低轉速航空發動機滾動軸承故障深度異常檢測方法
2024-04-20 09:03:12康玉祥盛嘉玖尉詢楷
振動與沖擊 2024年7期
康玉祥, 陳 果, 盛嘉玖, 王 浩, 尉詢楷
(1. 南京航空航天大學 民航學院, 南京 210016;2. 南京航空航天大學 通用航空與飛行學院, 江蘇 溧陽 213300; 3. 北京航空工程技術研究中心, 北京 100076)
滾動軸承作為旋轉機械中通用且關鍵的組成部件,其一旦發生故障輕則增加維修維護成本、重則設備失效,甚至人員傷亡。有統計顯示,對于某型列裝的航空發動機,已先后發生數十起由主軸承損傷故障而引起的飛機空中停車或飛機迫降事故,造成了數十億元的經濟損失。為此,探究精確、高效、智能的地面監控手段,使得發動機在啟動或搖轉等低轉速(轉速<600 r/min)狀態下即可實現對主軸承故障的監控,對于保障飛行安全,降低維修維護成本有重要的意義[1]。
聲發射(acoustic emission,AE)檢測技術是當前低轉速下滾動軸承故障檢測的有效手段之一。AE檢測儀器采集材料在裂紋擴展時所產生的彈性波,通過對AE信號進行分析進而完成診斷[2]。其中,Teager 峰值能量[3]、EMD[4]等方法在基于AE信號的低轉速滾動軸承的故障診斷中均有不同程度的應用。當前,雖然基于AE技術的低轉速滾動軸承故障診斷取得了一定的效果。但是,對于低轉速狀態的航空發動機滾動軸承而言,由于無法直接在軸承座位置處安裝AE檢測裝置,只能通過機匣測點進行AE信號的采集,使得所獲得的故障AE信號更加微弱,因此,難以精確實現低轉速航空發動機滾動軸承的故障診斷。
振動信號處理是低轉速滾動軸承故障診斷的另一種有效手段。Mishra等[5]采用小波分析實現了低轉速滾動軸承的故障診斷。Wang等[6]針對15 r/min的滾動軸承,采用EMD方法實現了其故障診斷。Sandoval等[7]研究了一種譜熵和排列熵的低轉速滾動軸承故障診斷方法,取得了不錯的效果。Han等[8]采用EEMD方法和Teager能量算子實現了轉速為20 r/min的滾動軸承故障診斷。當前,針對低轉速滾動軸承振動信號的分析主要以軸承座測點的信號為主,且多為恒定轉速下的平穩信號。然而,對于航空發動機而言,其振動信號的測點布置于機匣位置,由于傳遞路徑的影響,使得所能監測到的故障信號更加微弱[9]。同時,航空發動機在進行低速搖轉檢測時,所采集的振動信號為非穩態信號,也導致此時的故障很難被檢測。此外,低轉速下滾動軸承故障振動加速度信號具有特征微弱、頻率低、沖擊間隔時間長且易受噪聲影響等診斷難點。因此,單純地采用現有的信號分析方法很難實現基于機匣測點的低轉速航空發動機滾動軸承故障診斷。同時,由于航空發動機這類不能帶“病”運行的系統,往往很難獲取甚至無法獲取低轉速故障狀態的樣本,因此,也無法直接采用有監督深度學習算法實現故障的智能診斷。
鑒于此,本文以低轉速航空發動機滾動軸承為研究對象,采用僅依靠正常樣本進行訓練的深度異常檢測(deep anomaly detection,DAD)方法,研究在恒定低轉速和搖轉狀態下基于機匣測點的航空發動機滾動軸承的故障檢測。結果表明,在設置合理的閾值后,本文所提方法能夠精確地實現低轉速滾動軸承的故障檢測,且檢測精度能夠達到93%以上。
1 基于ViT的深度支持向量描述方法
2018年Ruff等[10]將深度學習和SVDD相結合,提出了深度支持向量描述(deep support vector data description,DSVDD)模型。DSVDD構建了正常域的超球體,通過判斷當前樣本經過映射后是否處于該超球體內而完成檢測。本文在DSVDD的基礎上,引入Vision Transformer(ViT)[11]網絡作為主干網絡,提出基于ViT的深度支持向量描述方法 (deep support vector description method based on ViT,ViT-DSVDD),用于實現低轉速滾動軸承故障的異常檢測。在模型訓練過程中對原始的一維振動加速度信號進行快速傅里葉變換(fast Fourier transform,FFT),以變換后的結果作為模型的輸入。在完成模型的訓練并制定邊界閾值后,通過所制定的閾值判斷當前輸入是否異常。
1.1 DSVDD
DSVDD的基本原理如圖1所示。其使用大規模正常訓練數據進行學習,得到一個權值為w的深度神經網絡變換φ(xi;w),φ(xi;w)將大多數輸入空間的數據表示映射到輸出空間的一個最小超球內,正常和異常樣本經φ(xi;w)映射后分別落入超球內部和外部。DSVDD在初始樣本輸入和訓練過程中無需人工對樣本進行標簽化處理,因此,DSVDD是一種無監督的異常檢測方法。

圖1 DSVDD的基本原理Fig.1 Basic principles of DSVDD
DSVDD中權值為w的深度神經網絡變換φ(xi;w)可采用CNN、LSTM等模型。通過建立如式(1)所示的目標函數,借助隨機梯度下降算法(stochastic gradient descent,SGD)完成網絡的訓練。

(1)

1.2 ViT-DSVDD模型
為提高低轉速滾動軸承異常檢測的精度,在DSVDD的基礎上,提出了ViT-DSVDD方法。該方法包括一個用于特征提取的ViT網絡,一個用于構建損失函數的三層自編碼器。
ViT-DSVDD模型用于低轉速滾動軸承故障檢測時的計算流程為:
(1) 采集滾動軸承振動加速度信號,并按照1 s采樣時長保存為不同的樣本數據。
(2) 對單個樣本進行FFT,獲得其頻譜數據。將所得的頻譜數據轉換為二維矩陣,作為ViT模型的輸入。僅利用正常狀態的樣本完成ViT-DSVDD模型的訓練,并制定閾值。例如,對于采樣頻率為25 600 Hz的數據,所得頻譜數據點數為12 800,僅利用前12 544(112×112×1)個點作為模型的輸入,并將其擴充為224×224×3大小的樣本。
(3) 保存訓練完成的模型參數。
(4) 在測試過程中,將不同狀態下的測試樣本經過預處理后輸入訓練完成的模型,通過所制定的閾值判斷當前輸入是否異常。
1.3 ViT模型
Doso ViTskiy等[12]將Transformer模型引入了計算機視覺領域,提出了ViT模型。ViT將輸入圖像劃分為單個的塊(Patch),并將每個塊線性變換為一維向量標記,同時引入了單個圖像塊的類標記,二者融合后作為Transformer的輸入。相比傳統的基于卷積核的深度學習模型,ViT中的自注意力模塊能夠獲得整幅圖中相距更遠的像素之間的關聯信息。ViT模型的具體結構如圖2所示。

圖2 ViT-DSVDD方法Fig.2 ViT-DSVDD method
在計算過程中ViT首先將輸入x∈w×h×c劃分為p×p×c大小的N個圖像塊,記為:xp∈N×p×p,其中h、w、c、p分別為輸入圖像的寬、高、通道數以及劃分后圖像塊的邊長。本文中劃分為16×16大小的像素塊。然后,將所得的N個圖像塊xp映射為嵌入向量并結合每個圖像塊的分類標記cls,記為z0,作為Transformer編碼器模型的輸入。Transformer編碼器中由多頭注意力模塊、前饋神經網絡模塊以及殘差連接等部分組成。
多頭注意力模塊是由自注意力機制擴展而來。自注意力機制中,可以通過輸入z0計算鍵(Key)K、值(Value)V和查詢(Query)Q三個矩陣。然后,采用點積計算Q和K的相關程度,并縮放得到權重系數,同時對V進行加權,得到自注意力輸出向量。自注意力權重的計算過程如式(2)所示
(2)
式中:d為輸入序列z中向量的長度。
多頭注意力機制由多個自注意力機制的輸出結果拼接后得到最終輸出向量。多頭注意力模塊的計算過程如式(3)所示
H=[h1,h2,…,hh]
O=HWh
(3)

前饋神經網絡模塊有兩層全連接層(FC)結合Gelu激活函數構成。具體運算過程如式(4)所示
FFN(x)=FC(Gelu(FC(x)))
(4)
針對神經網絡中普遍存在的梯度消失問題,Transformer網絡中添加了殘差塊結構,如式(5)所示,使得網絡在學習深層特征的同時不會發生網絡退化。
g(x)=f(x)+x
(5)
式中:x為輸入;g(x)為殘差塊的輸出;f(x)為殘差映射函數。
綜上所述,ViT模型在經過第L個編碼器后的輸出計算結果為
(6)

本文中模型的具體參數為:ViT的網絡層數為12,Patch的大小為16,注意力頭數為12。O1的大小768×64;O2的大小為64×128,O3的大小為128×64。
1.4 損失函數及評價指標
ViT-DSVDD模型僅依靠正常類樣本完成網絡的訓練。其目的是建立一個能夠準確區分正常和異常類樣本的邊界。因此,對于ViT-DSVDD模型,其目標損失函數主要由兩部分組成。一是由自編碼器結構的輸出O2所構建的超球體,該超球體能夠準確描述正常類的邊界。二是具有相同維度n1的兩個輸出O1和O3,二者應具有較高的相似度。因此,ViT-DSVDD模型的損失函數如式(7)所示
(7)
目標函數式(7)中,a和DSVDD目標函數的含義相同,表示超球的球心。目標函數中的第一項是為了獲得一個體積較小的超球體;第二項采用歐氏距離計算O1和O3的相似程度。
完成模型的訓練后,根據式(8)計算所有樣本的異常得分(anomaly score),本文采用AUC指標對模型的檢測精度進行評價。
(8)
2 帶機匣的航空發動機轉子試驗器滾動軸承低轉速試驗
為驗證本文方法在低轉速滾動軸承故障檢測中的有效性。在南京航空航天大學智能診斷與專家系統研究室(Intelligent Diagnosis and Expert System, IDES)的帶機匣的航空發動機轉子試驗器上進行了試驗驗證。
2.1 帶機匣的航空發動機轉子試驗器滾動軸承試驗
帶機匣的航空發動機轉子試驗器低轉速滾動軸承故障試驗于2022年7~12月完成。試驗平臺如圖3所示,該試驗平臺是以1∶3比例仿制的某型真實發動機。試驗平臺能有效地反映航空發動機振動信號在傳遞過程中的衰減特性,試驗中的軸承型號為6206單列深溝球軸承。利用電火花切割方式加工了外圈和內圈分別為2 mm寬的裂痕,用于模擬滾動軸承故障。軸承具體參數如表1所示。

圖3 航空發動機試驗器Fig.3 Acro-engine rotor tester

表1 滾動軸承參數信息Tab.1 Rolling bearing parameter information
試驗中采用(B&K4805)振動加速度傳感器、NI USB9234數據采集器,采樣頻率為25 600 Hz,試驗過程中數據進行連續采集并存儲。在試驗中同時進行了搖轉和120 r/min恒定低轉速試驗。在進行恒定轉速試驗時由步進電機帶動試驗器進行定轉速試驗。在搖轉時操作者位于試驗器末端,用手撥動轉子葉片進行試驗,由于是人工進行轉動操作,試驗過程中轉速存在隨機轉動的現象。此外,為保證旋轉方向相同,在所有試驗過程中操作者需面向試驗器末端,進行順時針旋轉。每次試驗過程中,均在軸承內均勻涂抹了相同牌號的潤滑油脂,保證軸承能夠得到充分的潤滑。
2.2 低轉速狀態下航空發動機滾動軸承故障特征頻率難檢測性分析
為說明低轉速狀態下航空發動機機匣測點信號故障特征的微弱性,以及難以利用信號分析方法提取該微弱特征。選用恒定低轉速下試驗器軸承座和機匣測點的振動信號以及某型真實的渦扇發動機中介機匣垂直振動測點信號進行對比分析。因轉速低,在分析過程中選用了5 s的信號進行分析。采用的信號分析方法為FFT、包絡譜分析以及二進離散小波分解三種方法。其中,小波函數為 db8,分解層數為5層,對重構后所得各頻段內的信號進行包絡譜分析。限于篇幅原因,圖中僅對故障特征頻率周圍有較明顯譜線的小波包絡譜進行了可視化展示。
由圖4結果可以看出,對于內圈故障,其故障特征頻率為10.86 Hz,無論是在軸承座測點處還是在機匣測點位置,在頻譜、包絡譜和小波分解所得不同頻段的包絡譜中均不能找到明顯的譜線與之對應。同理,對于外圈故障,其所對應的故障特征頻率為7.14 Hz,機匣測點位置處,無論是在頻譜、包絡譜和小波分解所得不同頻段的包絡譜中同樣無法發現明顯的故障特征頻率。在軸承座測點分解所得的第四層小波包絡譜中有明顯的與外圈故障特征頻率相對應的頻率。然而,根據文獻[13]的結論,此頻率為滾動軸承固有的VC頻率,在該轉速下恰好與外圈故障特征頻率相一致,因此也無法直接判斷該頻率是否為故障特征頻率。通過以上分析可知,在低轉速下,若直接采用傳統的信號分析方法,很難通過尋找特征頻率的方法實現軸承的故障檢測。為了進一步驗證上述結論,采用同樣的方法對正常狀態下軸承座測點的信號進行了分析,如圖5所示。結果顯示,在正常狀態下依然存在VC頻率,和故障特征頻率相重合。因此,無法直觀地判斷是VC頻率還是故障特征頻率。

(a) 內圈故障軸承座測點信號小波第四層包絡譜

(b) 內圈故障機匣測點信號小波第四層包絡譜

(c) 外圈故障軸承座測點信號小波第四層包絡譜

(d) 外圈故障機匣測點信號小波第四層包絡譜圖4 試驗器故障信號分析結果Fig.4 Signal analysis results of outer ring fault
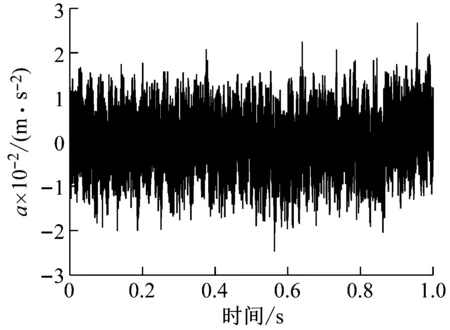
(a) 試驗器正常狀態軸承座測點信號

(b) 小波第四層包絡譜圖5 試驗器正常狀態軸承座測點信號分析結果Fig.5 Analysis result of measuring point signal of bearing seat in normal state
為進一步說明低轉速狀態下真實航空發動機機匣測點信號故障特征頻率的難檢測性。同樣采用上述方法,對真實的航空發動機三支點滾動軸承外圈剝落故障樣本進行分析。數據采樣頻率為32 000 Hz,數據時長為8 s,轉速為120 r/min。結果如圖6所示。結果顯示,對于正常狀態下和故障狀態下在小波四層分解信號的包絡譜中均出現了明顯的18.5 Hz的頻率,該頻率與理論計算所得的外圈故障特征頻率17.98 Hz非常接近。該特征頻率實則為滾動軸承固有的VC頻率,并非真正意義下的故障特征頻率。因此,在實際的航空發動機中同樣不能單純地依靠故障特征頻率判斷滾動軸承的故障狀態。

(a) 真實航空發動機正常狀態信號

(b) 正常狀態下小波第四層包絡譜

(c) 真實航空發動機外圈故障狀態信號

(d) 故障狀態下小波第四層包絡譜圖6 真實航空發動機機匣測點信號分析結果Fig.6 Signal analysis results of real aircraft engine casing measurement points
3 基于ViT-DSVDD的低轉速滾動軸承故障檢測
由于很難依據信號分析方法實現低轉速航空發動機滾動軸承故障的檢測。因此,采用所提出的ViT-DSVDD方法,實現了基于機匣測點的滾動軸承故障檢測。
本文試驗中采用GPU為NVIDIA GTX1660 6G;i5-9600K 處理器;運行系統為Windows10;8G內存;編程語言為python3.7;所有深度學習模型的框架為Pytorch1.11;批處理樣本量為64;迭代輪數為200;采用Adam優化算法,學習率為0.001。進行故障檢測時的樣本信息如表2所示。

表2 低轉速樣本信息Tab.2 Low speed sample information
3.1 不同數據預處理方法對檢測結果的影響
為說明不同數據預處理方法對模型檢測精度的影響,分別對比3種數據預處理方法下模型的檢測精度。三種方法分別為:
方法1:不經過任何處理
設振動加速度的采樣頻率為Fs。將所采集的數據轉換為采樣時長為1 s的數據樣本。將所得的序列數據樣本直接轉換為二維矩陣數據。數據處理流程如圖7(a)所示。

(a) 方法1數據預處理結果

(b) FFT法數據預處理結果

(c) 小波尺度譜圖圖7 數據預處理方法簡圖Fig.7 Sketch of data preprocessing methods
方法2:FFT法
首先,對所采集的1 s內的Fs個數據點進行FFT處理及取絕對值操作。然后,取前Fs/2個點的序列數據進行二維轉換。最后,將所得的二維矩陣數據作為模型輸入。數據處理流程如圖7(b)所示。
方法3:小波尺度譜
小波尺度譜是在時間軸上給出每個時刻的頻率描述,因此構造的是一張橫軸為時間,縱軸為頻率的二維時頻圖。所得的小波尺度譜如圖7(c)所示。
分別以上述三種預處理后的數據作為ViT-DSVDD模型的輸入,在完成模型訓練后,測試結果如表3所示。

表3 不同預處理方法的檢測結果Tab.3 Detection results of different preprocessing methods
結果顯示,對于恒定的120 r/min,在3種預處理方法的前提下,檢測精度均能達到92.00%以上。其中,預處理方法2的檢測精度最高,達到了100.00%。其次是預處理方法1,精度為96.63%。最后是預處理方法3,精度為92.37%。在搖轉狀態下依然是預處理方法2所得的檢測精度最高,達到了99.37%。相比其余兩種預處理方法具有更加明顯的檢測優勢。對比結果說明,采用數據預處理方法2,能夠獲得更好的檢測效果。
進一步,為了更加直觀的說明各預處理方法下,ViT-DSVDD模型的檢測效果,如圖8所示。對120 r/min時模型的異常得分S進行了直觀的展示。圖8的結果表明,相比于預處理方法1和3,預處理方法2所得的結果更加平滑,能夠很直觀地看出正常樣本和故障樣本的區別。三種預處理方法所得的結果出現了明顯的差異,分析認為主要是由于輸入數據點的數量不同導致的。例如,對于方法1是直接將原始數據轉換為160×160×1大小的矩陣直接作為模型的輸入;對于方法2是進行FFT后轉換為112×112×1大小的矩陣作為模型的輸入,此時模型的輸入數據量約是方法1的1/2;對于方法3是將所得的小波尺度譜圖直接保存為128×128×3的png格式的圖像后作為模型輸入,方法3中較大的頻率值在圖中會有明顯的顯示,而其余頻率值在圖中不能直觀地進行區別(圖中表現為同一種顏色),這也是方法3檢測效果較差的原因所在。

圖8 不同預處理方法的檢測結果Fig.8 Detection results of different preprocessing methods
綜上所述,本文中采用預處理方法2作為振動加速度預處理的方法。需要指出的是圖8中預處理方法2出現先增大后減小的趨勢是因為,異常狀態由兩種故障類型組成,其中較大的為外圈故障,較小的值為內圈故障。正是由于兩種故障類型的存在,才使得圖中出現了先增大后減小的趨勢。
3.2 不同異常檢測方法的對比驗證
為說明ViT-DSVDD在低轉速滾動軸承故障檢測中的有效性,分別選用和本文方法具有相似性的DSVDD、OC-NN[14]、DCAE[15]三種方法進行對比驗證,三種模型的參數和原文獻中的相同。4種模型均依靠正常類樣本完成模型的訓練,所有樣本進行測試檢驗。結果如表4所示。

表4 不同方法的對比結果Tab.4 Comparison results of different methods
結果顯示,在恒定的120 r/min時,幾種方法的檢測精度均能達到91.00%以上。然而,在搖轉狀態下ViT-DSVDD相比其余幾種方法具有巨大的優勢,其檢測精度可達到99.37%,而其余三種方法最高僅僅為64.28%。對比結果也進一步表明了本文所提方法在低轉速軸承故障診斷中的優勢。
為切實表明ViT-DSVDD的優勢,選用搖轉時表現最優的ViT-DSVDD和次優的DSVDD兩種模型的異常得分S進行可視化顯示。結果如圖9所示(圖中ViT-DSVDD的結果向上平移了2)。

圖9 搖轉檢測結果Fig.9 Rocking-turn test results
結果顯示,對于正常、外圈故障、內圈故障三種狀態,采用ViT-DSVDD模型所得結果表現平穩,通過制定閾值,能夠判斷當前輸入是否異常。但是對于DSVDD模型而言,部分異常結果落入了正常狀態的結果區間,導致其對部分數據不能直接進行分類。具體來看,對于DSVDD方法,當制定閾值為0.028 3時AUC指標達到64.28%。對于ViT-DSVDD方法則設置閾值為2.50時可完全將正常樣本和異常樣本進行區分。
3.3 模型的泛化性能驗證
為驗證本文所提方法的泛化性能。于2022年11月7日、11月15日、12月2日分別進行了第二、三、四次低轉速滾動軸承試驗,試驗硬件設備條件與2.1節中的相同,其中第二次和第三次試驗由不同的操作人員完成搖轉試驗。選用3.3節中訓練完成的ViT-DSVDD模型以及所制定的閾值進行驗證。樣本信息及結果如表5、圖10和圖11所示。

表5 第二次試驗樣本信息Tab.5 Sample information of the second test

圖10 ViT-DSVDD搖轉檢測結果Fig.10 ViT-DSVDD rocking-turn test results

圖11 ViT-DSVDD定轉速檢測結果Fig.11 ViT-DSVDD constant speed test results
結果顯示,對于不同測試時間內搖轉和定轉速的檢測精度均達到了93.52%以上。其中搖轉的檢測精度為93.52%,而定轉速的檢測精度可達97.38%。
具體而言,對于搖轉試驗,當制定閾值為2.50時,第二次相對于第一次試驗的檢測精度有所降低,為98.64%。而第三次達到100.00%的檢測精度。第四次的檢測精度為93.52%。四次對比結果說明對于不同操作人員進行的搖轉試驗檢測結果也不盡相同。然而,對于正常類樣本無論操作人員是否相同,其四次的試驗結果卻相差不多,這也為能夠通過正常類樣本訓練模型進而實現異常檢測提供了依據。
對于定轉速檢測結果,當制定閾值為2.75時,四次試驗均能夠很好的實現故障的檢測。第二次試驗的檢測精度為98.92%。第三次的檢測精度為100.00%。第四次是97.38%的檢測精度。說明依靠第一次試驗訓練完成的模型和所得的閾值是可靠的,能夠實現對低轉速滾動軸承故障的檢測。也進一步說明模型具有較強的泛化能力。
從圖10和圖11的結果中看出,同一種狀態樣本其輸出結果存在一定的差異,主要由于以下原因造成的:① 測試過程中軸承安裝誤差不同造成的結果不一致,由于試驗器在拆卸安裝過程中均使用了錘擊方法,使得前后兩次拆裝后,軸承會存在安裝誤差;② 試驗過程中前后四次試驗均為一組滾動軸承,試驗過程中難免會存在軸承磨損的問題,這也是導致前后兩次測試結果不一致的潛在原因。
4 真實的低轉速航空發動機試驗驗證
4.1 低速狀態下真實航空發動機滾動軸承異常檢測
為驗證本文所提方法在某型渦扇航空發動機低轉速滾動軸承故障檢測中的有效性及泛化性能,在多臺同型號的航空發動機(其中一臺安裝完好的主軸承,另兩臺的三支點主軸承存在外圈剝落故障,其余一臺主軸承存在內圈、外圈、滾動體的復合故障)上分別獲取了120 r/min、160 r/min兩種轉速下正常和故障兩種狀態的樣本數據,如表6所示。

表6 航空發動機低轉速試驗樣本信息Tab.6 Aero-engine low-speed test sample information
試驗中采樣頻率為16 000 Hz,傳感器安裝測點為中介機匣垂直振動測點。按照8∶2的比例將正常樣本劃分為訓練集和測試集,完成模型的訓練。在所有的樣本中進行測試。結果如圖12所示。

(a) 120 r/min的檢測結果

(b) 160 r/min的檢測結果圖12 ViT-DSVDD在真實發動機中的檢測結果Fig.12 ViT-DSVDD test results in real aero-engine
由圖12結果可知,對于真實的航空發動機,ViT-DSVDD在正常狀態和故障狀態的輸出結果完全不同。當轉速為120 r/min時,可以設置閾值為0.08,即可完全將正常和故障狀態進行區分,此時,檢測精度可達到100.00%。當轉速為160 r/min時,計算所得的閾值為0.10,檢測精度同樣達到了100.00%。以上檢測結果表明,在設置合理的閾值后,本文所提算法可以用于真實的低轉速航空發動機滾動軸承的故障檢測。圖12中輸出值S出現階梯狀的結果同樣是由于在多臺發動機上安裝了不同故障類型的軸承,使得輸出結果S值出現了先增大后減小的趨勢,同一種故障類型其輸出值S較平穩。
4.2 噪聲對檢測結果的影響
對所有的原始振動加速度數據添加均值為0,方差為0.01的高斯噪聲(考慮到實際采集數據的最大值僅為0.15),用于進一步驗證算法在真實航空發動機低轉速滾動軸承振動加速度數據上的泛化性能。依然采用數據預處理方法2對原始數據進行預處理,訓練樣本的序號和4.1節中的相同,檢測結果如圖13所示。
結果顯示,添加噪聲后,在真實發動機數據上輸出值S和不添加噪聲時輸出結果有很大的差異。但是,在設置合理的閾值后,依然能夠將正常和異常兩種狀態進行精確地區分。對于120 r/min而言,依然可以制定0.08為閾值,此時檢測精度為100%。對于160 r/min的檢測結果,如果依然設置閾值為0.1,則此時不能完全將正常和異常樣本進行區分,而閾值設置為0.14后,可實現100%的檢測。可見添加噪聲后,雖然同一狀態的樣本的數據和添加前有很大的差別,但是,不同狀態之間的輸出值依然有很明顯的區分度,也進一步驗證了本文方法具有很好的泛化性能。
5 結 論
本文提出了一種基于ViT的深度支持向量描述方法,并將其用于低速搖轉和恒定低轉速下的滾動軸承故障檢測,取得了很好的檢測效果。分析結果表明。
(1) 采用傳統的信號分析方法很難或無法直接獲得低轉速狀態下基于機匣測點信號的航空發動機滾動軸承的故障特征頻率。
(2) 不同的數據預處理方法所獲得的檢測效果也不盡相同。
(3) 采用本文所提的ViT-DSVDD方法,無論是搖轉還是恒定轉速,可僅僅依靠正常狀態的樣本完成模型的訓練,通過設置合理的閾值,然后實現對輸入數據的異常檢測。在真實的低轉速航空發動機滾動軸承故障診斷中的驗證結果也同樣說明本文所提方法的有效性。
(4) 本文的研究工作對于低轉速下航空發動機滾動軸承故障檢測具有實際應用價值。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
電子制作(2018年11期)2018-08-04 03:25:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
汽車與新動力(2015年1期)2015-02-27 12:11:01