正、反手擊球動作。
從應用測試可以看到:網球陪練機器人拋球的力度、高度、落點的重復率高,有助于學生基礎動作的練習,所以測試組不僅正、反手定位擊球平均成功率高于對照組,而且對網球訓練不積極的學生的最低擊球落到指定區域的個數也高于對照組;網球陪練機器人可按擊球動作需要,拋出不同速度、不同弧度、不同距離、不同頻率的球,學生上手快,練習機會多,從量變到質變,正是一次次的擊球練習,使初學者掌握了擊球的力量和時機,有利于提高擊球質量,對督促學生學習和練習有積極的作用;網球陪練機器人能對擊中框內的網球個數和球速進行統計分析,這促使學生為了保持一定球速度下而不打飛球,在擊球練習中就會增強注視擊球落點的意識,提高了擊球的準確性和力度;網球陪練機器人能回收擊中框內網球,重復使用,學生不因撿球而耽誤練習,有效地增加了訓練強度,增強了信心和興趣,不積極的學生也能獲得一些收獲;網球陪練機器人能與學生一對一、或一對二配對進行訓練,解決了高校網球教練和場地不足的問題,提高了教師的教學效率[15]。
4 結論
以嵌入式微處理器STM32F103ZET6作為基于ITN的網球陪練機器人的控制核心,從而有效地實現了該機器人遙控拋球速度、出球頻率、出球模式,以及擊球數量及擊球速度統計分析的功能。經過一個學期的測試驗證,該機器人有助于學生基礎動作的練習;有利于擊球技術的鞏固和提高;有效地增加了訓練強度;解決了教練和場地不足的問題,增強了訓練效果。該機器人應用于網球訓練教學,具有成本低、功能強、效果好等特點,是一種值得大力推廣的“機器教練”。
[1] 孫衛星,陳勇等. ITN網球技術水平測試的實用研究[J].山東體育大學學報,2013,29(2): 87-90.
[2] 黃波. 高校網球課程考核、評價方法的測試性研究[J]. 北京體育大學學報,2007,30(11): 1552-1554.
[3] 劉玲,靳伍銀,等. 基于STM32自動網球拾取機器人設計[J]. 南京信息工程大學學報(自然科學版),2020,12(5): 609-613.
[4] 郭天宇,艾文浩,孫長富,等. 基于凸輪機械手的自動網球拾取機器人設計[J]. 無線互聯科技,2019(12): 52-54.
[5] 肖華,黃河,謝模焱. 全方位移動式網球機器人的研究與設計[J]. 機電工程,2015,32(4): 509-515.
[6] 孫宏達,張洪霞. 網球服務機器人系統設計[J]. 黑龍江八一農墾大學學報,2019,31(5): 108-111.
[7] 謝小英,曹偉. 一種羽毛球陪練機器人的結構設計[J]. 機械設計與制造工程,2019,48(11): 43-47.
[8] 鈕鳴宇,黎子瓊. 網球訓練模擬器在高校網球教學中的使用方法及效果[J]. 大眾科技,2019,21(1): 72-74.
[9] 甘小梅,覃薛宇,鈕鳴宇,等. 一種網球陪練機器人: 中國,202020694563.6[P]. 2021-3-30.
[10] 鈕鳴宇,甘小梅,梁飄,等. 一種網球拋球機: 中國,202020549189.0[P]. 2021-1-26.
[11] 李國軍,楊海平. 動作技能連續體理論在網球正反手擊球技術教學中的應用研究[J]. 廣州體育學院學報,2014,34(5): 64-66.
[12] 梁瀟,王恒. 不同多球訓練方案在網球教學中的應用研究[J]. 廣州體育學院學報,2015,35(4): 116-120.
[13] 雷福民. 體育統計方法與實例[M]. 北京: 北京高等教育出版社,2017.
[14] 王海明. 女子網球競技水平診斷指標體系的構建[J]. 武漢體育學院學報學報,2008,42(11): 54-57.
[15] 于南得. “網球墻”的建設與網球教學效果的評價[D]. 西安: 西安體育學院,2012.
Development and Testing of Tennis Sparring Robot Based on ITN
In order to implement the test method of non-professional tennis player's level evaluation introduced by International Tennis Federation in universities(referred to as ITN), a tennis sparring robot based on ITN is developed, and its working principle and structural characteristics are described. In order to verify its function and effect, the application test is carried out. The test results show that the robot is helpful for beginners to practice basic movements; it is beneficial to consolidate and improve the batting technique; it effectively increase the training intensity; the problem of lack of coaches and venues was solved, and the training effect was improved. The robot is used in tennis training teaching, and has the characteristics of low cost, strong function and good effect. It is a kind of "machine coach" worthy of promotion.
tennis; sparring robot; bat; feel of the ball
TP242
A
1008-1151(2023)09-0037-05
2022-11-24
2020年度廣西高校中青年教師科研基礎能力提升項目(2020KY71003)。
鈕鳴宇(1983-),女,廣西醫科大學體育部講師,研究方向為網球教學與訓練、體育器械。
鈕德明,男,廣西理工職業技術學院教授,研究方向為自動化設備研制。
猜你喜歡
作文大王·笑話大王(2021年4期)2021-04-26 19:00:35
英語文摘(2020年9期)2020-11-26 08:10:12
甘肅教育(2020年6期)2020-09-11 07:45:16
甘肅教育(2020年22期)2020-04-13 08:10:54
甘肅教育(2020年20期)2020-04-13 08:04:42
當代陜西(2019年5期)2019-11-17 04:27:32
電影(2018年9期)2018-11-14 06:57:21
作文世界(小學版)(2018年4期)2018-10-16 17:13:34
快樂作文·低年級(2016年12期)2017-01-03 20:52:44
快樂作文·低年級(2016年6期)2016-06-24 18:58:40