智能裝酸鶴管自動(dòng)定位檢測(cè)系統(tǒng)的設(shè)計(jì)與應(yīng)用
2024-05-25 12:12:28胡國(guó)軍林成東
有色冶金設(shè)計(jì)與研究 2024年2期
關(guān)鍵詞:機(jī)器視覺(jué)
胡國(guó)軍 林成東
〔摘 要〕基于某硫酸廠(chǎng)智能裝酸系統(tǒng)的應(yīng)用案例,介紹了一種基于自動(dòng)定位技術(shù)的冶煉廠(chǎng)智能裝酸系統(tǒng)。通過(guò)工業(yè)相機(jī)對(duì)罐口進(jìn)行圖像采集,然后利用機(jī)器視覺(jué)算法對(duì)采集的圖像進(jìn)行處理和分析,識(shí)別罐口位置信息后自動(dòng)控制鶴管就位,實(shí)現(xiàn)了裝酸過(guò)程的自動(dòng)化,裝酸效率大幅提高,降低了操作人員勞動(dòng)強(qiáng)度,確保了裝酸過(guò)程的安全性和可靠性。
〔關(guān)鍵詞〕自動(dòng)定位;機(jī)器視覺(jué);智能裝酸系統(tǒng)
中圖分類(lèi)號(hào):TP391.41? ? ? 文獻(xiàn)標(biāo)志碼:B? 文章編號(hào):1004-4345(2024)02-0025-05
Design and Application of Automatic Positioning and Detection System for an Intelligent
Acid Loading Arm
HU Guojun, LIN Chengdong
(China Nerin Engineering Co., Ltd., Nanchang, Jiangxi 330038, China)
Abstract? Taking the application of an intelligent acid loading system in a sulfuric acid plant as an example, this paper introduces an automatic positioning technology-based intelligent acid loading system. The image of tank mouth is captured by an industrial camera, and then the captured image is processed and analyzed by machine vision algorithms, which automatically controls the arm in place after identifying the tank mouth position information. This system is applied to realize the automation during the acid loading period, greatly improve the acid loading efficiency, reduce the labour intensity of the operation personnel and ensure the safety and reliability during the acid loading period.
Keywords? automatic positioning; machine vision; intelligent acid loading system
1? ?智能裝酸系統(tǒng)及其技術(shù)難點(diǎn)
近年來(lái),隨著人工智能快速的發(fā)展,機(jī)器視覺(jué)在工業(yè)自動(dòng)化中得到了廣泛的應(yīng)用。機(jī)器視覺(jué)技術(shù)是通過(guò)對(duì)視覺(jué)圖像實(shí)時(shí)分析,根據(jù)應(yīng)用需求對(duì)現(xiàn)場(chǎng)工件對(duì)象進(jìn)行尺寸測(cè)量、角度測(cè)量、面積檢測(cè)、位置檢測(cè)、數(shù)量檢測(cè)、圖形匹配等多種操作,其以自動(dòng)化控制的方式代替了人工操作,避免因?yàn)槿斯げ僮鞯氖д`帶來(lái)?yè)p失[1]。
罐車(chē)作為硫酸運(yùn)輸行業(yè)的重要載體,承擔(dān)著硫酸物流運(yùn)輸?shù)闹匾蝿?wù)。罐裝環(huán)節(jié)直接關(guān)系到硫酸運(yùn)輸?shù)陌踩托省D壳埃覈?guó)大多數(shù)硫酸運(yùn)輸依然采用傳統(tǒng)的手動(dòng)罐裝方式。當(dāng)罐車(chē)駛?cè)胫付ㄑb酸區(qū)域后,工作人員憑肉眼觀察,手動(dòng)操作鶴管,將其對(duì)準(zhǔn)罐裝口,依照既定流程操作閥門(mén)完成裝酸作業(yè)。裝酸完成后,罐車(chē)需用地磅稱(chēng)重,以確認(rèn)裝酸量,完成整個(gè)裝酸流程。然而,現(xiàn)有的手動(dòng)裝酸過(guò)程存在諸多問(wèn)題,如人工罐口定位精度較低、勞動(dòng)強(qiáng)度大,易導(dǎo)致工作人員疲勞操作及安全事故的發(fā)生,同時(shí)工作效率亦不盡如人意。
為了解決人工操作存在的問(wèn)題,實(shí)現(xiàn)裝酸過(guò)程的智能化、自動(dòng)化,技術(shù)人員在整合了車(chē)輛指揮系統(tǒng)、視頻安全監(jiān)控系統(tǒng)、防溢酸保護(hù)系統(tǒng)等先進(jìn)技術(shù)的基礎(chǔ)上,與線(xiàn)上裝酸預(yù)約系統(tǒng)相銜接,開(kāi)發(fā)出了一個(gè)智能化、自助式的裝酸系統(tǒng)。該系統(tǒng)的研發(fā)難點(diǎn)在于鶴管自動(dòng)定位檢測(cè)系統(tǒng)的開(kāi)發(fā),它需要解決罐裝口的位置識(shí)別問(wèn)題及鶴管自動(dòng)定位的技術(shù)問(wèn)題。為了解決這些技術(shù)難題,本文擬采用先進(jìn)的機(jī)器視覺(jué)技術(shù)和圖像處理技術(shù),研發(fā)智能裝酸系統(tǒng)的鶴管自動(dòng)定位檢測(cè)系統(tǒng)。這一系統(tǒng)的研發(fā)及應(yīng)用,有望提高罐裝作業(yè)的精確度,降低工作人員的勞動(dòng)強(qiáng)度,減少疲勞操作及安全事故的發(fā)生,進(jìn)而提升我國(guó)硫酸運(yùn)輸行業(yè)的整體工作效率和安全性。
2? ?機(jī)器視覺(jué)技術(shù)應(yīng)用基礎(chǔ)綜述
機(jī)器視覺(jué)主要是通過(guò)圖像采集裝置將被拍照目標(biāo)轉(zhuǎn)換成圖像信號(hào),傳送給專(zhuān)用的圖像處理系統(tǒng),從而得到被攝目標(biāo)的形態(tài)信息,再將形態(tài)信息中的灰度、像素分布、顏色等信息轉(zhuǎn)變成數(shù)字信號(hào)。利用機(jī)器視覺(jué)技術(shù)對(duì)物件進(jìn)行識(shí)別、尺寸測(cè)量與位置定位已經(jīng)成為工業(yè)領(lǐng)域的研究熱點(diǎn)。
2019年,郭智杰等利用機(jī)器視覺(jué)和紅外光柵技術(shù)實(shí)現(xiàn)輪轂外形參數(shù)測(cè)量[3],其首先采用形態(tài)學(xué)和Hough變換方法對(duì)輪轂進(jìn)行擬合,然后實(shí)現(xiàn)輪轂的直徑尺寸測(cè)量。該方法在標(biāo)準(zhǔn)輪轂尺寸進(jìn)行測(cè)量上具有可靠的有效性,但是在擴(kuò)展應(yīng)用上存在一定的局限性。2021年,謝俊等利用機(jī)器視覺(jué)技術(shù)解決了孔類(lèi)零件尺寸測(cè)量問(wèn)題。其首先通過(guò)圖像灰度化和閾值分割法對(duì)圖像進(jìn)行分割,然后再使用Canny算法對(duì)需要測(cè)量的零件邊緣進(jìn)行定位,最終實(shí)現(xiàn)了零件尺寸測(cè)量。該方法不僅能有效地解決孔類(lèi)工件測(cè)量問(wèn)題,還具有較高的測(cè)量精度[4]。同年,鄭如新等利用HALCON機(jī)器視覺(jué)軟件對(duì)工件進(jìn)行高度測(cè)量,采用雙目相機(jī)對(duì)工件進(jìn)行圖像采集,分析了雙目立體視覺(jué)的工作原理并對(duì)相機(jī)進(jìn)行了標(biāo)定,提出了一種通過(guò)提取鞍點(diǎn)法來(lái)對(duì)工件進(jìn)行定位,同時(shí)利用求平面向量來(lái)確定工件高度尺寸的方法,該方法具有較高的應(yīng)用價(jià)值[5]。孔類(lèi)工件測(cè)量和雙目相機(jī)的成功研究,為本項(xiàng)目的成功提供了理論依據(jù)。
從相關(guān)應(yīng)用實(shí)踐可以看出,作為一項(xiàng)綜合技術(shù),機(jī)器視覺(jué)技術(shù)在工業(yè)上的應(yīng)用涉及數(shù)字圖像處理技術(shù)、機(jī)械工程技術(shù)、控制技術(shù)、光源照明技術(shù)、光學(xué)成像技術(shù)、傳感器技術(shù)、模擬與數(shù)字視頻技術(shù)、計(jì)算機(jī)軟硬件技術(shù)和人機(jī)接口技術(shù)等多種先進(jìn)技術(shù)的融合,強(qiáng)調(diào)實(shí)用性,能夠適應(yīng)工業(yè)現(xiàn)場(chǎng)的惡劣環(huán)境,且具有合理的性?xún)r(jià)比、通用的工業(yè)接口、較高的容錯(cuò)能力,以及較強(qiáng)的安全性、通用性和可移植性。
在機(jī)器視覺(jué)領(lǐng)域,已有OpenCV、Halcon、Vision Pro等多種基礎(chǔ)開(kāi)發(fā)平臺(tái),其中Halcon是德國(guó)Mvtec公司推出的1套完善的機(jī)器視覺(jué)算法包,是工業(yè)界具有高效開(kāi)發(fā)應(yīng)用的Machine Vision軟件平臺(tái)[2]。本項(xiàng)目擬采用Halcon視覺(jué)平臺(tái)結(jié)合C#進(jìn)行二次開(kāi)發(fā),實(shí)現(xiàn)裝酸鶴管自動(dòng)定位系統(tǒng)應(yīng)用。
3? ?系統(tǒng)設(shè)計(jì)思路
本次裝酸鶴管自動(dòng)定位系統(tǒng)研發(fā)的目的是在目前依靠人工操作的鶴管基礎(chǔ)上,建立1套自動(dòng)化鶴管裝車(chē)系統(tǒng),從識(shí)別罐口到自動(dòng)控制鶴管插入罐口,裝酸完成后復(fù)位的整個(gè)過(guò)程均通過(guò)機(jī)器自動(dòng)實(shí)現(xiàn)。
本文設(shè)計(jì)的鶴管自動(dòng)定位系統(tǒng)包括光源、工業(yè)相機(jī)、激光傳感器、圖像處理單元、圖像處理軟件、監(jiān)視器和通信設(shè)備。該系統(tǒng)首先通過(guò)工業(yè)相機(jī)獲得被測(cè)目標(biāo)的圖像信號(hào),然后通過(guò)A/D 轉(zhuǎn)換變成數(shù)字信號(hào)傳送給專(zhuān)用的圖像處理系統(tǒng)。圖像處理系統(tǒng)根據(jù)像素分布、亮度和顏色等信息進(jìn)行各種運(yùn)算,以抽取目標(biāo)特征,最后再根據(jù)預(yù)設(shè)的判別準(zhǔn)則輸出判斷結(jié)果,控制驅(qū)動(dòng)執(zhí)行機(jī)構(gòu)進(jìn)行相應(yīng)的處理。
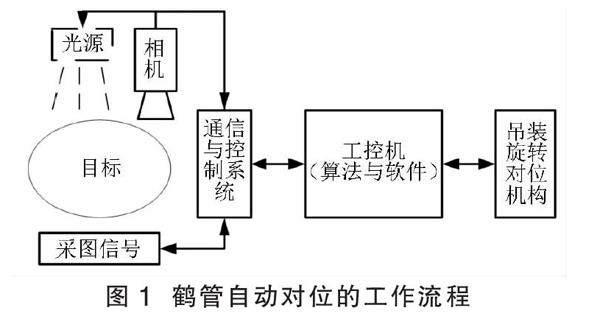
針對(duì)應(yīng)用需求和目標(biāo),采用圖像測(cè)量的方法對(duì)酸罐口進(jìn)行識(shí)別和定位,并根據(jù)軟件計(jì)算得到罐口坐標(biāo)信息,引導(dǎo)鶴管管制系統(tǒng)進(jìn)行自動(dòng)精確對(duì)位。自動(dòng)對(duì)位系統(tǒng)包括三維運(yùn)動(dòng)機(jī)構(gòu)、圖像采集單元、通信與控制系統(tǒng)、結(jié)構(gòu)與支撐系統(tǒng)、工控機(jī)及算法軟件系統(tǒng)。自動(dòng)對(duì)位的工作流程見(jiàn)圖1。
如圖1所示,系統(tǒng)通過(guò)攝像頭獲取視頻流,記錄攝像頭在t時(shí)刻和t+1時(shí)刻的圖像,將其命名為It 和 It+1,并將視頻流轉(zhuǎn)換為灰度圖像。根據(jù)It和It+1圖像,通過(guò)相機(jī)標(biāo)定算法獲得相機(jī)的內(nèi)參。使用工控機(jī)中內(nèi)置的自動(dòng)定位檢測(cè)算法獲取圖像中裝酸罐口的位置,從而獲得每一幀中裝酸罐口與相機(jī)的相對(duì)位置。工控機(jī)控制吊裝旋轉(zhuǎn)對(duì)位機(jī)構(gòu)調(diào)整鶴管與罐口的位置,重復(fù)第2步與第3步,直到罐口與鶴管對(duì)齊,最后完成灌裝工作。
4? ?鶴管自動(dòng)定位檢測(cè)系統(tǒng)的實(shí)現(xiàn)
4.1? 系統(tǒng)原理
鶴管自動(dòng)定位檢測(cè)系統(tǒng)需要確立1個(gè)坐標(biāo)原點(diǎn),并在這個(gè)坐標(biāo)原點(diǎn)基礎(chǔ)上建立1個(gè)三維坐標(biāo)系。其中,垂直于罐車(chē)的方向定義為X軸,平行于罐車(chē)的方向定義為Y軸,而對(duì)位系統(tǒng)的升降方向則定義為Z軸。
工業(yè)相機(jī)經(jīng)過(guò)精確標(biāo)定后保持在相對(duì)固定的位置。系統(tǒng)采用適宜的光源對(duì)被測(cè)物進(jìn)行照明,以便高分辨率工業(yè)相機(jī)獲取被測(cè)區(qū)域的圖像信息。通過(guò)算法分析處理,可得到工業(yè)相機(jī)視野內(nèi)目標(biāo)物的三維坐標(biāo)。
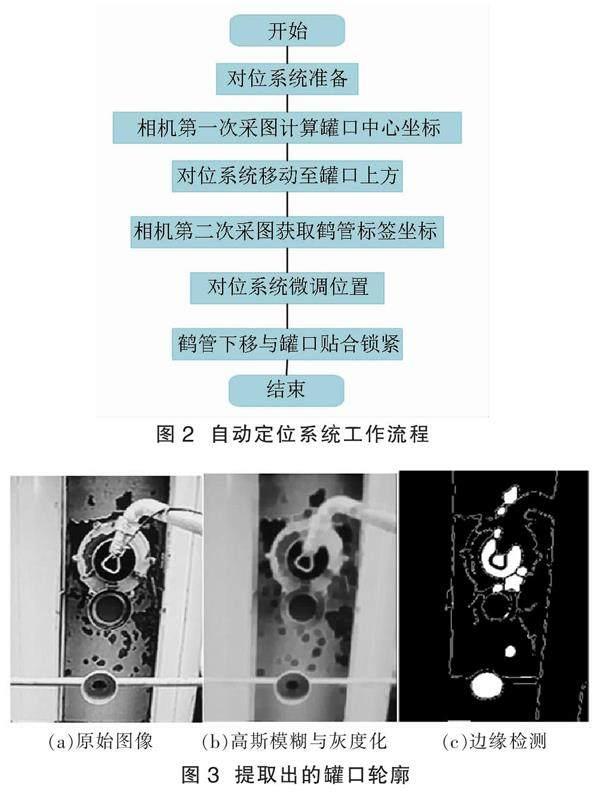
自動(dòng)定位系統(tǒng)工作流程見(jiàn)圖2,具體如下:在檢測(cè)開(kāi)始時(shí),鶴管處于預(yù)設(shè)的初始位置。這一位置需要經(jīng)過(guò)現(xiàn)場(chǎng)詳細(xì)調(diào)研后精確標(biāo)定。在此狀態(tài)下,罐口位于相機(jī)的視野范圍內(nèi)。當(dāng)鶴管處于靜止?fàn)顟B(tài)時(shí),相機(jī)進(jìn)行第一次圖像采集,并對(duì)圖像進(jìn)行處理,從中提取出罐口的輪廓,如圖3所示。隨后,軟件計(jì)算出罐口中心相對(duì)原點(diǎn)的平面坐標(biāo),以此來(lái)引導(dǎo)對(duì)位系統(tǒng)向酸罐口上方移動(dòng)。在第一次移動(dòng)停止后,相機(jī)進(jìn)行第二次圖像采集,并計(jì)算鶴管標(biāo)簽相對(duì)原點(diǎn)的坐標(biāo)。通過(guò)持續(xù)計(jì)算鶴管標(biāo)簽坐標(biāo)與前一次圖像處理得到的罐口中心坐標(biāo)之間的相對(duì)距離,系統(tǒng)不斷調(diào)整鶴管的位置,以確保鶴管與罐口能夠精確對(duì)齊。
4.2? 圖像預(yù)處理與罐口邊緣檢測(cè)
鶴管自動(dòng)定位檢測(cè)系統(tǒng)通過(guò)相機(jī)獲取圖像后,為了獲得圖像中罐口所在的位置,需要對(duì)圖像進(jìn)行邊緣檢測(cè)。為準(zhǔn)確提取罐口邊緣信息,圖像處理階段必須對(duì)圖像進(jìn)行預(yù)處理操作,隨后再進(jìn)行邊緣檢測(cè)。
4.2.1 圖像預(yù)處理
圖像預(yù)處理是指在識(shí)別圖像之前,對(duì)圖像進(jìn)行預(yù)先的處理,以達(dá)到消除無(wú)關(guān)信息、恢復(fù)有用信息、增強(qiáng)有關(guān)信息可檢測(cè)性等目的。本系統(tǒng)主要采用高斯濾波結(jié)合灰度化進(jìn)行預(yù)處理。
高斯濾波是一種線(xiàn)性濾波器,能夠有效地抑制噪聲,平滑圖像,其作用原理和均值濾波器類(lèi)似,都是取濾波器窗口內(nèi)的像素均值作為輸出。其窗口模板的系數(shù)和均值濾波器不同,均值濾波器的模板系數(shù)都為1,而高斯濾波器的模板系數(shù)則隨著距離模板中心的增大而減小。
圖像灰度化是指每個(gè)像素只有一個(gè)采樣顏色的圖像,這類(lèi)圖像通常顯示為從最暗黑色到最亮白色的灰度。灰度圖像與黑白圖像不同,在計(jì)算機(jī)圖像領(lǐng)域中黑白圖像只有黑白兩種顏色,一般稱(chēng)為二值圖(0 or 255),灰度圖在黑色與白色中間還有很多級(jí)的顏色深度(0~255)。在RGB模型中,如果R=G=B時(shí),則彩色表示一種灰度顏色,其中R=G=B的值叫灰度值。將RGB圖像轉(zhuǎn)化為灰度圖像時(shí),應(yīng)根據(jù)人眼的色敏度,用0.3×R+0.59×G+0.11×B的加權(quán)平均法計(jì)算灰度值。
4.2.2? 罐口邊緣檢測(cè)
邊緣檢測(cè)是基于灰度突變來(lái)分割圖像的常用方法,其實(shí)質(zhì)是提取圖像中不連續(xù)部分的特征。本文使用Canny邊緣檢測(cè)算子對(duì)鶴管進(jìn)行邊緣檢測(cè)。
Canny算子是由計(jì)算機(jī)科學(xué)家John F. Canny于1986年提出的一種邊緣檢測(cè)算子,是目前理論上相對(duì)最完善的一種邊緣檢測(cè)算法。該算法的目標(biāo)是找到一個(gè)最優(yōu)的邊緣檢測(cè)解或找尋一幅圖像中灰度強(qiáng)度變化最強(qiáng)的位置。最優(yōu)邊緣檢測(cè)主要通過(guò)低錯(cuò)誤率、高定位性和最小響應(yīng)3個(gè)標(biāo)準(zhǔn)進(jìn)行評(píng)價(jià)。Canny算子的簡(jiǎn)要步驟如下:1)圖像去噪。由于圖像在采集過(guò)程中可能會(huì)受到噪聲的影響,因此在進(jìn)行邊緣檢測(cè)之前,需要對(duì)圖像進(jìn)行去噪處理。本文采用高斯濾波器對(duì)圖像進(jìn)行去噪處理,以降低噪聲對(duì)邊緣檢測(cè)的影響。2)圖像增強(qiáng)。通過(guò)增強(qiáng)圖像的局部對(duì)比度,可以使得邊緣特征更加明顯。本文采用sobel算子對(duì)圖像進(jìn)行梯度運(yùn)算,以增強(qiáng)圖像的邊緣特征。3)梯度計(jì)算。計(jì)算圖像中每個(gè)像素點(diǎn)的梯度幅度和方向,以確定可能的邊緣點(diǎn)。4)非極大值抑制。對(duì)梯度幅度進(jìn)行非極大值抑制,以消除那些不是邊緣的點(diǎn),保留潛在的邊緣點(diǎn)。5)雙閾值處理。設(shè)置兩個(gè)閾值(高低閾值),對(duì)潛在的邊緣點(diǎn)進(jìn)行篩選,以確定最終的邊緣點(diǎn)。其中,高閾值用于識(shí)別強(qiáng)邊緣,低閾值用于識(shí)別弱邊緣。強(qiáng)邊緣與弱邊緣相連時(shí),可以將弱邊緣連接到強(qiáng)邊緣上。
由圖3可以看出,通過(guò)對(duì)鶴管圖像進(jìn)行Canny邊緣檢測(cè),可以得到較為準(zhǔn)確的邊緣信息。從實(shí)踐結(jié)果看,本文所采用的方法能夠在很大程度上消除噪聲對(duì)邊緣檢測(cè)的影響,同時(shí)能夠有效地提取出圖像中的邊緣特征。
4.3? 定位算法
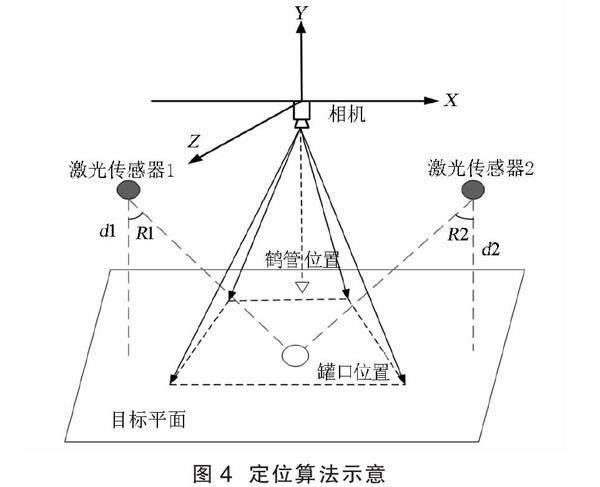
在鶴管自動(dòng)定位檢測(cè)系統(tǒng)的應(yīng)用中,罐口的實(shí)際位置通過(guò)三角定位法來(lái)獲取。定位所使用的定位設(shè)備主要為1臺(tái)工業(yè)相機(jī)和2個(gè)激光傳感器。算法示意見(jiàn)圖4。
如圖4所示,當(dāng)車(chē)輛停泊在指定區(qū)域內(nèi),系統(tǒng)方允許裝車(chē)作業(yè)。在啟動(dòng)裝車(chē)時(shí),系統(tǒng)先觸發(fā)視覺(jué)抓拍,對(duì)圖像進(jìn)行預(yù)處理以及罐口邊緣檢測(cè),并對(duì)邊緣檢測(cè)后的二值化圖像進(jìn)行霍夫變換,對(duì)罐口(圓形)進(jìn)行識(shí)別。霍夫變換的基本原理在于利用點(diǎn)與線(xiàn)的對(duì)偶性,將原始圖像空間的給定曲線(xiàn)通過(guò)曲線(xiàn)表達(dá)形式變?yōu)閰?shù)空間的一個(gè)點(diǎn)。這樣就把原始圖像給定曲線(xiàn)的檢測(cè)問(wèn)題,轉(zhuǎn)化為檢測(cè)參數(shù)空間的峰值問(wèn)題,即把檢測(cè)整體特性轉(zhuǎn)化為檢測(cè)局部特性,比如直線(xiàn)、橢圓、圓、弧線(xiàn)等。如圖5所示,首先將圓形方程(x-a)2+(y-b)2=r2從以坐標(biāo)對(duì)為未知數(shù)轉(zhuǎn)換為以參數(shù)對(duì)為未知數(shù),再以統(tǒng)計(jì)的方式獲得圖像中可能是圓形的參數(shù)對(duì),從而識(shí)別出圖像中可能存在的圓形。然后,利用圓形的半徑等長(zhǎng)的性質(zhì),通過(guò)圖像中的形狀輪廓,找出每個(gè)輪廓的最小包圍圓作為預(yù)設(shè)的圓,計(jì)算預(yù)設(shè)的最小包圍圓的圓心到輪廓上點(diǎn)的距離,將滿(mǎn)足等長(zhǎng)條件的輪廓視為圖像中存在的圓形,即罐口在圖像中的位置。
由于罐口所在平面存在不確定性,無(wú)法使用簡(jiǎn)單的距離公式計(jì)算出實(shí)際的距離,因此本文使用2個(gè)激光傳感器來(lái)確定罐口所在平面,即目標(biāo)平面,從而推導(dǎo)出罐口的實(shí)際位置。捕捉到罐口后,以相機(jī)位置為原點(diǎn),建立視覺(jué)坐標(biāo)系。視覺(jué)建立坐標(biāo)系后,記錄罐口位置,并將位置信息發(fā)送給控制系統(tǒng),通過(guò)吊裝旋轉(zhuǎn)對(duì)位機(jī)構(gòu)系統(tǒng),進(jìn)行運(yùn)動(dòng)控制,由編碼器、激光測(cè)量?jī)x實(shí)時(shí)反饋鶴管當(dāng)前位置,并與系統(tǒng)坐標(biāo)系實(shí)時(shí)校驗(yàn),以確保系統(tǒng)能實(shí)時(shí)控制鶴管的行進(jìn)位置。當(dāng)鶴管行進(jìn)到槽車(chē)罐口正上方,位置檢測(cè)傳感器向系統(tǒng)反饋當(dāng)前位置與目標(biāo)位置一致,鶴管放入罐口,自動(dòng)對(duì)位完成。
4.4? 鶴管自動(dòng)定位系統(tǒng)
系統(tǒng)運(yùn)行后,首先進(jìn)入準(zhǔn)備狀態(tài)。在此狀態(tài)下,進(jìn)入工作區(qū)域,機(jī)械手移動(dòng)到拍照位置,攝像頭開(kāi)啟。接著,按下拍照按鈕,相機(jī)獲取1張工位區(qū)域圖片并在界面上顯示。機(jī)器視覺(jué)系統(tǒng)對(duì)照片進(jìn)行處理并分析,找到照片上的罐口位置,并通過(guò)界面顯示出來(lái)。第1次移動(dòng)停止后,相機(jī)第2次采圖計(jì)算鶴管標(biāo)簽相對(duì)原點(diǎn)的坐標(biāo),通過(guò)計(jì)算鶴管標(biāo)簽坐標(biāo)與第1次取圖計(jì)算出的罐口中心坐標(biāo)相對(duì)距離,引導(dǎo)鶴管在水平方向上進(jìn)行微調(diào),當(dāng)鶴管標(biāo)簽坐標(biāo)與罐口中心坐標(biāo)誤差小于5 mm時(shí),微調(diào)結(jié)束。 微調(diào)結(jié)束后采用激光定位系統(tǒng)進(jìn)行復(fù)核,復(fù)核無(wú)誤后軟件根據(jù)罐口中心Z坐標(biāo)值,引導(dǎo)鶴管下移與罐口貼合鎖緊后,自動(dòng)對(duì)位完成。系統(tǒng)的人機(jī)交互界面見(jiàn)圖6。
5? ?結(jié)語(yǔ)
本文主要是運(yùn)用機(jī)器視覺(jué)的方法自動(dòng)識(shí)別裝酸口的位置,采用伺服電機(jī)驅(qū)動(dòng)鶴管進(jìn)行自動(dòng)定位。視覺(jué)定位+激光定位系統(tǒng)的綜合運(yùn)用,既具有視覺(jué)定位快速的特點(diǎn),又具有激光終端反饋的能力,使整套定位系統(tǒng)形成一套閉環(huán)機(jī)制,大大提高了系統(tǒng)的穩(wěn)定性和安全性。視覺(jué)系統(tǒng)的使用實(shí)現(xiàn)了精準(zhǔn)對(duì)位,降低人工操作帶來(lái)的誤操作風(fēng)險(xiǎn)。并且大幅縮短對(duì)位時(shí)間,降低了人工勞動(dòng)強(qiáng)度,提高勞動(dòng)效率。特別是解決了智能裝酸系統(tǒng)中的技術(shù)難點(diǎn),實(shí)現(xiàn)了裝酸系統(tǒng)的自動(dòng)化和智能化。
參考文獻(xiàn)
[1] Golnabi H, asadpour A. Design and application of industrial machine vision systems[J]. Robotics and Computer-integrated Manufacturing, 2007,23(6):630-637.
[2] XU X B, ZHANG X M, HAN J Q, et al. HALCON application for shape-based matching[C]//IEEE: 2008 3rd IEEE Conference on Industrial Electronics and Applications.Singapore:IEEE,2008:2431-2434.
[3] 郭智杰, 王明泉, 張俊生, 等. 輪轂外形參數(shù)的在線(xiàn)測(cè)量技術(shù)研究[J]. 國(guó)外電子測(cè)量技術(shù), 2019,38(5):142-145.
[4] 謝俊, 李玉萍, 左飛飛, 等. 基于機(jī)器視覺(jué)的孔類(lèi)零件尺寸在線(xiàn)檢測(cè)[J]. 電子測(cè)量技術(shù), 2021,44(2):93-98.
[5] 鄭如新, 孫青云, 肖國(guó)棟. 基于機(jī)器視覺(jué)的工件尺寸測(cè)量研究[J]. 電子測(cè)量技術(shù), 2021,44(16):110-115.
[6] ZHANG Z Y. A flexible new technique for camera calibration[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000,22(11):1330-1334.
收稿日期:2023-02-26
基金項(xiàng)目:廣西科技計(jì)劃項(xiàng)目(科技重大專(zhuān)項(xiàng))“年產(chǎn)30萬(wàn)t陰極銅連續(xù)煉銅關(guān)鍵技術(shù)開(kāi)發(fā)及產(chǎn)業(yè)化示范”(項(xiàng)目編號(hào):2020AA17001AA)
作者簡(jiǎn)介:胡國(guó)軍(1981—),男,高級(jí)工程師,主要從事儀表自動(dòng)化設(shè)計(jì)工作。
猜你喜歡
軟件導(dǎo)刊(2016年11期)2016-12-22 21:52:17
電腦知識(shí)與技術(shù)(2016年28期)2016-12-21 12:13:14
科技視界(2016年26期)2016-12-17 17:31:58
科技視界(2016年25期)2016-11-25 19:53:52
科技視界(2016年25期)2016-11-25 09:27:34
科教導(dǎo)刊(2016年25期)2016-11-15 17:53:37
軟件工程(2016年8期)2016-10-25 15:55:22
科技視界(2016年20期)2016-09-29 11:11:40
科技視界(2016年6期)2016-07-12 09:12:40
科技視界(2016年15期)2016-06-30 19:03:30