新工科背景下的雙系統(tǒng)機(jī)器視覺綜合教學(xué)平臺(tái)研制
2020-12-29 12:00:26馬守明嚴(yán)惠李志遠(yuǎn)張國(guó)成
中國(guó)教育技術(shù)裝備 2020年10期
關(guān)鍵詞:機(jī)器視覺
馬守明 嚴(yán)惠 李志遠(yuǎn) 張國(guó)成
摘? 要 分析新工科與智能制造背景下自動(dòng)化專業(yè)群對(duì)人才培養(yǎng)要求;設(shè)計(jì)雙系統(tǒng)機(jī)器視覺綜合教學(xué)平臺(tái)的機(jī)械結(jié)構(gòu),包括視覺部分、擺動(dòng)機(jī)械手裝置、傳動(dòng)機(jī)械手裝置;根據(jù)工藝與硬件要求,完成三菱與西門子雙系統(tǒng)控制電路設(shè)計(jì);提煉系統(tǒng)知識(shí)體系,給出系統(tǒng)可開設(shè)的教學(xué)項(xiàng)目。
關(guān)鍵詞 新工科;自動(dòng)化專業(yè);機(jī)器視覺;雙系統(tǒng);教學(xué)平臺(tái)
中圖分類號(hào):G712? ? 文獻(xiàn)標(biāo)識(shí)碼:B
文章編號(hào):1671-489X(2020)10-0025-03
Abstract The requirements of the automation specialty group for per-sonnel training under the background of new engineering and intelli-gent manufacturing is analyzed; the mechanical structure of the dual system machine vision integrated teaching platform is designed, in-cluding the vision part, swing manipulator device and drive manipu-lator device; the control circuit design of Mitsubishi and Siemens dual system according to the requirements of technology and hard-ware is completed; the system knowledge is extracted and the system
teaching items that can be set up are given.
Key words new engineering; automation specialty; machine vision;? dual system; teaching platform
1 引言
智能制造是上下游全覆蓋、全流程定制化的高科技生產(chǎn)方式。2017年召開的世界智能制造合作高峰論壇上,工信部發(fā)布了《智能制造發(fā)展規(guī)劃(2016—2020年)》,提出十大重點(diǎn)任務(wù),智能制造人才培養(yǎng)不能單單局限于純粹的操作技能培訓(xùn)[1]。隨著生產(chǎn)方式的變化,智能制造行業(yè)對(duì)畢業(yè)生的要求已經(jīng)打破了傳統(tǒng)的知識(shí)架構(gòu),新的知識(shí)結(jié)構(gòu)體系與智能制造設(shè)備開發(fā)崗位對(duì)人才能力的需求越來越綜合[2]。
機(jī)器視覺的出現(xiàn)是為了取代煩瑣的勞動(dòng)力。基于機(jī)器視覺的工業(yè)自動(dòng)化集成設(shè)備能夠進(jìn)行重復(fù)性工作,且適用于危險(xiǎn)工作環(huán)境以及人工視覺難以達(dá)到精度要求的場(chǎng)合。利用機(jī)器視覺的自動(dòng)識(shí)別功能,大大提高了工業(yè)流水線的生產(chǎn)效率,且保證了精度[3]。
在新工科背景下,突出視覺檢測(cè)方向在測(cè)控技術(shù)與儀器專業(yè)人才培養(yǎng)中的教學(xué)地位,是各院校應(yīng)對(duì)新的技術(shù)革命和新興產(chǎn)業(yè)發(fā)展,升級(jí)改造傳統(tǒng)專業(yè)課程體系的建設(shè)舉措[4]。各高校在自動(dòng)化專業(yè)群開設(shè)了眾多融入機(jī)器視覺的課程,針對(duì)人才培養(yǎng)需求,引入了眾多機(jī)器視覺教學(xué)平臺(tái),如基于機(jī)器視覺的藥品生產(chǎn)線瓶蓋縫隙自動(dòng)檢測(cè)設(shè)計(jì)[5-6]、基于機(jī)器視覺和步進(jìn)電機(jī)快速控制系統(tǒng)的氣冰球機(jī)器人實(shí)驗(yàn)教學(xué)系統(tǒng)[7]、基于雙目立體視覺原理的包含雙目攝像機(jī)、標(biāo)定材料、數(shù)據(jù)采集軟件的實(shí)驗(yàn)平臺(tái)[8]等。為了滿足新工科建設(shè)對(duì)自動(dòng)化專業(yè)人才培養(yǎng)的要求,師生創(chuàng)新創(chuàng)業(yè)團(tuán)隊(duì)自主研發(fā)機(jī)器視覺綜合實(shí)驗(yàn)教學(xué)平臺(tái),服務(wù)于專業(yè)綜合實(shí)訓(xùn)課程教學(xué),培養(yǎng)學(xué)生的工程實(shí)踐、設(shè)計(jì)、創(chuàng)新能力。
2 視覺平臺(tái)機(jī)械結(jié)構(gòu)
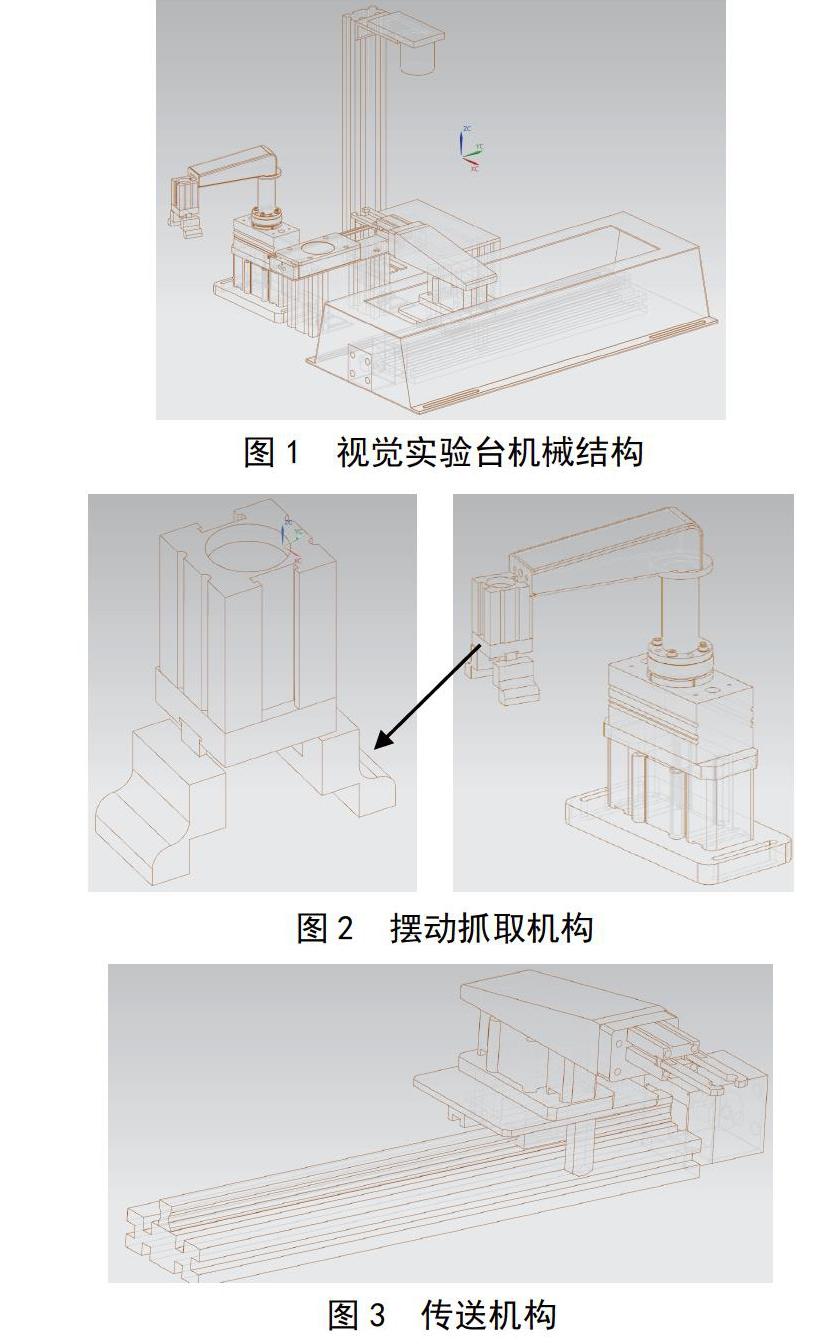
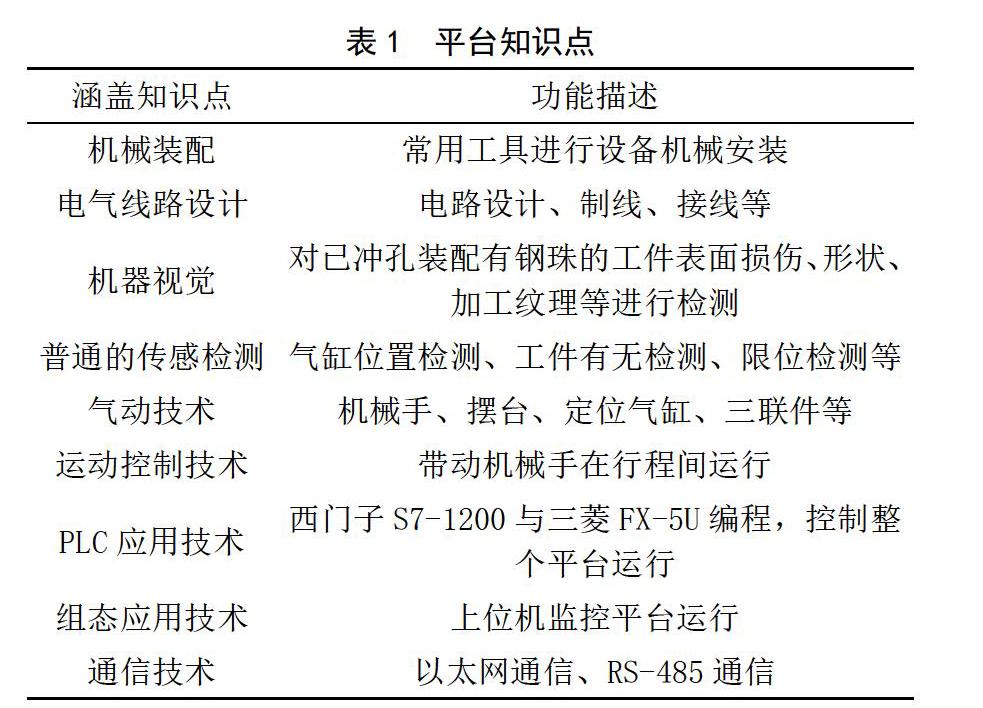
平臺(tái)主要是抓取流水線上小車輸送的圓形沖孔工件,抓取后搬運(yùn)傳送至視覺攝像頭下方檢測(cè),不合格的則放入廢料槽,合格則送回小車上進(jìn)入下一個(gè)工作站。平臺(tái)機(jī)械結(jié)構(gòu)如圖1所示。視覺部分主要是鋁型材支架固定于臺(tái)面合適位置,無須贅述,重點(diǎn)說明傳送機(jī)構(gòu)和擺動(dòng)抓取結(jié)構(gòu)。
擺動(dòng)抓取機(jī)構(gòu)? 物料抓取到滑臺(tái)的抓取機(jī)構(gòu)中用到了擺動(dòng)氣缸,擺動(dòng)抓取機(jī)構(gòu)的機(jī)械手初始位置通過調(diào)節(jié)擺動(dòng)氣缸角度進(jìn)行安裝。機(jī)械手的手爪抓取行程由工件的直徑與厚度決定,工件直徑為6 cm,厚度為1.5 cm,機(jī)械手手爪的范圍為5.8~7.5 cm之間,見圖2。
傳送抓取結(jié)構(gòu)? 在視覺系統(tǒng)中的運(yùn)送機(jī)構(gòu)中由于對(duì)工件的檢測(cè)是對(duì)一個(gè)范圍型特征的檢測(cè),因此對(duì)運(yùn)送機(jī)構(gòu)的精度要求不是很高。如圖3所示,采用步進(jìn)電機(jī)控制抓取機(jī)械手在導(dǎo)軌上的滑行,滑行行程為40 cm,設(shè)置前后限位與極限位行程開關(guān)。
3 控制系統(tǒng)
實(shí)驗(yàn)臺(tái)工藝流程規(guī)劃? 在視覺系統(tǒng)的應(yīng)用要求中,視覺系統(tǒng)的機(jī)械結(jié)構(gòu)主要由視覺檢測(cè)機(jī)構(gòu)、運(yùn)送機(jī)構(gòu)和抓取機(jī)構(gòu)三部分組成,工藝流程為:小車檢車傳感器檢測(cè)到傳送帶上有小車到來,小車定位氣缸工作攔住小車,視覺實(shí)驗(yàn)臺(tái)擺動(dòng)氣缸右擺,升降氣缸下降,擺動(dòng)氣缸機(jī)械手抓取小車上工件后,擺動(dòng)氣缸抬起,左擺,升降氣缸下降,擺動(dòng)氣缸機(jī)械手松開將工件置于滑臺(tái)上,滑臺(tái)右行,傳送機(jī)構(gòu)機(jī)械手抓取滑臺(tái)上工件,在步進(jìn)電機(jī)驅(qū)動(dòng)下前往視覺檢測(cè)區(qū),驅(qū)動(dòng)視覺檢測(cè),若與設(shè)定模板不同,認(rèn)定為廢品,將工件送往廢料槽后,實(shí)驗(yàn)臺(tái)恢復(fù)初態(tài);若通過檢測(cè),則將工件送回小車后,實(shí)驗(yàn)臺(tái)恢復(fù)初態(tài)。
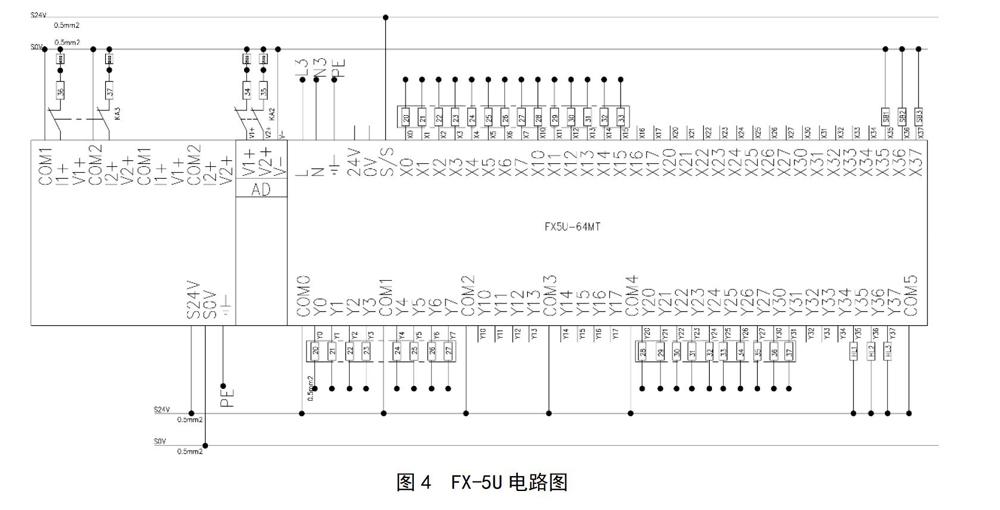
控制電路? 雙系統(tǒng)機(jī)器視覺綜合教學(xué)平臺(tái)采用的是FX-5U和S7-1200雙系統(tǒng),兩個(gè)控制系統(tǒng)均可實(shí)現(xiàn)控制。控制電路如圖4、圖5所示。
4 平臺(tái)教學(xué)項(xiàng)目設(shè)計(jì)
依托平臺(tái)構(gòu)建知識(shí)體系? 雙系統(tǒng)機(jī)器視覺實(shí)訓(xùn)平臺(tái)所涵蓋的知識(shí)點(diǎn)如表1所示,對(duì)自動(dòng)化專業(yè)人才培養(yǎng)方案中大部分的專業(yè)課與專業(yè)基礎(chǔ)課進(jìn)行了有效融合。
依托平臺(tái)開設(shè)的教學(xué)項(xiàng)目? 基于上述知識(shí)體系,自動(dòng)化專業(yè)群學(xué)生各專業(yè)學(xué)生在前序課程尤其是PLC課程選擇其中一個(gè)系統(tǒng)學(xué)習(xí);進(jìn)入專業(yè)綜合環(huán)節(jié)學(xué)習(xí)時(shí),可選擇其中一種系統(tǒng)進(jìn)行主學(xué)習(xí),另一系統(tǒng)可用于拓展訓(xùn)練。可開設(shè)的教學(xué)項(xiàng)目如表2所示。
5 結(jié)語(yǔ)
本文所設(shè)計(jì)的視覺實(shí)訓(xùn)臺(tái)為師生創(chuàng)業(yè)團(tuán)隊(duì)共同研發(fā)的柔性環(huán)形流水線中的工作站,平臺(tái)極具開放性與柔性,改變了傳統(tǒng)的插孔式平臺(tái),使學(xué)生在訓(xùn)練過程能知其然更知其所以然,提升專業(yè)能力與方法能力。
參考文獻(xiàn)
[1]宜科(天津)電子有限公司.智能化人才培養(yǎng) 柔性化教儀先行[J].智慧工廠,2018(11):31.
[2]楊氟,楊康民.智能制造背景下大學(xué)時(shí)期自動(dòng)化智能化設(shè)備開發(fā)的培養(yǎng)探索[J].智能建筑與智慧城市,2019(12):94-96.
[3]陳濤.機(jī)器視覺如何應(yīng)對(duì)與工業(yè)自動(dòng)化系統(tǒng)集成應(yīng)用的挑戰(zhàn)[J].內(nèi)燃機(jī)與配件,2020(1):194-195.
[4]張凱兵,張緩緩,李珣,等.新工科背景下測(cè)控技術(shù)與儀器專業(yè)視覺檢測(cè)方向課程體系構(gòu)建[J].科教導(dǎo)刊,2019(3):17-18,63.
[5]趙巨峰,高秀敏,崔光茫.結(jié)合生產(chǎn)線的視覺檢測(cè)實(shí)驗(yàn)系統(tǒng)設(shè)計(jì)[J].實(shí)驗(yàn)室研究與探索,2016(4):59-62.
[6]張凱兵,景軍鋒,郭亞青,等.基于“項(xiàng)目驅(qū)動(dòng)法”的“工業(yè)機(jī)器視覺測(cè)量與控制”綜合實(shí)踐教學(xué)模式研究[J].科教導(dǎo)刊,2019(1):138-140,162.
[7]李壽杰,宋華軍,興雷,等.基于機(jī)器視覺的氣冰球機(jī)器人實(shí)驗(yàn)教學(xué)系統(tǒng)設(shè)計(jì)[J].實(shí)驗(yàn)技術(shù)與管理,2020(1):200-204.
[8]劉艷,曹光靜,朱金秀,等.雙目視覺實(shí)驗(yàn)平臺(tái)及教學(xué)項(xiàng)目設(shè)計(jì)[J].實(shí)驗(yàn)技術(shù)與管理,2020(1):44-47,51.
猜你喜歡
軟件導(dǎo)刊(2016年11期)2016-12-22 21:52:17
電腦知識(shí)與技術(shù)(2016年28期)2016-12-21 12:13:14
科技視界(2016年26期)2016-12-17 17:31:58
科技視界(2016年25期)2016-11-25 19:53:52
科技視界(2016年25期)2016-11-25 09:27:34
科教導(dǎo)刊(2016年25期)2016-11-15 17:53:37
軟件工程(2016年8期)2016-10-25 15:55:22
科技視界(2016年20期)2016-09-29 11:11:40
科技視界(2016年6期)2016-07-12 09:12:40
科技視界(2016年15期)2016-06-30 19:03:30