基于CFD仿真植保無(wú)人機(jī)在各工況下對(duì)施藥效果的影響
2024-12-31 00:00:00許天富趙海燕桑維鈞劉健鋒謝康孫光軍
中國(guó)農(nóng)機(jī)化學(xué)報(bào) 2024年7期
關(guān)鍵詞:風(fēng)速




摘要:為探究多旋翼植保無(wú)人機(jī)在不同工況下對(duì)施藥效果的影響,明確兩款多旋翼植保無(wú)人機(jī)結(jié)構(gòu)設(shè)計(jì)優(yōu)缺點(diǎn),規(guī)范植保無(wú)人機(jī)在飛防作業(yè)中的參數(shù)設(shè)置。試驗(yàn)以兩款多旋翼植保無(wú)人機(jī)為對(duì)象,采用CFD仿真模擬植保無(wú)人機(jī)在不同工況下的流場(chǎng)分布、風(fēng)場(chǎng)幅寬、飄移情況。結(jié)果表明:兩款植保無(wú)人機(jī)主要風(fēng)場(chǎng)幅寬可達(dá)6~12 m,次要風(fēng)場(chǎng)幅寬可達(dá)12~20 m;增加飛行高度、飛行速度可以獲得較大的噴灑面積,但風(fēng)場(chǎng)穿透力減弱、霧滴飄移距離增加,順風(fēng)作業(yè)有利于改善施藥效果;四旋翼植保無(wú)人機(jī)相較于六旋翼植保無(wú)人機(jī)平衡性更好,下壓力及抗飄移能力都有一定優(yōu)勢(shì),且風(fēng)場(chǎng)分布均勻規(guī)整,更有利于噴灑均勻。可為后續(xù)植保無(wú)人機(jī)機(jī)型結(jié)構(gòu)優(yōu)化提供思路和為植保無(wú)人機(jī)飛防作業(yè)參數(shù)設(shè)置提供理論依據(jù)。
關(guān)鍵詞:植保無(wú)人機(jī);數(shù)值模擬;飛行高度;飛行速度;風(fēng)速
中圖分類號(hào):S251
文獻(xiàn)標(biāo)識(shí)碼:A
文章編號(hào):20955553 (2024) 070087
10
Influence of plant protection UAV on the effect of pesticide application under various
operating conditions based on CFD simulation
Xu Tianfu1, Zhao Haiyan1, Sang Weijun1, Liu Jianfeng2, Xie Kang1, Sun Guangjun3
(1. College of Tobacco Science, Guizhou Key Laboratory for Tobacco Quality Research, Guizhou University,
Guiyang, 550025, China; 2. Institute of Entomology, Guizhou University, Guiyang, 550025, China;
3. Guizhou Province Company, China National Tobacco Corporation, Guiyang, 550001, China)
Abstract:
In order to explore the impact of multi-rotor plant protection UAV on pesticide application under different working conditions, the advantages and disadvantages of the structural design of two multi-rotor plant protection UAVs were clarified, and the parameter settings of plant protection UAV in flight prevention operations was standardized. In this experiment, two multi-rotor plant protection UAVs were used to simulate the flow field distribution, wind field width and drift of UAVs under different working conditions. The results showed that the main wind field width of the two types of plant protection UAVs could reach 6-12 m, and the secondary wind field width could reach 12-20 m. Increasing flight altitude and speed could achieve a larger spraying area, but the wind field penetration was weakened and the distance of fog droplet drift was increased. Working in the downwind direction was beneficial for improving the spraying effect. Compared with the" six-rotor crop protection drones, the four-rotor" crop protection drones have better balance, advantages in downforce and anti drift ability and a uniform and orderly wind field distribution, which is more conducive to uniform spraying. The research results can provide ideas for the structure optimization of plant protection UAV and theoretical basis for the setting of flight control operation parameters of plant protection UAV.
Keywords:
plant protection UAV; numerical simulation; flight height; flight speed; wind speed
0 引言
隨著無(wú)人機(jī)技術(shù)的發(fā)展,植保無(wú)人機(jī)在農(nóng)業(yè)領(lǐng)域的應(yīng)用越來(lái)越廣泛[1],其靈活性好、效率高、勞動(dòng)強(qiáng)度低等展現(xiàn)出來(lái)的特點(diǎn)解決了傳統(tǒng)植保機(jī)械受作物長(zhǎng)勢(shì)和地理因素限制的問(wèn)題[2],緩解了農(nóng)村勞動(dòng)力不足的現(xiàn)狀、提高了農(nóng)藥的利用率、降低了植保作業(yè)過(guò)程中對(duì)操作人員的危害等問(wèn)題[3]。目前,我國(guó)對(duì)于植保無(wú)人機(jī)田間施藥技術(shù)的研究較少,作業(yè)參數(shù)設(shè)置隨意,缺少統(tǒng)一的標(biāo)準(zhǔn)施藥技術(shù)和作業(yè)規(guī)范。亟需科研工作者通過(guò)大量試驗(yàn)來(lái)探索符合植保無(wú)人機(jī)施藥的通用規(guī)律。
植保無(wú)人機(jī)防治農(nóng)作物有害生物的效果取決于噴霧藥液能否合理有效地沉積于靶標(biāo)[4],其影響因素有作業(yè)參數(shù)、作業(yè)環(huán)境、噴頭性能、機(jī)型以及作物類型等[5]。前人研究結(jié)果表明:植保無(wú)人機(jī)的飛行高度和速度是影響施藥效果的主要制約因素,不同的飛行高度、速度影響靶標(biāo)區(qū)域內(nèi)的霧滴沉積量、霧滴密度、霧滴粒徑[6, 7];除飛行高度和速度外,增加施藥量也可以改善施藥效果[8]。植保無(wú)人機(jī)在作業(yè)時(shí),風(fēng)速過(guò)大,霧滴飄移嚴(yán)重,霧滴不易附著在農(nóng)作物表面;風(fēng)速過(guò)小不利于霧滴沉積,適當(dāng)?shù)娘L(fēng)速可提升施藥效果,風(fēng)速在3 m/s以下時(shí)施藥效果較好[9, 10]。噴頭是植保無(wú)人機(jī)施藥系統(tǒng)的關(guān)鍵部件之一,選用霧化粒徑小的噴頭能夠改善施藥效果,但易發(fā)生飄移;選用霧化粒徑大的噴頭,能有效降低霧滴飄移,但霧滴沉積分布不均勻[11, 12]。除上述原因外,不同作物類型冠層的郁閉程度也影響著植保無(wú)人機(jī)的施藥效果[13],作物葉片重疊遮蓋嚴(yán)重,霧滴難以沉積到位于下部葉的靶標(biāo),植保無(wú)人機(jī)強(qiáng)勁有力的下壓氣流可以改變冠層的郁閉程度[14, 15],對(duì)于改善施藥效果具有積極作用。
目前,植保無(wú)人機(jī)旋翼風(fēng)場(chǎng)分布特性的檢測(cè)方法主要有田間試驗(yàn)、試驗(yàn)臺(tái)試驗(yàn)和數(shù)值模擬[16]。田間試驗(yàn)限制多、耗費(fèi)大,但結(jié)果能反映實(shí)際噴灑性能和霧滴漂移特性。試驗(yàn)臺(tái)試驗(yàn)數(shù)據(jù)可靠性高、可重復(fù)性強(qiáng),但無(wú)法模擬真實(shí)的噴灑環(huán)境。數(shù)值模擬能夠精確模擬影響植保無(wú)人機(jī)施藥效果的各種因素,現(xiàn)已成為研究植保無(wú)人機(jī)旋翼風(fēng)場(chǎng)分布規(guī)律的一種主流研究方法[17]。其中CFD數(shù)值模擬是一種利用計(jì)算機(jī)求解流體力學(xué)方程組的方法,可以有效地模擬旋翼周圍的流體運(yùn)動(dòng),捕捉渦旋流動(dòng)細(xì)節(jié),揭示旋翼繞流的特性[18]。在植保無(wú)人機(jī)領(lǐng)域,CFD仿真模擬技術(shù)主要用于機(jī)型結(jié)構(gòu)優(yōu)化、作業(yè)參數(shù)優(yōu)選等方面[1921]。本試驗(yàn)采用CFD數(shù)值模擬仿真兩款多旋翼植保無(wú)人機(jī)在不同工況下的流動(dòng)分布、風(fēng)場(chǎng)幅寬、飄移情況及無(wú)人機(jī)風(fēng)場(chǎng)和環(huán)境風(fēng)速間的相互作用;同時(shí)結(jié)合田間試驗(yàn)驗(yàn)證仿真模擬試驗(yàn)結(jié)論。可為后續(xù)多旋翼植保無(wú)人機(jī)的霧滴運(yùn)動(dòng)規(guī)律、機(jī)型結(jié)構(gòu)優(yōu)化、作業(yè)參數(shù)優(yōu)選研究提供理論基礎(chǔ)。
1 材料與方法
1.1 試驗(yàn)設(shè)備與材料
CFD仿真模擬供試機(jī)型:(1)極目EA-30X植保無(wú)人機(jī),四旋翼,裸機(jī)約32 kg,最大起飛重量為67 kg,藥箱容積為30 L、作業(yè)載荷為30 kg,噴頭數(shù)量為2個(gè),噴頭型號(hào)為CCMS-L20000,霧化粒徑為20~250 μm;(2)大疆T-30植保無(wú)人機(jī),六旋翼,裸機(jī)約26.3 kg,最大起飛重量為66.5 kg,藥箱容積為30 L、作業(yè)載荷為30 kg,噴頭數(shù)量為16個(gè),噴頭型號(hào)為SX11001VS(標(biāo)配),霧化粒徑為130~250 μm;(3)誘惑紅(指示劑);(4)風(fēng)速測(cè)量?jī)x,型號(hào)為TA8166。
1.2 模型處理
考慮到仿真需求,對(duì)兩款植保無(wú)人機(jī)進(jìn)行適當(dāng)簡(jiǎn)化,在保留各部件主要外型面的同時(shí),去除了諸如螺釘、按鍵等對(duì)整體流場(chǎng)仿真影響可以忽略的局部細(xì)節(jié),簡(jiǎn)化后四旋翼植保無(wú)人機(jī)模型如圖1所示,六旋翼植保無(wú)人機(jī)如圖2所示。
1.3 網(wǎng)格劃分
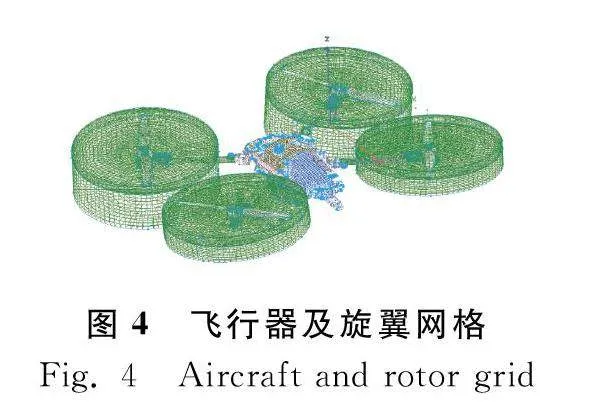
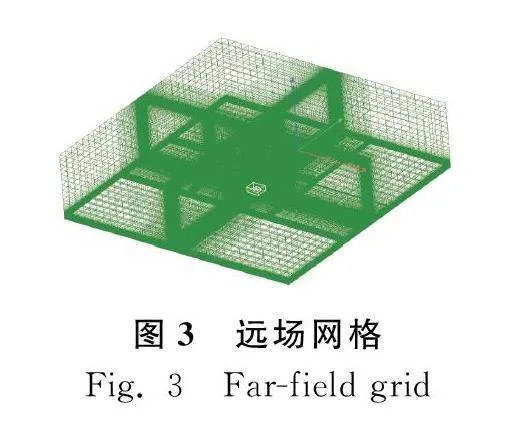
采用Cadence Point Wise進(jìn)行流體域的網(wǎng)格劃分,繪制混合網(wǎng)格。考慮到后續(xù)使用壓力遠(yuǎn)場(chǎng)邊界條件進(jìn)行仿真,建立100 m×100 m×55 m的結(jié)構(gòu)網(wǎng)格方形計(jì)算區(qū)域,飛行器中心位于(0,0,0)處,地面邊界距離飛行器支撐腿3 m/5 m距離,飛行器處網(wǎng)格加密,即空間網(wǎng)格尺度不超過(guò)10 cm,如圖3所示。針對(duì)旋翼區(qū)域進(jìn)行局部重點(diǎn)加密,即旋翼表面網(wǎng)格前后緣沿弦向第一層不大于0.5 mm,增長(zhǎng)率不大于1.2,沿展向網(wǎng)格尺度不大于5 mm,其他地方網(wǎng)格尺度不超過(guò)1 cm。由于需要考慮旋翼的旋轉(zhuǎn),旋翼區(qū)域采用滑移網(wǎng)格,繪制了單獨(dú)的旋轉(zhuǎn)區(qū)域,其他區(qū)域采用靜態(tài)網(wǎng)格。為精確捕捉附面層流動(dòng),繪制30層附面層網(wǎng)格,第一層網(wǎng)格厚度0.5 mm,旋翼第一層網(wǎng)格厚度0.2 mm,總網(wǎng)格量約1 000萬(wàn),如圖4所示。
1.4 計(jì)算設(shè)置
由于有旋翼存在,在2 800 r/min轉(zhuǎn)速下,旋翼尖端速度約146 m/s,馬赫數(shù)約0.43,此時(shí)空氣的壓縮性不可忽視,因此采用ANSYS CFX密度基求解器,使用可壓縮流體模型進(jìn)行仿真,空氣使用理想氣體模型,湍流模型使用適合旋翼仿真的k-ω SST模型;N-S方程由連續(xù)性方程、動(dòng)量方程和能量方程組成。
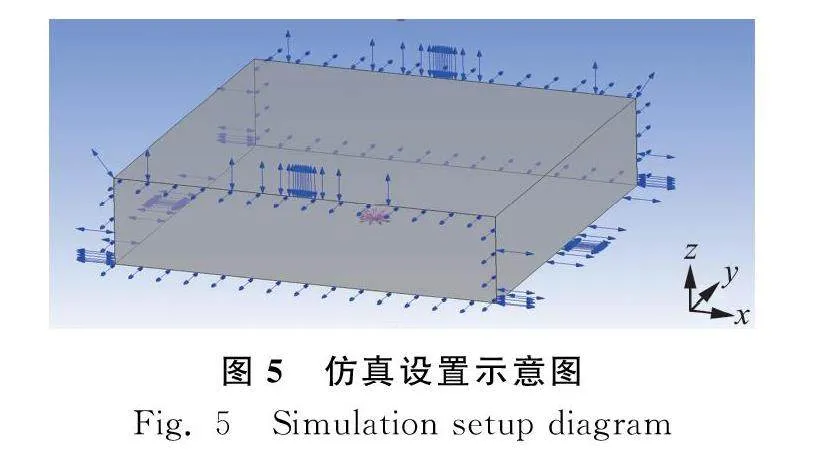
仿真大氣環(huán)境按靜壓101 325 Pa,靜溫300 K設(shè)置,壁面使用絕熱壁面。初始條件采用均勻自由流條件,X軸正向?yàn)轱w行器飛行方向,Z軸從地面指向天空。有風(fēng)時(shí),風(fēng)沿X軸正向向前吹,即飛行器順風(fēng)飛行。地面采用滑移粗糙壁面,相對(duì)飛行器以飛行速度向X軸負(fù)向運(yùn)動(dòng)。旋翼使用滑移網(wǎng)格,設(shè)置其按照指定的轉(zhuǎn)速、旋轉(zhuǎn)方向繞軸旋轉(zhuǎn),如圖5所示。
1.5 噴灑介質(zhì)及模擬分析內(nèi)容
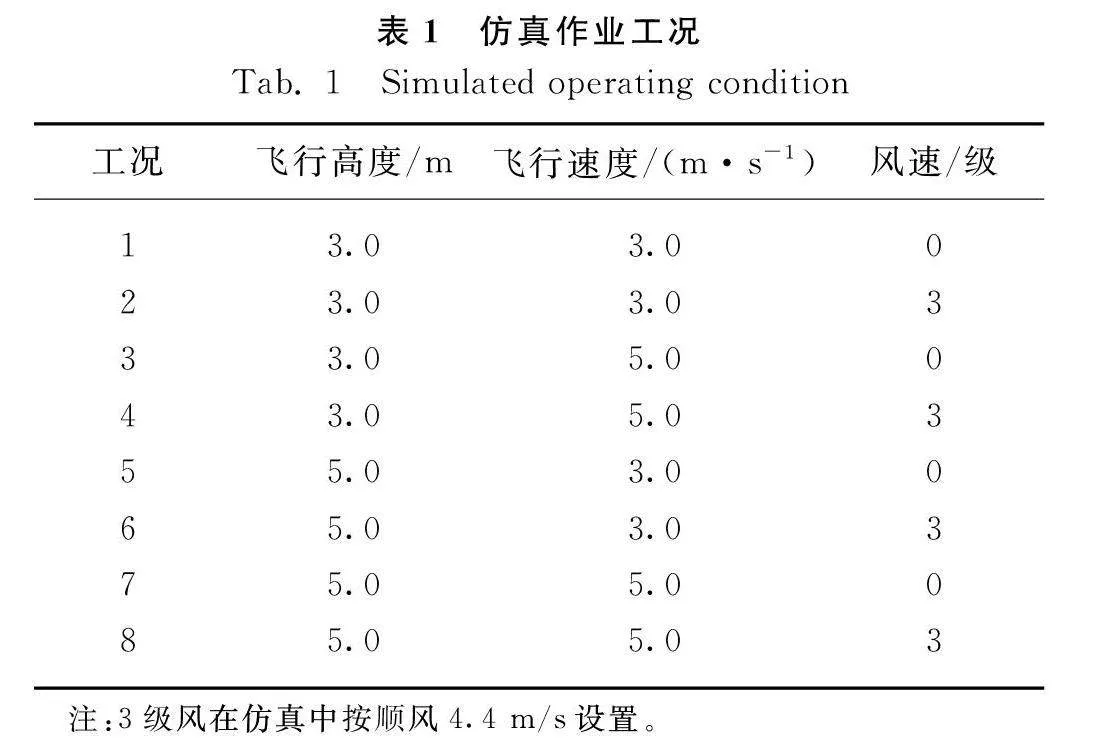
本試驗(yàn)噴灑介質(zhì)為水,四旋翼植保無(wú)人機(jī)每個(gè)噴頭噴灑流量設(shè)為0.084 kg/s,共計(jì)2個(gè)噴頭總噴灑流量為0.168 kg/s,六旋翼植保無(wú)人機(jī)每個(gè)噴頭噴灑流量設(shè)為0.010 kg/s,共計(jì)16個(gè)噴頭總噴灑流量為0.160 kg/s。根據(jù)植保無(wú)人機(jī)在田間作業(yè)時(shí),常設(shè)置的飛行高度、飛行速度范圍及探索環(huán)境風(fēng)速對(duì)植保無(wú)人機(jī)施藥效果的影響,設(shè)置如表1所示的工況模擬參數(shù)。對(duì)所模擬的工況分析進(jìn)行中的氣流及風(fēng)場(chǎng)、植保無(wú)人機(jī)風(fēng)場(chǎng)及外部環(huán)境風(fēng)速的相互影響以及云圖、流場(chǎng)、分布曲線模擬數(shù)據(jù)分析。
1.6 田間施藥效果驗(yàn)證
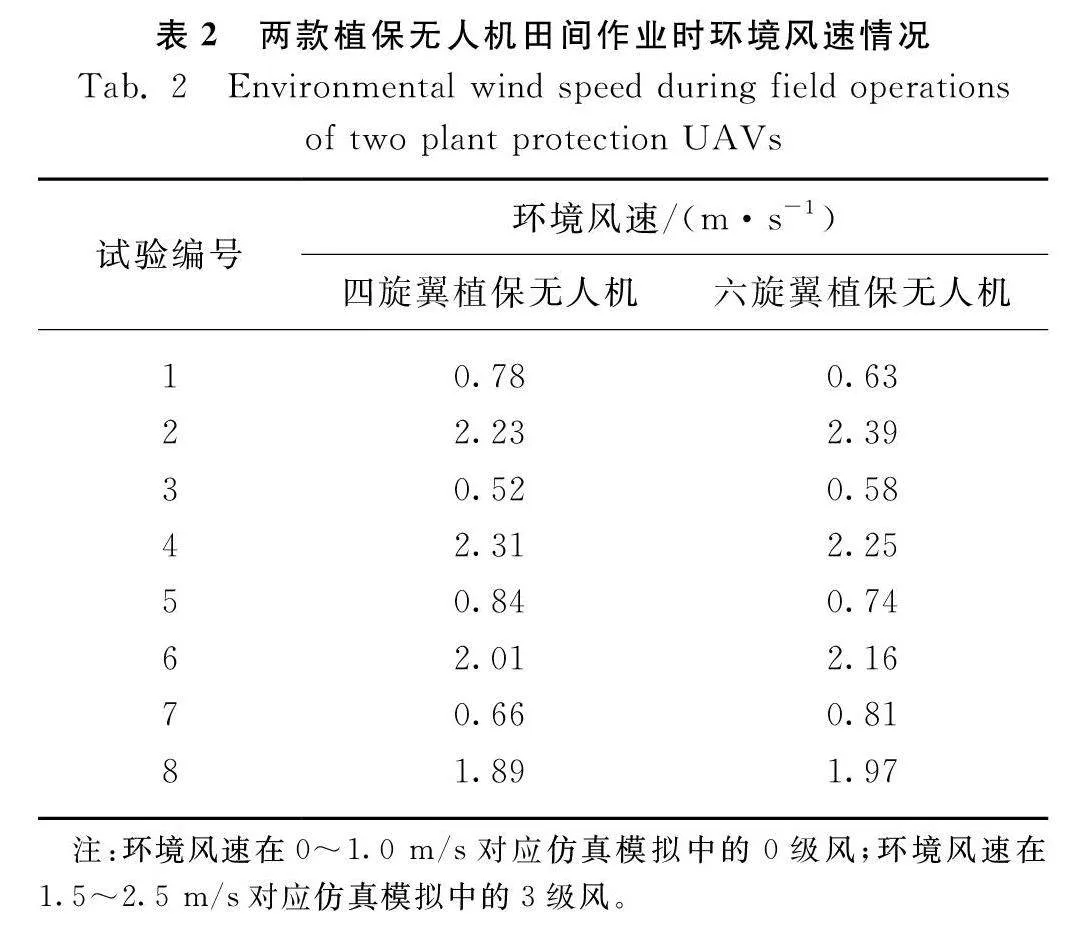
田間試驗(yàn)作業(yè)對(duì)象為煙草,于2023年5—8月在貴州省福泉煙草科學(xué)研究所基地(E26°74′,N107°50′)進(jìn)行,供試烤煙品種K326,種植間距為1.0 m×0.6 m。試驗(yàn)時(shí),選擇氣溫在20 ℃~32 ℃、相對(duì)濕度在40%~90%,煙株平均高度為30 cm。作業(yè)參數(shù)設(shè)置如表1所示,但風(fēng)速由于在田間難以精確控制,只驗(yàn)證在0~1.0 m/s和1.5~2.5 m/s兩個(gè)區(qū)間風(fēng)速的施藥效果區(qū)別,如表2所示。
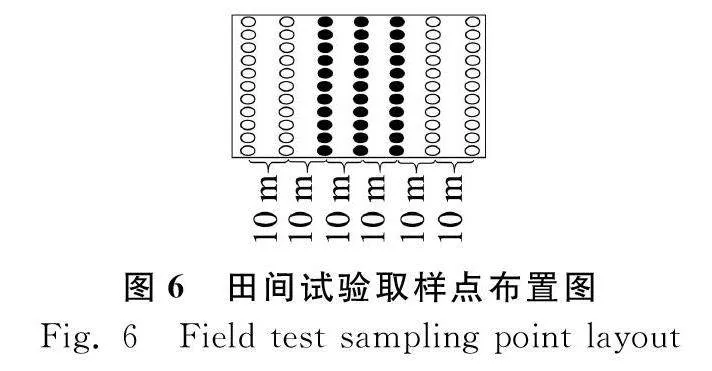
選擇長(zhǎng)×寬為60.0 m×20.0 m的試驗(yàn)小區(qū),在試驗(yàn)小區(qū)內(nèi)每隔10 m選1行煙株作為取樣煙株,共3行,每行選11株煙作為取樣點(diǎn),共計(jì)3個(gè)重復(fù)33個(gè)取樣點(diǎn),圖中黑色圓圈為取樣煙株(圖6),植保無(wú)人機(jī)飛行方向?yàn)閺淖蟮接彝岛叫校?個(gè)航次。在取樣點(diǎn)煙株葉基到葉尖1/2處布置一張霧滴測(cè)試卡(由相片紙裁剪而成,長(zhǎng)×寬:7.0 cm×3.0 cm)。用誘惑紅兌水(5 g/L)作為指示劑加入植保無(wú)人機(jī),在每次試驗(yàn)之前,用手持風(fēng)速儀測(cè)量風(fēng)速,風(fēng)速滿足條件則起飛作業(yè)。植保無(wú)人機(jī)作業(yè)完成后,按序收集霧滴測(cè)試卡,逐一放入密封袋,并做好標(biāo)記,霧滴測(cè)試卡按順序擺放在掃描儀上,選擇灰度掃描,在600 dpi下掃描并保存圖片。使用DepositScan得到霧滴密度、霧滴覆蓋率、霧滴粒徑、霧滴沉積量。采用變異系數(shù)對(duì)各個(gè)采樣點(diǎn)之間霧滴均勻性進(jìn)行評(píng)估,變異系數(shù)越小說(shuō)明霧滴沉積分布均勻性越好。變異系數(shù)計(jì)算如式(1)所示。
CV=σμ
(1)
式中:
CV——變異系數(shù);
σ——取樣點(diǎn)霧滴密度標(biāo)準(zhǔn)差;
μ——取樣點(diǎn)霧滴密度平均值。
2 結(jié)果與分析
2.1 兩款植保無(wú)人機(jī)在不同工況下下壓氣流分析
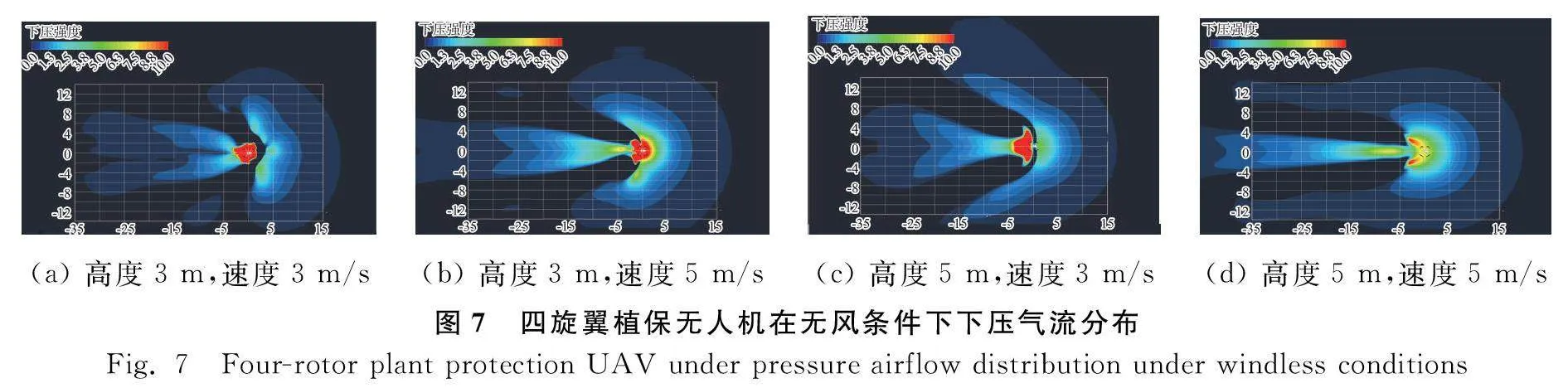
由圖7~圖10可知,在絕大多數(shù)工況下,兩款植保無(wú)人機(jī)均能提供強(qiáng)勁有力的下壓氣流,利于噴灑霧滴穿透植被,提高植保無(wú)人機(jī)對(duì)作物中、下部葉的施藥效果。
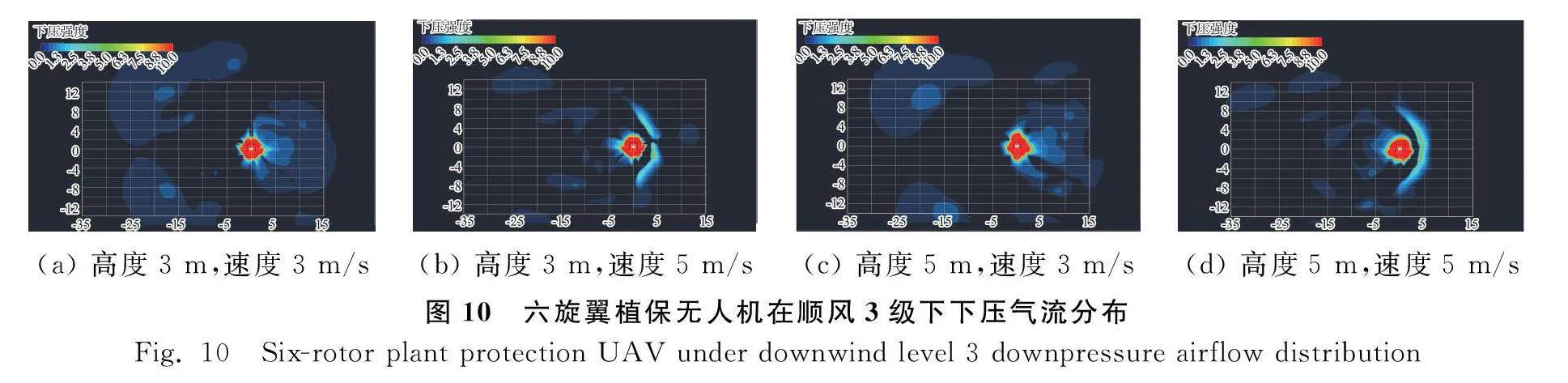
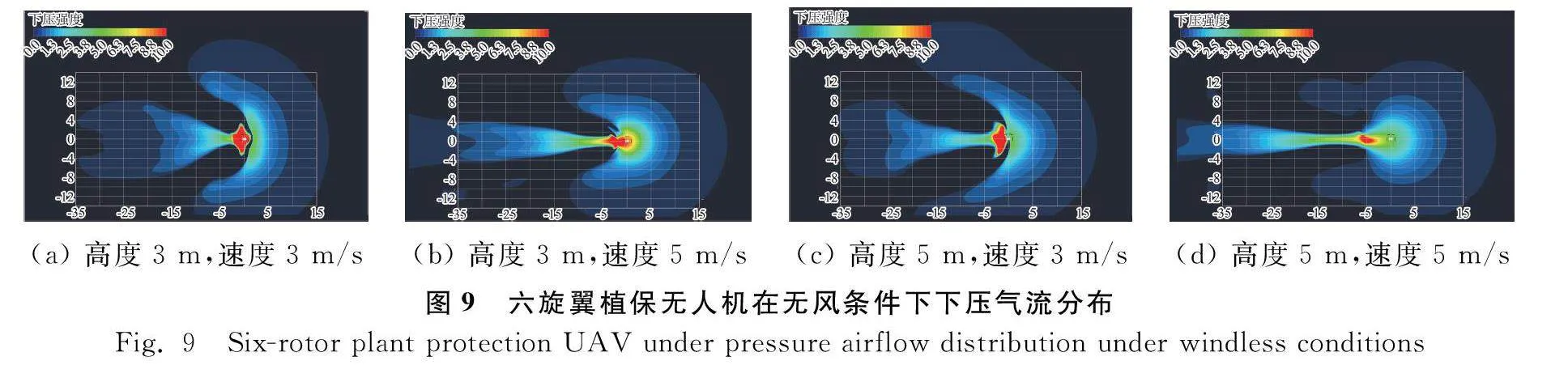
由圖7(d)和圖9(d)可知,在飛行高度5 m、飛行速度5 m/s、無(wú)風(fēng)工況下,由于飛行高度和飛行速度均比較大,導(dǎo)致植保無(wú)人機(jī)正下方的下壓力較小,對(duì)于葉片郁閉程度嚴(yán)重的作物施藥效果不佳。同時(shí)由圖7、圖9可知,兩款植保無(wú)人機(jī)在無(wú)風(fēng)狀態(tài)下,植保無(wú)人機(jī)飛行時(shí),環(huán)境風(fēng)速相對(duì)植保無(wú)人機(jī)向后運(yùn)動(dòng),受植保無(wú)人機(jī)風(fēng)場(chǎng)阻擋,在植保無(wú)人機(jī)前方形成一個(gè)弓形的下壓區(qū)域,不過(guò)該區(qū)域?qū)姙⒉](méi)有什么幫助。由圖8、圖10可知,在順風(fēng)飛行的情況下,植保無(wú)人機(jī)正下方有很強(qiáng)的下壓力,尤其在較高飛行高度和較快飛行速度飛行時(shí)區(qū)別十分明顯。
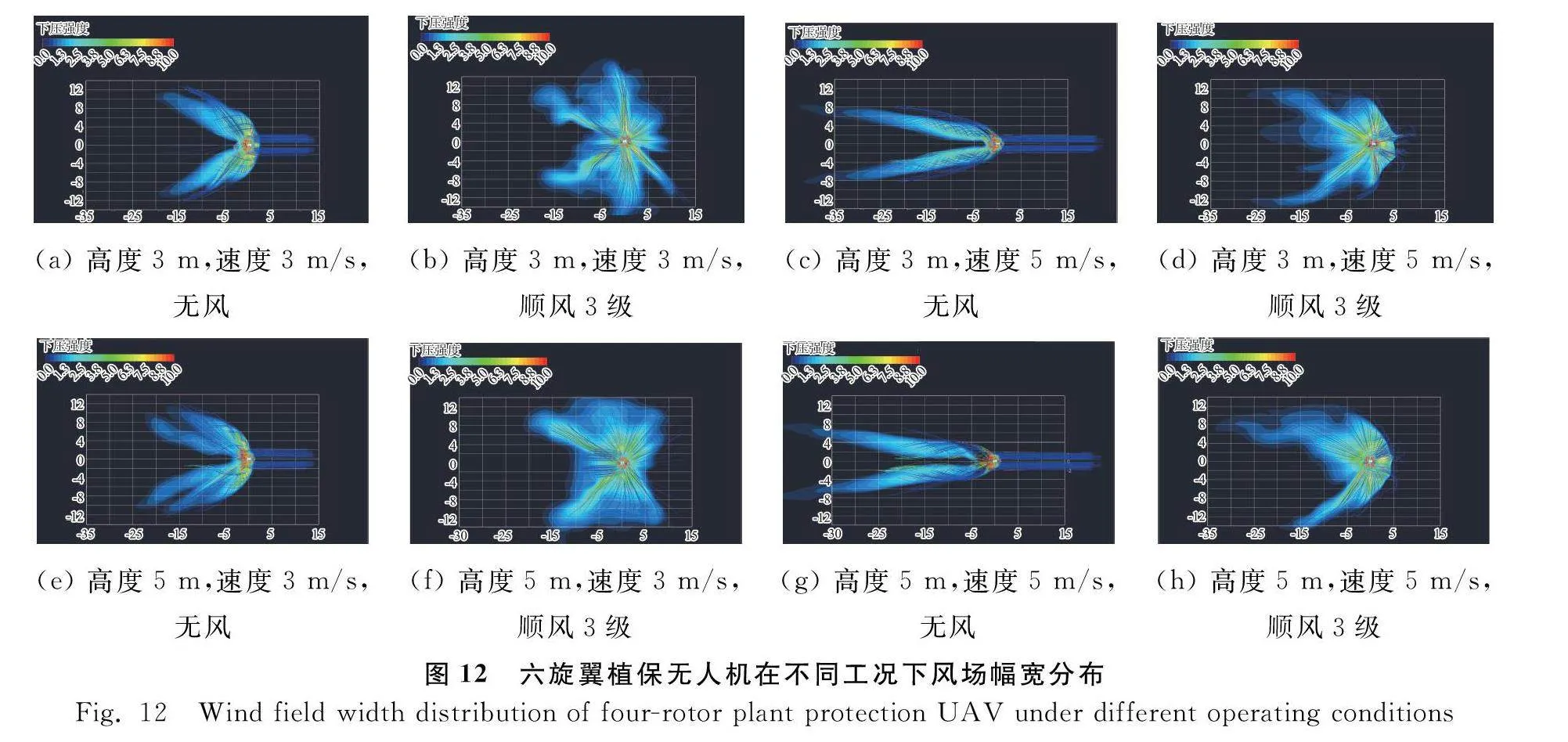
2.2 兩款植保無(wú)人機(jī)在不同工況下風(fēng)場(chǎng)幅寬分析
植保無(wú)人機(jī)在田間作業(yè)時(shí)的有效噴幅跟植保無(wú)人機(jī)的風(fēng)場(chǎng)幅寬有直接關(guān)系,在一定程度上影響著植保無(wú)人機(jī)的施藥效果。將下壓強(qiáng)度大于6.9視為主要風(fēng)場(chǎng),下壓強(qiáng)度介于3.1~6.9視為次要風(fēng)場(chǎng)。由圖11、圖12可知,兩款植保無(wú)人機(jī)主要風(fēng)場(chǎng)幅寬可達(dá)6~12 m,次要風(fēng)場(chǎng)幅寬可達(dá)12~20 m。由圖11(h)、圖12(h)可知,在飛行高度5 m、飛行速度5 m/s、無(wú)風(fēng)條件下風(fēng)場(chǎng)幅寬最窄,即在無(wú)風(fēng)條件下,設(shè)置較高的飛行高度和較快的飛行速度會(huì)導(dǎo)致施藥效果不佳。對(duì)比圖11、圖12可知,四旋翼植保無(wú)人機(jī)風(fēng)場(chǎng)分布比六旋翼植保無(wú)人機(jī)均勻規(guī)整,更有利于噴灑均勻。同時(shí),兩款植保無(wú)人機(jī)順風(fēng)飛行時(shí),增大了風(fēng)場(chǎng)幅寬;隨著飛行速度的增加,風(fēng)場(chǎng)幅寬變小;隨著飛行高度的增加,風(fēng)場(chǎng)幅寬變大,但相同強(qiáng)度下的影響幅寬不如飛行高度為3 m的,即隨著飛行高度增加,能夠噴灑的面積更大,但是穿透力減弱。
2.3 兩款植保無(wú)人機(jī)在不同工況下噴灑效果分析
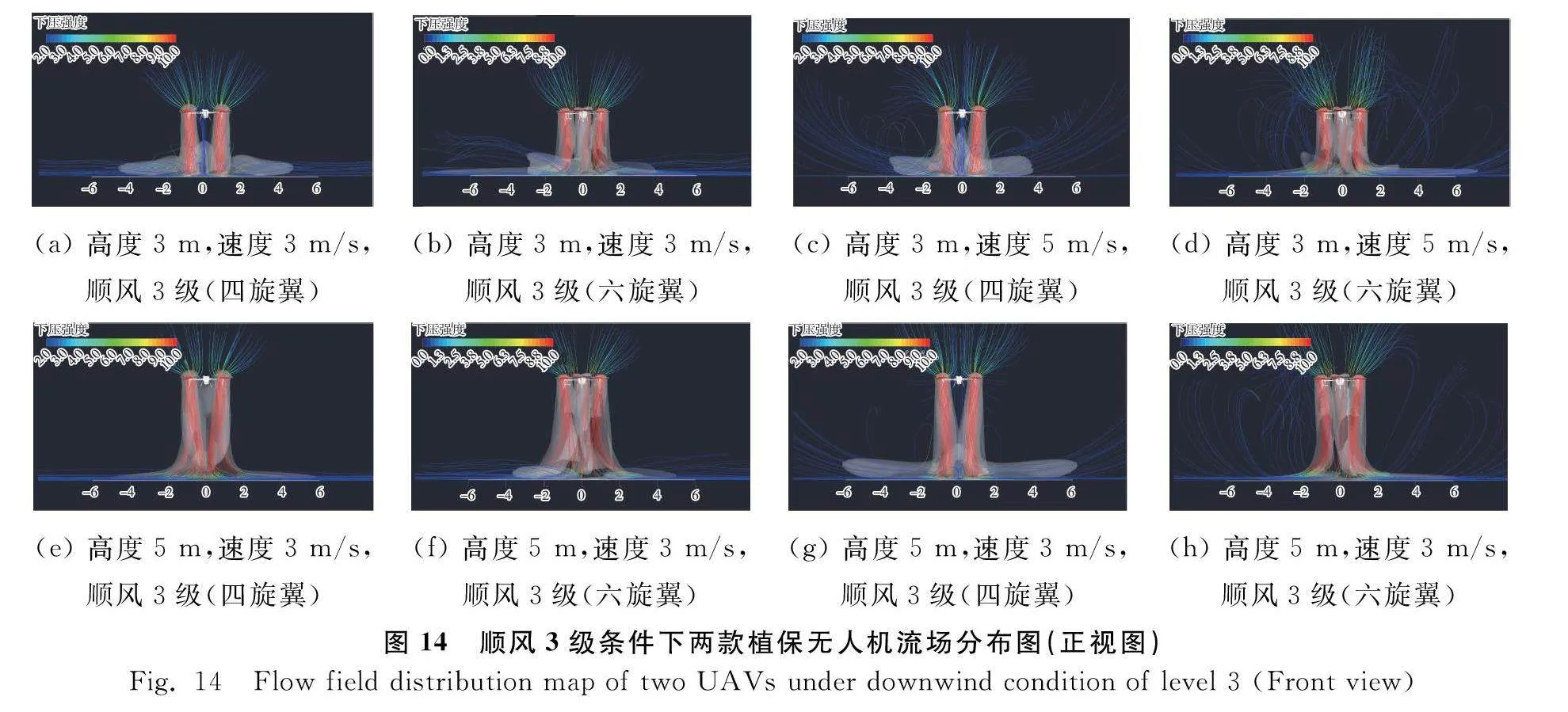
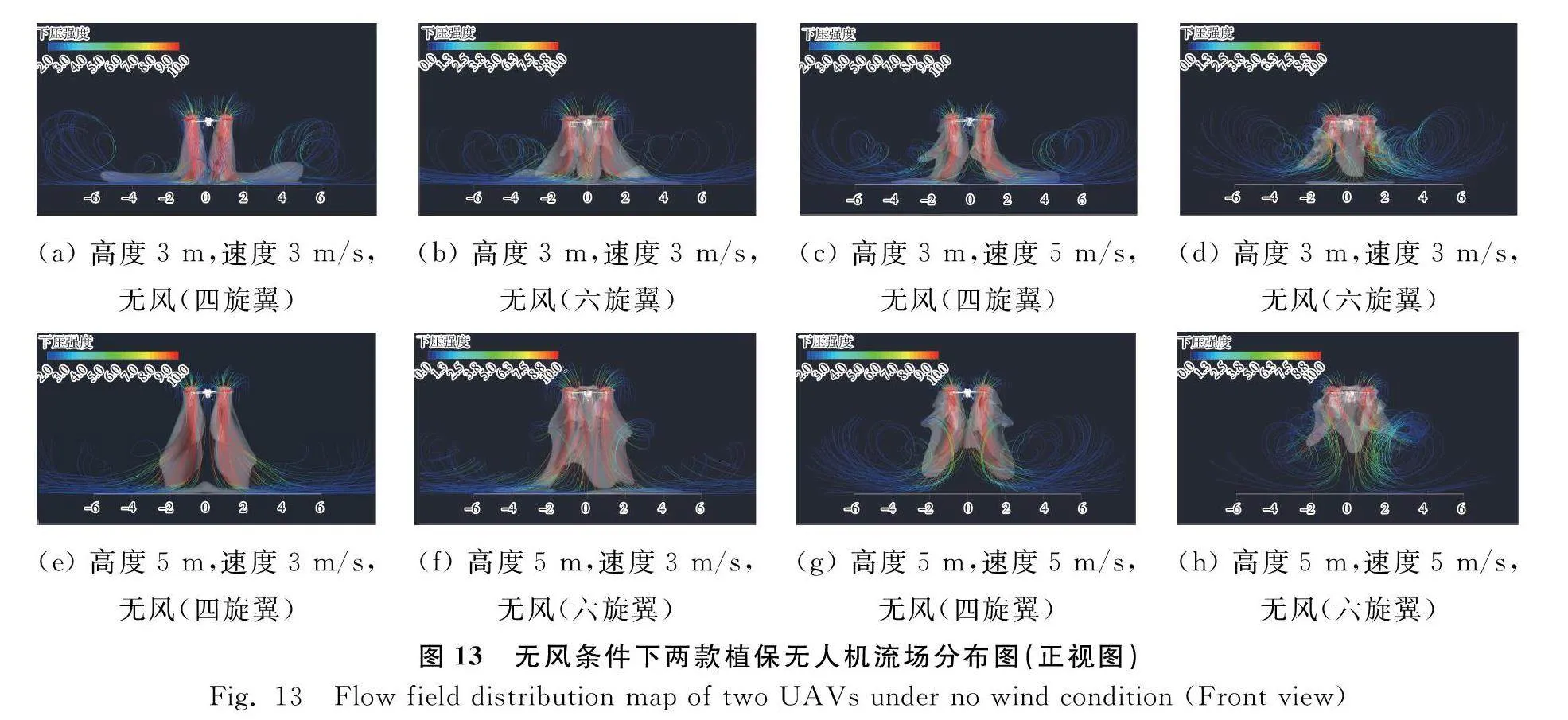
由圖13可知,無(wú)風(fēng)狀態(tài)下,由于環(huán)境風(fēng)速和飛行速度兩者間差值較大,隨著飛行高度和飛行速度的增加,兩款植保無(wú)人機(jī)風(fēng)場(chǎng)強(qiáng)度衰減較為明顯;同時(shí)四旋翼植保無(wú)人機(jī)下壓風(fēng)場(chǎng)的衰減程度比六旋翼植保無(wú)人機(jī)的弱,這得益于四旋翼植保無(wú)人機(jī)對(duì)稱性更強(qiáng)、平衡性更好、單槳風(fēng)場(chǎng)更強(qiáng)。由圖14可知,在順風(fēng)3級(jí)時(shí),由于環(huán)境風(fēng)速和飛行速度兩者間差值較小,兩款植保無(wú)人機(jī)的下壓風(fēng)場(chǎng)得到加強(qiáng),因此在現(xiàn)實(shí)的植保作業(yè)過(guò)程中,植保無(wú)人機(jī)應(yīng)順風(fēng)作業(yè)以提高施藥效果。
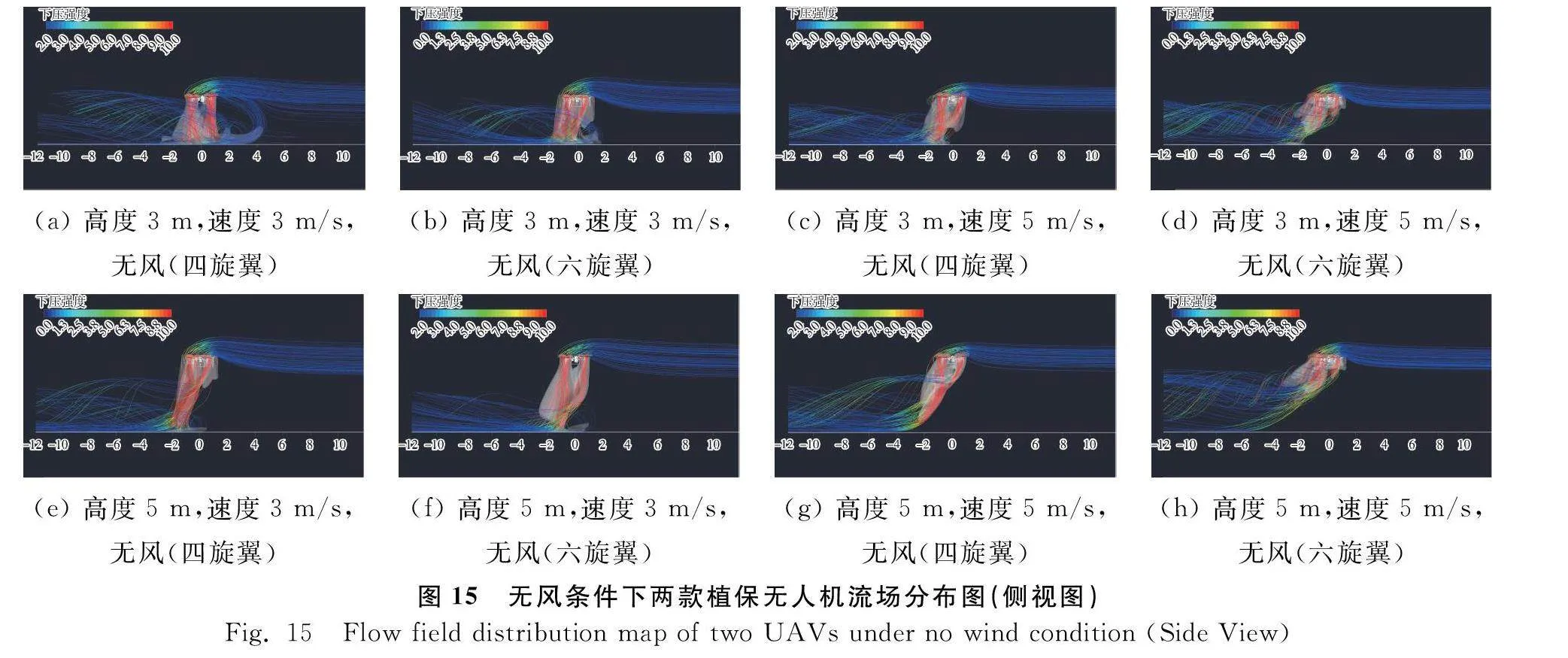
霧滴飄移是影響植保無(wú)人機(jī)施藥效果的主要因素之一,本試驗(yàn)從植保無(wú)人機(jī)流場(chǎng)分布的偏移距離來(lái)衡量霧滴飄移情況。由圖15可知,在無(wú)風(fēng)作業(yè)時(shí),環(huán)境風(fēng)速和飛行速度差值較大,兩款植保無(wú)人機(jī)除在飛行高度3 m、飛行速度3 m/s時(shí)飄移距離不明顯外,在其余工況下,均發(fā)生較為明顯的霧滴飄移,噴灑效果變差;且隨著飛行高度和飛行速度的增加,霧滴飄移距離越加嚴(yán)重,六旋翼植保無(wú)人機(jī)的霧滴飄移距離比四旋翼植保無(wú)人機(jī)更遠(yuǎn)。
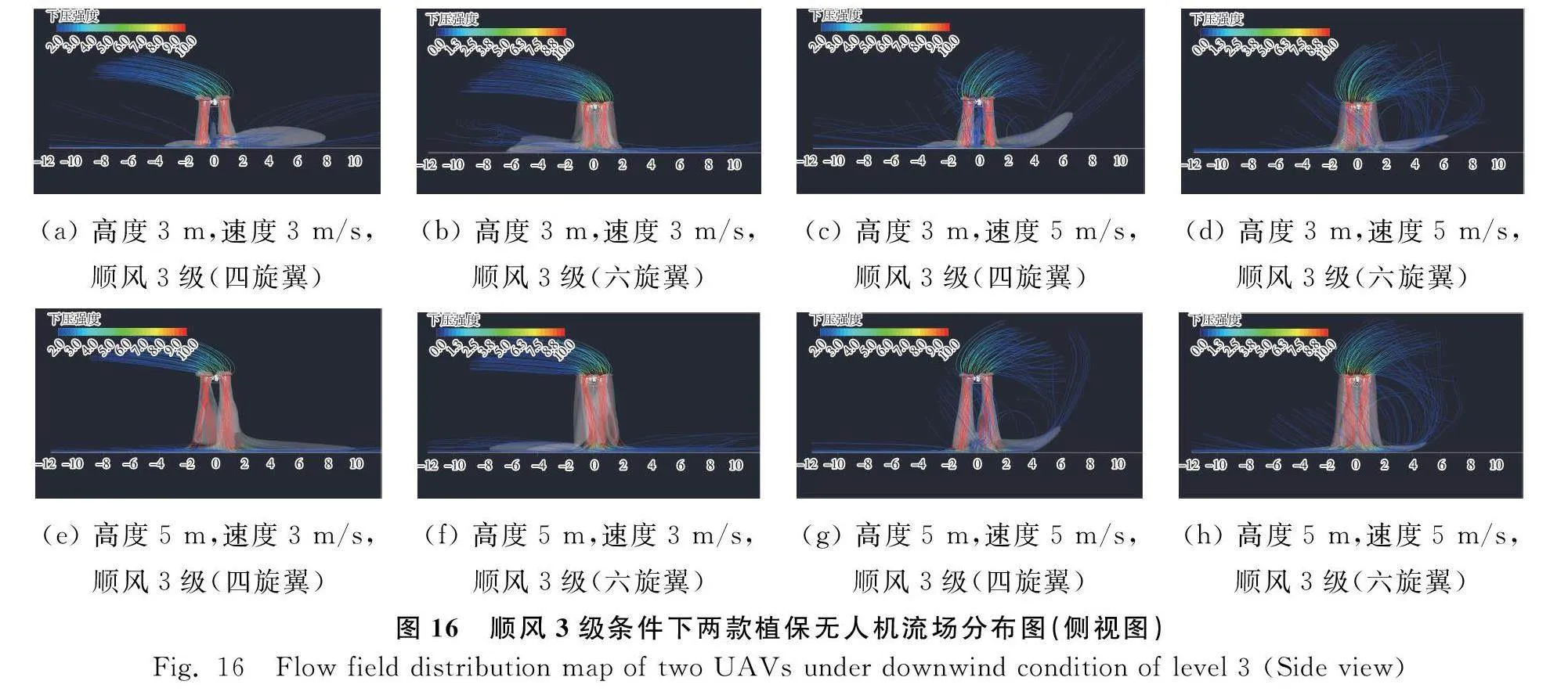
由圖16可知,在順風(fēng)3級(jí)作業(yè)時(shí),由于環(huán)境風(fēng)速和飛行速度差值小,兩款植保無(wú)人機(jī)在順風(fēng)作業(yè)時(shí)飄移距離無(wú)明顯差異,且順風(fēng)作業(yè)可以有效縮短霧滴飄移距離。
2.4 兩款植保無(wú)人機(jī)在不同工況下地面壓力曲線和速度曲線對(duì)比分析
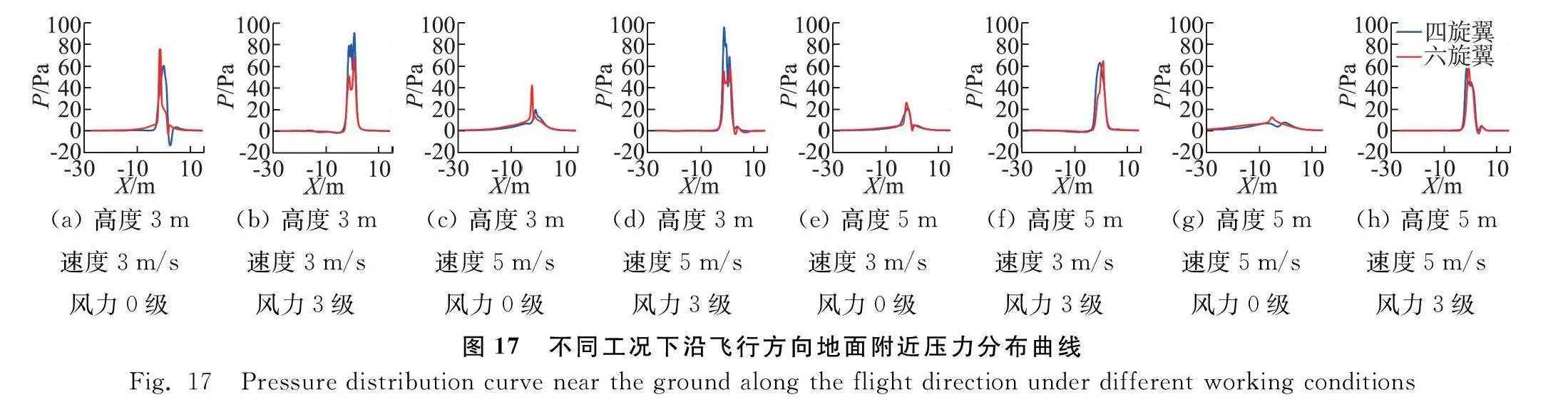
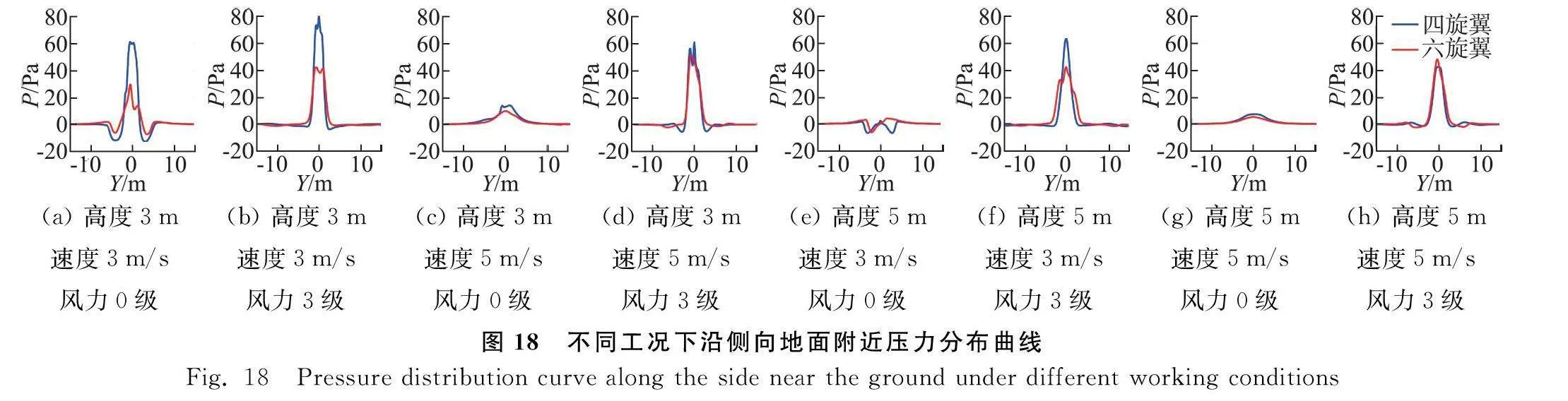
通過(guò)地面壓力曲線的對(duì)比,可以知道兩款植保無(wú)人機(jī)正下方風(fēng)場(chǎng)對(duì)作物的穿透力。由圖17可知,從對(duì)沿飛行方向地面壓力來(lái)看,在飛行高度為3 m時(shí),順風(fēng)飛行四旋翼植保無(wú)人機(jī)更有優(yōu)勢(shì),無(wú)風(fēng)飛行六旋翼植保無(wú)人機(jī)更有優(yōu)勢(shì);在飛行高度為5 m時(shí),兩款植保無(wú)人機(jī)無(wú)明顯差異。由圖18可知,從對(duì)沿側(cè)向地面壓力來(lái)看,在飛行高度為3 m時(shí),四旋翼植保無(wú)人機(jī)優(yōu)勢(shì)明顯;在飛行高度為5 m時(shí),四旋翼植保無(wú)人機(jī)在順風(fēng)3級(jí)、飛行速度3 m/s工況下優(yōu)勢(shì)明顯,其余工況下,兩款植保無(wú)人機(jī)無(wú)明顯差異。
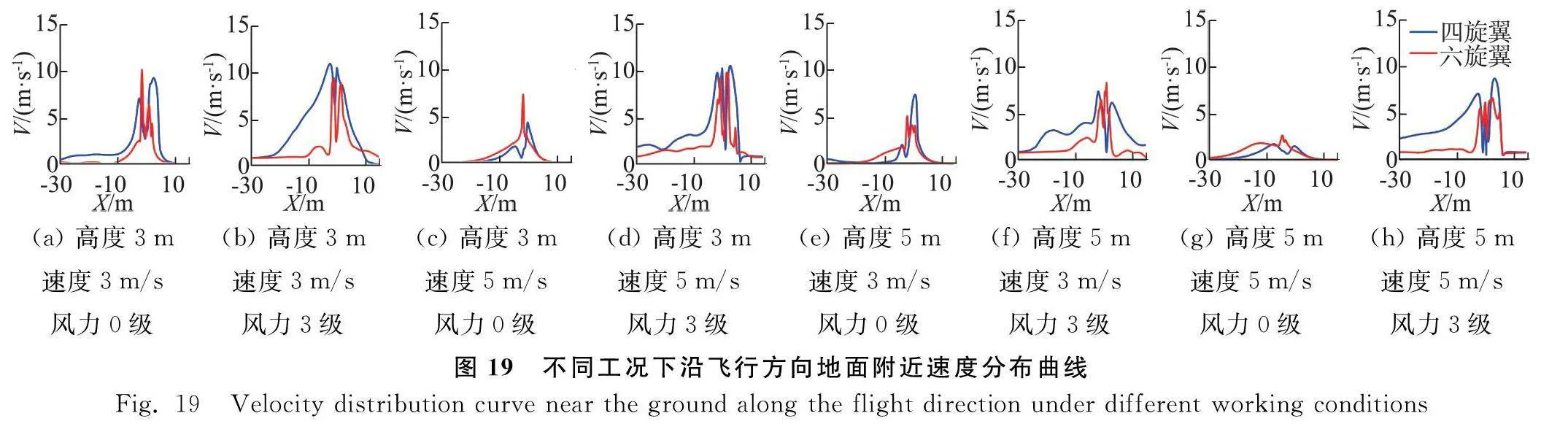
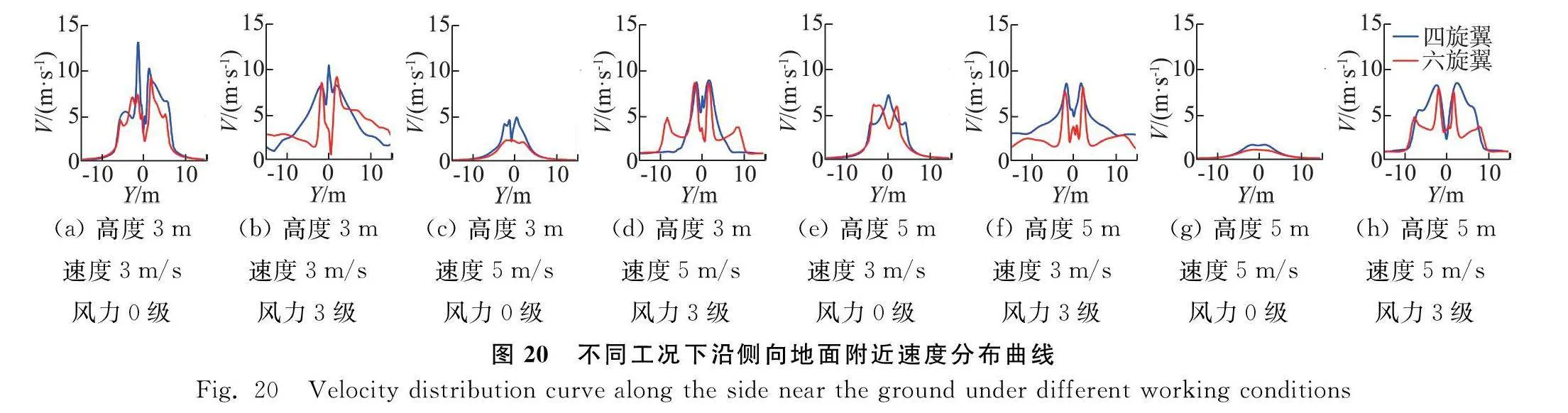
通過(guò)速度曲線的對(duì)比,可以知道兩款植保無(wú)人機(jī)穿透力覆蓋范圍,即速度大且分布均勻意味著對(duì)比較寬闊的區(qū)域有較強(qiáng)的穿透力。
由圖19和圖20可知,從沿飛行方向和側(cè)向速度分布曲線來(lái)看,四旋翼植保無(wú)人機(jī)的風(fēng)場(chǎng)相對(duì)于六旋翼植保無(wú)人機(jī)更大更強(qiáng),穿透力優(yōu)勢(shì)十分明顯。此方面的優(yōu)勢(shì)可能源于四旋翼植保無(wú)人機(jī)采用4槳而非6槳構(gòu)型,結(jié)構(gòu)更加對(duì)稱,單槳風(fēng)場(chǎng)更強(qiáng),衰減更慢;另一方面,六旋翼植保無(wú)人機(jī)安裝16個(gè)噴頭,單個(gè)噴頭噴灑流量小,衰減更快。
2.5 兩款植保無(wú)人機(jī)田間作業(yè)施藥效果對(duì)比
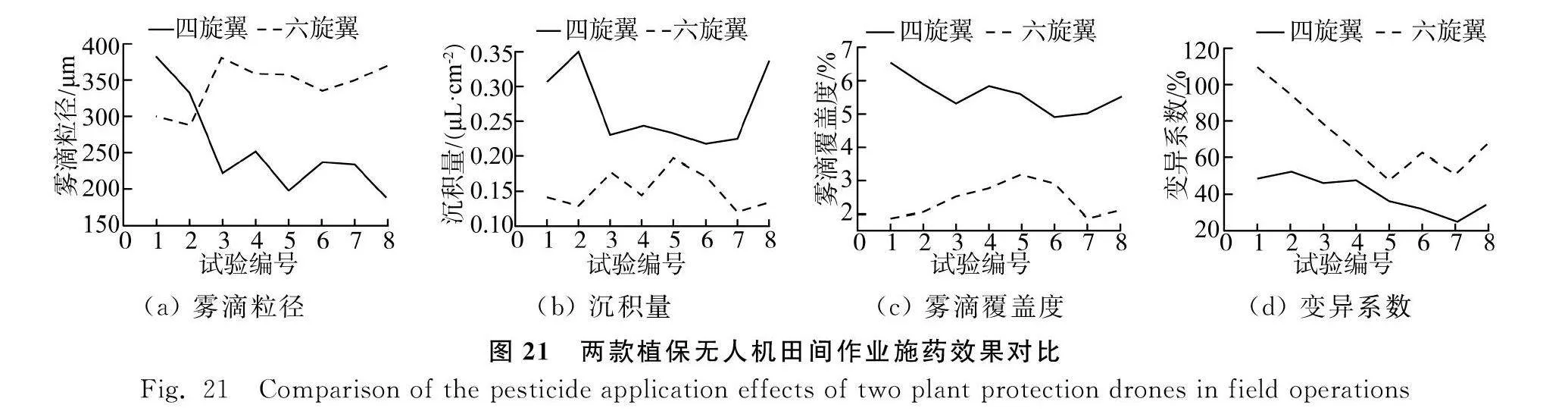
由圖21(a)可知,四旋翼植保無(wú)人機(jī)的霧滴粒徑在飛行高度3 m、飛行速度3 m時(shí),四旋翼植保無(wú)人機(jī)霧滴粒徑大,其余飛行參數(shù)下均是六旋翼植保無(wú)人機(jī)霧滴粒徑大,這可能是兩款植保無(wú)人機(jī)噴頭類型不同導(dǎo)致,同時(shí)霧滴粒徑大可能也是六旋翼植保無(wú)人機(jī)霧滴均勻性差的原因之一。使用植保無(wú)人機(jī)進(jìn)行葉面噴施時(shí),霧滴粒徑在10~300 μm之間有較好的施藥效果,從這方面來(lái)看,四旋翼植保無(wú)人機(jī)的施藥效果更好。由圖21(b)、圖21(c)來(lái)看,四旋翼植保無(wú)人機(jī)的沉積量、霧滴覆蓋度在各個(gè)作業(yè)參數(shù)下均大于六旋翼植保無(wú)人機(jī),即在同等作業(yè)參數(shù)下四旋翼植保無(wú)人機(jī)的施藥效果更好,且四旋翼植保無(wú)人機(jī)在飛行高度3 m、飛行速度3 m/s時(shí)的施藥效果最優(yōu)。由圖21(d)可知,四旋翼植保無(wú)人機(jī)的變異系數(shù)在同等作業(yè)參數(shù)下均小于六旋翼植保無(wú)人機(jī),即四旋翼植保無(wú)人機(jī)的噴灑均勻性更好,防治效果優(yōu)于六旋翼植保無(wú)人機(jī)。綜上所述,田間驗(yàn)證結(jié)果基本跟CFD仿真結(jié)果吻合;但環(huán)境風(fēng)速的改變帶來(lái)的施藥效果變化不明顯,對(duì)施藥效果的改變有升有降。這可能是在田間作業(yè)時(shí),環(huán)境風(fēng)場(chǎng)紊亂,作業(yè)過(guò)程中風(fēng)向變化,并未完全順風(fēng)作業(yè)導(dǎo)致的。
3 討論
目前,在我國(guó)市場(chǎng)上多旋翼植保無(wú)人機(jī)運(yùn)用最為廣泛[22, 23]。對(duì)于多旋翼植保無(wú)人機(jī)的田間施藥技術(shù),前人研究多著重于某一機(jī)型飛行高度、飛行速度和施藥量對(duì)某一作物的施藥效果影響,得到的結(jié)果不具備通用性。在本試驗(yàn)中,仿真結(jié)果和田間試驗(yàn)結(jié)果均表明:四旋翼植保無(wú)人機(jī)霧滴分布更加均勻,更有利于均勻噴灑,施藥效果更好。導(dǎo)致此結(jié)果的原因可能是四旋翼植保無(wú)人機(jī)的結(jié)構(gòu)設(shè)計(jì)平衡性更好,單槳風(fēng)場(chǎng)更強(qiáng),衰減更慢;而六旋翼植保無(wú)人機(jī),采用六槳構(gòu)型設(shè)計(jì),植保無(wú)人機(jī)風(fēng)場(chǎng)向后嚴(yán)重拖曳,高度旋轉(zhuǎn)的槳葉滑流和外界風(fēng)場(chǎng)相互作用,導(dǎo)致植保無(wú)人機(jī)風(fēng)場(chǎng)向一側(cè)偏移,噴施不均勻。故而在后續(xù)的植保無(wú)人機(jī)機(jī)型結(jié)構(gòu)設(shè)計(jì)中,應(yīng)考慮安裝旋翼的數(shù)量及安裝位置對(duì)植保無(wú)人機(jī)平衡性的影響。
單從兩款植保無(wú)人機(jī)的CFD模擬結(jié)果來(lái)看,在無(wú)風(fēng)條件下,降低飛行高度和飛行速度可以提高霧滴的穿透能力和風(fēng)場(chǎng)強(qiáng)度,改善施藥效果,此結(jié)論跟田間試驗(yàn)結(jié)論吻合;提高飛行高度和飛行速度可以獲得更多的噴灑面積和提高作業(yè)效率,但飄移距離增加,此結(jié)論與其他科研工作者的田間試驗(yàn)結(jié)果相吻合[8, 24, 25]。即從理論上來(lái)說(shuō),植保無(wú)人機(jī)在無(wú)風(fēng)條件作業(yè)時(shí),選擇較低的飛行高度和飛行速度可以有更強(qiáng)的霧滴穿透力,此規(guī)律適合大多數(shù)作物利用植保無(wú)人機(jī)進(jìn)行植保作業(yè);但過(guò)低的飛行高度并不適合葉片易折損且以葉片作為收獲部位的農(nóng)作物,如煙草等作物。在順風(fēng)3級(jí)作業(yè)時(shí),在較高飛行速度下的施藥效果得到改善,即植保無(wú)人機(jī)的飛行速度跟環(huán)境風(fēng)速的差值越小作業(yè)效果越好。由以上規(guī)律可知,在田間作業(yè)時(shí),植保無(wú)人機(jī)對(duì)作業(yè)對(duì)象的損害較小且在環(huán)境風(fēng)速很小的情況下,應(yīng)盡量選擇較低的飛行高度和飛行速度;同時(shí)應(yīng)順風(fēng)飛行,且飛行速度跟環(huán)境風(fēng)速差值越小施藥效果越好。利用植保無(wú)人機(jī)進(jìn)行植保作業(yè)會(huì)是未來(lái)的主流作業(yè)方式,但現(xiàn)今植保無(wú)人機(jī)種類多樣、作業(yè)作物繁多及作業(yè)情況復(fù)雜,未來(lái)的研究應(yīng)針對(duì)市場(chǎng)上的主流機(jī)型在不同作物、不同環(huán)境條件下霧滴運(yùn)動(dòng)規(guī)律,建立相應(yīng)的植保無(wú)人機(jī)施藥作業(yè)指南[26]。這可以讓飛手或農(nóng)戶在利用植保無(wú)人機(jī)作業(yè)時(shí),能夠根據(jù)植保無(wú)人機(jī)機(jī)型、作物類型、環(huán)境條件設(shè)置相應(yīng)的作業(yè)參數(shù),以提高作業(yè)效果。
4 結(jié)論
1) 兩款植保無(wú)人機(jī)在順風(fēng)飛行下,可以增大風(fēng)場(chǎng)幅寬、改善霧滴均勻性,從而提升施藥效果。
2) 降低飛行高度和飛行速度噴灑效果更好,提升飛行高度、速度可以獲得較大的噴灑面積,但是風(fēng)場(chǎng)穿透力減弱,飄移距離增加。
3) 四旋翼植保無(wú)人機(jī)相較于六旋翼植保無(wú)人機(jī)平衡性更好,下壓力以及抗飄移能力都有一定優(yōu)勢(shì),且風(fēng)場(chǎng)分布均勻規(guī)整,更有利于噴灑均勻。
參 考 文 獻(xiàn)
[1]Zhu Lihua, Xu Zhijian, Wang Yu, et al. Correlation analysis of energy consumption of agricultural rotorcraft [J]. Computers, Materials Continua, 2022, 71(2): 3179-3192.
[2]張遵文. 植保無(wú)人機(jī)山地作業(yè)航線控制優(yōu)化研究[D]. 杭州: 杭州電子科技大學(xué), 2021.
Zhang Zunwen. Research on optimizing route control of plant protection UAV mountain operation [D]. Hangzhou: Hangzhou Dianzi University, 2021.
[3]何雄奎. 高效植保機(jī)械與精準(zhǔn)施藥技術(shù)進(jìn)展[J]. 植物保護(hù)學(xué)報(bào), 2022, 49(1): 389-397.
He Xiongkui. Research and development of efficient plant protection equipment and precision spraying technology in China: A review [J]. Journal of Plant Protection, 2022, 49(1): 389-397.
[4]高軍, 李興釗, 吳春娟, 等. 多旋翼植保無(wú)人機(jī)在小麥不同生育期飛防飛行參數(shù)優(yōu)選初探[J]. 中國(guó)植保導(dǎo)刊, 2021, 41(1): 77-81, 101.
Gao Jun, Li Xingzhao, Wu Chunjuan, et al. Preliminary study on optimal flight parameters of multi-rotor plant protection UAV in different growth periods of wheat [J]. China Plant Protection, 2021, 41(1): 77-81, 101.
[5]田志偉, 薛新宇, 李林, 等. 植保無(wú)人機(jī)施藥技術(shù)研究現(xiàn)狀與展望[J]. 中國(guó)農(nóng)機(jī)化學(xué)報(bào), 2019, 40(1): 37-45.
Tian Zhiwei, Xue Xinyu, Li Lin, et al. Research status and prospects of spraying technology of plant protection unmanned aerial vehicle [J]. Journal of Chinese Agricultural Mechanization, 2019, 40(1): 37-45.
[6]郭祥雨, 薛新宇, 秦維彩, 等. 植保無(wú)人機(jī)作業(yè)參數(shù)對(duì)棕櫚樹(shù)霧滴沉積的影響[J]. 中國(guó)農(nóng)機(jī)化學(xué)報(bào), 2021, 42(6): 35-40.
Guo Xiangyu, Xue Xinyu, Qin Weicai, et al. Effect of operation parameters of plant protection UAV on droplet deposition of palm tree [J]. Journal of Chinese Agricultural Mechanization, 2021, 42(6): 35-40.
[7]魏源, 蘇強(qiáng), 曾揚(yáng)鵑, 等. 基于多旋翼植保無(wú)人機(jī)的板栗飛防效果研究[J]. 中國(guó)農(nóng)機(jī)化學(xué)報(bào), 2023, 44(6): 82-88, 113.
Wei Yuan, Su Qiang, Zeng Yangjuan, et al. Study on flying defense effect of chestnut based on multi-rotor plant protection UAV [J]. Journal of Chinese Agricultural Mechanization, 2023, 44(6): 82-88, 113.
[8]Chen Pengchao, Ouyang Fan, Wang Guobin, et al. Droplet distributions in cotton harvest aid applications vary with the interactions among the unmanned aerial vehicle spraying parameters [J]. Industrial crops and products, 2021, 163: 113324.
[9]Wang Guobin, Han Yuxing, Li Xuan, et al. Field evaluation of spray drift and environmental impact using an agricultural unmanned aerial vehicle (UAV) sprayer [J]. Science of Thetotal Environment, 2020, 737: 139793.
[10]Wang Juan, Lü Xiaoyi, Wang Bohong, et al. Numerical simulation and analysis of droplet drift motion under different wind speed environments of single-rotor plant protection UAVs [J]. Drones, 2023, 7(2): 128-128.
[11]Chen Shengde, Lan Yubin, Zhou Zhiyan, et al. Effect of droplet size parameters on droplet deposition and drift of aerial spraying by using plant protection UAV [J]. Agronomy, 2020, 10(2): 195.
[12]Chen Pengchao, Lan Yubin, Huang Xiaoyu, et al. Droplet deposition and control of planthoppers of different nozzles in two-stage rice with a quadrotor unmanned aerial vehicle [J]. Agronomy, 2020, 10(2): 303-303.
[13]劉雪美, 宋來(lái)其, 崔慧媛, 等. 氣流霧滴脅迫和冠層孔隙變化對(duì)沉積性能影響解耦研究[J]. 農(nóng)業(yè)機(jī)械學(xué)報(bào), 2021, 52(8): 117-126, 137.
Liu Xuemei, Song Laiqi, Cui Huiyuan, et al. Decoupling on influence of air droplets stress and canopy porosity change on deposition performance in air-assisted spray [J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(8): 117-126, 137.
[14]Zhang Hao, Qi Lijun, Wu Yalei, et al. Numerical simulation of airflow field from a six-rotor plant protection drone using lattice boltzmann method [J]. Biosystems Engineering, 2020, 197: 336-351.
[15]Guo Qiwei, Zhu Yaozong, Tang Yu, et al. CFD simulation and experimental verification of the spatial and temporal distributions of the downwash airflow of a quad-rotor agricultural UAV in hover [J]. Computers and Electronics in Agriculture, 2020, 172: 105343-105343.
[16]李宏澤. 基于CFD理論的植保無(wú)人機(jī)噴灑系統(tǒng)優(yōu)化設(shè)計(jì)與霧滴運(yùn)動(dòng)特性研究[D]. 長(zhǎng)春: 吉林大學(xué), 2021.
Li Hongze. Optimization design of spraying system of plant protection UAV based on CFD theory and research of droplet motion [D]. Changchun: Jilin University, 2021.
[17]張海艷. 植保無(wú)人機(jī)旋翼風(fēng)場(chǎng)作用下的噴頭霧化特性與霧滴沉積黏附規(guī)律研究[D]. 沈陽(yáng): 沈陽(yáng)農(nóng)業(yè)大學(xué), 2023.
Zhang Haiyan. Research on nozzle atomization characteristics and droplet deposition and retention laws of plant protection UAVs under the action of the rotor airflow field [D]. Shenyang: Shenyang Agricultural University, 2023.
[18]符伊晴. 多旋翼植保無(wú)人機(jī)下洗風(fēng)場(chǎng)和噴霧場(chǎng)的運(yùn)動(dòng)規(guī)律研究[D]. 廣州: 廣東技術(shù)師范大學(xué), 2023.
Fu Yiqing. Research on movement regularity of downwash wind field and spray field of multi-rotor plant protection UAV [D]. Guangzhou: Guangdong Polytechnic Normal University, 2023.
[19]Zhu Yaozong, Guo Qiwei, Tang Yu, et al. CFD simulation and measurement of the downwash airflow of a quadrotor plant protection UAV during operation [J]. Computers and Electronics in Agriculture, 2022, 201: 107286.
[20]Tang Yu, Fu Yiqing, Guo Qiwei, et al. Numerical simulation of the spatial and temporal distributions of the downwash airflow and spray field of a co-axial eight-rotor plant protection UAV in hover [J]. Computers and Electronics in Agriculture, 2023, 206: 107634.
[21]張健, 張超, 陳青, 等. 環(huán)境風(fēng)速對(duì)六旋翼無(wú)人機(jī)下洗氣流和霧滴沉積影響研究[J]. 農(nóng)業(yè)機(jī)械學(xué)報(bào), 2022, 53(8): 74-81.
Zhang Jian, Zhang Chao, Chen Qing, et al. Effect of ambient wind speed on downwash airflow and droplet deposition for six-rotor UAV [J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(8): 74-81.
[22]周志艷, 明銳, 臧禹, 等. 中國(guó)農(nóng)業(yè)航空發(fā)展現(xiàn)狀及對(duì)策建議[J]. 農(nóng)業(yè)工程學(xué)報(bào), 2017, 33(20): 1-13.
Zhou Zhiyan, Ming Rui, Zang Yu, et al. Development status and countermeasures of agricultural aviation in China [J]. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(20): 1-13.
[23]蘭玉彬, 陳盛德, 鄧?yán)^忠, 等. 中國(guó)植保無(wú)人機(jī)發(fā)展形勢(shì)及問(wèn)題分析[J]. 華南農(nóng)業(yè)大學(xué)學(xué)報(bào), 2019, 40(5): 217-225.
Lan Yubin, Chen Shengde, Deng Jizhong, et al. Development situation and problem analysis of plant protection unmanned aerial vehicle in China [J]. Journal of South China Agricultural University, 2019, 40(5): 217-225.
[24]陳盛德, 蘭玉彬, 李繼宇, 等. 航空噴施與人工噴施方式對(duì)水稻施藥效果比較[J]. 華南農(nóng)業(yè)大學(xué)學(xué)報(bào), 2017, 38(4): 103-109.
Chen Shengde, Lan Yubin, Li Jiyu, et al. Comparison of the pesticide effects of aerial and artificial spray applications for rice [J]. Journal of South China Agricultural University, 2017, 38(4): 103-109.
[25]潘波, 王冰潔, 姜蕾, 等. 兩種植保無(wú)人機(jī)對(duì)火龍果冠層的作業(yè)參數(shù)優(yōu)化[J]. 植物保護(hù)學(xué)報(bào), 2021, 48(3): 528-536.
Pan Bo, Wang Bingjie, Jiang Lei, et al. Optimization of the operational parameters of two types of plant protection unmanned aerial vehicles (UAVs) application to the pitaya canopy [J]. Journal of Plant Protection, 2021, 48(3): 528-536.
[26]陳盛德, 廖玲君, 徐小杰, 等. 中國(guó)植保無(wú)人機(jī)及其施藥關(guān)鍵技術(shù)的研究現(xiàn)狀與趨勢(shì)[J]. 沈陽(yáng)農(nóng)業(yè)大學(xué)學(xué)報(bào), 2023, 54(4): 502-512.
Chen Shengde, Liao Lingjun, Xu Xiaojie, et al. Research status and trends of plant protection UAV and its key technology of spraying in China [J]. Journal of Shenyang Agricultural University, 2023, 54(4): 502-512.
猜你喜歡
氣象與環(huán)境科學(xué)(2021年4期)2021-08-27 02:26:12
電機(jī)與控制應(yīng)用(2021年12期)2021-02-28 07:55:52
海洋通報(bào)(2020年5期)2021-01-14 09:26:54
中國(guó)電業(yè)與能源(2020年5期)2020-06-16 02:20:00
陜西氣象(2020年2期)2020-06-08 00:54:38
西南交通大學(xué)學(xué)報(bào)(2016年4期)2016-06-15 20:29:37
風(fēng)能(2016年11期)2016-03-04 05:24:00
電測(cè)與儀表(2015年8期)2015-04-09 11:50:06
電機(jī)與控制應(yīng)用(2015年7期)2015-03-01 03:50:15
電網(wǎng)與清潔能源(2015年3期)2015-02-28 16:03:31
 中國(guó)農(nóng)機(jī)化學(xué)報(bào)2024年7期
中國(guó)農(nóng)機(jī)化學(xué)報(bào)2024年7期
- 中國(guó)農(nóng)機(jī)化學(xué)報(bào)的其它文章
- 傳統(tǒng)農(nóng)具造物美學(xué)價(jià)值挖掘及當(dāng)代應(yīng)用研究
- 農(nóng)業(yè)綠色技術(shù)研究進(jìn)展、熱點(diǎn)與展望
- 農(nóng)業(yè)機(jī)械化可以解決農(nóng)業(yè)勞動(dòng)力短缺嗎?
- 鄉(xiāng)村振興戰(zhàn)略背景下促進(jìn)農(nóng)民增收的個(gè)性化研究
- 生計(jì)分化下農(nóng)戶低碳生產(chǎn)技術(shù)采納行為績(jī)效研究
- 生態(tài)農(nóng)業(yè)培訓(xùn)效果的耦合協(xié)調(diào)度研究