基于MRAS的永磁同步電機無傳感器控制系統研究
2016-05-14 13:11:02孟程陳國平
中國科技縱橫 2016年6期
關鍵詞:永磁同步電機
孟程 陳國平

【摘 要】永磁同步電機的有效控制需要可靠的轉子位置信息。為了解決使用機械傳感器的缺點,估算轉子位置的無傳感器技術已經成為近年來的研究熱點。本文研究了基于矢量控制的無傳感器控制技術原理和永磁同步電機的數學模型。對無傳感器控制方法估計轉子速度和位置電機參考自適應系統(MRAS)進行了研究。以永磁同步電機為研究對象,使用MATLAB/SIMULINK進行建模與仿真對系統進行研究。
【關鍵詞】MRAS 永磁同步電機 MATLAB仿真
1 引言
近幾年,國內外的研究將永磁同步電機無速度傳感器控制方法分為三種。首先是基于電機理想模型的開環計算方法;其次是基于各種觀測器模型的閉環算法;最后是以高頻注入法為典型代表的基于電機非理想特性的算法。這些方法各有優缺點,適用的場合不同。目前理論研究熱點主要集中在第二種。狀態觀測器法的實質是狀態重構,這種方法具有穩定性好、魯棒性強、適用面廣的特點。本文采用了基于參考自適應(MARS)理論構造的永磁同步電動機無速度觀測器基礎上,運用滑模變結構控制理論設計了系統總體控制方案,論證出模型參考自適應滑模控制具有快速的響應和較強的魯棒性。對永磁同步電動機無傳感器控制的主要思想是提取可測量的物理量,然后再利用這些物理量通過適當的方式來估算轉子的速度和位置,以實現電動機的閉環控制。
2 系統模型建立
為了建立永磁同步電動機的數學模型,首先進行一下假設:三相繞組完全對稱;忽略了齒輪摩擦;不包括核心損耗。根據上面的假設,建立了永磁同步電動機的數學模型的d、q軸旋轉坐標系方程如下:
從方程(2),可以知道控制永磁同步電動機的電磁轉矩的控制從根本上取決于定制電流在d、q軸的分量。磁場定向控制(FOC)采用基于id=0,不僅由于其易執行性,與此同時,這種控制方法可以有效地抑制由電樞反應引起的退磁,并減少銅耗。對于永磁同步電動機控制,定子電流是獨立于轉子磁通的,并且系統簡單具有良好的轉矩不變性能。由于id=0,磁轉轉矩與正交電流iq是成線性關系的,永磁同步電動機可以看做直流電機。在SPMSM中,Ld=Lq=L,因此方程(1)和(2)可以寫成
建立了磁場定向控制dq坐標系下。估計速度與給定素的相比,和差值通過PI控制器,然后可以計算出給定電流的轉矩分量iq。通過調整轉矩電流分量的誤差PI控制器可以得出轉矩電壓uq。經過坐標變換后,電壓信號SVPWM生成PWM控制信號,并驅動逆變橋。因此,雙閉環矢量控制系統得以實現。
3 模型參考自適應系統(MRAS)方法
模型參考自適應控制系統的工作過程可以看成是參考模型與可調模型之間誤差的調整過程。參考模型方程如下:
4 仿真模型及結果
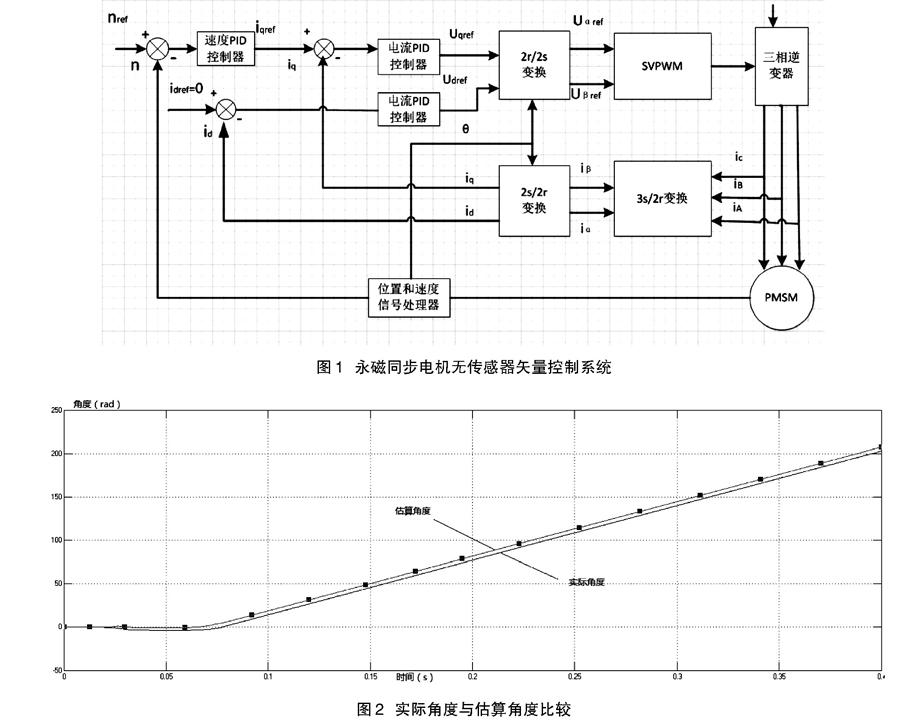
圖1為基于MRAS方法永磁同步電機無速度傳感器矢量控制系統。
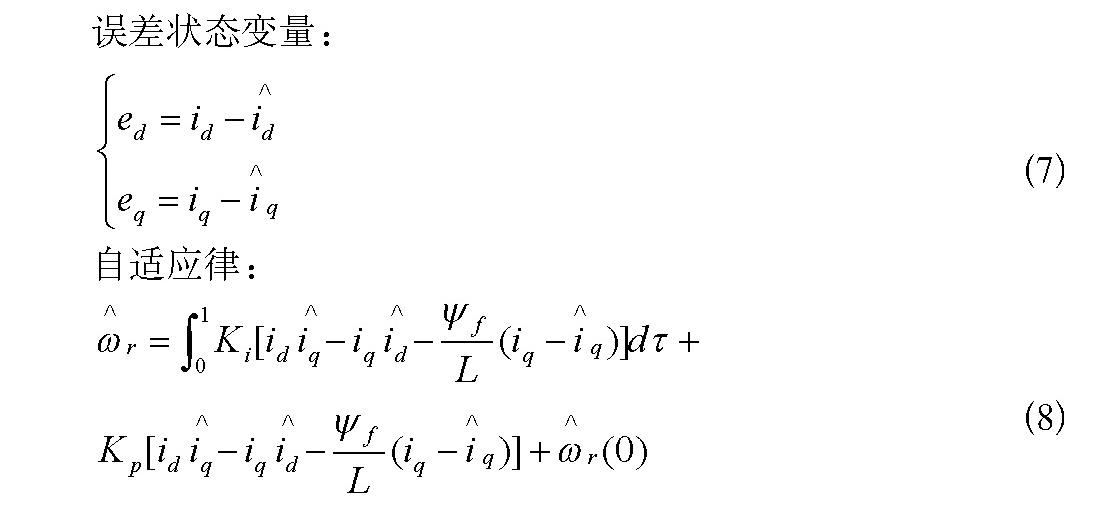
給定的速度設定在1500rpm,電機為空載啟動,在0.2后負載從0N*m增加到1N*m。仿真時間為0.4s。實際角度與估算角度比較圖2所示。
從波形可以得出這樣的結論:MRAS方法具有良好的精度,穩定狀態的穩態誤差小于10rpm,約為0.6%。從電動機啟動到穩定狀態需要0.03s。突然加負載之后需要0.15s回到穩定狀態。響應迅速。
5 結語
本文采用了基于參考自適應(MARS)理論構造的永磁同步電動機無速度觀測器基礎上,運用滑模變結構控制理論設計了系統總體控制方案。通過MATLAB/SIMULINK進行仿真,實驗表明,該控制方法提高了電機的轉速跟蹤性能,具有良好的魯棒性。
參考文獻:
[1] 伊進田,李白雅,黃海. 基于模型參考自適應控制的速度估計方法[J].自動化與儀表,2008(3):9-15.
[2] 李永東,張猛,肖曦等.永磁同步電機模型參考自適應無速度傳感器控制方法[C].第十二屆,全國電氣自動化與電控系統學術年會.2004(12):302-306.
[3] 朱自芳.全數字永磁同步電機無位置傳感器控制系統研究[M].廣州:華南理工大學,2008.
[4] 黃雷,趙光宙,賀益康.PMSM 的自適應滑模觀測器無傳感器控制[J].浙江大學學報(工
學版),2007(41):1107-1110.
作者簡介:孟程(1992—),男,江蘇東臺人,上海理工大學碩士研究生,研究方向:電氣工程。
猜你喜歡
現代電子技術(2017年1期)2017-02-16 11:49:32
汽車工程學報(2016年5期)2017-01-16 02:42:50
計算技術與自動化(2016年4期)2017-01-11 14:06:23
電子技術與軟件工程(2016年19期)2016-12-19 18:43:28
中國科技博覽(2016年15期)2016-08-23 00:59:37
電腦知識與技術(2016年13期)2016-06-29 21:41:37
科技視界(2016年12期)2016-05-25 11:07:56
電腦知識與技術(2016年2期)2016-03-22 22:21:46
電腦知識與技術(2016年1期)2016-03-22 15:49:38
哈爾濱理工大學學報(2015年6期)2016-02-18 00:26:49
