某火車滾裝船雙舵槳控制系統研究
2021-11-09 18:01:21鐘浩權陳亞金陳婷婷蔡小媚
廣東造船 2021年5期
關鍵詞:同步
鐘浩權 陳亞金 陳婷婷 蔡小媚

摘? ? 要:以我司在建產品某火車滾裝船為依托,研究分析不同廠商對舵槳控制系統的不同設計理念,從而進一步了解舵槳控制系統的組成、原理及設計思路,為后期類似產品船的開發設計和設備訂貨提供相關參考。
關鍵詞:自動舵;隨動;非隨動;同步;異步
中圖分類號:U664.82 ?? ? ? ? ? ? ? ? ? ? ? ? ? ? 文獻標識碼:A
Control System of Double Steering Oar of Train Ro-Ro Ship
ZHONG Haoquan, CHEN Yajin, CHEN Tingting, CAI Xiaomei
( CSSC Huangpu Wenchong Shipbuilding Co., Ltd., Guangzhou 511462 )
Abstract: Based on the train ro-ro ship under construction of our company, this paper studies and analyzes the different design ideas of different manufacturers on steering oar control system, so as to further understand the structure, principle and design ideas of steering oar control system, and provide reference for the development, design and equipment ordering of similar product ships in the later period.
Key words: Autopilot; Follow up; Non follow up; Synchronous; Asynchronous
1? ? ?前言
滾裝船作為60年代開始發展起來的一種運輸船型,由于其具有裝卸速度快、費用低、對碼頭要求不高、實現門對門服務等特點,在船舶市場上的需求快速地增長。同時,隨著現代科學技術的不斷發展和各種先進儀器的使用,船舶智能化控制程度也在不斷的提升。如何最大化地發揮船舶的經濟性、操縱性以及安全性,成為船東在設計建造過程中的重點關注指標,通過對舵槳控制系統的詳細研究,對這些指標的實現有著重大的意義。
2? ? 船舶舵槳控制系統的分類
船舶舵槳是保證船舶安全航行并具有良好操縱性的重要設備之一。其控制系統從操舵方式來分,可分為自動控制及手動控制兩種模式。
(1)自動控制系統
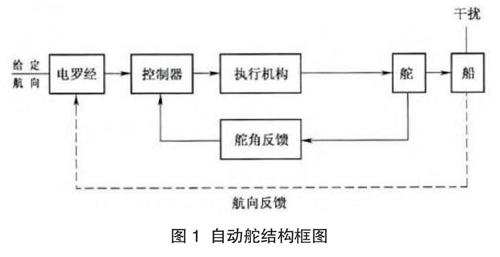
自動控制系統主要是通過自動操舵裝置進行,即通常所說的自動舵系統。它能夠自動糾正船舶的航向偏離,使船舶在較長時間保持在預先規劃好航線方向上的一種操舵裝置[2],其主要結構框架見圖1。
自動控制的主要原理是:當船首受到風浪、海流等外界因素作用而偏離原航向一定角度時,系統通過采集船舶的首向、航速、風向等信息在軟件中進行分析計算,并作出相應的修正動作指令發送到舵機系統進行舵角調整,船首在舵力作用下逐漸返回預定航向,是一種不需要人為干預自動實現舵槳控制的過程。
(2)手動控制系統
手動控制模式下,船舶只能通過駕駛員人為判斷船舶所需首向而進行的一種首向修正操舵。手動操舵模式根據其控制原理,又分為隨動與非隨動兩種控制方式:
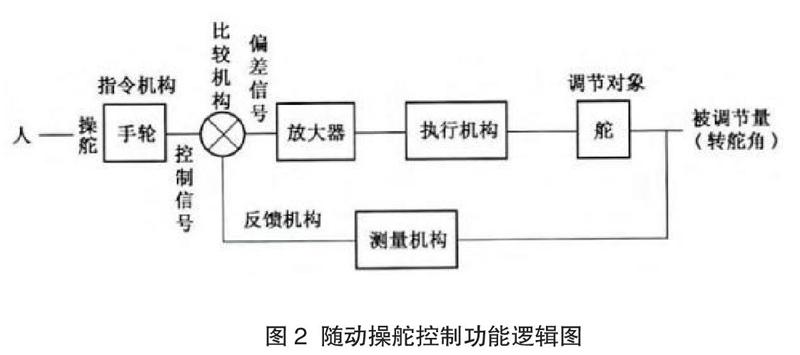
隨動控制(稱FU)是船舶操舵控制系統中最為普遍的一種形式,其控制功能邏輯見圖2。當舵手通過操舵手輪轉到所需舵角時,舵角信號經過放大器執行機構等對舵葉按照所需舵角方向進行調整,并在調整過程中測量機構對舵角變量進行不斷監測并實時反饋到比較機構,系統根據反饋信號與控制信號之間的對比繼續調整轉動舵葉,使得實際調整的舵角準確地操作手輪指令角度一致。概括來說,就是帶舵角信號反饋的一種控制,系統通過對反饋回來的舵角信號進行處理,使得舵葉位置嚴格跟隨著操舵手輪的轉動角度而動的一種閉環操舵控制,在此種控制模式下,舵的實際位置與操縱臺處所顯示的舵角指針位置間的偏差不得超過±1°。
非隨動控制(簡稱NFU)就是常說的直接控制或應急操舵控制。一定意義上來說,就是不帶任何舵角信號反饋的控制。
3? ? 船舶概況
我司承建的兩艘火車滾裝船項目作為美國與墨西哥港口之間往返的特定航線定制船,其主要技術參數如下:
總長? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 180.00 m
型寬? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?36.60/38.60 m
主甲板高度? ? ? ? ? ? ? ? ? ? ? ? 10. 0 m
設計吃水? ? ? ? ? ? ? ? ? ? ? ? ? ? ?6.70 m
結構吃水? ? ? ? ? ? ? ? ? ? ? ? ? ? ?7.00 m
載重噸? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?18 950 DWT(設計吃水)
20 720 DWT(結構吃水)
設計航速? ? ? ? ? ? ? ? ? ? ? ? ? ? ?約14 kn
航區? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?無限航區
入級? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ABS船級社。
該船主要配置如下:配備兩臺小缸徑低速機,通過兩套軸系直接驅動可調螺距槳;加裝了全球首制的ECO-EGR廢氣再循環處理系統;在船舶航行控制系統方面,推進遙控集成了定轉速、定螺距及聯動三種模式;舵槳操作中配備了雙舵同步/異步控制系統,在駕駛室及橋樓兩翼操作位均能通過同步/異步模式選擇開關,實現雙舵獨立異步控制及同步控制兩種功能的切換,使得船舶操縱更加靈活、穩定地適應各種工況下的操作需求。
4? ? 雙舵槳控制系統
4.1? ?系統的組成
自動舵系統框架示意圖,如圖3所示。結合ABS船級社規范4-3-4/13.5及規格書對自動舵系統的控制要求,本項目自動舵系統在駕駛室、左右翼控制臺中的主要配置見表1。
4.2? 系統的功能
如圖3所示,駕駛室作為船舶航行過程中的主要操作位,其配置復雜,集成了自動舵系統中的自動操舵功能、手動隨動操舵、手動非隨動操舵三種功能,其中手動操舵功能中又分為雙舵的同步控制及異步控制兩種功能。
當進入自動操舵功能模式時,在駕駛員預設好航向后,則由自動舵系統自動操作;當進入手動隨動操舵時,通過FU選擇面板將控制選擇到同步模式工況,船舶首向則由隨動同步大手輪進行調整控制;當選擇到異步模式工況時,可以通過左右舵槳的FU分別單獨控制對應的舵槳;手動非隨動操舵功能作為一種應急操舵功能,通常在船舶應急狀態下使用,通過越控單元將操舵權限從自動舵中切換到NFU操作舵葉轉向,且通過NFU同步/異步選擇開關可實現兩舵槳的單獨或同步控制。
當船舶操縱權限從駕駛室轉至橋樓甲板左右翼臺操作時,在同步/異步選擇開關進行模式選擇后,左右翼操作位同樣具備NFU對舵槳實現單獨或同步控制。
4.3? ?系統的關鍵技術
本項目雙機雙槳控制系統區別于以往船舶的主要技術關鍵,在于左右翼臺雙槳的NFU。根據項目規格書要求,左右翼臺應配置NFU并具備雙槳的同步/異步功能,然而不同設備廠商對雙槳同步功能的實現有不同的設計理念,其差異主要存在于當進入NFU模式前,如果兩舵槳的初始角度不一致時,NFU將存在以下兩種實現理念:
(1)NFU是應急操舵的一種方式,其操作執行應優先響應至所需舵槳轉向,其實現邏輯見圖4。即NFU發出轉舵指令時,兩個舵槳立即以保持原始相差角度進行轉舵響應,在轉舵過程中兩舵槳相對中線角度始終是保持不一致的角度,此種同步的實現過程僅僅是兩舵葉轉舵的角速度同步,雖然是快速響應了船舶所需轉向,但由于雙槳的舵角不一致,螺旋槳推動的水流方向也不一致,導致船舶結構受力不均而引起振動;
(2)為避免由于舵槳角度不一致引起的船舶振動而帶來的船體應力集中問題,在NFU同步操舵時,系統應先判斷兩舵槳的起始舵角是否一致,如不一致則優先將兩舵槳舵角往一個角度靠攏調整到相同角度后再往所需舵槳方向轉動,如圖5所示。換言之,此種同步的實現過程是為保證轉舵過程中兩舵槳時刻相對船舶中線具有相同的角度,保證兩舵葉的平行。但是由于此種設計在調整兩舵角起始角度一致時需要一定的時間,相比于理念(1)的設計,其船舶操縱性能響應性較差。
通過上述兩種同步轉舵實現過程的比較可知,兩種理念對于廠家所配置的模塊及功能實現卻有天壤之別,投入的成本也大不相同。由于NFU指令是不經過轉舵控制單元處理,而直接將信號控制轉舵電磁閥進行轉舵動作;對于理念(2)設計的系統,其設備配置需額外增加一套單獨轉舵處理模塊,以實現調整兩舵槳至一致的起始角度后再同步轉舵,控制系統更為復雜,費用也要高很多。由于前期產品開發階段與船東未就此技術狀態進行詳細的澄清,建造合同生效后,在設備訂貨過程中為準確配置并滿足規格書中的功能要求,經過與設計院、設備廠商及船東多次進行詳細的技術細節溝通,最終選擇了理念(1)進行配置。值得強調的是,雖然避免了理念(2)設計的配置,但其中對于船廠在建造中設備成本投入的風險來說是相當大的,因為前期設備經營詢價時,設備商都是以最基本的配置進行預報價,如船東選擇理念(2)的設計,則訂貨成本會大大超過產品船的開發成本。
5? ? 結束語
隨著近年來航運市場的低迷,高效率、高質量、低成本等理念,已成為船廠在承接船舶訂單競爭中得以生存的重要方針之一。本文針對該船雙舵槳控制系統的研究只是控制成本的措施之一,旨在為船廠往后相關產品船型開發時進行引導,強調在產品承接時應著重考慮類似技術細節與船東的澄清,以確保經營詢價的準確性,降低后期訂貨超目標成本的風險。
參考文獻
[1]陳睿童,龔俊毅.船舶自動舵控制技術的發展分析[J].科學技術創新. 2019(22).
[2]鄒明文.簡述船舶操縱自動舵原理[J].科技天地.2011(8).
[3]程啟明,劉其明,王志宏,孫干超.船舶自動舵控制技術的發展研究[J],計算機自動測量與控制. 2000.8(6).
[4]黃繼起.自適應控制理論及其在船舶系統中的應用[M].北京:國防工業出版社.1992, 4(1).
[5]李圓明.船舶航跡舵控制技術研究與設計[J].科技創新與應用.2014.
[6] ABS, Rules For Conditions Of Classification 2018.
[7]徐國平,張顯庫. 船舶自動舵研究綜述[J].中國造船. 2013,54(2).
猜你喜歡
教學與管理(中學版)(2016年12期)2017-01-07 09:52:32
商情(2016年42期)2016-12-23 14:26:58
美與時代·城市版(2016年8期)2016-11-10 01:02:17
中國科技博覽(2016年12期)2016-05-09 03:53:41
中國科技博覽(2016年5期)2016-04-23 11:10:24
新課程·中旬(2015年11期)2015-12-11 08:14:29
教育教學論壇(2015年33期)2015-12-10 22:18:33
軟科學(2015年10期)2015-10-28 02:28:08
計算技術與自動化(2015年2期)2015-09-09 17:47:31
計算技術與自動化(2015年1期)2015-04-10 18:14:26
