“機器人技術”課程授課方法與考評體系設置研究
2015-12-10 21:09:24王新慶高娟崔學政趙學進吳寶貴
教育教學論壇 2015年14期
關鍵詞:實踐教學
王新慶 高娟 崔學政 趙學進 吳寶貴
摘要:針對“機器人技術”課程授課效果不理想的現狀,本文提出了一種基于實踐與項目創新的課程體系,并對相應的考評方法進行了研究。該授課方法以小組為單位,以學生的自我導向式理論學習方法為基礎;采用軟件仿真與實驗相結合的理實一體化授課方法,強化實踐教學環節;引入以項目設計為載體的創新能力培養方法,以深化理論知識,提高學生的創新精神與實踐能力。
關鍵詞:計算機仿真;實踐教學;考核方式
中圖分類號:G642.0 文獻標志碼:A 文章編號:1674-9324(2015)14-0162-02
“機器人技術”是一門工科類院校普遍開設的公選課程,對激發學生的求知欲、培養學生的創新性思維具有重要作用。然而,一直以來教師往往采用“灌輸”式的教學方法,學生被動接受[1];理論教學和實踐教學分別在兩個不同的空間和時間完成,學生往往“就題論題”,而到了實際運用時完全不知道與實際問題的關聯,再加上考核方式較為單一,很難考察學生的綜合素質,也很容易“埋沒”一部分具有特長的學生,更無法選拔優秀學生。
一、課程教學內容體系改革
本文之所以選擇“機器人技術”中相關的內容為載體開展研究,是因為對于工科學生來說機器人是最引人入勝的,兼具理論與實踐。課程授課方法主要涵蓋三方面內容:課堂講授環節、實踐教學環節、項目創新設計及評比展示環節。
1.課堂講授環節。為了克服傳統教學采用的“灌輸式”授課方法,本文采用以學生為主體的自我導向式學習方法,從而既能夠兼顧不同學生的學習速度又允許學生在自己感興趣的方向上深入探索。在常規講課的基礎上,引入兩個模式:(1)個人專題模式。讓學生講解自己感興趣的機器人,培養學生查閱資料、歸納總結的能力,鍛煉學生的口頭表達能力。通過該方法可以彌補課程教材的滯后,豐富教學內容,也有利于保持學生的興趣。每次課講15分鐘。該部分成績將作為期末考評的一部分。(2)小組競爭模式。課堂上提出問題,問題主要圍繞每次課的重點內容,小組討論得出答案,由于答案能夠在不同的小組之間及時分享,有利于形成一種小組內的協作氛圍。
2.實踐教學環節。由于機器人技術中理論較為抽象,學生普遍反映內容枯燥,與機器人無法建立直觀的聯系。因此,本文通過實際工程應用的剖析、講解幫助學生建立設計思維,為開展“項目創新設計環節”做準備。具體采用兩種方法實施:(1)基于軟件仿真方法。軟件仿真在工程中的應用越來越廣泛,相比于單純的理論講解,可以直觀動態地進行演示,又彌補了單純采用多媒體靈活性差的問題,能夠極大地提高學生的認知感受性[2]。以常用的工程軟件為主,例如SOLIDWORKS、MATLAB等,涵蓋了三維造型、控制仿真等。針對不同章節,本文擬編制相應的演示程序,通過現場調參,深化理論知識。演示程序見表1。
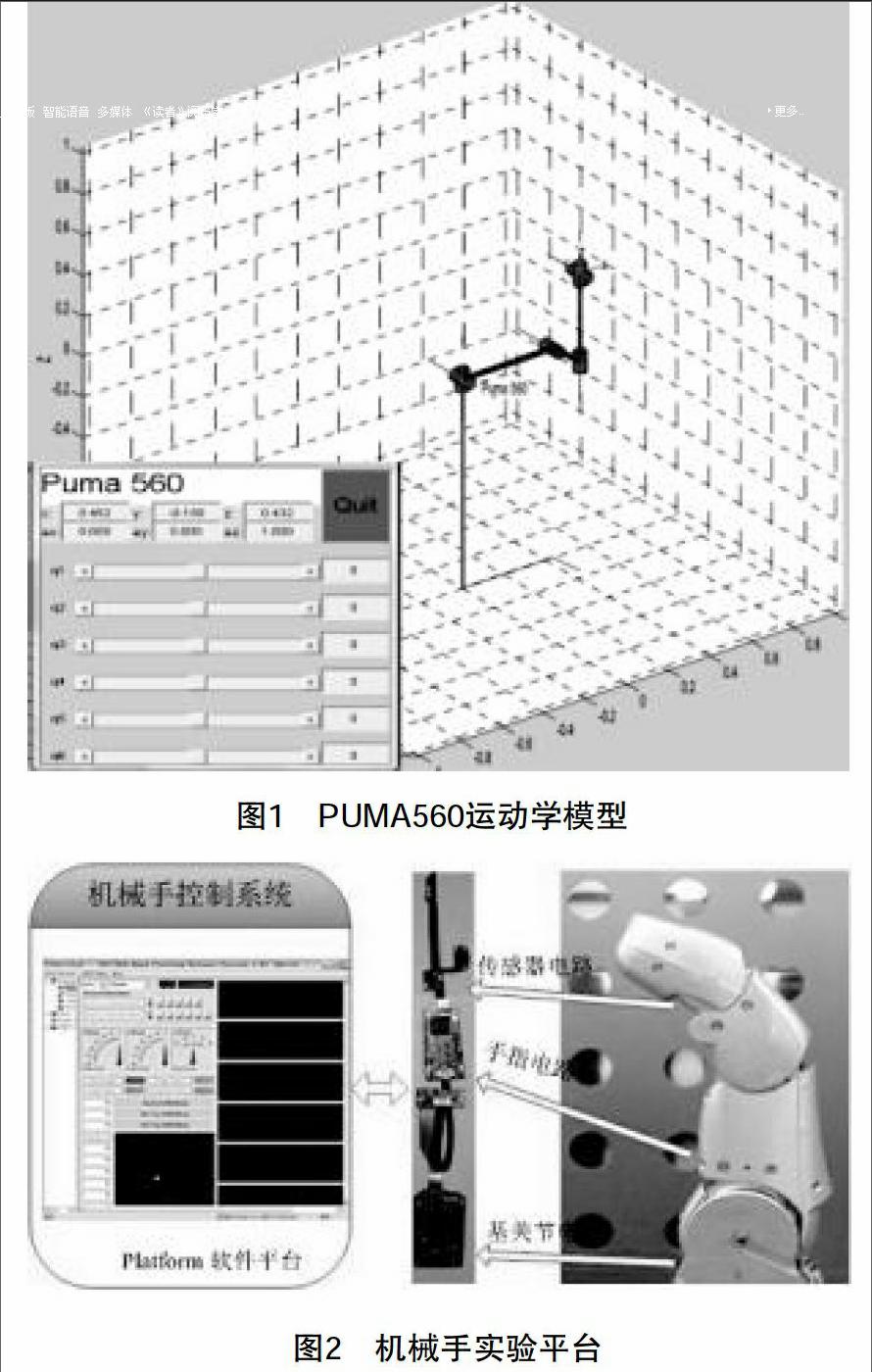
軟件仿真主要基于MATLAB Robotics Toolbox[3],該工具箱由Peter Corke開發,集成了典型機器人的模型,例如:SCARA,PUMA560等不同坐標形式的機器人,并針對坐標變換、正/逆運動學、動力學、軌跡規劃等編制了相應的M函數,進而可以通過可視化、交互式控制界面方便地進行機器人的建模及教學演示。以PUMA560機器人的運動學為例,只需輸入PUMA560,drivebot(p560)等簡單命令即可生成PUMA560的運動學模型,并可以實現如圖1所示的滑塊實時驅動方式。(2)基于實物演示方法。為了更為直觀地理解機器人的控制方法,本文搭建一套仿人機械手的控制平臺,見圖2。試驗平臺為三關節仿人靈巧手指[4],該手指可以簡化為三連桿串聯關節機器人,該手指采用直流無刷電機驅動,各關節處集成位置及力矩傳感器,可以提供位置/力控制或力/位混合控制所需的信息。該機械手指以FPGA/DSP為主控芯片,以基于PC機的Platform為軟件平臺,通過C語言編程實現不同的控制方法,并能夠實時顯示各傳感器信息。
在該平臺基礎上,結合不同章節的內容,安排了如表2所示的演示實驗。
3.項目創新設計及評比展示環節。如何充分發揮每個學生的優勢,協作完成一個機器人系統,對培養學生的協作能力、溝通能力具有重要的意義。考慮到不同專業學生的先修知識不同,本文在項目設計階段分為兩個層次:基礎層次(機器人控制)與創新層次(自主設計機器人系統)。(1)基礎層次。需要學生基于現有的硬件試驗平臺完成一項機器人控制實驗。實驗平臺為圖2所示。(2)創新層次。需要學生獨立完成一項與機器人有關的設計,該設計可以采用現有的模塊搭建一套原理樣機;也可以完成一項機器人項目的原理驗證、理論計算及撰寫研究報告等。完成該層次的學生一般具有一定的創新潛力。教師需要對選題進行預審,因為難度過大的設計會影響學生的積極性。對本文選題主要圍繞機器人結構的創新設計、傳感器應用、數據采集算法編程及基本的位置/力控制編程等。
二、課程考核方式
將考核分解到日常教學中,既包括課堂知識,又涵蓋一定的課外知識;既包括理論,又強調實踐。具體成績分配如下:(1)兩次隨堂測驗(每次占20%);(2)5次課下作業(30%);(3)5篇外文文獻閱讀,并就其中的一篇作口頭報告(10%);(4)團隊合作設計項目研究報告/答辯(20%);其中,團隊合作項目要求為:不少于8分鐘的項目研究匯報、不少于5頁的研究性論文。具體評分方法如下:由于每個學生在項目中的貢獻不同,因此對其成績的評定也應當有差別。擬采用組間互評及小組內互評的方法。組間互評采用五分制,評分依據見表3。
組間評分將作為小組內成員的基本得分,在此基礎上采用組內互評的方法來區別各組員的得分;按照名次給予階梯性的分差。設置的問題如下:(1)參與項目的動力有多大?(2)動手能力有多大?(3)在項目中的創新性貢獻有多大?
三、教學改革授課效果的評價方法
一門課程改革是否有效,對授課效果的評價是重要的衡量標準。本文擬采用調查問卷的形式,設置的問題如表4:
四、結束語
通過本文提出的課程體系及考核方式改革將有助于推動學生發展更為嚴謹的學習態度,提高自主學習及解決問題的能力,以更大的熱情投入到學習中去,后期將通過課程的具體實施檢驗本文所提出的方法。
參考文獻:
[1]張瑜.大學生公共選修課的現狀調查及對策研究[J].中國電力教育,2011,(09):197-199.
[2]N. Rutten,W. R. van Joolingen,J. T. van der Veen. The Learning Effect of Computer Simulations in Science Education[J]. Computers & Education,2012(58):136-153.
[3]P.I.Corke. Robotics,Vision & Control [M]. Springer,2011.
[4]樊紹巍.類人型五指靈巧手的設計及抓取規劃研究[D].哈爾濱工業大學博士學位論文,2009.
猜你喜歡
中國科技博覽(2016年19期)2016-10-19 14:32:01
中國市場(2016年35期)2016-10-19 03:11:23
中國市場(2016年35期)2016-10-19 02:58:48
科技視界(2016年21期)2016-10-17 17:25:51
考試周刊(2016年79期)2016-10-13 23:35:16
考試周刊(2016年79期)2016-10-13 23:26:02
大學教育(2016年9期)2016-10-09 08:49:28
大學教育(2016年9期)2016-10-09 08:46:17
大學教育(2016年9期)2016-10-09 08:34:10
大學教育(2016年9期)2016-10-09 08:17:37
