基于響應動態約束條件的倉儲AGV路徑規劃協同優化模型
2024-08-28 00:00:00楊震濤
機械制造與自動化 2024年2期
關鍵詞:碰撞

摘"要:為了解決倉儲AGV無碰撞路徑規劃問題,設計響應動態約束條件的倉儲AGV路徑規劃協同優化模型。建立路徑節點模型和車體坐標系模型,獲得倉儲AGV所在位置;建立碰撞描述模型,將全局路徑規劃問題簡化為虛線框架的局部環境,建立時間窗,分別計算空車線段的時間窗、空車轉向段的時間窗,獲得不同工況下的運輸時間。將路徑最短作為動態約束條件,采用目標規劃法對生成的多條路徑求解,處理沖突問題,實現倉儲AGV路徑規劃協同優化。算例分析結果表明:基于無人倉庫二維頂視圖網格系統,在沒有障礙物的工況下,行走柵格較少;在有障礙物的工況下,以兩條路徑為例,未出現碰撞情況,路徑優化效果明顯。
關鍵詞:響應動態約束條件;倉儲;路徑規劃;協同優化;目標函數;碰撞
中圖分類號:TP18""文獻標志碼:B""文章編號:1671-5276(2024)02-0170-05
Collaborative Optimization Model of Warehouse AGV Path Planning Based on Response Dynamic Constraints
YANG Zhengtao
(State Grid Tianjin Procurement Company,Tianjin 300304,China)
Abstract:A collaborative optimization model of storage AGV path planning responding to dynamic constraints is designed for planning a collision free path of storage AGV. Path node model and vehicle body coordinate system model are established to obtain the location of AGV in the warehouse. The collision description model is constructed to simplify the global path planning problem to the local environment of the dotted frame. Time window is built to calculate the time windows of empty car line segment and empty car steering segment respectively, obtaining the transportation time under different working conditions. Based on the shortest path as the dynamic constraint condition, the goal programming method is used to solve the generated multiple paths, deal with the conflicts, and realize the collaborative optimization of warehousing AGV path planning. The results of numerical examples show that, based on the 2D top view grid system of unmanned warehouse, there are fewer walking under the working condition with no obstacles, while under the working condition with obstacles, taking two paths as an example, no collision occurs, and the path optimization effect is obvious.
Keywords:response to dynamic constraints;warehousing;path planning;collaborative optimization;objective function;collision
0"引言
自動導引運輸車(automated guided vehicle, AGV)是智能倉庫中的一個關鍵設備,它在貨物的運輸、堆垛、分揀等過程中起著舉足輕重的作用。隨著自動駕駛設備智能化水平的不斷提高, AGV已被廣泛應用于智能倉庫。
相關學者研究了AGV路徑規劃方法。徐晗等[1]研究了基于拓撲柵格建模的AGV路徑規劃算法的優化方法,介紹了一種基于兩層環境模型的 AGV路線規劃模型并對其路徑規劃算法進行了改進,在該算法中加入了路徑平滑性分析過程,提出了仿真退火的群體選取方法,實現了AGV路徑規劃算法優化;郭興海等[2]研究了一種融合多目標與能耗控制的無人倉庫內AGV路徑規劃方法,以最短路徑、最平滑度為約束條件,采用改進的微粒群算法求解曲率不連續的初始路徑,然后采用貝茲爾曲線和光滑動約束對原始軌跡進行擬合,得到速度變化小、能耗低的連續幾何軌跡,實現了路徑規劃。
以往研究成果雖然能夠實現路徑規劃,但是規劃后的路徑還存在碰撞情況,并且在發生沖突時,路線規劃時間較長。基于此,本文設計一個響應動態約束條件的倉儲AGV路徑規劃協同優化模型,以提高路徑規劃效果。
1"碰撞描述模型
在對路徑規劃之前,需要分析路徑中小車的碰撞問題。在多AGV環境中,事先建立了各路徑節點的坐標,將工作路段的長度記作Q,根據節點坐標和節點的限制,計算得到Q的帶權重臨接矩陣QW,其表示階方陣[3],計算式如下:QW(i,j)=ei-ej,(ri,rj)∈E,(ri,rj)E(1)
式中:QW(i,j)表示i、 j兩個路徑之間的相對位置;ei、ej分別表示相對路徑的節點;(ri,rj)表示兩個節點之間的實際距離值;E表示連通參數。
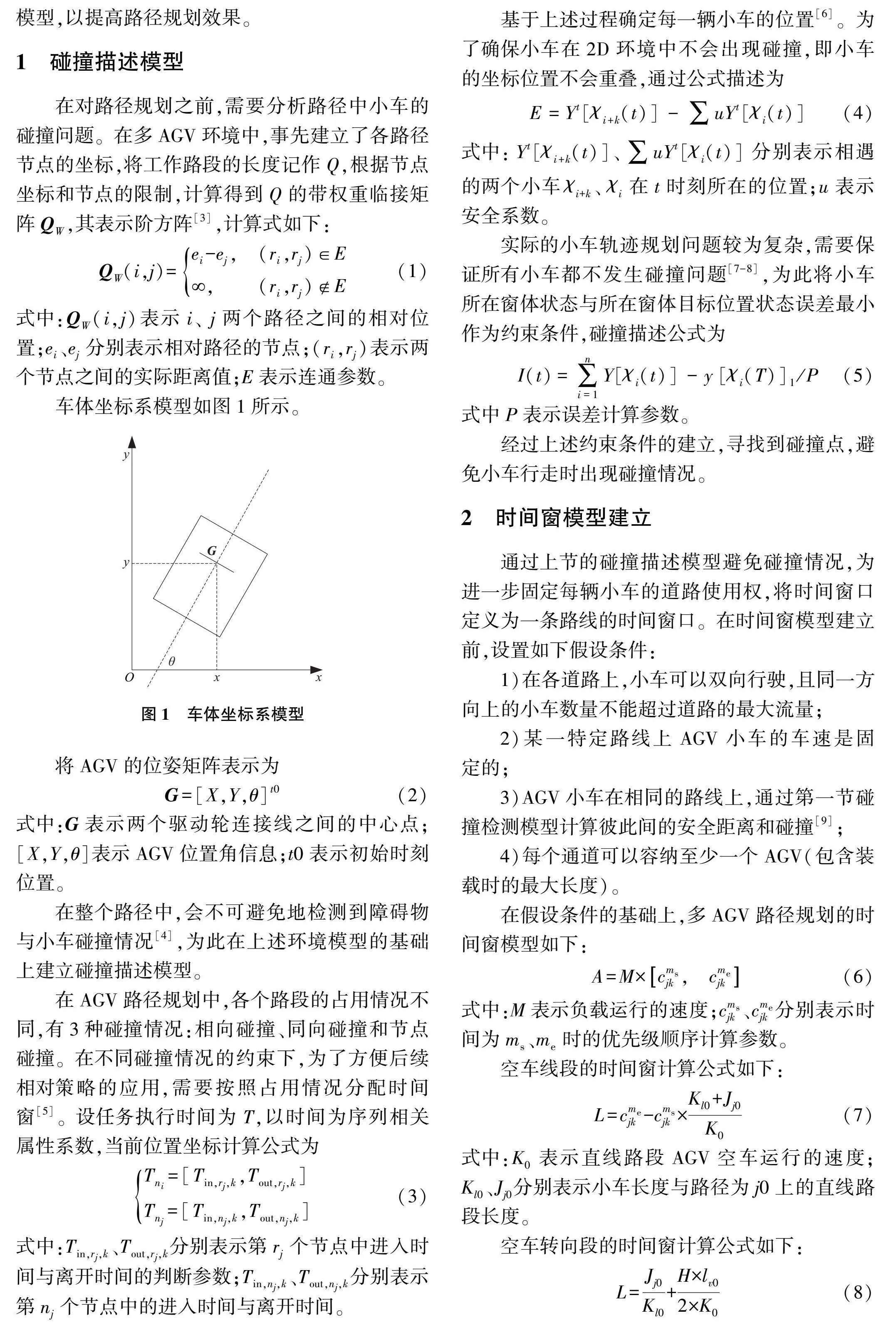
車體坐標系模型如圖1所示。
將AGV的位姿矩陣表示為
G=[X,Y,θ]t0(2)
式中:G表示兩個驅動輪連接線之間的中心點;[X,Y,θ]表示AGV位置角信息;t0表示初始時刻位置。
在整個路徑中,會不可避免地檢測到障礙物與小車碰撞情況[4],為此在上述環境模型的基礎上建立碰撞描述模型。
在AGV路徑規劃中,各個路段的占用情況不同,有3種碰撞情況:相向碰撞、同向碰撞和節點碰撞。在不同碰撞情況的約束下,為了方便后續相對策略的應用,需要按照占用情況分配時間窗[5]。設任務執行時間為T,以時間為序列相關屬性系數,當前位置坐標計算公式為
Tni=[Tin,rj,k,Tout,rj,k]
Tnj=[Tin,nj,k,Tout,nj,k](3)
式中:Tin,rj,k、Tout,rj,k分別表示第rj個節點中進入時間與離開時間的判斷參數;Tin,nj,k、Tout,nj,k分別表示第nj個節點中的進入時間與離開時間。
基于上述過程確定每一輛小車的位置[6]。為了確保小車在2D環境中不會出現碰撞,即小車的坐標位置不會重疊,通過公式描述為
E=Yt[χi+k(t)]-∑uYt[χi(t)](4)
式中:Yt[χi+k(t)]、∑uYt[χi(t)]分別表示相遇的兩個小車χi+k、 χi在t時刻所在的位置;u表示安全系數。
實際的小車軌跡規劃問題較為復雜,需要保證所有小車都不發生碰撞問題[7-8],為此將小車所在窗體狀態與所在窗體目標位置狀態誤差最小作為約束條件,碰撞描述公式為
I(t)=∑ni=1Y[χi(t)]-y[χi(T)]1/P(5)
式中P表示誤差計算參數。
經過上述約束條件的建立,尋找到碰撞點,避免小車行走時出現碰撞情況。
2"時間窗模型建立
通過上節的碰撞描述模型避免碰撞情況,為進一步固定每輛小車的道路使用權,將時間窗口定義為一條路線的時間窗口。在時間窗模型建立前,設置如下假設條件:
1)在各道路上,小車可以雙向行駛,且同一方向上的小車數量不能超過道路的最大流量;
2)某一特定路線上AGV小車的車速是固定的;
3)AGV小車在相同的路線上,通過第一節碰撞檢測模型計算彼此間的安全距離和碰撞[9];
4)每個通道可以容納至少一個AGV(包含裝載時的最大長度)。
在假設條件的基礎上,多AGV路徑規劃的時間窗模型如下:
A=M×cmsjk,cmejk(6)
式中:M表示負載運行的速度;cmsjk、cmejk分別表示時間為ms、me時的優先級順序計算參數。
空車線段的時間窗計算公式如下:
L=cmejk-cmsjk×Kl0+Jj0K0(7)
式中:K0表示直線路段AGV空車運行的速度;Kl0、Jj0分別表示小車長度與路徑為j0上的直線路段長度。
空車轉向段的時間窗計算公式如下:
L=Jj0Kl0+H×lv02×K0(8)
式中:lv0表示路徑v0上的時間窗;K0表示交叉口編號;H表示交叉口的總數目。以此計算不發生其他工況下的行走時間。
3"路徑規劃協同優化
基于時間窗模型,在滿足上述各個約束條件下,AGV運行的總時間最少,即選取的路徑是最短的[10]。在實際的運行中,需要考慮如下內容:
1)考慮AGV小車從等候站返回路線的時間;
2)對AGV小車裝載和卸載的時間計算;
3)當AGV小車在經過十字路口時,其減速和通過之后的加速度需要計算[11]。
采用不同的調節策略能夠得到不同的路徑,但同時會出現不同的沖突工況[12],不同沖突工況下構建的目標函數表示為
G=(Fi)+d/s×∑ni=1cdi(9)
式中:Fi表示在第i個路徑上調節沖突后的時間;d、s分別表示增加的時間量;c表示重新規劃后距離的增加量。
采用目標規劃法進行多目標決策問題求解[13],將綜合指標函數表示為
s′=∑ni=1ω2×ai
ω1×z+ω2×x(10)
式中:ω2、ω1分別表示在沖突調節后距離指標;a、z、x分別表示沖突調節后的不同路徑長度值。
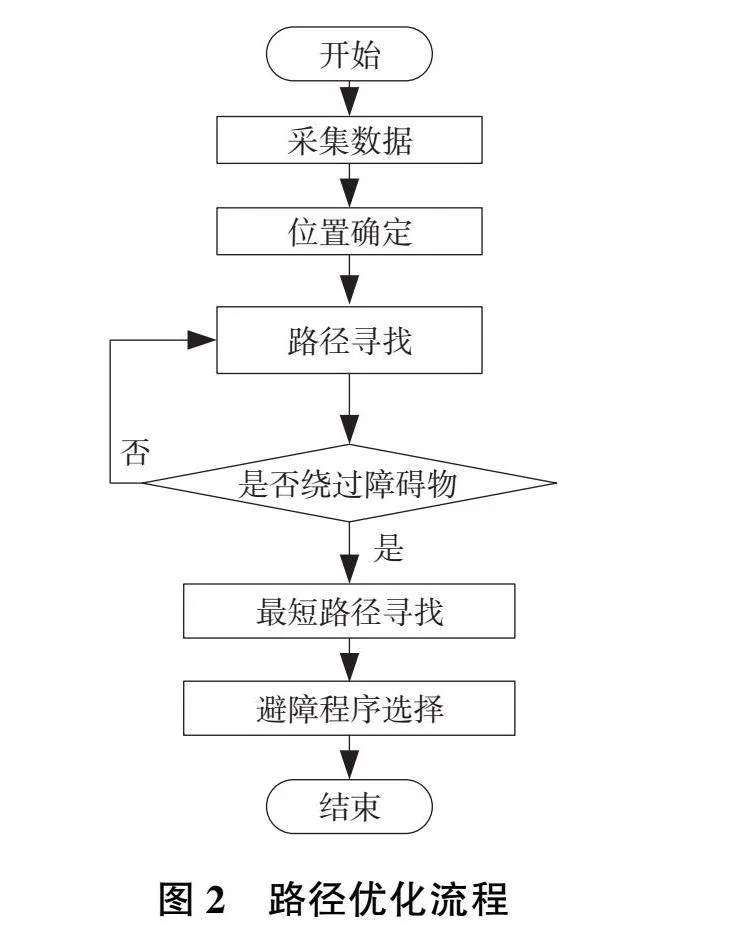
將最短路徑尋找方法與避障模型結合[14],實現路徑優化,避障路徑如圖2所示。
基于上述過程,采用目標規劃法對多目標問題求解,重新對路徑規劃,保證所走路徑花費時間最少,并且避免撞到障礙物。
4"算例分析
4.1"操作環境與參數
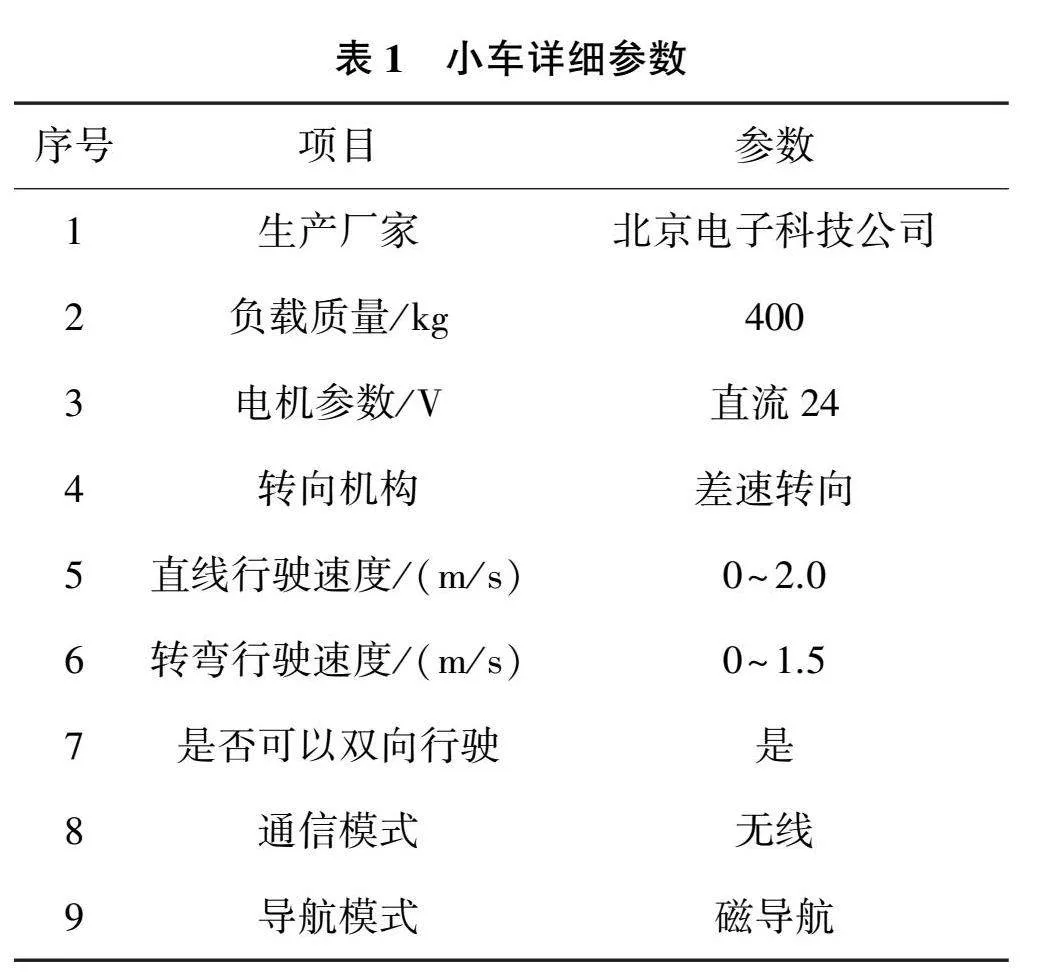
在CPU(Intel (R) Corei7-4710HQ CPU@2.50 HQ), GB內存,64位Windows10操作系統, Python3.5集成開發環境中,算例分析所用小車詳細參數如表1所示。
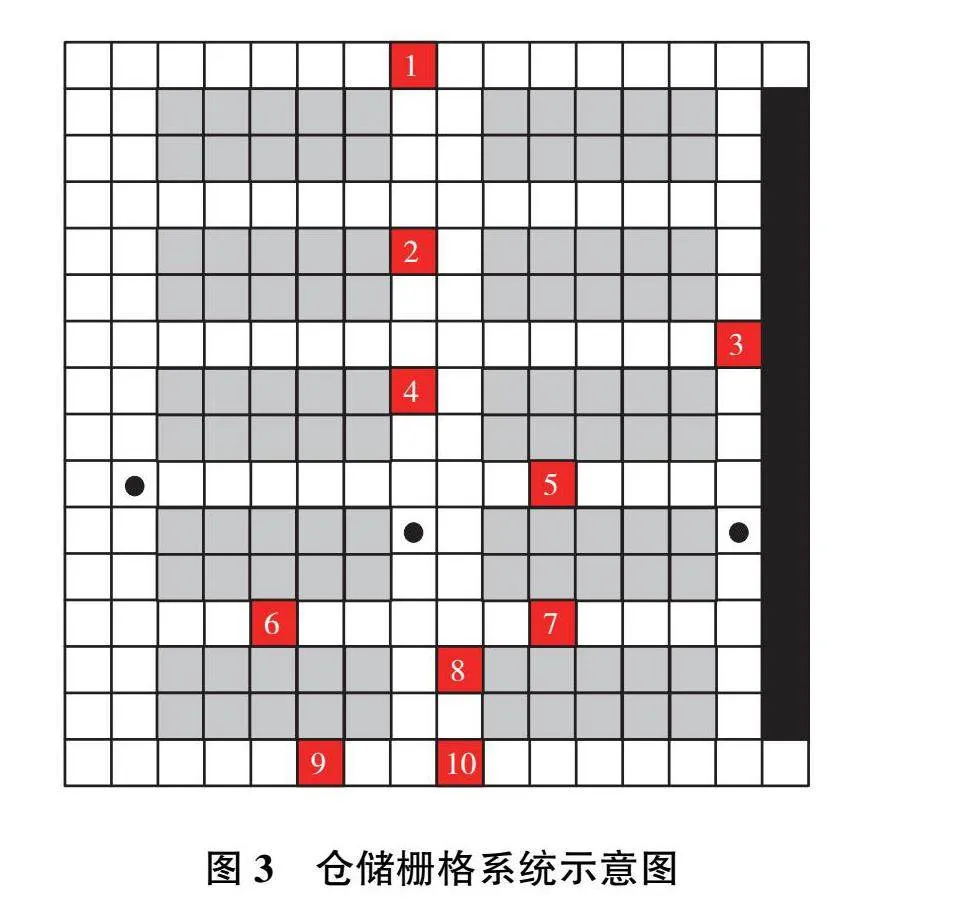
采用Python語言,在Pycharm平臺上開發了一套無人倉庫的二維頂視圖網格系統(20×20),其布局如圖3所示。
圖3中,白色表示可以通行的路徑,灰色表示貨架,紅色表示AGV,黑色表示禁止通行區,黑色圓點表示故障物。設置AGV在1s內通過格柵,指示行駛速度與通過格柵的速度相對應,即本次算例分析過程中,行駛速度是1m/s,則通過柵格的速度也為1m/s(本刊為黑白印刷,疑問之處可向作者咨詢)。
利用拓撲模型建立倉庫電子地圖,使具有配送作業的 AGV能夠在作業過程中進行雙向操作,并將其定義為
nm={c′,v′,b′,…,l′}×k1(11)
式中:c′、v′、b′、l′等分別表示待運輸的貨物;k1表示貨物的搬運狀態。
如果k1為-1時表示任務沒有安排小車,如果為0則表示任務即將被搬運,如果等于1則表示任務在搬運途中。
根據以上方法,對所提物品進行了分類,把工作排隊分為3個優先級,再利用第2個時間窗口的計算方法,對各加點時間窗口進行鎖定。
4.2"結果分析
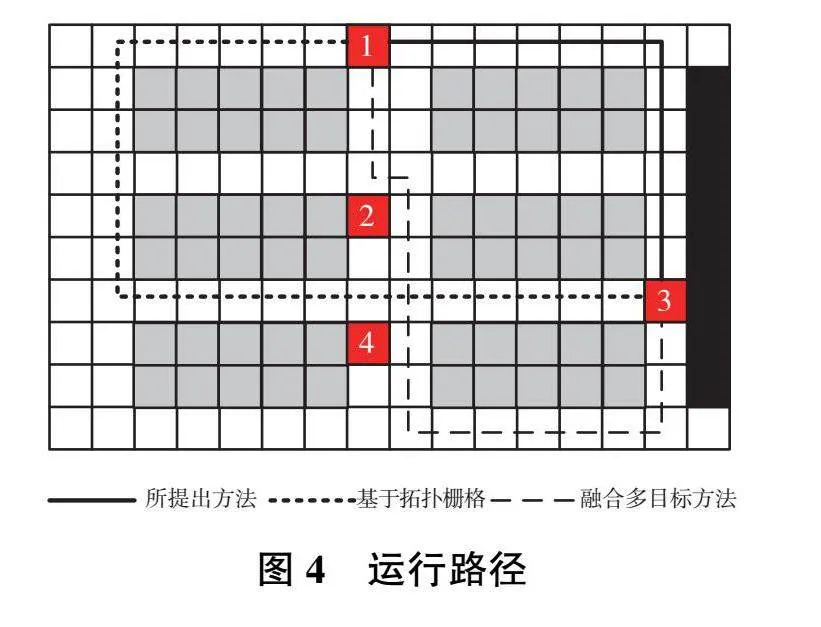
以部分柵格作為分析對象,運行序號1的AGV小車,使其運行到3附近,分別采用3種方法使其運動,對比結果如圖4所示。
分析圖4可知,所提出方法共走過12個柵格到達目標位置,基于拓撲柵格方法共走過24個柵格,融合多目標規劃方法共走過18個柵格。經過對比可知,所提出方法所行走的路徑明顯少于另外兩種方法,各相差12個與6個柵格,優勢較為明顯。
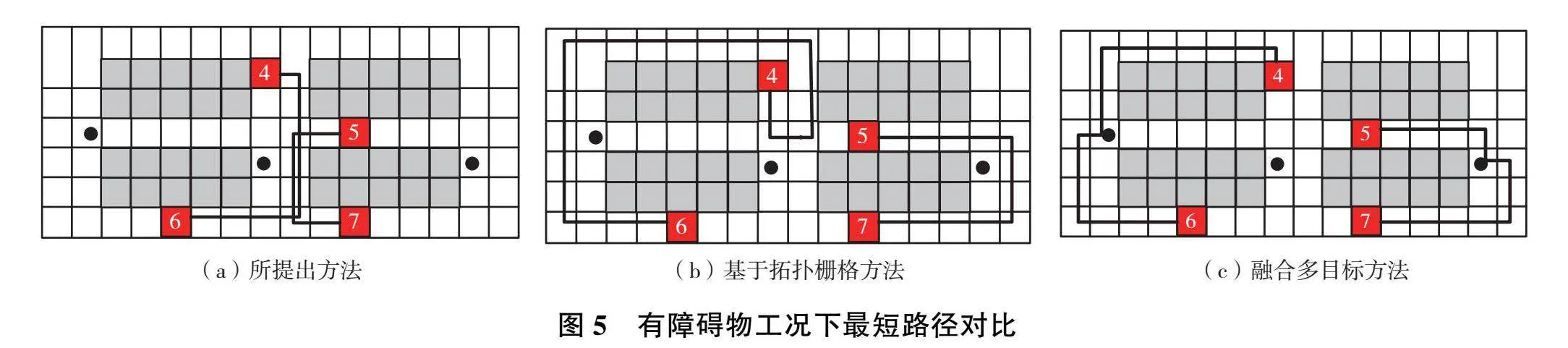
算例分析過程中,3種方法均能夠尋找到相應的路徑,而在實際配送中,會存在障礙物,為此,以上述柵格中有障礙點的部分為例,在有障礙物的工況下對比各個方法的運行工況,對比結果如圖5所示。
圖5中,黑色圓點表示障礙物,分別由序號4小車向序號6小車運輸貨物,由7號小車向5號小車運輸貨物。
所提方法在序號4—序號6運輸路徑尋找上共走過9個柵格,沒有發生碰撞情況;在7號小車到5號小車運輸路徑上尋找,共走過6個柵格,這兩條路徑尋找沒有出現碰撞到障礙物的工況,均從障礙物周圍繞過。
基于拓撲柵格模型的方法,在序號4—序號6運輸路徑尋找上共走過23個柵格,尋找路徑較遠。原因是,在遇到障礙物的工況下,該方法選擇從其他路段繞過,走到目的地,在這個過程中沒有尋找到最短的路徑;在7號小車到5號小車運輸路徑尋找上,共走過12個柵格。
融合多目標規劃方法在規劃后,在序號4—序號6運輸路徑上尋找共走過17個柵格;在7號小車到5號小車運輸路徑上尋找共走過12個柵格。在這兩條路徑尋找過程中,均發生碰撞情況,在發生碰撞后,選擇其他路徑進行運輸貨物。
通過上述對比結果可知,所提出方法在序號4—序號6號運輸上,尋找到的路徑較基于拓撲柵格方法少走14個柵格,較融合多目標規劃方法少走8個柵格;在7號小車—5號小車路徑尋找上,較基于拓撲柵格方法、融合多目標規劃方法少走6個柵格,證明所提出方法在有障礙物的工況下也能夠尋找到最短路徑,不發生碰撞情況。此次研究的優化模型效果較好的原因是:預先建立了障礙物模型,在路徑規劃初始階段,充分考慮障礙物的影響并將尋找最短路徑作為目標,有效提高了路徑尋找效果。
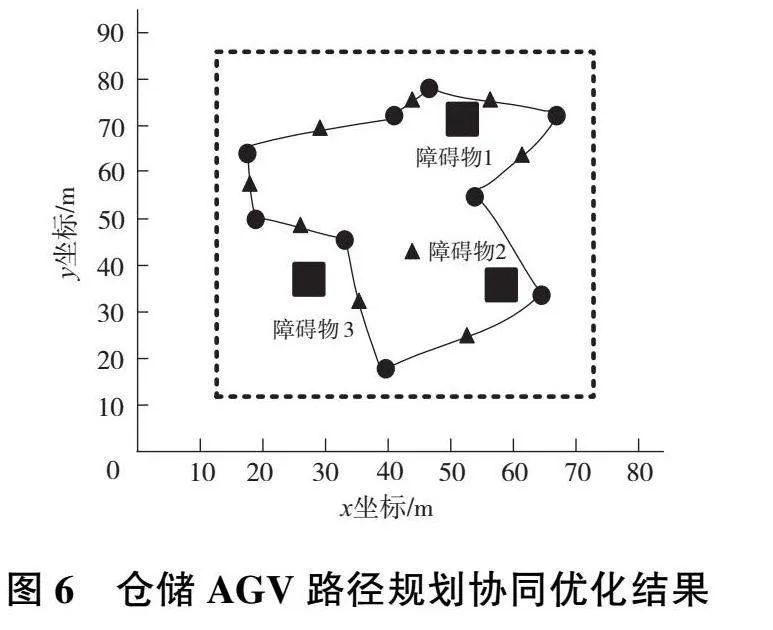
5"實例分析
基于全面性和相互獨立性的原則,應用ET200S遠程通信模塊與PLC建立profinet通信連接小車,在720m2的范圍內進行實例分析,即展示倉儲AGV路徑規劃協同優化結果。以實心圓點和實心三角形代表兩輛小車標志點,在同一條路線的時間窗口內,設置同一個裝載任務,應用本文方法進行路徑規劃,驗證其協同性,驗證結果如圖6所示。
如圖6所示,在兩輛小車同時執行裝載任務時,本文方法可以同時繞開障礙物,避開同類小車且覆蓋面較廣,有利于保證倉儲AGV行駛過程的安全性。
6"結語
本文研究了倉儲AGV路徑規劃協同優化方法,研究成果如下:
1)在分配時間窗的過程中,考慮到了相向碰撞、同向碰撞和節點碰撞的情況,降低了AGV路徑的阻塞程度,走過12個柵格即可到達目標位置,從根本上減少路徑距離,提高效率;
2)設定優化目標并設定動態約束條件,整個運輸路徑上沒有發生碰撞情況,實現了路徑的最優規劃;
3)在沒有障礙物與有障礙物工況下,小車均能夠尋找到最短路徑,并不發生碰撞,在很大程度上提高了倉儲的運作效率。
此次研究獲得了較好的應用效果,但是還有不足之處,因為貨架調度具有動態性,在后續研究中還需要結合該特點做進一步分析。
參考文獻:
[1] 徐晗,金隼,羅磊,等. 基于拓撲柵格建模的AGV路徑""規劃算法優化[J]. 計算機工程與設計,2022,43(1):101-109.
[2] 郭興海,計明軍,劉雙福. 融合多目標與能耗控制的無人倉庫內AGV路徑規劃[J]. 計算機集成制造系統,2020,26(5):1268-1276.
[3] 李俊蘭,張中偉,吳立輝,等. 面向多運輸任務的節能單負載AGV路徑規劃研究[J]. 制造技術與機床,2022(3):62-67.
[4] 楊瑤,付克昌,蔣濤,等. 啟發式RRT算法的AGV路徑規劃[J]. 計算機工程與應用,2020,56(12):125-133.
[5] 張飛,張彬,周烽,等. 面向自動倉儲的繩索牽引并聯機器人構型選擇與參數優化[J]. 機械工程學報,2020,56(1):1-8.
[6] 余娜娜,李鐵克,王柏琳,等. 自動化分揀倉庫中多AGV調度與路徑規劃算法[J]. 計算機集成制造系統,2020,26(1):171-180.
[7] 于軍琪,李若琳,趙安軍,等. 并行排序蟻群算法規劃倉庫AGV路徑研究[J]. 機械科學與技術,2021,40(4):609-618.
[8] 王曉軍,楊春霞,陳航慧,等. 考慮倒箱操作的AutoStore魔方型倉儲系統自動引導車雙層路徑規劃[J]. 科學技術與工程,2021,21(36):15546-15554.
[9] 姜興宇,王明皓,劉偉軍,等. 藥品倉庫堆垛機與AGV集成調度優化[J]. 計算機集成制造系統,2022,28(1):230-241.
[10] 陳廣鋒,余立潮. 多幀時間窗輪換算法規劃倉儲多AGV小車路徑[J]. 計算機工程與應用,2020,56(23):270-278.
[11] 王曉軍,王博,楊春霞,等. 緊致密集Auto Store系統AGV路徑規劃與避碰策略[J]. 計算機工程與應用,2021,57(15):259-270.
[12] 袁洋,葉峰,賴乙宗,等. 結合負載均衡與A*算法的多AGV路徑規劃[J]. 計算機工程與應用,2020,56(5):251-256.
[13] 馮浩然,吳瑞明,傅陽,等. 基于ROS與融合算法的AGV路徑規劃研究[J]. 機床與液壓,2022,50(9):55-60.
[14] 廉胤東,謝巍. 基于視覺引導多AGV系統的改進A*路徑規劃算法[J]. 控制與決策,2021,36(8):1881-1890.
收稿日期:20221024
猜你喜歡
課程教育研究·學法教法研究(2016年25期)2016-11-17 12:51:00
中國科技博覽(2016年21期)2016-11-14 16:55:34
家用汽車(2016年8期)2016-11-02 18:35:54
戲劇之家(2016年19期)2016-10-31 17:31:21
考試周刊(2016年59期)2016-08-23 17:58:29
科技視界(2016年15期)2016-06-30 19:59:38
考試周刊(2016年28期)2016-05-27 15:11:06
科技視界(2016年8期)2016-04-05 23:16:20
科技視界(2016年7期)2016-04-01 20:06:32
文學教育下半月(2015年6期)2015-06-15 03:46:16
