基于《自動控制原理》期末考試軟件的課程考核改革
2020-10-10 16:52:24肖理慶
廊坊師范學院學報(自然科學版) 2020年3期
關鍵詞:課程
肖理慶
(淮南師范學院,安徽淮南232038)
0 引言
目前大學課程期末考試通常采用由課程組教師集體命題或者從試題庫中隨機抽選并線下考核的方式,而在今年疫情特殊時期,大部分高校采用了線上考核的方式[1-2]。上述考核方式的不足之處在于:
(1)批閱試卷的工作量較大。雖然線上考核可自動批閱選擇題與判斷題,但對畫圖題與計算題等主觀題目無能為力;
(2)無法實現“一人一卷”,不可避免存在抄襲現象;
(3)學生只知道自己最終的期末考試成績,無法明確其具體錯誤之處。
大學課程期末考試與中考、高考不同,不屬于選拔性的考試,其目的與意義不是為了“考”,而是“以考促學”。以此為出發點,針對上述考核方式的不足之處,基于MATLAB自主研發了《自動控制原理》期末考試軟件并將其應用于《自動控制原理》課程考核,不僅實現了“一人一卷”、自動批閱,而且可提供考試反饋結果,從而達到了通過考試幫助學生對所學知識查漏補缺的目的[3-6]。
1 期末考試試卷設置
考試之前需要首先完成《自動控制原理》期末考試試卷設置,如圖1所示,教師輸入自己工號與密碼后,軟件會自動驗證其身份,其中密碼為動態密碼,隨時間(年月日)的變化而變化。待驗證通過后,軟件將自動顯示教師照片、姓名以及《自動控制原理》課程知識點編號,此時教師便可結合《自動控制原理》課程知識點編號設置期末考試試卷參數。其中《自動控制原理》課程知識點包括:利用梅森增益公式計算系統傳遞函數、控制系統相對穩定性等[7-10];《自動控制原理》期末考試試卷參數包括難度系數、選擇題數目與分值、畫圖題與計算題對應知識點編號及其對應分值等。其中難度系數的取值范圍為[0.1-1],隨著難度系數的提高,不僅題目本身難度增大,而且軟件設置的計算題允許誤差減小,即難度系數越高,對計算精度的要求越高。

圖1 期末考試試卷設置
2 智能組卷
根據設置的難度系數、畫圖題與計算題對應知識點編號,軟件在滿足條件的試題范圍內隨機選取畫圖題與計算題,且參數隨機。在此基礎上,根據設置的選擇題數目,以式(1)為適應度函數,利用基于粒子群算法的改進遺傳算法,從滿足設置的難度系數的選擇題范圍里確定所采用的選擇題編號,從而完成智能組卷,其中改進遺傳算法收斂曲線如圖2所示。改進遺傳算法得到的最優值即所采用的選擇題編號方案并不唯一,且所采用的選擇題的順序及其各選項的順序均隨機變化。
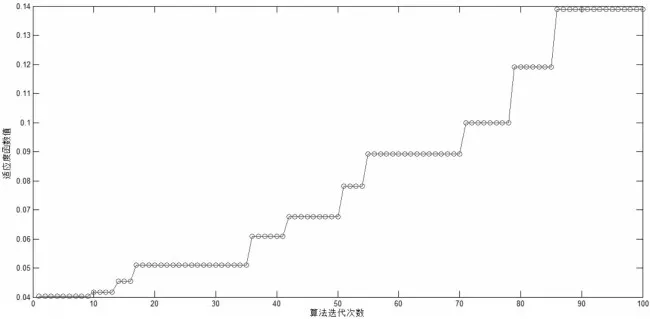
圖2 智能組卷時改進遺傳算法收斂曲線

式中n為設置的選擇題數目;m為設置的畫圖題與計算題數目;X為選擇題編號對應的變量;Y為選擇題、畫圖題與計算題編號對應的變量;ρ為《自動控制原理》課程知識點相關性的系數矩陣。
3 考生答題
考生在答題之前需要首先進行身份驗證,如圖3所示,輸入學號后,軟件提供人臉識別與人工驗證兩種不同方式驗證考生身份。其中人臉識別是以式(2)為誤差函數,利用基于粒子群算法的改進遺傳算法離線優化BP神經網絡權閾值,以進一步提高人臉識別的準確率,改進遺傳算法收斂曲線如圖4所示;人工驗證則需考生輸入考試密碼,此密碼與教師設置期末考試試卷參數時輸入的密碼性質相同,均為動態密碼。待驗證通過后,軟件將自動顯示學生照片、姓名以及選擇題題目,此時考生可以開始答題。

圖3 考生身份驗證界面

式中n為數據的個數;Z、Z?分別為理論值與預測值。
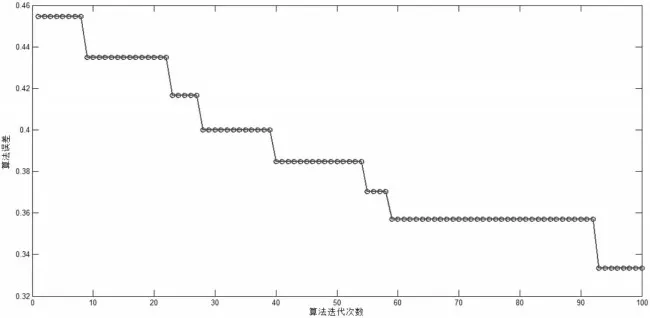
圖4 人臉識別時改進遺傳算法收斂曲線
考生完成選擇題部分后,可繼續作答畫圖題與計算題。待完成全部題目后,軟件將提醒學生答題結束,交卷后,軟件將自動批閱并顯示考生的最終成績。在答題過程中,考生可隨時交卷。
為了防止學生作弊,軟件將監控學生電腦屏幕并保存為連續的BMP格式圖片,如圖5所示,同時軟件自動統計考生切換屏幕的次數,當超過允許的最大值時,軟件將自動交卷。

圖5 軟件監控學生電腦屏幕
另外,考生在答題過程中所完成的全部題目(包括選擇題在內),軟件將以“學生學號×100+n”的形式命名,保存為連續的BMP格式圖片,供學生與授課教師今后使用。
4 查看考試反饋結果
與國內各平臺推出的在線考試軟件相比,基于MATLAB自主研發的《自動控制原理》期末考試軟件不僅具有可自動批閱畫圖題與計算題的功能,更突出的優點是可以查看考試反饋結果,如圖6所示。
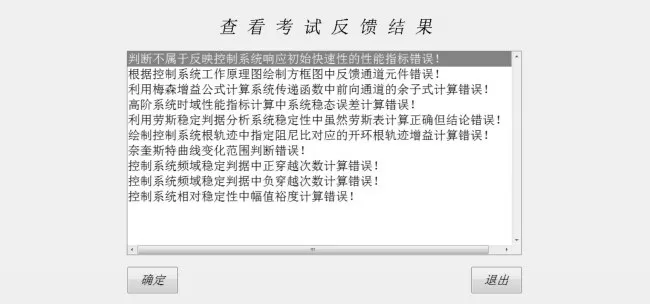
圖6 查看考試反饋結果界面
由考試反饋結果可知,雖然考生的成績(83.75分)比較理想,但仍存在很多問題:
(1)判斷不屬于反映控制系統響應初始快速性的性能指標錯誤!考生可以結合軟件自動保存的BMP格式圖片,核對自己是否漏選調節時間。
(2)根據控制系統工作原理圖繪制方框圖中反饋通道元件錯誤!此反饋信息表明:考生在根據控制系統工作原理圖繪制方框圖時,關于前向通道元件的判斷正確,而反饋通道元件通常由檢測反饋元件組成。結合軟件自動保存的BMP格式圖片,考生可以核對自己對控制系統檢測反饋元件的判斷是否正確。
(3)利用梅森增益公式計算系統傳遞函數中前向通道的余子式計算錯誤!此反饋信息表明:考生在利用梅森增益公式計算系統傳遞函數時,前向通道條數與回路個數的判斷、前向通道增益、回路增益以及特征式的計算均正確。結合軟件自動保存的BMP格式圖片,考生可以核對自己在計算前向通道的余子式時,是否存在“漏環”或者“多環”現象。
(4)高階系統時域性能指標計算中系統穩態誤差計算錯誤!計算高階系統時域性能指標的方法有兩種:定義法與利用閉環主導極點降階法(對定義法的考查難度系數超過0.90),通常采用第二種方法近似計算。此反饋信息表明:考生在計算高階系統時域性能指標時,閉環主導極點的判斷、動態性能指標的計算均正確。結合軟件自動保存的BMP格式圖片,考生可以核對自己在利用閉環主導極點對原傳遞函數降階時,比例系數是否正確(即使比例系數錯誤,也不影響系統動態性能指標的計算結果)。
(5)利用勞斯穩定判據分析系統穩定性中雖然勞斯表計算正確但結論錯誤!此題屬于勞斯判據第二種特殊情況,此時控制系統必不穩定,需要構造輔助方程完成勞斯表的列寫。結合軟件自動保存的BMP格式圖片,考生可以核對自己輔助方程的求解是否正確。
(6)繪制控制系統根軌跡中指定阻尼比對應的開環根軌跡增益計算錯誤!此反饋信息表明:考生根據基本法則繪制控制系統根軌跡正確。結合軟件自動保存的BMP格式圖片,考生可以根據模值條件,核對自己指定阻尼比對應的開環根軌跡增益的計算。
(7)奈奎斯特曲線變化范圍判斷錯誤!此反饋信息表明:考生在繪制奈奎斯特曲線時,起點、終點以及與坐標軸實軸交點的計算均正確。考生可以結合軟件自動保存的BMP格式圖片,核對自己判斷奈奎斯特曲線所在象限是否正確。
(8)控制系統頻域穩定判據中正、負穿越次數計算錯誤!對于曲線ГGH,正、負穿越分別是指ω增加時,曲線ГGH由上向下、由下向上穿越(-1,j0)點左側的負實軸;對于曲線Гφ,正、負穿越分別是指在滿足L(ω)>0的頻率范圍里,ω增加時,曲線Гφ由下向上、由上向下穿越(2k+1)π線。結合軟件自動保存的BMP格式圖片,考生可以核對自己對正、負穿越的判斷是否顛倒。另外,由于考生正、負穿越次數計算錯誤,而軟件只反饋最根本的錯誤,因此,不管考生對控制系統穩定性的判斷和控制系統位于s右半平面極點數目的計算是否正確,本題均不得分。
(9)控制系統相對穩定性中幅值裕度計算錯誤!此反饋信息表明:考生在計算控制系統相對穩定性時,相角穿越頻率、幅值穿越頻率以及相角裕度的計算均正確。考生可以結合軟件自動保存的BMP格式圖片,核對自己在計算幅值裕度時是否存在以下錯誤:
a.系統幅頻特性表達式錯誤;
b.忽視了題目中幅值裕度的單位為dB。
綜上所述,結合軟件提供的考試反饋結果,可以實現以考促學,有效提高了《自動控制原理》課程教學質量,且可應用于對學生學習過程的考核中。
5 結論
為了達到通過考試幫助學生對所學知識查漏補缺的目的,針對目前考核方式的不足之處,基于MATLAB自主研發了《自動控制原理》期末考試軟件并將其應用于《自動控制原理》課程考核中,不僅實現了“一人一卷”、自動批閱,而且提供考試反饋結果,實現了以考促學。
猜你喜歡
云南化工(2021年6期)2021-12-21 07:31:42
內蒙古教育(2021年20期)2021-03-08 01:09:14
作文成功之路·小學版(2020年9期)2020-10-28 08:07:02
計算機教育(2020年5期)2020-07-24 08:53:38
計算機教育(2020年5期)2020-07-24 08:53:20
家庭影院技術(2019年11期)2019-12-09 09:14:30
商周刊(2017年23期)2017-11-24 03:24:01
理科考試研究·初中(2017年4期)2017-11-04 22:12:36
紡織科技進展(2016年3期)2016-11-29 01:27:04
幼兒100(2016年30期)2016-02-28 21:26:29