基于人工智能算法的田間農機作業無人化管理系統設計
2024-12-31 00:00:00吳曉偉駱庭寶
安徽農學通報 2024年17期
關鍵詞:機器視覺


摘要" 本研究以農田田塊為管理對象,設計一套智能化管理系統,以掌握田間農機作業的具體情況,包括作業農機類型、對應農事活動和作業時間等信息。具體而言,以人工智能算法為基礎,通過機器視覺方法,自動捕捉并識別田間農機,從而獲取準確的田塊作業農機類型及其所關聯的生產信息。整個系統集成了感知設備、人工智能算法和應用軟件平臺,其構成簡單,環境通用性強,可以為農場的無人化管理提供有效工具,為生產管理模式提供參考。
關鍵詞" 人工智能算法;機器視覺;農業機械識別;農機作業
中圖分類號" S24" " " "文獻標識碼" A" " " "文章編號" 1007-7731(2024)17-0096-05
DOI號" 10.16377/j.cnki.issn1007-7731.2024.17.023
Design of unmanned management system for field agricultural machinery operations based on artificial intelligence algorithms
WU Xiaowei" " LUO Tingbao
(Anhui Zhongke Intelligent Sense Technology Co., Ltd., Wuhu 241000, China)
Abstract" The farmland was taken as management object, and an intelligent management system was designed to grasp the specific situation of agricultural technology operations in the field, including the type of agricultural machinery, corresponding agricultural activities, and operation time. Specifically, based on artificial intelligence algorithms, machine vision methods were used to automatically capture and agricultural machinery were recognized in the field, thereby obtaining accurate types of agricultural machinery for field operations and their associated production information. The entire system integrated sensing devices, artificial intelligence algorithms, and application software platforms, with simple composition and strong environmental universality, which could provide effective tools for unmanned management of farms, and provide references for new production management models.
Keywords" artificial intelligence algorithms; machine vision; agricultural machinery identification; machinery operation
大田農業種植生產過程中,農業機械作業的管理是貫穿種植周期的重要環節之一。智慧農業采用智能化裝備和系統,對農業基礎設施進行現代化改造,極大提升了農業生產管理的效率。羅錫文等[1]以植物生產為例,介紹了智能農機的智能感知、自動導航、精準作業和智慧管理等功能,分析了集成相關智能農機創建水稻無人農場的實踐和無人農場的特點,包括耕種管收生產環節全覆蓋、機庫田間轉移作業全自動、自動避障異況停車保安全、作物生產過程實時全監控和智能決策精準作業全無人化。胡健[2]研究認為,大田農業生產正逐步向自動化、智能化演進。在農業土地大規模、跨區域流轉和種植托管模式不斷發展的背景下,大田農業種植生產中的農業機械作業成為農業管理的重要一環,如農機的具體作業范圍、作業面積、在不同地塊的作業時間以及作業效率等,均是生產管理的重要組成部分。孫夢遙等[3]示范推廣了集物聯網、大數據應用為一體的農機深松整地作業遠程監測技術,結合田間試驗進行校驗,農機作業管理通過為每臺農機裝配專用傳感器和物聯網設備,收集農機的具體位置數據,掌握特定農機的作業面積和作業質量。結果表明,該技術為深松整地作業補貼提供了科學量化依據。實踐中,由于大量農機跨區域作業,或暫未配置監測設備,種植者難以有效掌握農機在田間的具體作業時間和作業情況。此外,種植者的農田生產種植計劃通常以每個地塊為單位,單個農機的作業數據很難與具體的農田地塊信息相匹配,管理需求有待得到進一步滿足,農場的無人化管理有待更新更加匹配的監測技術手段[4]。
本研究以農田地塊為管理核心,利用人工智能算法開發了一套農機圖像識別技術,使用固定式攝像機作為數據采集工具,實現了田間農機作業的無人化管理。該識別技術能夠自動辨識農機的類型,結合系統可以進一步獲取農機作業的類型、農事活動的開始和結束時間等信息,并判斷這些信息是否與農事計劃相符,從而實現高度自動化田間管理。
1 系統架構與業務構成分析
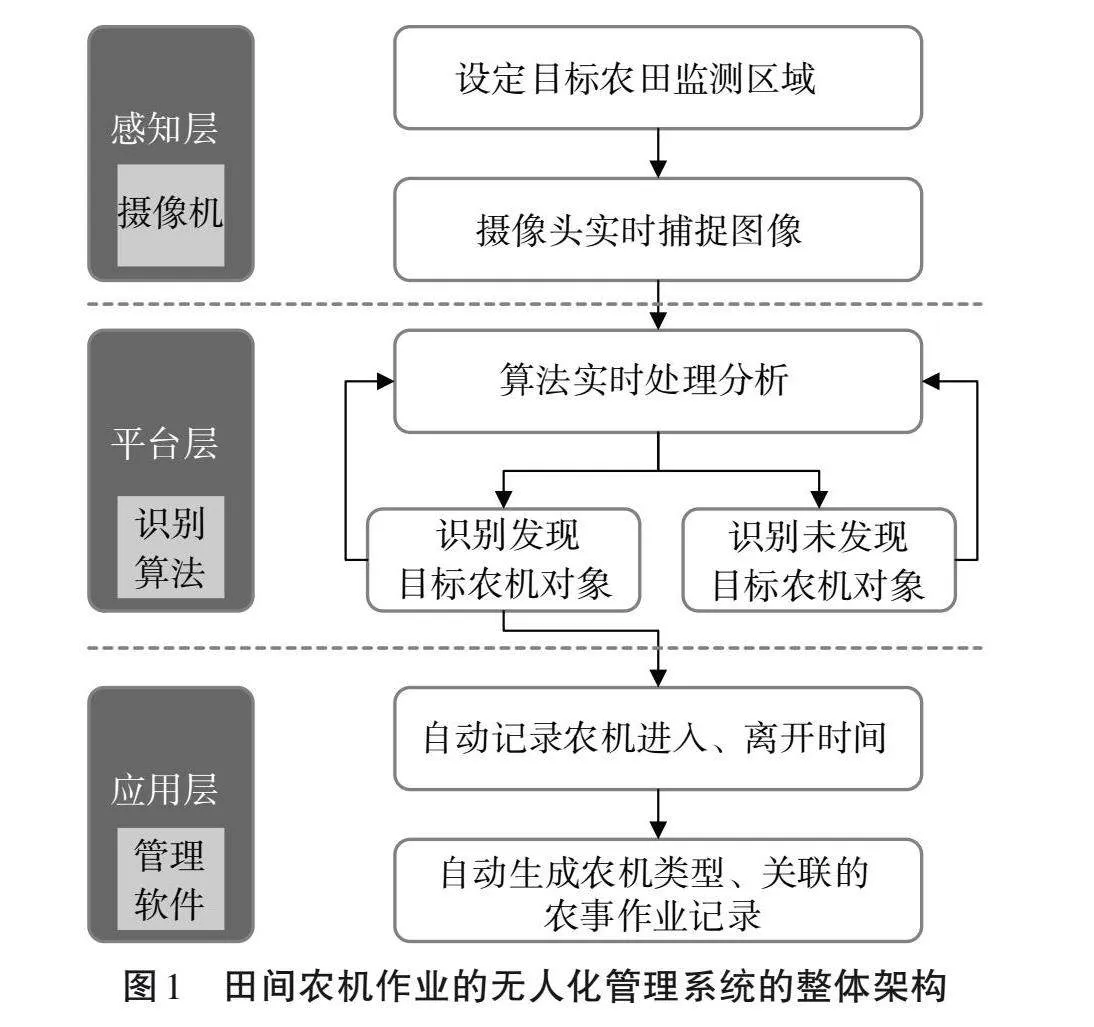
整體系統采用了分層架構策略,分為感知層、平臺層和應用層(圖1),以優化農業管理流程和提高系統的可維護性。感知層由固定式攝像機組成,攝像機配備了1/1.8、約400萬像素的互補金屬氧化物半導體(Complementary metal oxide semiconductor,CMOS)圖像傳感器,并安裝于5.5 m高的立桿上,以覆蓋農田的監測需求。通過寬帶網絡,攝像機將捕獲的圖像數據實時傳輸至互聯網平臺,實現與系統軟件平臺的數據對接。平臺層的核心功能為農機識別算法,負責對攝像機視野內的視頻圖像進行連續識別、處理與數據存儲。應用層則面向用戶,提供了一套田間農機作業無人化管理軟件,為農田種植管理設計并實現監測農機活動、統計農事信息等功能。
2 系統業務實現方案分析
該系統的業務實現分為以下關鍵步驟。首先,調整田間配置攝像機的角度和視野范圍,精確設定攝像機所需監測的農田區域,確保攝像機可以不間斷地采集視頻數據,實時捕捉目標田塊的圖像信息。其次,平臺層的農機識別算法對所捕獲的視頻圖像進行連續處理和分析。當算法識別出目標對象時,會將識別結果及相關信息(如出現時間、農機類型和攝像機編號等)傳遞給應用層軟件,并繼續執行識別分析任務。若未發現目標農機對象,算法將持續進行識別分析。最后,應用層軟件根據所接收的農機識別結果及附加信息,自動記錄農機進入和離開特定農田區塊的時間,并計算目標農機在特定區塊的準確作業時長。這與王登輝等[5]利用車載路由器組建播種監測終端和車載計算機之間的局域網,實現對播種數據與導航數據的融合同步,并通過網絡連接傳輸給云平臺進行數據存儲與實時展示有相似之處。此外,該應用層軟件還可根據農機類型的識別結果自動生成相應的農事作業記錄,并與農事計劃進行自動對照,從而輔助管理人員落實和確認農事計劃的執行情況。例如,收獲機對應收獲作業,插秧機對應插秧作業等。為保證識別時效性,平臺層的識別算法會直接讀取攝像機視頻流數據,并進行動態識別分析,將時間延遲控制在50 ms以內。
3 系統農機識別算法實現分析
平臺層的農機識別技術基于物體檢測基礎算法[6],旨在實現對特定農機圖像的準確識別。為訓練農機識別模型,首先,界定目標識別對象為插秧機、拖拉機和收獲機3種農機,并將應用場景限定在1.3 hm2以下的農田中。該界定面積是農田的常見規格,適合大多數常用攝像機的清晰視野范圍。其次,構建田間農機圖像訓練樣本的數據集,使用樣本數據集和物體檢測算法進行農機識別模型訓練。再次,對訓練模型進行測試,并基于測試結果對模型作進一步優化。最后,當滿足應用需求的模型完成并通過測試后,將完整的識別算法結合識別模型導入服務器,集成到應用系統中。系統農機識別算法實現流程如圖2所示。
3.1 數據集準備
在數據集的構建過程中,主要采用兩種方法來收集圖像樣本。一是直接在農田現場通過安裝的攝像機捕捉農機視頻圖像,并從中提取具有訓練價值的靜態圖像幀;二是使用網絡爬蟲工具在互聯網上搜索實際農機作業場景的圖片,特別是拍攝角度與田間攝像機相似的圖片。以上兩種方法為模型訓練提供了豐富有效的圖像樣本庫。
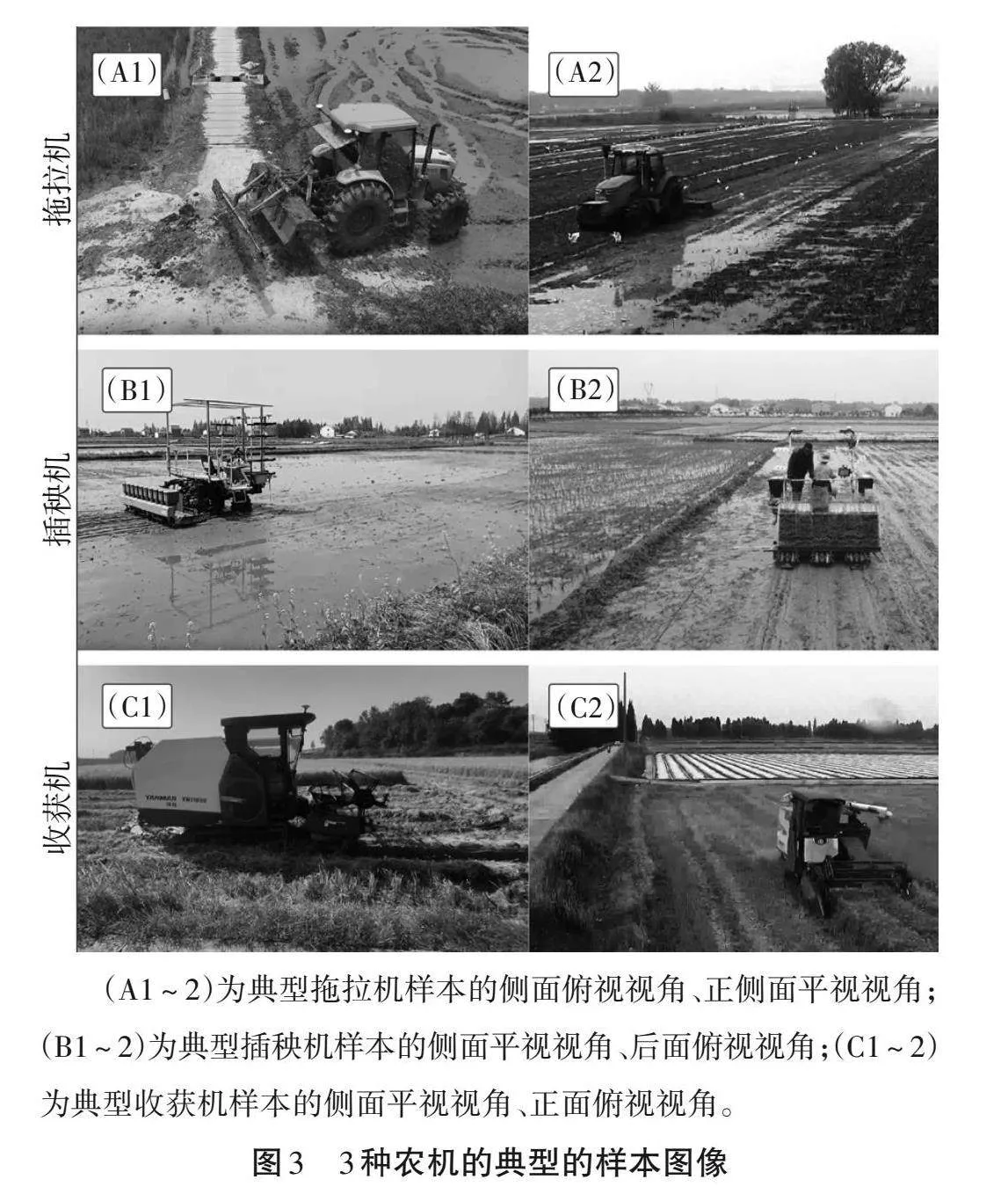
為確保數據集的多樣性,在以水稻種植為主的農場進行圖像數據的采集。共安裝了30套標準攝像機,按照農機距離攝像機0~100和100~200 m的范圍,對收集到的圖像進行分類。此外,考慮農機在實際作業中可能出現不同的拍攝角度和方向,以及不同時間拍攝導致圖像亮度和對比度存在一定差異,在采集圖像樣本時,專門在不同的時間段(早、中和晚)以及不同的光照條件(順光、逆光等)下收集多類圖像樣本。典型的樣本圖像如圖3所示,展示了拖拉機、插秧機和收獲機在不同角度、光照度和距離條件下的情況,以確保訓練模型的全面性和準確性。
(A1~2)為典型拖拉機樣本的側面俯視視角、正側面平視視角;(B1~2)為典型插秧機樣本的側面平視視角、后面俯視視角;(C1~2)為典型收獲機樣本的側面平視視角、正面俯視視角。
3.2 模型訓練與優化
在成功收集大量樣本數據后,將原始圖像數據進行分類和清洗,以形成適用于算法模型訓練的訓練數據集及用于后續測試的測試數據集。隨后,對訓練數據集進行標注,并將標注后的數據集輸入算法中進行模型訓練。通過訓練得到的農機圖像識別模型被集成到系統中,使用測試數據集對模型的識別效果進行驗證和評估。為全面評估算法性能,在虛擬環境和現場實地均開展測試,檢驗算法標準測試數據集及通過攝像機實時拍攝的視頻圖像,并實時動態識別檢測性能。算法模型的測試重點關注兩個核心指標,分別為通過視頻圖像發現農機的檢出率,以及檢出農機后對農機類型識別的正確率。
初步建立的算法模型經實測發現其中存在許多特異化的農機運行場景,這些場景要求對模型進行進一步的數據采集完善和程序優化處理。例如,在水稻種植處于播種、插秧等生育早期階段,農田中大面積連片水面產生的反光、倒影可能會干擾識別過程;當農作物進入成熟期,生長高度較高時,受攝像機拍攝角度影響,在圖像中農作物可能會大范圍遮擋農機,導致算法無法準確提取農機特征,從而可能漏檢;同一大類農機存在不同款型、樣式差異,如水稻收獲機有、無封閉駕駛室的區別,喂入量、輸運方式等因素的不同而導致外形樣式、尺寸和主體結構存在差異。對于上述問題,采取樣本數據的進一步擴充和算法優化,以提高算法的識別能力,增強其準確性和適用性,滿足農業生產實際中的需求。這與鮑文霞等[7]使用田間采集的作物圖像數據集對模型進行預訓練,再使用無人機采集的作物圖像數據集對模型進行參數更新和優化訓練,并在無人機采集的圖像數據集上進行試驗的做法存在相似之處。
4 算法模型應用效果分析
4.1 識別應用效果
在對所開發的算法模型進行多輪迭代和驗證之后,將該模型集成到田間農機作業無人化管理系統中,以評估其實際應用性能。如圖4所示,該算法模型能夠在圖像中準確框選,并標注出所識別的農機類型。圖4A展示了插秧機在水田中的識別結果。插秧階段需要灌溉泡田,存在大面積水面,且插秧機背面朝向攝像機,識別算法在這種復雜狀態下亦實現了準確檢出和識別。圖4B~C分別展示了拖拉機、收獲機在田間作業的圖像,其中,拖拉機距離攝像機約60 m,收獲機距離攝像機約150 m,識別算法對兩者均實現了準確檢出,并準確判斷了農機類型。在圖4C中,收獲機周圍存在明顯塵土干擾,且拍攝圖像為其側后方,算法模型亦做出了準確識別,體現了其良好的抗干擾能力。圖4D展示了同時出現3臺農機(2臺收獲機和1臺拖拉機)的情況,較近的收獲機距離攝像機約40 m,較遠的收獲機和拖拉機距離攝像機均超過100 m。該算法模型不僅成功檢出了所有農機,還準確識別了其各自的類型,證明具備高效的多目標檢測能力。值得指出的是,圖4D中遠處的拖拉機距離較遠且在圖像邊緣,成像尺寸較小,該算法模型依舊準確檢出并識別了農機類型,展現了其在小目標檢測方面的優秀性能。
4.2 算法模型評估
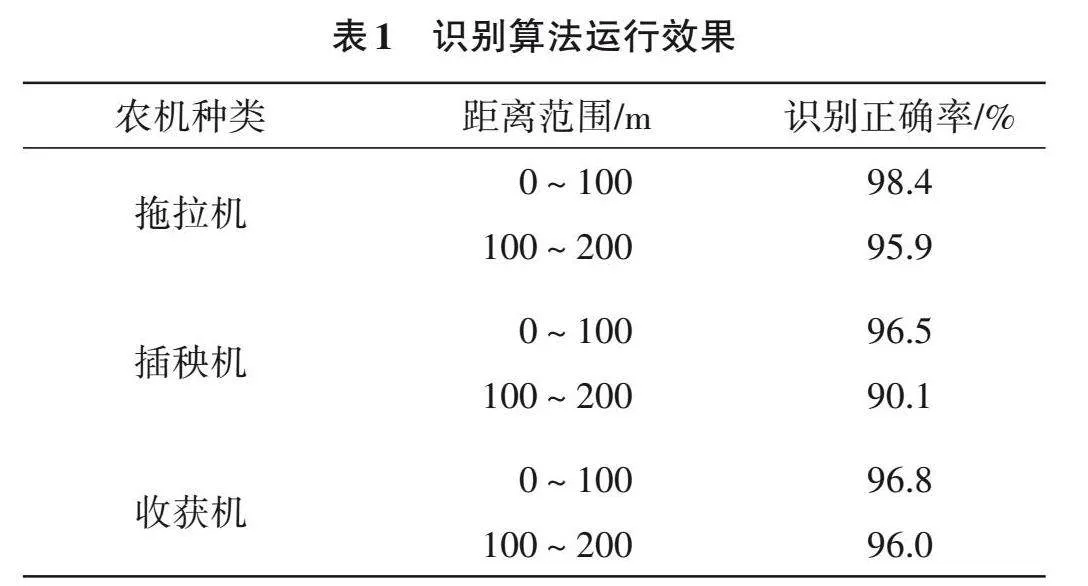
該算法模型主要從所拍攝的農機圖像識別檢出率和檢出后兩個維度來評估識別算法對農機類型的識別正確率。為全面評定所開發算法的性能,選取每種機型各400張圖像進行分析,這些圖像中農機與攝像機的距離分布在0~100和100~200 m,每個范圍各選取200張。
插秧機、拖拉機和收獲機3種農機在不同距離范圍內的識別檢出率均較高,在0~100 m范圍內,各機型的檢出率均超過85%,其中,拖拉機和收獲機的檢出率超過了90%;在100~200 m范圍內,拖拉機和收獲機的檢出率保持在85%以上,插秧機檢出率較低,為71%。
進一步對檢出的農機識別正確率進行分析,再次考察該算法模型對已檢出農機的測試圖像所判斷的農機類型正確與否。具體統計數據如表1所示,結果顯示,在0~100 m范圍內,3種農機的識別正確率均超過95%;在100~200 m范圍內,3種農機的識別正確率均超過90%,其中插秧機的識別正確率相對較低,為90.1%。這一結果與插秧機較低的識別檢出率呈現一致性。
綜合分析上述識別檢出率和識別正確率的數據發現,插秧機總體指標相比拖拉機和收獲機偏低,原因可能是插秧機的體積較小,且機體上部外觀結構大多為細框架,導致其在遠距離識別時易與背景融合,被算法模型遺漏。
基于測試情況,拖拉機等3種農機在0~100 m范圍內,均具備了較高的準確度;在100~200 m范圍內,識別拖拉機、收獲機的準確度較高,對插秧機的識別尚需進一步完善才能具備較好的實用性。不同距離范圍內的識別檢出率和識別正確率測試結果表明,所開發的算法模型能夠有效支持無人化監測。
4.3 整體系統應用效果
本研究開發的整體系統集成了田間安裝的攝像機實時監測農機作業,實現了迅速識別農機類型的核心功能。所開發的算法模型不僅在單一目標檢測上表現出色,在復雜環境下的多目標檢測和小目標檢測方面也具有強大的應用能力和高度的檢測準確性。基于識別結果,系統軟件應用實現了記錄各農田地塊中農機作業的起止時間,進而根據農機類型推斷農事活動種類等功能,并自動生成和記錄農事活動。這不僅提高了農機作業監測的實時性和準確性,而且通過自動化數據處理,優化了農場管理流程。這與王偉康等[8]利用無人系統采集多光譜影像,通過人工神經網絡算法融合光譜和紋理信息,有效提升了監測精度具有一定的相似之處。
5 結語
本研究設計了一套基于人工智能算法的無人化農機作業管理系統,該系統利用視覺圖像識別技術,實現了對田間農機作業情況的自動化監測與管理。通過專門針對拖拉機、插秧機和收獲機3種主要農機類型的圖像識別算法模型,無需人工干預,依賴機器視覺技術,可準確識別農機類型,并掌握關聯作業的相關信息。基于目前的設計成果,后續工作將圍繞3個主要方向進行:一是參考石欣等[9]的研究,進一步完善算法與攝像機設備的配合,提高遠距離、小尺寸農機,特別是類似插秧機的識別檢出率和識別正確率;二是參考Cheng等[10]的研究,擴展可識別的農機種類,包括自走式噴桿噴霧機、打捆機等;三是加強算法對農機攜帶或拖掛農機具的識別能力,以便通過農機具的識別更準確地判斷當前的農事活動,例如,通過拖拉機攜帶的農機具,判斷拖拉機正在從事耕地或者施肥工作。
該系統的應用降低了人工管理成本,提高了管理效率和質量,實現了農田管理的連續性和自動化,可以作為無人化農場運營管理體系建設的一個有效組成部分,為無人化農場的發展提供新的技術手段和管理工具。
參考文獻
[1] 羅錫文,廖娟,胡煉,等. 我國智能農機的研究進展與無人農場的實踐[J]. 華南農業大學學報,2021,42(6):8-17.
[2] 胡健. 淺談數字技術賦能農業高質量發展[J]. 安徽農學通報,2022,28(8):152-154.
[3] 孫夢遙,徐嵐俊,宮少俊,等. 農機深松整地作業遠程監控技術示范應用與效果評價[J]. 農業工程,2021,11(12):30-34.
[4] XU J P,ZHAO W X,WEI C Y,et al. A model for recognizing farming behaviors of plantation workers[J]. Computers and electronics in agriculture,2022,202:107395.
[5] 王登輝,盧邦,李強,等. 油菜直播機組無人播種作業遠程監測系統設計[J]. 華中農業大學學報,2023,42(3):260-270.
[6] SHENG J J,SUN Y Q,HUANG H,et al. HBRNet:boundary enhancement segmentation network for cropland extraction in high-resolution remote sensing images[J]. Agriculture,2022,12(8):1284.
[7] 鮑文霞,謝文杰,胡根生,等. 基于TPH-YOLO的無人機圖像麥穗計數方法[J]. 農業工程學報,2023,39(1):155-161.
[8] 王偉康,張嘉懿,汪慧,等. 基于固定翼無人機多光譜影像的水稻長勢關鍵指標無損監測[J]. 中國農業科學,2023,56(21):4175-4191.
[9] 石欣,盧灝,秦鵬杰,等. 一種遠距離行人小目標檢測方法[J]. 儀器儀表學報,2022,43(5):136-146.
[10] CHENG G,YUAN X,YAO X W,et al. Towards large-scale small object detection:survey and benchmarks[J]. IEEE transactions on pattern analysis and machine intelligence,2023,45(11):13467-13488.
(責任編輯:楊歡)
猜你喜歡
軟件導刊(2016年11期)2016-12-22 21:52:17
電腦知識與技術(2016年28期)2016-12-21 12:13:14
科技視界(2016年26期)2016-12-17 17:31:58
科技視界(2016年25期)2016-11-25 19:53:52
科技視界(2016年25期)2016-11-25 09:27:34
科教導刊(2016年25期)2016-11-15 17:53:37
軟件工程(2016年8期)2016-10-25 15:55:22
科技視界(2016年20期)2016-09-29 11:11:40
科技視界(2016年6期)2016-07-12 09:12:40
科技視界(2016年15期)2016-06-30 19:03:30