基于RTKLIB軟件的“衛星導航原理及應用”課程教學實踐
2021-09-30 04:01:36余德熒李厚樸程海軍紀兵
教育教學論壇 2021年37期
關鍵詞:教學實踐
余德熒 李厚樸 程海軍 紀兵

[摘 要] “衛星導航原理及應用”是海軍工程大學導航工程專業學歷教育的核心課程,該課程是導航工程專業學員學習衛星導航知識與導航學科其他相關知識的基礎。針對“衛星導航原理及應用”課程教學需求,引入專業GNSS定位軟件RTKLIB,對課程中涉及的實時定位解算、后處理分析和可視化分析等典型問題進行研究,并繪制了相應的軌跡圖、星空圖、殘差圖和各類參數變化圖等圖像,使抽象、枯燥的教學內容以形象、直觀的方式展示出來。教學實踐表明,RTKLIB軟件的應用不僅促進了學員對于衛星導航相關教學內容的理解,而且提高了學員的實踐創新能力,取得了良好的教學效果。
[關鍵詞] 衛星導航;全球導航衛星系統;教學實踐;開源程序包
[基金項目] 2017年度國家自然科學基金資助項目“空間地圖投影計算機代數精密分析研究”(41771487);2019年度國家自然科學基金資助項目“海上劃界和北極航線專用海圖及其法理應用研究”(41971416);2019年度湖北省杰出青年科學基金資助項目“地圖海圖投影計算機代數精密分析研究”(2019CFA086)
[作者簡介] 余德熒(1998—),男,廣東潮州人,海軍工程大學電氣工程學院2020級控制科學與工程專業碩士研究生,研究方向為衛星導航;李厚樸(1985—),男,山東鄆城人,博士,海軍工程大學控制工程教研室副教授,碩士生導師,主要從事衛星導航研究;程海軍(1981—),男,遼寧朝陽人,碩士,海軍工程大學教務處講師,主要從事教學管理和衛星導航研究。
[中圖分類號] G642.0? ?[文獻標識碼] A? ?[文章編號] 1674-9324(2021)37-0089-04? ? [收稿日期] 2021-04-15
一、引言
衛星導航系統不僅是國家安全和經濟的基礎設施,也是體現現代化大國地位和國家綜合國力的重要標志。衛星導航為民用領域帶來巨大的經濟效益。當今社會,衛星導航已成為經濟發展的強大發動機,全球導航衛星系統已成為重要的基礎。軍事應用歷來是衛星導航的重要領域。衛星導航可為各種軍事運載體導航,已成為武裝力量的支撐系統和倍增器。當今世界正面臨一場新軍事革命,衛星導航系統作為一個功能強大的軍事傳感器,已經成為天戰、遠程作戰、導彈戰、電子戰、信息戰及導航戰的重要武器[1]。“衛星導航原理及應用”是我校導航工程專業學歷教育的核心課程,該課程是導航工程專業學員學習衛星導航知識與導航學科其他相關知識的基礎[2]。鑒于衛星導航系統具有較強的民用價值和軍事意義,該課程被大學列為導航工程專業必修課程和其他專業選修課程[3]。
該課程主要講授衛星導航系統的發展和應用、衛星導航常用坐標與時間系統、衛星軌道理論、衛星導航系統組成、定位原理、定位性能、全球衛星導航系統、衛星導航增強系統及衛星導航新技術與展望等內容[4,5]。由于涉及導航電文、觀測數據、星歷、鐘差、衛星可見性、精度因子、信噪比、多路徑、截止高度角等許多復雜抽象的概念和實時定位解算、后處理分析、可視化分析等大量枯燥煩瑣的數學推導,傳統上僅依賴于教員課堂語言描述結合板書的教學方法,不僅講授難度較大,而且由于不能直觀展示衛星導航系統運行情況,對學員的空間想象能力要求較高,常常造成學員理解上的困難,甚至使其產生厭煩情緒,教學效果不佳。
計算機技術和數據分析處理軟件因其便捷性與生動性,近年來在專業課程教學中得到了廣泛應用[6-8]。為了豐富教學手段,近年來課程組將開源程序包RTKLIB(Open Source Program Package)軟件引入“衛星導航原理及應用”課程教學中,制作了許多形象生動的圖像,把適合動態演示的內容直觀地展示出來,并通過軟件操作實踐,極大地激發了學員學習的興趣,充分調動了學員學習的積極性。
二、RTKLIB軟件簡介
RTKLIB是日本東京海洋大學Tokyo University of Marine Science and Technology開發的一個開源程序包,用于全球導航衛星系統的標準和精確定位,內置詳細的參數調整功能,可以設置定位方式,可以設置星歷,可以查看衛星數據,讓用戶可以更方便地執行定位標準設置[9]。RTKLIB由一個可移植的程序庫和幾個利用該庫的應用程序組成,擁有很多工具,支持AP啟動器、實時定位、通信服務器、后處理分析、RINEX轉換器、繪制解決方案和觀察數據、全球導航衛星系統數據下載、NTRIP瀏覽器等功能,滿足用戶對定位的需求。RTKLIB 2.4.2應用程序啟動器基本界面如圖1所示。
三、RTKLIB教學實例
(一)RTKNAVI實時定位解算
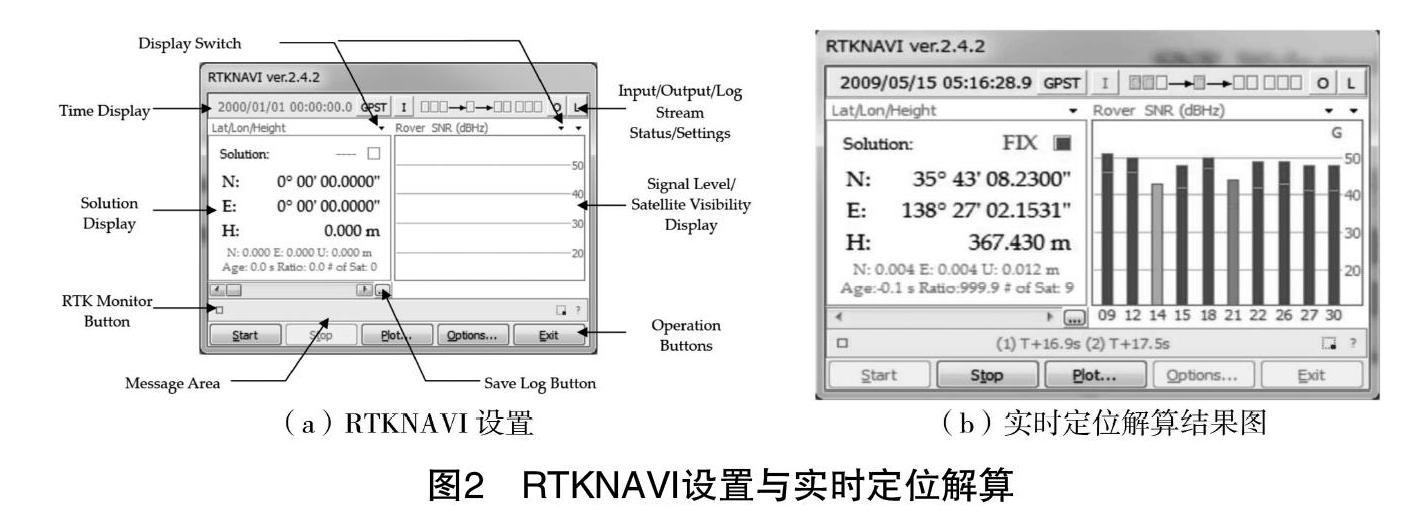
衛星導航的基本作用是向各類用戶和運動平臺實時提供準確、連續的位置、速度和時間信息。導航的核心是定位。實時定位是根據接收機觀測到的數據,實時地解算出接收機天線所在的位置。利用RTKLIB的RTKNAVI軟件,輸入GPS/GNSS接收機原始觀測數據和星歷信息,配置輸入、輸出和日志流等,可以實時進行導航處理。
RTKNAVI設置如圖2(a)所示。各項內容設置完畢,點擊“Start”按鈕開始運行。解算后的實時定位結果如圖2(b)所示。由圖2(b)可以看出,GPS的定位結果為北緯35°43′08.2300″,東經138°27′02.1531″,高程367.430m,N方向的定位偏差為0.004m,E方向的定位偏差為0.004m,U方向的定位偏差為0.012m,14號星未被使用,21號星等待連接,9、12、15、18、22、26、27、30號星已連接。
通過RTKLIB的RTKNAVI實時定位解算,學員可以直接地觀察經緯度、高程、N/E/U方向的定位偏差、衛星運行情況和流動站信噪比等導航定位信息隨時間的變化情況,從而加深他們對衛星導航定位的理解。
猜你喜歡
情感讀本·理論篇(2016年9期)2016-11-05 17:34:26
文藝生活·中旬刊(2016年10期)2016-11-04 06:21:11
職業(2016年10期)2016-10-20 22:23:49
職業(2016年10期)2016-10-20 21:59:29
課程教育研究·學法教法研究(2016年21期)2016-10-20 18:05:35
科技視界(2016年22期)2016-10-18 16:51:33
科技視界(2016年21期)2016-10-17 18:57:24
考試周刊(2016年79期)2016-10-13 23:10:24
考試周刊(2016年79期)2016-10-13 23:09:42
考試周刊(2016年79期)2016-10-13 21:37:05
