基于海洋溢油溯源數(shù)值模擬方法的長島保護區(qū)污染風(fēng)險分析
2024-01-09 02:21:34陳勤思胡松魏永亮
海洋通報 2023年6期
陳勤思,胡松,魏永亮
(1.上海海洋大學(xué) 海洋生態(tài)系統(tǒng)與環(huán)境實驗室,上海 201306;2.上海海洋大學(xué) 海洋科學(xué)學(xué)院,上海 201306)
渤海是我國重要的石油產(chǎn)區(qū),也是重要的海上運輸通道。隨著海洋油氣業(yè)和海上運輸業(yè)的發(fā)展,渤海逐漸成為溢油污染事故的高發(fā)區(qū)。渤海海域分布著眾多海上石油平臺,石油開采過程中的泄漏和船舶事故引起的溢油污染事件時有發(fā)生,給區(qū)域海洋生態(tài)環(huán)境造成損害。柯麗娜等總結(jié)了渤海海域中來自船舶和石油平臺的溢油風(fēng)險源分布情況(圖1)[1]。此外,一些可能來源于石油管道滲油、沉船和非法傾倒等多種原因引發(fā)的溢油,常常因其來源不明而形成無主漂油,這類溢油的污染危害同樣不可小覷,需要對此進行風(fēng)險分析從而及時采取防污染的措施。
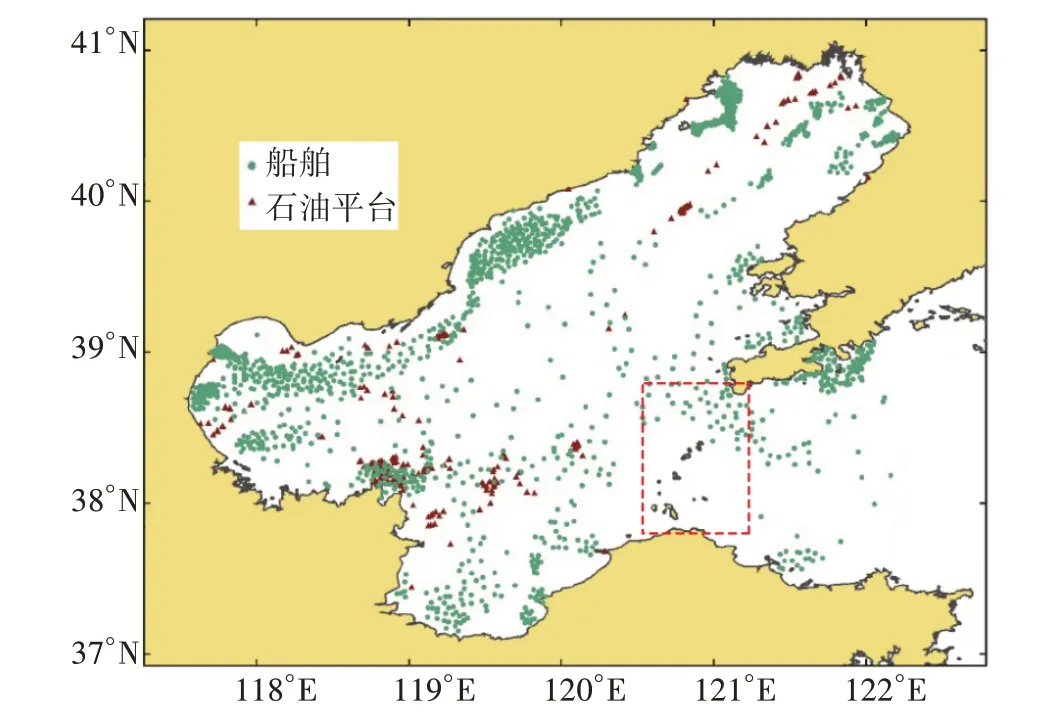
圖1 渤海海域溢油風(fēng)險源分布
山東長島國家級自然保護區(qū)(以下簡稱長島保護區(qū))是位于渤海海峽南部的國家級自然保護區(qū),具有重要的生態(tài)和旅游價值,是鳥類和太平洋斑海豹生存和繁殖的重要區(qū)域。但是,保護區(qū)海域時常受到來源不明的溢油污染物的影響[2-5],不僅給當(dāng)?shù)氐臐O業(yè)、旅游業(yè)等產(chǎn)業(yè)造成巨大損失,而且危及鳥類和斑海豹等保護物種的生存。溢油可能會隨著潮流、風(fēng)等到達(dá)保護區(qū)海域,也可能是海域內(nèi)的船舶泄漏造成,因此很難從溢油來源進行污染預(yù)測,給風(fēng)險分析帶來挑戰(zhàn)。
以往研究中,海洋溢油溯源數(shù)值模擬方法常常被用于解決一類污染受體已知、溢油源未知(或過多)情景的災(zāi)害預(yù)防問題,溯源方法在這類情景中所需要花費的計算時間少[6],并且可以提供更為全面的潛在溢油泄漏情景和污染物擴散軌跡信息[7-9]。不同于一些隨機和典型情景的溢油事故模擬方法[10-11],溯源方法從污染受體位置出發(fā)開始,采用溯源軌跡對溢油的可能來源進行追蹤,判斷可能對污染受體造成危害的溢油來源區(qū)域和概率,從而對高概率區(qū)域和低概率區(qū)域執(zhí)行相應(yīng)等級的監(jiān)測和預(yù)防措施[12]。Ciappa 等將該方法應(yīng)用在地中海的海洋保護區(qū)溢油風(fēng)險分析中,評估了該區(qū)域來自船舶的潛在污染風(fēng)險和溢油監(jiān)測的重點海域[8]。高松等基于該方法對秦皇島海域無主漂油的可能來源區(qū)域進行了估計,為溢油來源的排查和應(yīng)急處置提供了幫助[3,13]。位于渤海的長島保護區(qū)海域位置特殊,受到周期性變化的強潮流和季風(fēng)的共同影響,在進行溢油污染風(fēng)險分析時應(yīng)當(dāng)盡可能全面地考慮這些狀況。
本文采用海洋溢油溯源數(shù)值模擬方法對長島保護區(qū)海域進行溢油災(zāi)害風(fēng)險評估和分析。研究使用FVCOM模擬的潮流數(shù)據(jù)和ECMWF提供的ERA5海面10 m 風(fēng)數(shù)據(jù),在溢油模型GNOME (General NOAA Oil Modeling Environment)中進行溯源模擬。首先,通過一次真實溢油事故的后報驗證了溯源模擬方法的有效性,然后將這套資料和方法應(yīng)用于渤海長島保護區(qū)溢油災(zāi)害風(fēng)險的分析,評估了月平均統(tǒng)計條件下保護區(qū)溢油污染的來源分布和危害風(fēng)險,探討了該方法的適用性,以期為我國海洋溢油風(fēng)險評估相關(guān)的研究工作提供參考。
1 研究區(qū)域和數(shù)據(jù)
1.1 研究區(qū)域
渤海海峽是我國渤海的唯一出口,地理位置特殊。長島保護區(qū)海域位于渤海海峽南側(cè),自北向南與老鐵山水道、北砣磯水道和長山水道等主要航道相鄰。長島保護區(qū)海域受強潮流影響,海流多為東-西向往復(fù)流。區(qū)域盛行風(fēng)向隨季節(jié)轉(zhuǎn)換而有明顯變化,全年中春、秋、冬季的季風(fēng)強度較大且持續(xù)時間較長,夏季大風(fēng)天氣較少。
在長島保護區(qū)海域的三處位置周圍選取了66個位置并設(shè)置為污染受體地點,即圖2(b)中A、B和C 三處位置所示的受體點。對于A、B 和C 處的每一部分,相鄰受體點之間的距離是相等的。研究不設(shè)置潛在溢油事故的發(fā)生地點,油粒子從受體點位置釋放,隨時間逆向回溯其潛在的來源地點和粒子溯源軌跡。
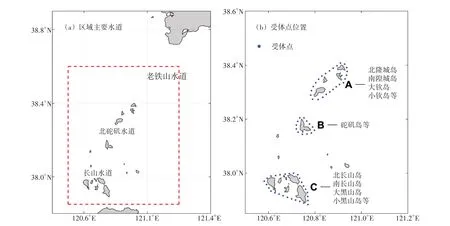
圖2 研究區(qū)域
1.2 數(shù)據(jù)
海面10 m 高的風(fēng)場數(shù)據(jù)來自ECMWF 提供的第五代大氣再分析產(chǎn)品ERA5再分析數(shù)據(jù)(https://cds.climate.copernicus.eu/#!/home)。該產(chǎn)品同化了衛(wèi)星數(shù)據(jù)、現(xiàn)場觀測數(shù)據(jù)等多種數(shù)據(jù),具有較高的精度。本文采用2000-2019年20年間的逐時風(fēng)場資料,空間分辨率為1/4°×1/4°。在風(fēng)險分析的研究部分,為體現(xiàn)保護區(qū)海域風(fēng)場季節(jié)性差異和多年平均狀態(tài),本文對數(shù)據(jù)進行了月平均的預(yù)處理。
蓬萊19-3 溢油事故的衛(wèi)星遙感圖像數(shù)據(jù)來自歐空局ENVISAT 衛(wèi)星ASAR(Advanced Synthetic Aperture Radar)圖像,并采用TCNNA(Texture-Classifying Neural Network Algorithm)算法[14]提取了圖像中油膜的范圍信息,與前人的研究結(jié)果較為一致[15-16]。為了驗證模型的可靠性,本文采用同一次溢油不同時刻的兩張衛(wèi)星圖像,以較晚時刻的圖像中獲得的溢油時間和位置信息作為溯源模擬的初始條件,以較早時刻的圖像中獲得的溢油時間和位置信息作為溯源模擬結(jié)果的驗證。
2 分析方法和模型設(shè)置
2.1 分析方法
受體模式(receptor mode)由Galt 等[17]提出并較早應(yīng)用于溢油溯源模擬中。受體模式基于拉格朗日觀點,將溢油視為以油粒子的形式運動,在溯源模擬中會根據(jù)平流方程,逆著洋流和海面風(fēng)作用方向,在時間上逆向反推油粒子的來源位置和溯源軌跡。在受體模式中,溢油受海流影響的輸運部分被簡化為位移,即油粒子代表的浮油隨著水體以拉格朗日方式運動:
式中:x代表油粒的位置;為表層海流速度。根據(jù)Galt 等的描述,風(fēng)的效應(yīng)和溢油粒子的擴散通過額外的方法模擬,溢油輸運的最終結(jié)果是矢量疊加的效果。Yu等[18]將這個過程表述為:
式(2)中:p(t)為監(jiān)測到的溢油粒子位置;p(t-1)表示僅受海流和風(fēng)影響下的前一時刻的位置;和uc(t-1)表示每個時間步長中由風(fēng)和海流引起的速度。式(3)中:R(t)表示隨機行走產(chǎn)生的距離半徑;uR()t-1為隨機行走的速度。式(4)中:St-1則表示由隨機行走造成的溢油粒子的可能影響范圍。通過式(2)和(4)可以得到溢油來源的高概率區(qū)域。
由于油粒子的隨機行走過程在溯源過程中是不可逆的,因此應(yīng)根據(jù)實際情況判斷回溯模擬的參數(shù)以滿足對當(dāng)?shù)丨h(huán)境特征的適用性。關(guān)于溯源模擬中的隨機行走帶來的問題可以參考以往研究[6,19]。
本文根據(jù)溢油溯源軌跡分析了可能對長島保護區(qū)造成污染危害的來源區(qū)域,以及來源區(qū)域的溢油到達(dá)保護區(qū)的概率分布。首先,在長島保護區(qū)海域的66 個受體點(圖2(b))釋放了用于溯源的油粒子,采用月平均的風(fēng)數(shù)據(jù)和隨時間變化的潮流數(shù)據(jù)模擬得到研究區(qū)域的溢油溯源軌跡。然后,從這些軌跡中分析可能對保護區(qū)造成污染影響的溢油來源位置,將這些信息按月合并在一起,最終得到了研究區(qū)域整體的概率圖。因此,概率圖展示了保護區(qū)周圍海域某一位置的溢油到達(dá)受體點的概率,其由穿過統(tǒng)計單元的油粒子軌跡數(shù)和由受體點釋放的油粒子間的比例組成[7]。本文標(biāo)記了概率圖中置信度為95%的區(qū)域。
2.2 動力模型及驗證
通過FVCOM 海洋模型模擬得到了渤海海域的潮流數(shù)據(jù)。FVCOM 是基于三維海洋原始方程的非結(jié)構(gòu)網(wǎng)格、有限體積的海洋模式[20],結(jié)合了有限元法擬合邊界、局部加密和有限差分法計算高效等優(yōu)點。本文建立了渤海三維正壓潮汐模型,模型共生成32 237 個三角元與17 173 個節(jié)點。為保證長島保護區(qū)海域網(wǎng)格質(zhì)量,對該海域進行了網(wǎng)格加密,使海域網(wǎng)格最高空間分辨率在100 m 以內(nèi)。模型開邊界由1/30°分辨率的TPXO9主要分潮的潮汐水位驅(qū)動[21-22],運行時間為2011 年4 月1 日至7 月31 日。此外,在風(fēng)險分析的研究部分采用模型模擬的5 月1 日至7 月1 日的潮流數(shù)據(jù),從而體現(xiàn)出研究區(qū)域漲落潮、大小潮等潮汐狀態(tài)下溢油溯源模擬的結(jié)果。
通過事故同期的潮汐資料對模型水動力模擬結(jié)果進行驗證,結(jié)果如圖3 所示。本文驗證了2011年6月7-12日P1位置潮位資料與2011年5月18日P2位置潮流資料,潮位與潮流的模式計算結(jié)果與事故同期實測資料的比對結(jié)果良好。
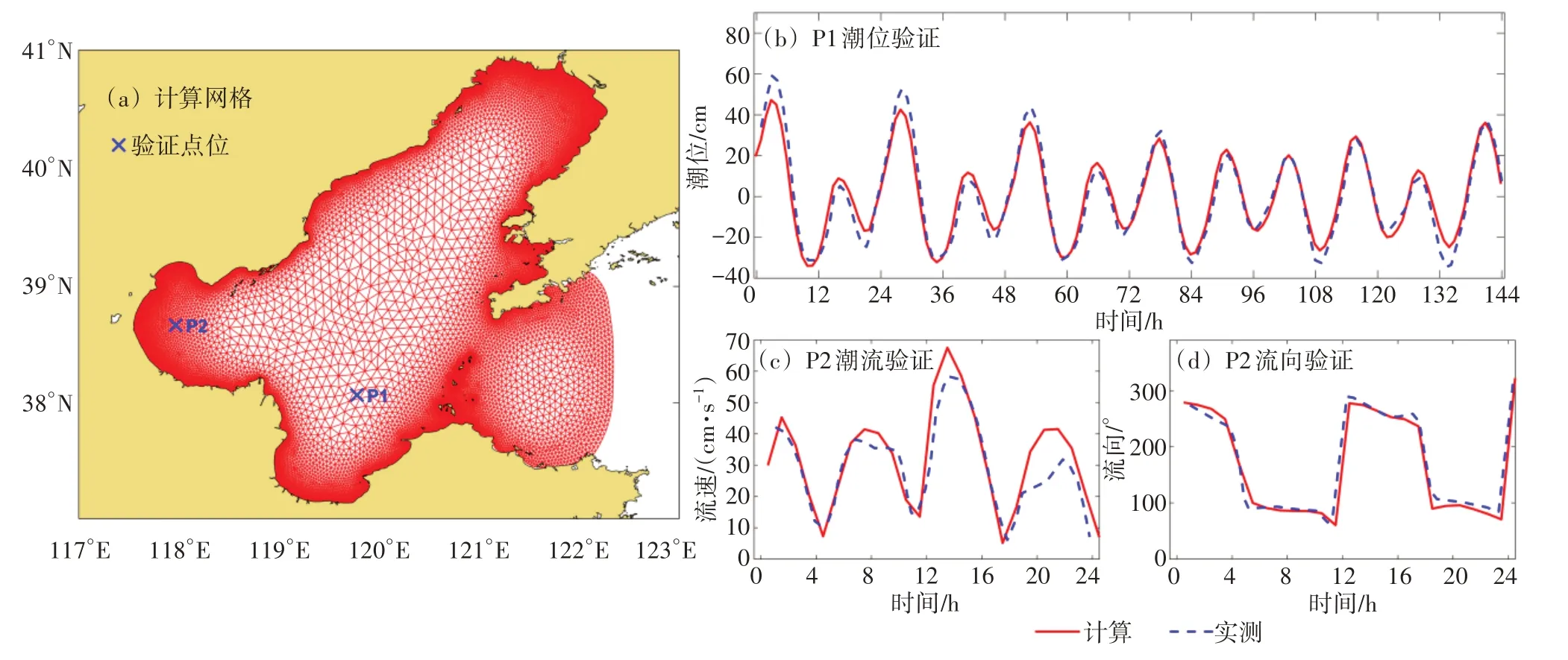
圖3 FVCOM 模式計算網(wǎng)格及驗證
2.3 溢油模型
GNOME 是美國國家海洋和大氣管理局(National Oceanic and Atmospheric Administration,NOAA)開發(fā)的溢油建模工具,可對溢油漂移和擴散軌跡進行預(yù)測[23]。GNOME 在診斷模式(diagnostic mode)下可輸出“最佳預(yù)測軌跡”和“最小遺憾軌跡”。前者默認(rèn)輸入信息完全正確,代表了對溢油去向的最佳判斷,后者在模型中包含不確定性,顯示可能受到溢油影響的更大區(qū)域。本文采用了“最小遺憾軌跡”模擬結(jié)果進行分析。
GNOME 自 早 期 版 本OSSM (On-Scene Spill Model)開始采用受體模式,并支持用于溢油溯源的“Run Backwards”模塊。在本文中,用于溯源模擬的油粒子是在圖2(b)所示的受體點位置釋放的。模型運行中設(shè)置的時間步長為30 min,每個受體點在一個時間步長釋放3 個油粒子,并在一個月中連續(xù)釋放15 日。不考慮油粒子風(fēng)化作用和歸宿,單個粒子在模擬中設(shè)置的有效時長為30日,即模擬時長超過30 日的粒子會被剔除。因此,模擬過程的整體有效模擬周期為45日。
3 結(jié)果與討論
3.1 模擬結(jié)果驗證
本研究首先對蓬萊19-3 油田溢油事故中溢油真實的漂移運動情況進行了后報,其目的是驗證數(shù)據(jù)和溢油溯源模擬方法的有效性,并確定符合本文研究區(qū)域環(huán)境特征的溢油溯源模擬的適用參數(shù)。蓬萊19-3 溢油事故最早發(fā)生于2011 年6 月4日,持續(xù)泄漏時間在2個月以上,約700桶原油和2 500 桶含油泥漿泄漏到海水中。6 月19 日,兩張不同時刻的衛(wèi)星圖像記錄了事故中溢油在海面的位置和分布情況,圖4(b)和圖4(c)展示了提取的溢油位置和范圍信息。
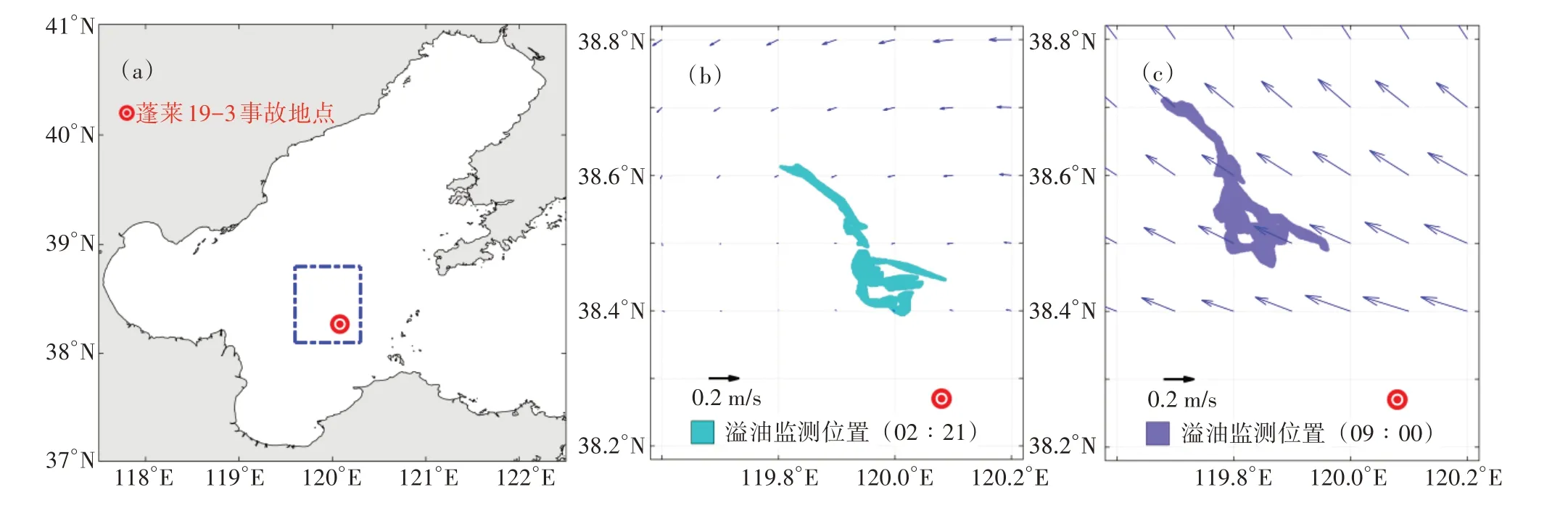
圖4 蓬萊19-3事故中不同時刻的溢油位置
以較晚時刻的圖像中獲得的溢油時間和位置信息作為模擬的初始條件(圖5(a)),溯源模擬的開始時刻為2011 年6 月19 日9 時0 分。以較早時刻的圖像中獲得的溢油時間和位置信息作為溯源模擬結(jié)果的驗證,模擬結(jié)束的時刻為2011 年6 月19 日2 時21 分。圖5(b)展示了本文采用的溢油溯源模擬參數(shù)方案在事故后報中得到的模擬結(jié)果,且與真實位置接近。結(jié)果表明本文的資料和方法可以在短期溯源模擬中得到較好的結(jié)果。
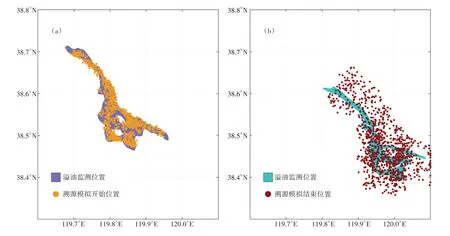
圖5 溢油事故溢油溯源模擬結(jié)果
由于污染風(fēng)險分析采用溯源方法評價的研究尚不多見,對于溯源模擬結(jié)果的精度評價案例相對較少。因此,本文在表1 中給出了通過此次模擬所優(yōu)化后的相關(guān)參數(shù)取值。在GNOME 中,各種輸入項的不確定性部分可以設(shè)置為一個區(qū)間內(nèi)的隨機值。比如,風(fēng)漂移系數(shù)默認(rèn)在1%~4%中取值,并且該值會每15 min重置一次。
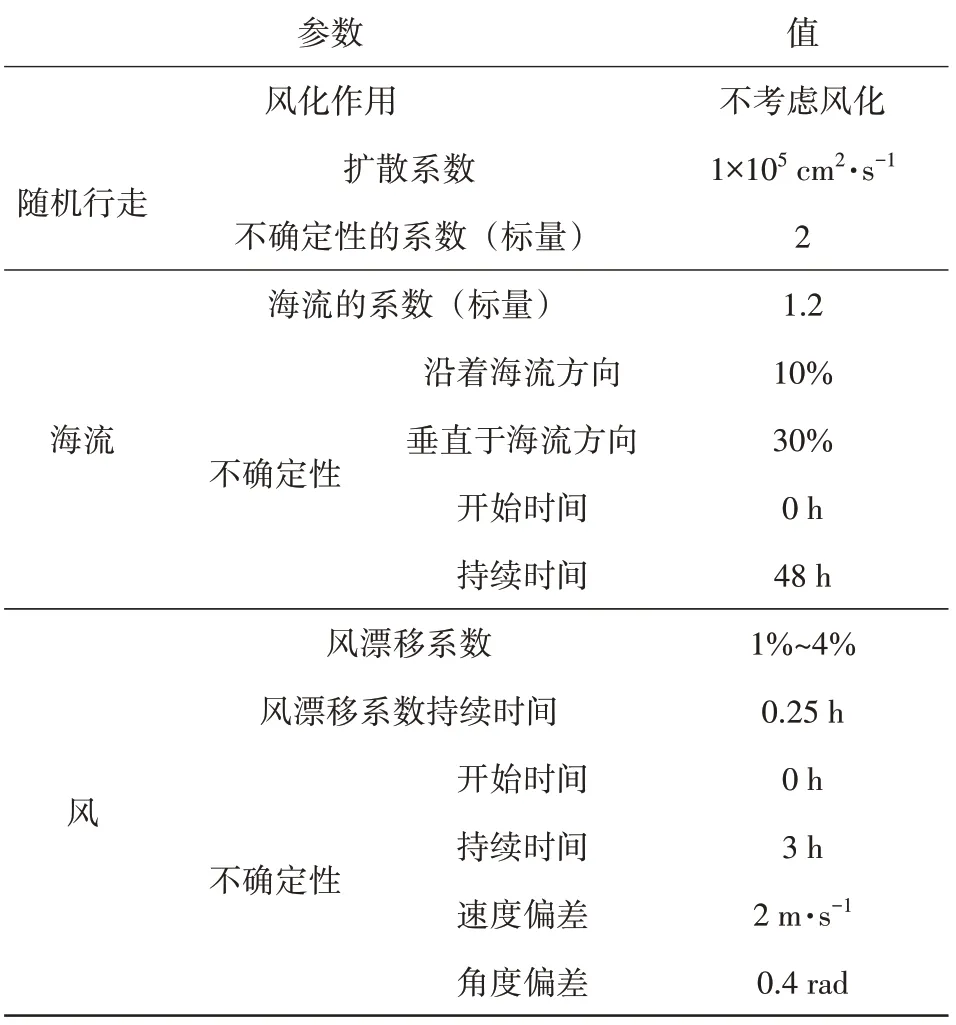
表1 溯源模擬中相關(guān)參數(shù)取值
3.2 溢油概率分布模擬
GNOME 以月平均的風(fēng)數(shù)據(jù)和隨時間變化的潮流數(shù)據(jù)作為驅(qū)動,在圖2(b)所示的受體點位置釋放了用于溯源的油粒子,每個受體點每日的釋放頻率為144 個,一個月中連續(xù)釋放時長為15 日,每個粒子的有效模擬時長為30 日。然后,從66×144×45 條溯源軌跡中得到可能對保護區(qū)造成污染影響的溢油來源位置,這些信息按月合并在一起,最終得到了研究區(qū)域整體的概率圖。
溯源軌跡的概率圖顯示了保護區(qū)周圍海域某一位置的溢油到達(dá)保護區(qū)造成污染的概率。圖6不同顏色的區(qū)域表示了對應(yīng)位置溢油的污染概率,黑色實線標(biāo)記了圖中置信度為95%的區(qū)域。結(jié)果表明,①受強潮流作用影響,區(qū)域內(nèi)東-西走向的往復(fù)流運動使東岸和西岸的區(qū)域周圍常年表現(xiàn)為高概率區(qū)域,也使保護區(qū)內(nèi)島嶼的東西兩岸更容易受到溢油污染物的影響。②受季節(jié)性變化的典型風(fēng)場影響,高概率區(qū)域的主要分布態(tài)勢呈現(xiàn)出較為明顯的季節(jié)性差異。高概率區(qū)域的分布形態(tài)在夏季向東南方向延伸,對應(yīng)季節(jié)中盛行東南風(fēng),在冬季向西北方向延伸,對應(yīng)季節(jié)中盛行西北風(fēng)。春夏季節(jié),保護區(qū)內(nèi)島嶼更容易受到東部和南部海域溢油污染的影響,在對應(yīng)季節(jié)中溢油可能在島嶼的東部和南部更早被發(fā)現(xiàn),而在溢油污染事件多發(fā)的秋冬季節(jié),保護區(qū)內(nèi)島嶼更容易受到來自西北方向溢油的污染影響,季風(fēng)會導(dǎo)致來自渤海中部及北部海域的油污更容易到達(dá)保護區(qū),這可能是在保護區(qū)內(nèi)島嶼的西海岸往往更早發(fā)現(xiàn)溢油的原因。③在表2 中給出了置信度為95%區(qū)域的風(fēng)險分析表,從區(qū)域的分布來看,受主導(dǎo)風(fēng)向、往復(fù)流的共同影響,在1-2 月以及9-12 月,保護區(qū)周圍的高概率區(qū)域向保護區(qū)北部延伸,分布面積較大,并在12 月達(dá)到最大。而在4-8 月保護區(qū)南部的近岸部分成為高概率區(qū)域,分布面積較小。高概率區(qū)域的覆蓋面積表現(xiàn)為春夏季節(jié)較小、秋冬季節(jié)較大的特征。

表2 溢油污染風(fēng)險分析
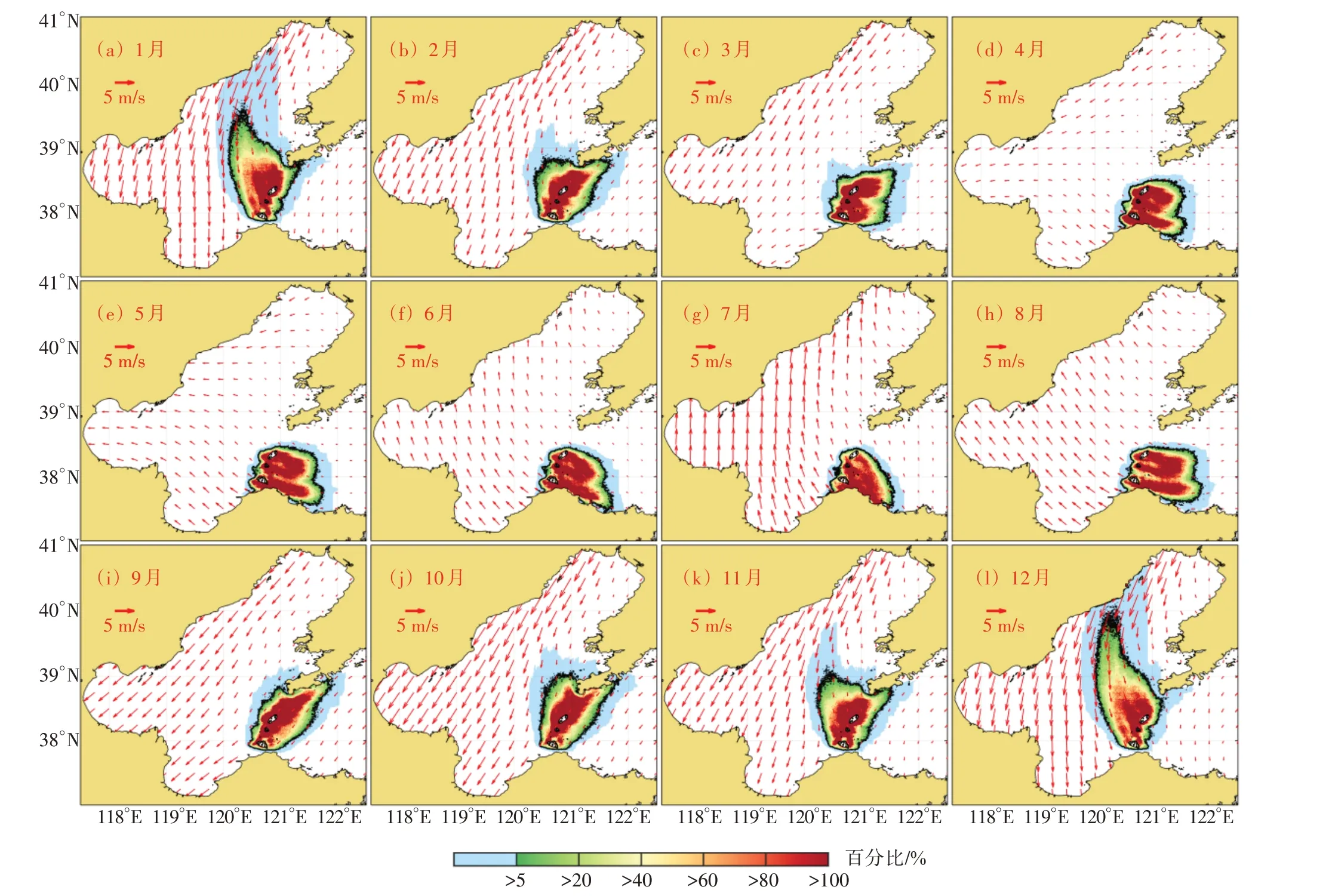
圖6 月平均條件下長島保護區(qū)海域溢油溯源模擬結(jié)果的概率圖
4 結(jié)論
本文基于海洋溢油溯源數(shù)值模擬方法,評估月平均統(tǒng)計條件下長島保護區(qū)海域整體污染危害風(fēng)險,分析可能對保護區(qū)造成危害的來源區(qū)域及其溢油對保護區(qū)造成污染影響的概率等信息。模擬結(jié)果表明,①受到長島保護區(qū)海域強潮流作用和主導(dǎo)風(fēng)向的顯著影響,高概率區(qū)域的分布常年表現(xiàn)為東-西走向的分布態(tài)勢,并在夏季向東南方向延伸,最遠(yuǎn)可延伸至山東煙臺市北岸;在冬季向西北方向延伸,最遠(yuǎn)可延伸至渤海中部和北部。②高概率區(qū)域的區(qū)域面積表現(xiàn)為春夏季節(jié)較小、秋冬季節(jié)較大的特征。溢油污染的最大風(fēng)險出現(xiàn)在冬季。
猜你喜歡
今日農(nóng)業(yè)(2021年9期)2021-11-26 07:41:24
小學(xué)科學(xué)(學(xué)生版)(2021年7期)2021-07-28 06:44:32
發(fā)明與創(chuàng)新·小學(xué)生(2021年3期)2021-03-25 11:48:49
小學(xué)科學(xué)(學(xué)生版)(2020年6期)2020-08-13 07:47:12
當(dāng)代陜西(2019年7期)2019-04-25 00:22:18
領(lǐng)導(dǎo)決策信息(2018年26期)2018-10-12 02:18:26
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
都市麗人(2015年5期)2015-03-20 13:33:49
