Labview在智能控制教學中的應用*
2016-12-02 03:22:38劉成林
高教學刊 2016年23期
劉成林
(江南大學 物聯網工程學院,江蘇 無錫 214122)
Labview在智能控制教學中的應用*
劉成林
(江南大學 物聯網工程學院,江蘇 無錫 214122)
闡述智能控制課程的教學內容,指出存在問題。結合自身教學經驗,旨在提高本科生關于復雜工程問題的分析與解決能力,文章以示例法展示了Labview軟件在智能控制課程實踐教學的應用。
智能控制;Labview軟件;PID控制器
一、概述
隨著計算機技術、自動控制技術,以及人工智能技術的快速發展,智能控制得到了越來越廣泛的關注與研究,并取得了非常廣泛的應用[1]。隨著對本科和研究生教育的越來越高,自動化類專業的本科或研究生階段都在培養計劃中增加了智能控制課程,而且本科智能控制課程教學收到了許多高校的重視。智能控制基礎課程是在學生學習自動控制原理和現代控制理論基礎控制理論課程之后開設的,是對控制理論知識的進一步提升。智能控制課程重點內容包括模糊控制、神經網絡與神經網絡控制以及遺傳算法,其特點是:內容豐富、交叉性強,概念抽象,對于本科生的教學要求為:掌握模糊控制、神經網絡和遺傳算法的理論基礎與設計應用。作為一門基礎理論課程,智能控制課程的教學改革研究也引起了許多教師的關注[1-5]。
美國國家儀器公司開發的Labview軟件使用圖形進行編程,分為前面板與程序框圖兩部分,其包含的豐富的函數庫,可以實現數據的存儲、分析、顯示等,所以在信號采集、計算機數據采集、數字信號處理、以及自動控制等領域得到廣泛的應用[6]。相對于比較普及的Matlab仿真軟件[4,5],Labview的前面板可以更形象化展示對象的特性,對控制理論的驗證與仿真實驗更具有虛擬仿真效果[7,8]。結合智能控制課程的特點,可以采用Labview設計仿真實驗,可以提高實驗內容的可視性、生動性,可以采取學生自主實驗、或教師演示實驗,均可以激發學生的學習熱情、改善教學效果。
文章根據作者在本科《智能控制基礎》課程中的教學實踐,從教學內容與存在問題出發,對該門課程的進行深入分析,缺乏對學生實踐創新能力的培養。對照2015版的工程教育認證[9],本科生的智能控制課程教學更加缺少培養復雜工程問題的分析與解決能力問題。通過利用Labview仿真軟件設計模糊PID控制器,展示了虛擬仿真軟件在智能控制中的應用,可以推廣到學生實踐訓練和教師課堂中,增加學生學習興趣與教學效果。
二、智能控制的教學內容及存在問題
智能控制是一門多元交叉學科,涵蓋人工智能、自動控制、運籌學等等。作為自動化類本科生,在學習傳統控制理論、計算機控制原理等基礎專業課程之后,學習智能控制課程,可以進一步掌握先進控制理論,主要學習模糊控制、神經網絡、遺傳算法三部分內容。
(一)教學內容
模糊控制是基于模糊集合、模糊關系、模糊推理的一種智能控制技術。模糊控制器是一個模糊推理系統,整體表現為一個非線性函數,通常由四部分組成:(1)模糊化,將精確輸入量轉換為模糊集合,即輸入量的模糊語言取值和相應的隸屬度函數;(2)規則庫,根據被控對象的特性和已有的控制經驗建立模糊規則庫(if-then-),確保完整性、一致性、交互性;(3)模糊推理,集結模糊規則庫,將輸入模糊集合映射出輸出模糊集合;(4)去模糊化,將輸出模糊集合轉換為精確輸出。在控制系統中,除了作為一個控制器外,模糊控制器也通常作為參數自調整器,可以實現非常好的控制效果。
神經網絡是由簡單處理單元構成的規模宏大的分布式并行處理器,從結構和功能上模仿人類腦神經系統,具有并行性和非線性等特點,能夠存儲經驗知識、并使之可用,具有自學習、任意函數逼近器、模式分類等功能。典型的神經網絡模型包括:感知器、BP神經網絡、小腦模型連接控制器、Hopfield網路、柯西網絡等。將神經網路應用控制對象中,主要措施有:學習控制、直接逆動態控制、神經自適應控制、和自適應決策控制等。同時,還可以將神經網絡與模糊控制進行結合,構造性能更好的智能控制策略。
遺傳算法主要模擬生物進化過程中的優勝劣汰、適者生存的自然選擇,也是一直最優解搜索算法。遺傳算法以群體為考察對象,選擇合適的適應度函數,通過給群體中每個個體進行染色體編碼(即基因),并計算相應的個體適應度,依次采取
復制、交叉和變異三個遺傳操作步驟,產生出新一代的種群,并逐代重復進行上述三個步驟。通過遺傳操作,群體不斷更新為更加適應環境的新群體,最終達到最優群體,通過末代群體中的最優個體的解碼,即可得到最優或次優解。
創業型企業共享型人力資源平臺的建設是為助力建設創業型企業的技術創新體系,依據協同學理論,構建多主體、多因素、共同協作、相互補充的共享型人力資源管理平臺,實現創業型企業、高校、高科技人才、教師、學生等多個利益相關者的協同創新發展,推動產學研深度合作,形成創業型企業聯盟和高校聯盟及社會高科技人才的無縫連接,以攻克高科技創新型人才培養和創業型企業可持續發展的瓶頸。
(二)存在問題
根據2015年公布的工程教育認證標準[9],本科畢業要求強調了對復雜工程問題的分析與解決能力。
由于模糊控制、神經網絡、遺傳算法都是建立在一定的數學理論基礎之上的,所以課程理論性強、內容抽象。由于該課程設定的課時通常比較少,所以課堂教學主要集中于理論知識、概念和公式推導上,沒有增設實驗學時,缺乏對學生實踐創新能力的培養。
此外,在本科控制理論課程(包括智能控制課程)教學過程中,控制系統的設計與分析的實踐教學主要通過虛擬仿真軟件(如,Matlab[4,5]、Labview等軟件[6])。然而,大多本科生對這些仿真軟件都沒有熟練掌握,很難對將智能控制理論應用到復雜工程問題中進行仿真研究與分析。
三、基于Labview的實驗示例設計
為了加強學生的復雜工程問題的分析與解決能力,可以通過課堂示例教學與課后實驗習題相結合的方式來展開。文章主要考察模糊控制PID控制器的設計問題,借助Labview軟件進行虛擬仿真實驗。文章利用美國國家儀器(NI)公司的Labview 8.6專業開發版和附帶的模糊邏輯工具箱(Fuzzy Control Toolkit)設計PID參數的模糊控制器。
被控對象選取為二階動態模型:

其中,u為輸入信號,x與y為狀態變量。采用基于狀態 X的PID控制器,閉環系統為:

在Labview中,構建模糊PID的仿真系統,其前面板如圖1所示,模糊PID系統的仿真程序框圖如圖2所示。

圖1 前面板

圖2 程序框圖
程序框圖中用到的主要VI有(如圖2):
1.Fuzzy Controller VI:實現模糊控制器的設計與模糊邏輯控制器的設計項目管理。使用前必須先加載控制器的數據文件,這個文件是由Load Fuzzy Controller VI輸出的。
2.Load Fuzzy Controller VI:加載所有控制器參數和信息。使用此VI與Fuzzy Controller VI實現模糊控制器設計,設置數據文件的加載路徑管理等。數據文件使用.fc作為文件擴展名。
3.加載路徑(函數)。加載控制器的數據文件需要當前VI路徑函數、拆分路徑函數、創建路徑函數,如圖2中的KPcontrol.fc,KIcontrol.fc,KDcontrol.fc數據文件。
4.公式節點。在公式節點中,編寫系統④的程序代碼。此外,模糊PID控制器的設計步驟如下:
(1)在Labview軟件環境下,運行Fuzzy Logic Controller D esign模塊,在交互式界面Fuzzy Set Editor中設計輸人、輸出變量的論域及各語言值的隸屬函數。輸人變量e、ec的論域設為[-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6],并進行歸一化處理,語言值為:負大NB、負中NM、負小NS、零ZO、正小PS、正中PM、正大PB,對應的隸屬函數均為三角形;輸出變量Kp、Ki和Kd的論域為[0,1,2,3,4,5,6],進行歸一化處理,語言值為:零、正小、正中、正大,隸屬函數也均取三角形。
(2)通過Rulebase Editor確定“IF…THEN…”形式的模糊規則,并選擇相應的推理算法和解模糊方法等。模糊推理算法為Max-Min合成法,去模糊化方法為“最大隸屬度法”。
(3)通過I/O Characteristic對設計的模糊控制器輸出特性進行初步測試和分析,驗證控制規則是否完備,是否有規則沖突以對其進行必要的修改和優化。
(4)將設計好的模糊控制器分別保存在后綴名為KPcontr ol.fc,KIcontrol.fc,KDcontrol.fc的數據文件中,在應用程序中調用。
執行程序,可以得到二階系統的階躍相應曲線(如圖3)、以及PID控制器三個控制增益的變化曲線(如圖4)。如圖可見,模糊PID控制器實現了控制參數的自整定,可以實現系統
穩定,便于工程應用。
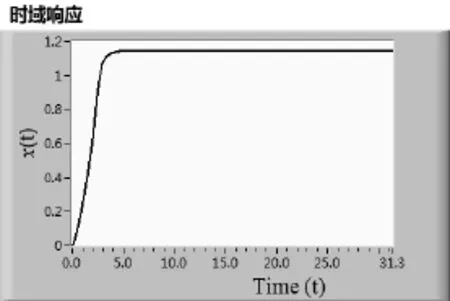
圖3 模糊PID控制的階躍響應曲線

圖4 模糊PID控制參數的變化曲線
通過上述示例展示,Labview軟件能夠應用在智能控制器的設計與分析中。設計虛擬實驗,在前面板上模擬實際對象和觀察狀態變化曲線,在程序框圖中進行模塊化編程,更加生動地展示控制器的設計與分析的有效性與生動性,能夠非常好地增強學生的學習興趣,改善教學效果。
四、結束語
針對本科智能控制課程的教學中缺乏實驗學時,沒有著重培養學生的實踐創新能力,學生關于復雜工程問題的分析與解決能力沒有得到提高,文章指出了Labview軟件在智能控制器設計中的應用。通過實際示例展示了Labview的具體應用,可以推廣到本科生的虛擬實驗教學和課堂教學中,增強學生的學習興趣,培養其復雜工程問題的分析與解決能力。
[1]羅兵,甘俊英,張建民.智能控制技術[M].北京:清華大學出版社,2011.
[2]劉文藝,王曦.智能控制課程設計教學改革研究[J].中國教育技術裝備,2013(21):39-41.
[3]陳錫愛,衛東,王凌,等.項目教學在智能控制終端技術課程教學中的應用和研究[J].教育教學論壇,2014(51):172-173.
[4]毛玉蓉.MATLAB在智能控制課程教學中的應用[J].儀器儀表與分析監測,2008(2):8-9.
[5]劉瑞明,王經卓,龔成龍.MATLAB輔助智能控制課程教學實踐[J].重慶與世界(學術版),2015(11):8-12.
[6]鄧奕,韓劍.LabVIEW虛擬儀器程序設計與應用[M].武漢:華中科技大學出版社,2015.
[7]王文婷,趙錦成,谷志鋒,等.LabVIEW在《電路分析基礎》課程教學中的應用[J].實驗科學與技術,2014(3):49-51.
[8]熊姍霞,蘇韜.基于LabVIEW的自動控制原理實驗教學改革的思考[J].科技創新與應用,2015(33):103.
[9]中國工程教育專業認證協會秘書處.工程教育認證工作指南[Z].2015,3.
The teaching content of intelligent control course is stated,and existing problems are pointed out.In order to improve the undergraduates'analysis and problem-solving ability of complicated engineering problems.This paper demonstrates the application of Labview software in the practice teaching of intelligent control with instance method,combined with the author'teaching experiences.
intelligent control;Labview software;PID controller
G642
A
2096-000X(2016)23-0071-03
江南大學本科教學改革研究項目(JG2015112,JG2015002);江蘇高校品牌專業建設工程一期項目(PPZY2015A036)。
劉成林(1981,09-),男,漢,江蘇宿遷,博士,副教授,研究方向為多智能體系統協調控制。
猜你喜歡
內蒙古教育(2021年20期)2021-03-08 01:09:14
計算機教育(2020年5期)2020-07-24 08:53:38
家庭影院技術(2019年11期)2019-12-09 09:14:30
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
