三輪全向移動機器人運動控制研究與實踐
2022-01-08 20:14:38程曉峰
商業2.0-市場與監管 2022年1期
關鍵詞:移動機器人
摘要:本文首先闡述了三輪全向移動機器人在工作生活中的廣泛應用,提出了三輪全向移動機器人的電氣控制、三角形底盤運動控制設計方案,構建了機器人運動模型,并對機器人輪子進行運動學分析,最后通過在虛擬工廠和斜坡上的移動測試,實踐充分證明了本文設計的移動機器人運動控制方案具有更優的適應性和穩定性。
關鍵詞:移動機器人;三輪全向;三角形;運動控制
輪式移動機器人按照輪子數量可分為獨輪、兩輪、三輪、四輪和多輪移動機器人。在實際應用中,往往會根據實際需要來選擇輪式移動機器人。其中,獨輪和兩輪機器人占地面積小且運動最為靈活,但豎直方向部分容易翻倒,是需要自平衡控制的倒立擺結構。三輪移動機器人雖然靈活性不如獨輪和兩輪,但結構穩定不容易翻倒,且靈活性比四輪移動機器人要強很多。因此兼具穩定性和靈活性優點的三輪移動機器人在實際工作生活中的應用非常廣泛。目前全向輪和轉向機構是輪式全向移動機器人研究的熱點,全向輪主要包括麥克納姆輪、正交輪和連續切換輪等[1]。
當機器人需要在場地進行前進、后退、平移、旋轉、爬坡等任務時,那么機器人輪系應該選擇全向輪。本文針對三輪全向輪移動機器人的運動控制進行分析與研究。
1.機器人的電氣控制
本文中移動機器人控制采用以NI公司的Myrio為核心,環境感知與姿態判斷通過IR、PING、QTI、9軸傳感器MPU9250等來感知和檢查,執行單元采用套件中提供的直流電機和伺服電機。機器人應具備2路超聲波、2路紅外、4路QTI、提升機構限位開關和陀螺儀檢測能力。通過兩塊MXP-MD2驅動板完成3個底盤電機和零件架提升、下降電機的驅動任務。手臂伸縮電機用于調整抓球套筒的位置以便抓取高爾夫球,套筒內的高爾夫球每次放球通過放球電機控制與撥片相連的繩子的開合來實現。攝像頭具有旋轉、補光功能,通過USB直接連接在Myrio上。在機器人上安裝了指示燈,通過指示燈的亮、滅狀態來對機器人工作狀態進行判斷。
2.機器人底盤運動控制
本文選擇移動機器人的底盤機構采用3個全向輪,3個電機為Studica提供的帶編碼器的12V直流減速電機,電機驅動器采用Studica提供的MXP-MD2電機驅動板。控制器和HUB的供電由黑鷹板(Black Hawk)實現轉接,兩塊驅動板的供電和電源并接,底盤電氣控制接線。
這里采用三角形的搭建方法,電機之間的角度是120°,并且使用全向輪作為運動輪,可以實現機器人在場地中運行時不受姿態方向的影響,360°全方位的運動,從而機器人可實現前進、后退、平移、旋轉、爬坡等能力,這樣搭建的底盤能夠保障機器人足夠穩定的完成所規定的任務。這樣不但可以在運動性能上會更加靈活,而且可以減少一個套件電機節約了制作成本。
3.三輪全向輪運動學分析
三個輪子互相間隔120°,每個全向輪由若干個小滾輪組成,各個滾輪的母線組成一個完整的圓。機器人既可以沿輪面的切線方向移動,也可以沿輪子的軸線方向移動,這兩種運動的組合即可以實現平面內任意方向的運動。
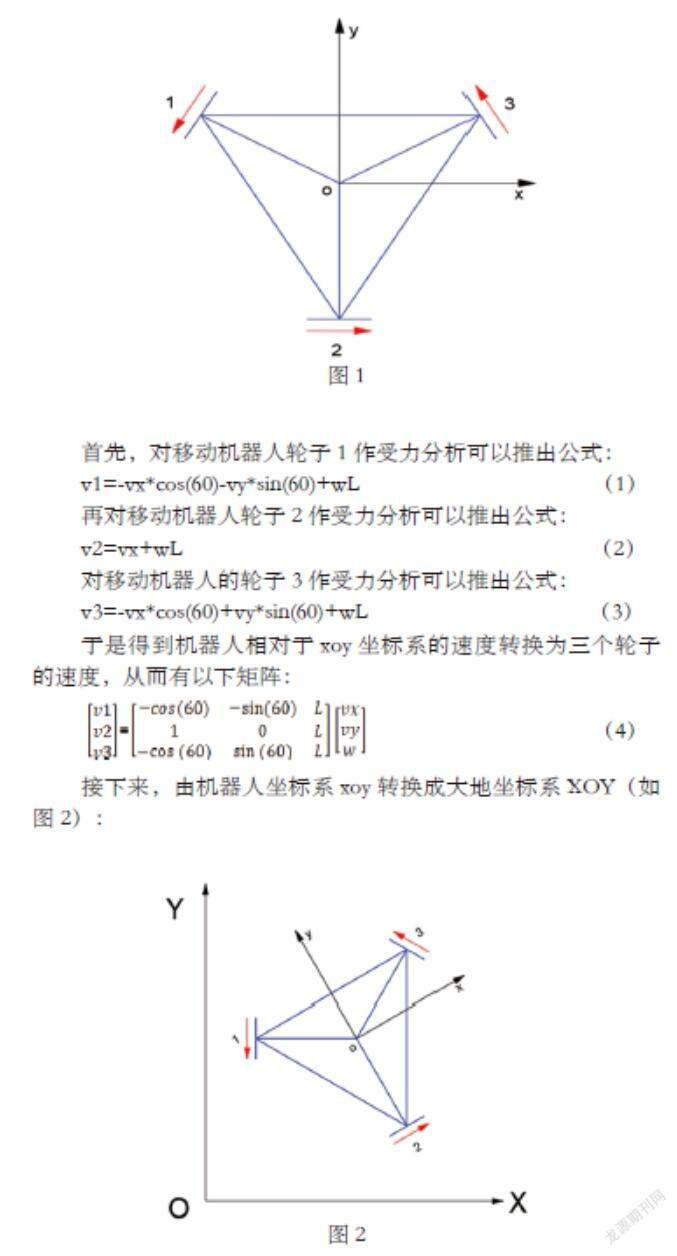
這里依據移動機器人全向輪的三個輪子(輪1、輪2、輪3)采用120°的安裝方式構建三輪全向移動機器人的運動模型,建立移動機器人的坐標系xoy如圖1所示:
首先,對移動機器人輪子1作受力分析可以推出公式:
v1=-vx*cos(60)-vy*sin(60)+wL? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(1)
再對移動機器人輪子2作受力分析可以推出公式:
v2=vx+wL? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? (2)
對移動機器人的輪子3作受力分析可以推出公式:
v3=-vx*cos(60)+vy*sin(60)+wL? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(3)
于是得到機器人相對于xoy坐標系的速度轉換為三個輪子的速度,從而有以下矩陣:
? ? ? ? ? (4)
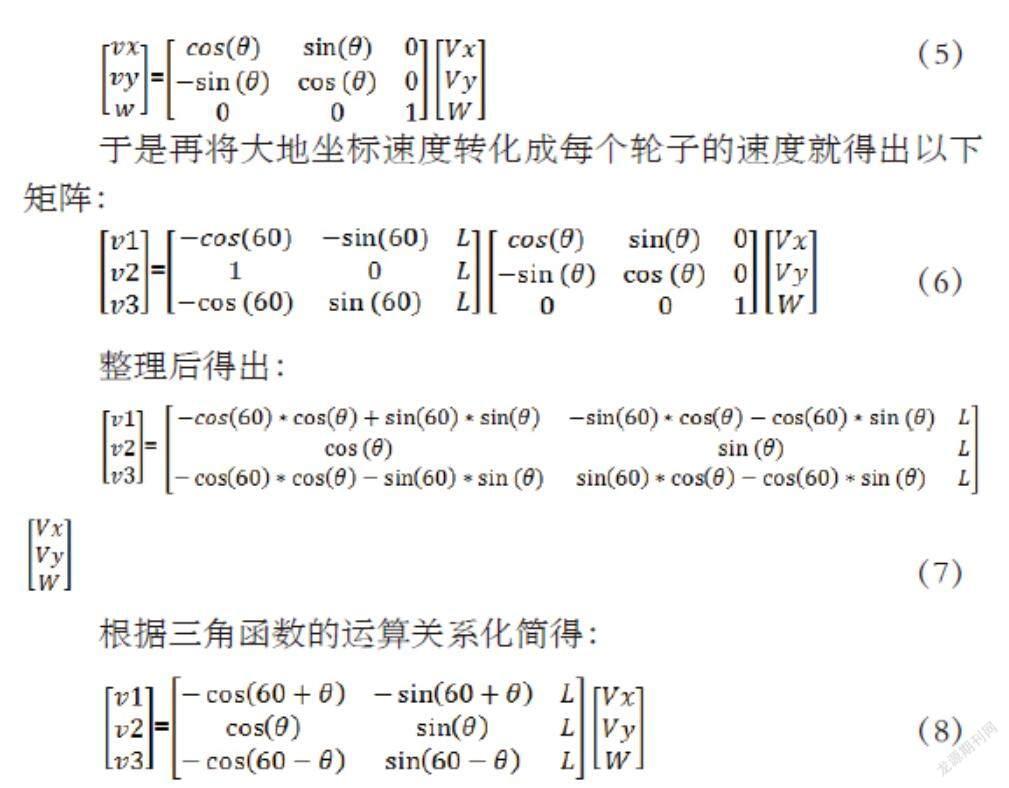
接下來,由機器人坐標系xoy轉換成大地坐標系XOY(如圖2):
可得出以下矩陣方程:
(5)
于是再將大地坐標速度轉化成每個輪子的速度就得出以下矩陣:
(6)
整理后得出:
(7)
根據三角函數的運算關系化簡得:
(8)
通過此方程即可以將場地的速度與輪子的速度連接起來,就可以根據這個算法將輪子的速度算出來,由此可以通過控制機器人電機的轉速從而控制輪子的運動。
在坐標移動方式中可分為相對坐標移動與絕對坐標移動,相對坐標移動就是已機器人自身作為坐標運動的中心,可以向任意方向運動,而絕對坐標移動是已運動空間中的某一個點作為坐標運動的中心向任意方向運動。
4.結論
本文所設計的移動機器人需要在2m*4m的“虛擬工廠”中完成自由移動,其中包括機器人在出發區域、工作站、零件站、斜坡平臺,經過反復測試實踐,機器人在該場地中均能夠成功地、穩定地完成前進、后退、旋轉動作。
并且機器人在虛擬工廠中的斜坡平臺上進行移動測試時,正是因為機器人采用了三角形底盤布置,重心相對更加穩定,從而可以得出采用這種三輪框架結構的移動機器人運動性能和適應性方面更加優越,能夠滿足斜坡等惡劣條件下的移動需求。
參考文獻:
[1]文相容,周宇生.三輪移動機器人的精確運動控制設計[J].重慶大學學報,2021年5月第44卷第5期
作者簡介:程曉峰(1977.4—),男,遼寧撫順人,副教授,工學碩士,主要從事機電工程、機器人技術方面研究。
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
四川輕化工大學學報(自然科學版)(2021年3期)2021-08-30 06:37:02
中國慣性技術學報(2019年3期)2019-10-15 07:21:02
電子測試(2018年15期)2018-09-26 06:01:34
制造技術與機床(2017年3期)2017-06-23 08:11:21
智能系統學報(2015年4期)2015-12-27 09:38:35
機電產品開發與創新(2014年5期)2014-03-11 16:42:32
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:09
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
中國海洋大學學報(自然科學版)(2014年7期)2014-02-28 12:21:19
