基于無人機的垃圾撿拾裝置設計
2024-06-19 13:49:16呂奕張開利關宏強肖楓
電腦迷 2024年4期
呂奕 張開利 關宏強 肖楓
【摘 ?要】 文章針對峭壁垃圾位置難以抵達和掛在樹枝上的白色垃圾位置較高的問題,設計了一種基于無人機的垃圾撿拾裝置。該裝置通過接收遙控器發送的信號,經過飛控信息處理后,調節各個電機的轉速,改變飛行器的位置;同時,接收盒將信號轉換成PWM信號,控制舵機旋轉角度,實現機械臂和機械爪的操作。這使得裝置可以靈活飛行到環衛工人難以抵達的位置,準確抓取目標物,解決了垃圾撿拾中的一系列棘手問題,降低了環衛工人的危險性,提高了垃圾清理效率,為凈化環境添磚加瓦。
【關鍵詞】 無人機;垃圾撿拾;機械爪;機械臂
隨著人們對精神文化需求的提升,旅游已成為了解歷史文化和區域文化的主要方式,特別是一些名山秀水備受青睞。然而,隨之而來的是游客留下的大量廢棄物,如礦泉水瓶、各種包裝袋等。這些廢棄物的增加,加上風力的影響,導致一些垃圾滯留在峭壁、樹枝或其他高處,難以清理。針對這種峭壁垃圾位置難以抵達,以及白色垃圾掛在樹枝上高處的問題,文章研究并設計了一種可以飛行的垃圾撿拾裝置,有效地替代了傳統的“蜘蛛人”攀巖作業的危險性和使用升降車作業的低效性。
一、裝置工作原理
無人機系統在現代社會中的應用日益廣泛,無論是在軍事領域的偵察與打擊,還是在民用領域的航拍與物流,都離不開這項先進技術的支持。然而,隨著無人機系統的規模和復雜度不斷增加,如何保持其高度可用性成為一個迫切的問題。因此,對無人機系統的可用性進行評估與提升,是提高其整體性能與效益的關鍵。本裝置利用無人機接收遙控器發送的信號,經過飛控信息處理后,通過電調控制各個電機的轉速,從而改變飛行器的運動位置;同時,接收盒將接收到的信號轉換成PWM信號,以控制舵機轉動相應角度,完成機械臂旋轉、機械爪抓取的功能操作,使得裝置能夠靈活飛行到環衛工人不易抵達的位置,準確抓取目標物。
(一)無人機飛行及控制的實現
考慮到被清理垃圾的重量通常不會超過1kg,本研究選擇了大疆F450無人機作為載荷平臺。該無人機的毛重為0.89kg,可搭載1kg至1.2kg的負載。電調采用的是天行者系列的HOBBYWING40A,其最高轉速為:2極馬達210000轉/分鐘、6極馬達70000轉/分鐘、12極馬達35000轉/分鐘。無人機搭載了飛控系統,其中包括先進的姿態穩定算法、多種飛行控制模式/智能切換、GPS模塊擴展/精準定位懸停、智能方向控制、失控保護模式、低電壓保護、普通、PPM接收機及D-BUS支持,以及支持多種多旋翼類型、云臺增穩和遠程調參等功能。RF209S型接收機能夠接收遙控器發送的信號,經過飛控程序處理后,通過電調來控制各個電機的轉速,從而實現對飛行器動作的精確控制。
(二)無人機的操控原理
無人機采用的是當前普通直升機的氣動布局,能夠攜帶圖像采集和信息傳輸設備。在飛行過程中,無人機通過傳輸設備將所獲取的各種信息傳輸到監控中心,從而極大地提高了工作效率。常見的四旋翼無人機的氣動布局是四個旋翼相互對稱分布,這種結構具有良好的起降能力。此外,四旋翼無人機還配備了減震云臺和無線傳輸設備,能夠在進行垃圾撿拾過程中利用高分辨率的圖像采集設備進行信息的采集和傳輸,并將信息及時傳送到監控中心。本裝置選擇的大疆F450四旋翼無人機,其主要動力來源是四個螺旋槳。螺旋槳的布局決定了各個電機的動力分配方式,通常分為對稱和不對稱兩種。在本裝置中,為了方便動力的分配,采用了對稱布局。
采用對稱布局的無人機有兩種主要類型:“X”型和“十字”型。在本裝置中,由于無人機需要完成復雜的運動任務,包括滾轉、俯仰、偏航和平移等,同時需要在底盤上安裝機械手臂以進行垃圾撿拾,因此無人機的機頭方向需要垂直于四個螺旋槳確定的平面。基于此要求,本裝置采用了“X”型布局。無人機裝備有四個電機,分別標記為Ω1、Ω2、Ω3、和Ω4。通過調節每組電機的轉向和轉速,無人機可以產生所需的偏航力矩。由于螺旋槳有正反之分,使得不同旋轉方向的螺旋槳產生相同方向的推力。因此,為了實現各種姿態飛行,需要讓兩組電機反向轉動以獲得相同方向的推力。例如,如果無人機需要向右滾轉,可以增加Ω1和Ω4的轉速,降低Ω2和Ω3的轉速。這樣,機體右側的力矩小于左側的力矩,使得機體向右傾斜。同樣地,如果需要前傾即俯沖姿態運動,只需要降低Ω1和Ω2的轉速,增加Ω3和Ω4的轉速即可,反之亦然,以實現后傾即機頭仰起的姿態運動。由此可見,無論機頭需要向何方運動,只需降低相應方向的兩個電機的轉速,同時增加對側電機的轉速,即可實現所需的運動。
(三)機械臂和無人機連接的實現
針對無人機和機械臂的重量和操作需求,本研究選擇了SHANG YI品牌的鋰電池,其具有XT60端口輸出,容量為6000mAh,重量為435克。電池通過接頭連接,為機械臂提供供電。一塊充滿電的SHANG YI鋰電池可以保證無人機和機械臂連續工作約15至30分鐘。考慮到實際垃圾清理工作的量,環衛工人可以準備幾塊備用電池,以確保工作的連續性和高效性。
(四)無人機及機械臂供電的實現
無人機底盤和機械臂之間通過自制的亞克力板材與連接件連接使其固定。其中,機械臂具有兩個自由度,可以實現轉動和機械爪的開合。利用無人機的空中飛行能力,可以輕松到達高處或危險地帶,從而實現對目標物的準確抓取。連接無人機底盤和機械臂的方式是使用連接板和U型件。連接板固定在無人機底部,而機械臂的連接件則使用短U型連接件連接。連接板和U型件通過螺釘組裝在一起,以確保連接穩固可靠。
(五)機械臂轉動的實現
利用無人機的飛控裝置控制舵機的旋轉,舵機具有勻速轉動和指定角度轉動的特點。支架與支架之間通過舵機連接。舵機的控制信號是一個脈沖寬度調制信號(PWM信號)。通過接收機發出不同頻率的PWM信號,將舵機連接在接收機的通道上,以控制舵機旋轉到不同的角度。這樣就可以帶動機械臂的旋轉和機械爪的開合,從而完成目標物的抓取功能。
(六)機械爪抓取的實現
機械爪也采取舵機作為原動力,考慮無人機所能承受機械臂的重量,采用與型號重量較合適的舵機。舵機選取時需要考慮以下幾點:
(1)舵機是機械臂的組成部分,去除舵機以外的機械臂組成部分重量,計算、預估出舵機重量的合理范圍值;
(2)機械爪舵機應滿足實際需求抓取目標物的重量范圍。舵機固定在機械爪的咬合處,轉動固定的角度,連接到機械爪旋轉的部位,帶動機械爪上控制旋轉的齒輪區域進行轉動,以達到機械爪抓取的功能。
(七)機械臂支架
考慮到無人機的載重問題,整個裝置重量越輕越好。扣除已有舵機、底座的重量,剩下的載重量則是機械臂部分的重量,機械臂材料選取時需要考慮以下三點:
1. 需要考慮材質的重量,材質重量不宜過大;
2. 材質的耐用性至關重要,耐用性強的材質可以延長裝置的使用壽命;
3. 材質的承重性決定了整個裝置的穩定性和可靠性,承重性強的材質可以保證配置在機械臂上的其他部件更加穩固、保證抓取目標物更加可靠。
基于以上因素,機械臂支架全部采用2A16航空鋁材,減輕機械臂重量,降低無人機載重量,滿足本裝置在耐用性、穩固性、可靠性等方面的需求。
二、裝置設計與計算
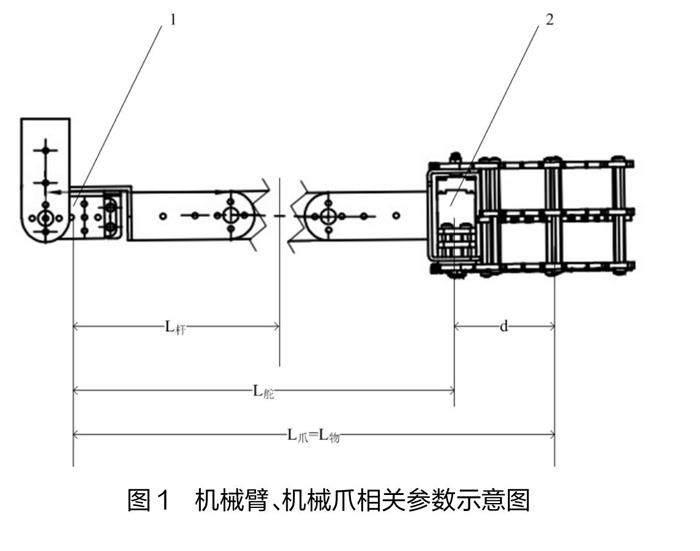
機械部分包括機械臂和機械爪兩個構件。經過設計、選材、組裝和調試,最終制作出實物。根據零部件的相關參數(如圖1所示),可以計算出該裝置可以抓取的目標物的重量范圍,從而為實際應用時撿拾目標物提供參考。
1. 計算機械爪可抓取的物體最大重量(即G物)。
公式:G桿·L桿+G舵·L舵+G爪·L爪+G物·L物=M1 ?①
已知參數的數據值如下:
G桿:機械臂的重量0.64N;
L桿:舵機Ⅰ的回轉中心到機械臂重心的長度170 mm;
G舵:舵機Ⅱ的重量0.6N;
L舵:舵機Ⅰ的回轉中心到舵機Ⅱ重心的距離300mm;
G爪:機械爪的重量1.25N;
L爪:舵機Ⅰ的回轉中心到機械爪中心的距離350 mm;
L物:抓取的物體重心到舵機Ⅱ的距離,即機械爪中心到舵機Ⅱ的距離350mm;
M1:舵機Ⅰ的扭矩150N·cm;
將各參數值代入公式①,具體如下:
∵G桿·L桿+G舵·L舵+G爪·L爪+G物·L物=M1
∴0.64N·170×10-1cm+0.6N·300×10-1cm+1.25N·350×10-1cm+G物·350×10-1cm=150N·cm
計算得出,G物=2.21N,即機械爪可抓取物體的最大重量G物的值為2.21N。
2. 計算機械爪的夾取力(即F)。
公式:F·d=M2 ?②
已知參數的數據值如下:
d:舵機Ⅱ到機械爪中心的距離50mm;
M2:舵機Ⅱ的扭矩160N·cm;
將各參數值代入公式②,具體如下:
∵F·d=M2
∴F·50×10-1cm=160N·cm
計算得出,F=32N,即機械爪的夾取力F的值為32N。
經過以上兩步計算,得出機械爪夾取力F遠大于可抓取最大物體重量G物,即F>G物。同時考慮到在抓取白色掛枝垃圾時其處于掛枝狀態,強行抓取會有較大的掛枝力,可通過遙控無人機多角度多方位抓取避免掛枝阻力;另外由于掛枝物大多為塑料類,材質具有輕、軟、柔等特性,為了盡可能避免由于機械爪材質過硬,實際工作時出現抓取脫離現象,本裝置在機械爪抓取部位粘貼了軟而輕的珍珠棉來增加抓取物與機械爪間的摩擦力。通過裝置的多個實驗環境測試,證明本裝置的設計及配置是正確、合理的。
3. 調整整個裝置的平衡性。
當機械臂與無人機機體相互垂直時,無人機四個旋翼的轉速是相等的,可以保證整個裝置的平衡性;當機械臂向右旋轉90度角(面對裝置時)與無人機機體平行時,飛控計算自適應調整左側旋翼Ω1、Ω4的轉速和右側旋翼Ω2、Ω3的轉速,轉速調整需要滿足以下兩點,可以保證整個裝置的平衡性:
①右側Ω2、Ω3的升力之和大于左側Ω1、Ω4的升力之和,即F右>F左,可以保障機械臂向右扭轉時正常抓取目標物;
②保證總力矩平衡,即M左旋=M右旋+M臂,其中,M左旋是左側旋翼Ω1、Ω4的力矩之和,M右旋是右側旋翼Ω2、Ω3的力矩之和,M臂是機械臂的力矩;
根據以上兩點裝置平衡性原理要求,本裝置順利完成平衡性調試,并成功通過測試。
三、結語
本裝置借助無人機的飛行功能及可擴展功能二次開發的特點,對機械臂、機械爪各方位抓取功能設計,實現本裝置靈活飛行于環衛工人不易抵達的位置,準確抓取目標物,降低環衛工人撿拾垃圾的危險度,提高垃圾清理效率。本裝置具體性能如下:
1. 在可見范圍內,即無任何阻擋的前提下,無人機最遠可控距離約為500m,滿足環衛工人一次垃圾清理的工作范圍,實用性強;
2. 當機械臂扭轉至與無人機機身平行時,機械臂的長度應大于無人機最大長度的一半,機械臂最長距離約為408 mm,保證無人機的旋翼不會觸碰垃圾清除點阻礙體,保證無人機飛行狀態下旋翼安全、無觸碰;
3. 實現多方向、多角度旋轉及抓取牢固性,更好地適應峭壁垃圾的復雜地形和“掛枝”白色垃圾不可預測的纏掛狀態,確保垃圾撿拾工作更加高效、安全。
參考文獻:
[1] 張衛東,楊洋. 深入學習貫徹習近平生態文明思想奮力繪就美麗中國新畫卷[J]. 新型城鎮化,2023(11):45-48.
[2] 周慧,鄭金和,趙倩. 基于ZigBee的高空垃圾處理機器人設計[J]. 自動化儀表,2021,42(11):74-77+81.
[3] 王培,李楊,崔根,等. 多旋翼無人機:新設計、新應用及新發展[J]. 人工智能,2021(04):78-91.
[4] 陳旋. 基于四旋翼無人機的運動目標跟蹤控制研究[J]. 計算機與數字工程,2022,50(04):780-785.
[5] 李垚,鄭鵬. 基于重載四旋翼無人機結構設計[J]. 起重運輸機械,2022(08):26-29.
猜你喜歡
中國科技博覽(2016年27期)2017-01-23 01:32:28
農機使用與維修(2016年12期)2017-01-17 15:23:12
安徽理工大學學報·自然科學版(2016年1期)2016-12-14 22:15:06
計算機教育(2016年7期)2016-11-10 09:01:27
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業導報(2016年9期)2016-05-26 20:58:26
中國科技博覽(2016年9期)2016-04-25 10:13:28
現代電子技術(2015年17期)2015-09-23 22:07:14
