基于OBE理念的體教乒乓球?qū)m?xiàng)課程改革研究
2019-09-10 07:51:58沈磊
科教導(dǎo)刊 2019年27期
關(guān)鍵詞:教學(xué)改革
沈磊
關(guān)鍵詞 體教乒乓球?qū)m?xiàng)課 OBE教育理念 教學(xué)改革
中圖分類(lèi)號(hào):G424 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文獻(xiàn)標(biāo)識(shí)碼:A ? DOI:10.16400/j.cnki.kjdkx.2019.09.073
Abstract Based on the OBE education concept, the reform of the special table tennis course for physical education majors mainly focuses on the learning outcomes of students, improves the existing teaching system of table tennis courses in physical education majors, and constructs a series of evaluation and evaluation systems based on students' learning outcomes. To improve students' professional skills and comprehensive quality, effectively improve the teaching effect of the table tennis course for physical education majors, and better cultivate the physical education professionals required by the society.
Keywords physical education table tennis special course; OBE education concept; teaching reform
當(dāng)今時(shí)代飛速發(fā)展,教育的質(zhì)量與效果受到高校教育者與社會(huì)人士的廣泛關(guān)注。專(zhuān)業(yè)型人才的傳統(tǒng)培養(yǎng)模式受到先進(jìn)教育理念的沖擊,作者主要從體育教育專(zhuān)業(yè)入手,在傳統(tǒng)教學(xué)模式下,體育教育乒乓球?qū)m?xiàng)的學(xué)生專(zhuān)業(yè)技術(shù)方面有所提高,但是在體育教學(xué)實(shí)踐方面卻出現(xiàn)不同層次的差異,知識(shí)輸出能力明顯不足。尤其是在社會(huì)飛速發(fā)展,對(duì)人才的綜合實(shí)踐能力需求日益增強(qiáng)的背景下,不進(jìn)行教學(xué)方式的探索與創(chuàng)新,就難以發(fā)揮出更好的教學(xué)效果。
OBE(Outcome-Based Education,簡(jiǎn)稱(chēng)OBE)教育理念最早是在20世紀(jì)90年代由歐美國(guó)家在基礎(chǔ)教育改革中提出來(lái)的一種基于學(xué)習(xí)成果的教育模式,之后被廣泛應(yīng)用于教育領(lǐng)域。作為一種比較先進(jìn)的教育理念,成果導(dǎo)向教育模式將其核心放在了教育的“產(chǎn)出”上,即學(xué)生在學(xué)習(xí)結(jié)束時(shí)能做到什么,而不是教學(xué)過(guò)程中教師講授了什么。強(qiáng)調(diào)了專(zhuān)業(yè)課程的建設(shè)必須要圍繞“最終成果”來(lái)反向設(shè)計(jì),體育教育專(zhuān)業(yè)乒乓球?qū)m?xiàng)生通過(guò)專(zhuān)業(yè)的課程學(xué)習(xí)應(yīng)達(dá)到熟知乒乓球領(lǐng)域?qū)I(yè)的知識(shí),較高的專(zhuān)業(yè)技術(shù)才能和優(yōu)秀的教學(xué)實(shí)踐能力。本文將通過(guò)把OBE教育理念融入到體教乒乓球?qū)m?xiàng)課程改革中去,優(yōu)化課程內(nèi)容,開(kāi)展考核評(píng)價(jià)體系,尋找提高體教乒乓球?qū)m?xiàng)課教學(xué)質(zhì)量的課程模式,向培養(yǎng)出更適應(yīng)社會(huì)需求的綜合型人才的方向努力。
1 基于OBE理念的體教乒乓球課程改革的必要性
1.1 研究現(xiàn)狀
筆者通過(guò)查閱文獻(xiàn)了解到袁紹輝的《體育專(zhuān)業(yè)學(xué)生“乒乓球”課程改革實(shí)踐研究》提出傳統(tǒng)課程忽略了學(xué)生在乒乓球項(xiàng)目上的職業(yè)能力素質(zhì)的培養(yǎng),要從課程體系、教學(xué)方法、教學(xué)手段和教學(xué)側(cè)重點(diǎn)等方面全面對(duì)乒乓球課程進(jìn)行改革和實(shí)踐,提升學(xué)生的創(chuàng)新思維與創(chuàng)新能力。劉昳的《研究性學(xué)習(xí)在體育院校體育教育專(zhuān)業(yè)乒乓球?qū)P拚n的實(shí)驗(yàn)研究》對(duì)研究性學(xué)習(xí)在體育院校體育教育專(zhuān)業(yè)乒乓球?qū)P拚n的實(shí)施條件進(jìn)行了實(shí)驗(yàn)分析,并對(duì)比闡述了研究性學(xué)習(xí)方式的優(yōu)勢(shì)。李曉川的《OBE理念下高職動(dòng)態(tài)課程教學(xué)模式改革研究》提出了高校課程模式改革的原則和思路。這些都說(shuō)明課程要與時(shí)代的發(fā)展相接軌,與先進(jìn)的教育理念相融合。國(guó)外對(duì)于OBE理念的研究和應(yīng)用相對(duì)來(lái)說(shuō)比較成熟,而國(guó)內(nèi)的研究比較少一些,現(xiàn)在還處于探索階段,成果較少,很多方面和學(xué)科都沒(méi)有接觸到。尤其是體教專(zhuān)業(yè)的課程與OBE教育理念的結(jié)合的研究少之又少,所以本研究對(duì)于專(zhuān)業(yè)型人才的培養(yǎng)具有非常重要的意義。
首先,社會(huì)對(duì)體育教育專(zhuān)業(yè)人才的需求增大,同時(shí)要求也提高,必須具備良好的專(zhuān)業(yè)知識(shí)與技能,還要有豐富的教學(xué)實(shí)踐能力和專(zhuān)業(yè)創(chuàng)新能力。基于OBE教育理念的體教乒乓球?qū)m?xiàng)課程改革的研究,實(shí)現(xiàn)了學(xué)習(xí)主體的轉(zhuǎn)變,有利于促進(jìn)高校體育教育專(zhuān)業(yè)的教學(xué)改革,提供寶貴經(jīng)驗(yàn)。其次,本研究也考察了提高體教專(zhuān)業(yè)學(xué)生的教學(xué)實(shí)踐能力和創(chuàng)新能力的方法,為專(zhuān)業(yè)型人才的培養(yǎng)提供了思路。
以O(shè)BE教育理念的人才培養(yǎng)目標(biāo)的實(shí)現(xiàn)為根本,反向設(shè)計(jì)培養(yǎng)出具有豐富教學(xué)實(shí)踐能力與創(chuàng)新能力的綜合型專(zhuān)業(yè)教育人才,有利于找出體教專(zhuān)業(yè)乒乓球?qū)m?xiàng)生教育實(shí)踐能力培養(yǎng)和創(chuàng)新能力培養(yǎng)的現(xiàn)實(shí)問(wèn)題,提出有效科學(xué)的改進(jìn)方法,從而進(jìn)一步完善課程體系,加強(qiáng)專(zhuān)業(yè)教育人才的培養(yǎng)。
1.2 現(xiàn)階段乒乓球?qū)m?xiàng)課的不足
以往的體教乒乓球?qū)m?xiàng)課程在學(xué)生的專(zhuān)業(yè)理論知識(shí)和基礎(chǔ)技術(shù)動(dòng)作的掌握上比較重視,忽視了學(xué)生在教學(xué)實(shí)踐能力與專(zhuān)業(yè)創(chuàng)新能力上的培養(yǎng)。[1]導(dǎo)致體教乒乓球?qū)m?xiàng)畢業(yè)生不能很好的適應(yīng)社會(huì)的需求,快速融入到工作中。所以提升體教專(zhuān)業(yè)乒乓球?qū)m?xiàng)生的教學(xué)實(shí)踐能力和專(zhuān)業(yè)創(chuàng)新能力對(duì)學(xué)生,對(duì)學(xué)校和社會(huì)都有著重要的意義。
2 OBE教育理念及其內(nèi)涵
OBE(Outcome Based Education)教育理論最早是美國(guó)教育學(xué)者Spady提出的,1994年,Spady親自指出成果為本的教育意思是把教育系統(tǒng)中的一切都集中圍繞著所有學(xué)生在學(xué)習(xí)結(jié)束時(shí)必須能做到的去組織。首先要清晰地確定學(xué)生能做到什么是重要的,然后去組織課程、教學(xué)還有評(píng)核體系,以確保所希望的學(xué)習(xí)最終能夠發(fā)生。[2]即把學(xué)生的學(xué)習(xí)成果作為教學(xué)的出發(fā)點(diǎn)和最終目標(biāo),并以此來(lái)組織教學(xué),進(jìn)行課程設(shè)計(jì),并對(duì)學(xué)習(xí)成果進(jìn)行評(píng)價(jià)和檢測(cè)以及對(duì)教學(xué)過(guò)程進(jìn)行調(diào)整。在學(xué)生的學(xué)習(xí)成果上,學(xué)校比學(xué)生更應(yīng)該為學(xué)習(xí)的成效負(fù)責(zé)。它關(guān)注的是學(xué)生學(xué)習(xí)之后的學(xué)習(xí)產(chǎn)出的能力,學(xué)生在學(xué)習(xí)之后獲得了什么,學(xué)習(xí)得到的成果是否能夠幫助學(xué)生獲得成功,它主張成功是成功之母,傳統(tǒng)教育的教學(xué)內(nèi)容并不等于學(xué)習(xí)成果。[3]
3 基于OBE理念的體教乒乓球課程改革的實(shí)施
通過(guò)對(duì)湖北省高校的體教專(zhuān)業(yè)的乒乓球教師和教授,省隊(duì)教練等進(jìn)行訪談,汲取意見(jiàn)建議,并以O(shè)BE教育理念下的體教乒乓球?qū)m?xiàng)課程為研究對(duì)象,以武漢體育學(xué)院體教專(zhuān)業(yè)14級(jí)乒乓球?qū)_x生為實(shí)驗(yàn)對(duì)象通過(guò)教學(xué)實(shí)驗(yàn)法和邏輯分析法進(jìn)行了研究。
3.1 OBE教育理念實(shí)施要點(diǎn)
成果導(dǎo)向教育的實(shí)施要點(diǎn):
確定理想的學(xué)習(xí)成果。最終學(xué)習(xí)成果既是它的終點(diǎn)也是課程設(shè)計(jì)的起點(diǎn)。學(xué)習(xí)成果是指經(jīng)過(guò)學(xué)習(xí)之后需要達(dá)到的理想成果,包括知識(shí)、能力和素質(zhì)。[4]
構(gòu)建課程體系。即設(shè)計(jì)對(duì)齊學(xué)習(xí)成果的課程、教學(xué)以及評(píng)核。要求學(xué)生所達(dá)到的能力中,每一種能力都要有所對(duì)應(yīng)的課程來(lái)支撐。老師教了不一定學(xué)生就學(xué)了,一定要以學(xué)生經(jīng)過(guò)學(xué)習(xí)后所能達(dá)到哪些能力來(lái)確定學(xué)生的學(xué)習(xí)成果。課程的設(shè)置與學(xué)生的能力結(jié)構(gòu)要求體現(xiàn)映射關(guān)系,對(duì)齊學(xué)生學(xué)習(xí)成果的教學(xué)及評(píng)價(jià)。[5]
利用成果評(píng)價(jià)數(shù)據(jù)來(lái)改善課程。根據(jù)每個(gè)學(xué)生的不同來(lái)采用多元和多層系的評(píng)價(jià)標(biāo)準(zhǔn),聚焦于學(xué)生學(xué)習(xí)成果的內(nèi)涵和個(gè)人的學(xué)習(xí)進(jìn)步。通過(guò)評(píng)核學(xué)生達(dá)到預(yù)設(shè)學(xué)習(xí)成果的成效以作改善和問(wèn)責(zé)的用途。
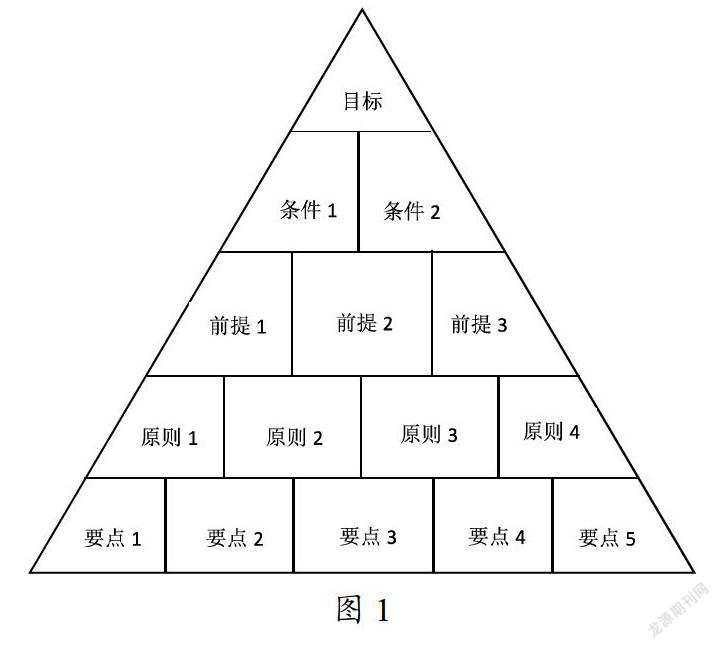
逐級(jí)達(dá)到頂峰。把學(xué)生的學(xué)習(xí)成果劃分為不同的階段,確定出每個(gè)階段的學(xué)習(xí)目標(biāo),這些目標(biāo)是從初級(jí)、中級(jí)、高級(jí)最終到頂峰成果。所以擁有不同學(xué)習(xí)能力的同學(xué),通過(guò)不同的時(shí)間到最后都能達(dá)到同一目標(biāo)。框架如圖1。[6]
其中一個(gè)目標(biāo)就是:頂峰成果。兩個(gè)條件是:創(chuàng)設(shè)成功環(huán)境和描繪成果藍(lán)圖。三個(gè)關(guān)鍵前提是:(1)所有學(xué)生通過(guò)學(xué)習(xí)均能達(dá)成預(yù)期成果;(2)成功是成功之母;(3)學(xué)校對(duì)學(xué)生的成功學(xué)習(xí)負(fù)責(zé),學(xué)校掌握著成功學(xué)習(xí)的機(jī)會(huì)與條件,直接影響學(xué)生能否成功學(xué)習(xí)。四個(gè)原則是:清楚聚焦、擴(kuò)大機(jī)會(huì)、提高期待和反向設(shè)計(jì)。五個(gè)實(shí)施要點(diǎn)是:確定學(xué)習(xí)成果、構(gòu)建課程體系、確定教學(xué)策略、自我參照評(píng)價(jià)和逐級(jí)達(dá)到頂峰。[7]
通過(guò)文獻(xiàn)資料的整理和對(duì)幾位乒乓球教師、教授以及省隊(duì)主管教練的訪談,明確了體育教育專(zhuān)業(yè)乒乓球?qū)_x生在通過(guò)學(xué)習(xí)之后應(yīng)該達(dá)到的學(xué)習(xí)成果。具體如下:
(1)專(zhuān)業(yè)理論知識(shí)包括:乒乓球的裁判與競(jìng)賽規(guī)則,一些參賽戰(zhàn)術(shù),專(zhuān)業(yè)動(dòng)作技能表現(xiàn)的關(guān)鍵因素,乒乓球技能動(dòng)作的力學(xué)原理,教學(xué)原則,背景與起源等。
(2)專(zhuān)業(yè)技術(shù)方面:前沖弧圈球,加轉(zhuǎn)弧圈球,正反手?jǐn)[速,推側(cè)撲,發(fā)球搶攻戰(zhàn)術(shù)等。
(3)能力素質(zhì)方面:掌握體育教學(xué)的基本理論與方法,豐富的教學(xué)實(shí)踐能力,清晰準(zhǔn)確的口頭表達(dá)能力,知識(shí)輸出能力和教學(xué)研究與創(chuàng)新能力。
3.3 課程的實(shí)施
OBE教育理念下的體教乒乓球?qū)m?xiàng)課程,是根據(jù)最終的學(xué)習(xí)成果來(lái)反向設(shè)計(jì),確定課程內(nèi)容,教學(xué)模式,致力于學(xué)生最終學(xué)習(xí)成果的獲得。對(duì)于課程中能夠幫助學(xué)生達(dá)到頂峰成果的內(nèi)容必須保留,而對(duì)于課程中其他與學(xué)生學(xué)習(xí)成果關(guān)聯(lián)很小的則可能需要考慮刪去。[8]
對(duì)于2014級(jí)體育教育專(zhuān)業(yè)的乒乓球?qū)m?xiàng)生,乒乓球?qū)I(yè)技術(shù)是極其重要的,這方面的提高離不開(kāi)一定時(shí)間量的練習(xí)。所以從專(zhuān)業(yè)技術(shù)方面2014級(jí)體育教育乒乓球?qū)_x班學(xué)生的課程由之前的一個(gè)學(xué)期36個(gè)課時(shí)增加到了72個(gè)課時(shí),技術(shù)練習(xí)課由原來(lái)的32個(gè)課時(shí)增加到60個(gè)課時(shí),專(zhuān)業(yè)理論知識(shí)方面乒乓球理論知識(shí)課由原來(lái)的4個(gè)課時(shí)增加到12個(gè)課時(shí)。在上技術(shù)練習(xí)課的同時(shí),增加理論知識(shí)的了解,能夠幫助學(xué)生比較清晰的認(rèn)識(shí)到每一個(gè)技術(shù)動(dòng)作所要達(dá)到的標(biāo)準(zhǔn)。針對(duì)于每一階段的課程都設(shè)置有明確的學(xué)習(xí)成果,使學(xué)習(xí)的驅(qū)動(dòng)力來(lái)自于這些最終的學(xué)習(xí)成果而不是原本的課程內(nèi)容。21世紀(jì)的社會(huì)要求體育教育專(zhuān)業(yè)人才擁有較強(qiáng)的實(shí)踐能力,包括體育教學(xué)實(shí)踐能力,競(jìng)賽組織管理能力,組織體育訓(xùn)練的能力等。所以基于OBE教育理念在2014級(jí)體教專(zhuān)業(yè)傳統(tǒng)乒乓球?qū)m?xiàng)課程中,除了正常的掌握所學(xué)的技術(shù)動(dòng)作,還突出了學(xué)生對(duì)所學(xué)的技術(shù)動(dòng)作的重述講解和示范,增加學(xué)生對(duì)所學(xué)技術(shù)動(dòng)作的理解,同時(shí)鍛煉了學(xué)生的學(xué)習(xí)產(chǎn)出能力。同時(shí)在下一個(gè)階段開(kāi)始對(duì)2014級(jí)乒乓球?qū)m?xiàng)生提出現(xiàn)場(chǎng)模擬授課,要求學(xué)生課前備好完整的教案,由老師根據(jù)每個(gè)學(xué)生的各自優(yōu)勢(shì)與不足設(shè)置授課內(nèi)容,以學(xué)生在模擬授課后獲取更多的教學(xué)實(shí)踐經(jīng)驗(yàn)為目標(biāo),結(jié)束后對(duì)學(xué)生進(jìn)行教師評(píng)價(jià)和學(xué)生自我評(píng)價(jià),針對(duì)授課中出現(xiàn)的問(wèn)題進(jìn)行探討與改進(jìn)。同時(shí)保證2014級(jí)體教專(zhuān)業(yè)乒乓球?qū)_x班的學(xué)生在學(xué)校中能夠一個(gè)月最少參與一次乒乓球比賽的編排與裁判工作,包括湖北省的大型乒乓球比賽和校內(nèi)的一些選拔賽,熟悉乒乓球比賽的編排與規(guī)則,將理論與實(shí)踐相結(jié)合,通過(guò)在每次的比賽編排與管理中培養(yǎng)學(xué)生的競(jìng)賽組織管理能力和臨場(chǎng)應(yīng)變能力。為了進(jìn)一步提高體教專(zhuān)業(yè)乒乓球?qū)_x生的專(zhuān)業(yè)素質(zhì)能力,特意與有著乒乓球特色的學(xué)校——光谷第三小學(xué)達(dá)成合作,2014級(jí)體教專(zhuān)業(yè)乒乓球?qū)_x生能夠在光谷三小進(jìn)行三個(gè)多月的教學(xué)實(shí)踐學(xué)習(xí)。通過(guò)實(shí)習(xí)期間參與乒乓球校隊(duì)的訓(xùn)練和乒乓球操的創(chuàng)編、又進(jìn)一步的豐富了學(xué)生的教學(xué)實(shí)踐經(jīng)驗(yàn)和教學(xué)創(chuàng)新。
3.4 課程考核與評(píng)價(jià)
基于OBE教育理念的課程考核與評(píng)價(jià),不是簡(jiǎn)單的對(duì)理論知識(shí)的記憶進(jìn)行考核和評(píng)價(jià),而在于更深層次的理解、升華和運(yùn)用。重點(diǎn)是學(xué)生平時(shí)的技術(shù)技能的鍛煉與提高、教學(xué)實(shí)踐能力的獲得。通過(guò)記錄學(xué)生平時(shí)的學(xué)習(xí)情況,同步建立學(xué)生檔案,體現(xiàn)出學(xué)生通過(guò)學(xué)習(xí)獲得學(xué)習(xí)成果的教育理念。評(píng)價(jià)的方式主要有學(xué)生專(zhuān)業(yè)技術(shù)的達(dá)標(biāo)考核,教案的編寫(xiě),模擬授課的表現(xiàn),比賽的編排,小組作業(yè),實(shí)習(xí)報(bào)告,論文等。課程的考核評(píng)價(jià)是由形成性考核,終結(jié)性考核和元評(píng)價(jià)三個(gè)組成。其中形成性考核是對(duì)學(xué)生學(xué)習(xí)過(guò)程的全面考核,比如學(xué)生專(zhuān)業(yè)技能的展示,教學(xué)實(shí)踐的表現(xiàn)等。終結(jié)性考核主要是對(duì)學(xué)生的“頂峰成果”的考察,元評(píng)價(jià)這是對(duì)評(píng)價(jià)的評(píng)價(jià)。
3.5 對(duì)課程的改善和提高
不斷的改進(jìn)和提高就是先進(jìn)的OBE教育理念的一個(gè)原則。通過(guò)學(xué)生對(duì)預(yù)期成果的完成情況,來(lái)分析課程目標(biāo)、課程設(shè)計(jì)與實(shí)施、課程的考核與評(píng)價(jià)是否存在偏差。如果存在,找出其原因并找出解決辦法,使之形成一個(gè)良性的循環(huán)。
3.6 結(jié)果與分析
通過(guò)2014級(jí)體教專(zhuān)業(yè)乒乓球?qū)I(yè)的專(zhuān)選生與13級(jí)、15級(jí)的體教專(zhuān)業(yè)乒乓球?qū)m?xiàng)生的初步對(duì)比得出以下結(jié)果:
基于OBE教育理念的體教專(zhuān)業(yè)乒乓球?qū)m?xiàng)課程,把教學(xué)的關(guān)注點(diǎn)放在學(xué)生學(xué)習(xí)成果的獲得上,大大打破了傳統(tǒng)課程的課程進(jìn)度為導(dǎo)向的教育模式,它更關(guān)注學(xué)生通過(guò)學(xué)習(xí)之后所能達(dá)到什么樣的成果。這剛好更適合注重技術(shù)能力,實(shí)踐能力的體育教育專(zhuān)業(yè)的課程。經(jīng)過(guò)對(duì)比,14級(jí)體教專(zhuān)業(yè)乒乓球?qū)m?xiàng)生在乒乓球?qū)I(yè)技術(shù)上提高的更為明顯。14級(jí)體教乒乓球?qū)m?xiàng)生在校內(nèi)的體教杯乒乓球聯(lián)賽中,曾獲得17年男子甲組的單打和團(tuán)體冠軍、男子雙打冠軍、混雙冠軍和女子甲組團(tuán)體第二名,15年男子單打冠軍和男子團(tuán)體第二名的好成績(jī)。
在校期間,14級(jí)體教乒乓球?qū)m?xiàng)生由于理論知識(shí)的牢固和大量參與乒乓球的比賽編排與裁判任務(wù),理論與實(shí)踐相結(jié)合,培養(yǎng)了學(xué)生的編排比賽的能力和臨場(chǎng)應(yīng)變能力,裁判素養(yǎng)得到提高。14級(jí)乒乓球?qū)_x生編排并組織了許多湖北省大型的乒乓球比賽和乒乓球項(xiàng)目的運(yùn)動(dòng)會(huì),極少出現(xiàn)有差錯(cuò)的情況。比賽編排組織能力與裁判能力得到顯著提高。
體育教育專(zhuān)業(yè)更注重學(xué)生的教學(xué)實(shí)踐能力,通過(guò)對(duì)比,14級(jí)體教乒乓球?qū)_x生不僅在專(zhuān)業(yè)技術(shù)上有所提高,并且學(xué)生的學(xué)習(xí)產(chǎn)出能力獲得提高。通過(guò)調(diào)查,2014級(jí)體教乒乓球?qū)m?xiàng)生在畢業(yè)后從事本專(zhuān)業(yè)的就業(yè)率比往屆畢業(yè)生所從事本專(zhuān)業(yè)的就業(yè)率提高了10~15個(gè)百分點(diǎn)。同時(shí),教師資格證的合格率也明顯提升,尤其是面試通過(guò)率。這是14級(jí)體教乒乓球?qū)_x生的教學(xué)實(shí)踐能力提升的表現(xiàn)。
基于OBE教育理念的體教乒乓球?qū)m?xiàng)課程由原來(lái)的學(xué)科導(dǎo)向向目標(biāo)導(dǎo)向轉(zhuǎn)變,上課的側(cè)重點(diǎn)發(fā)生改變,重視學(xué)生專(zhuān)業(yè)技能和實(shí)踐能力的獲得,使學(xué)生的能力素質(zhì)的提高達(dá)到一個(gè)新的高度。這就為學(xué)生的學(xué)習(xí)質(zhì)量提供了保障,使得大部分學(xué)生在畢業(yè)時(shí)都能通過(guò)不同的方式,不同的途徑均能達(dá)到頂峰成果。就業(yè)質(zhì)量得到保證。同時(shí)基于OBE教育理念的體教乒乓球?qū)m?xiàng)課程不僅能夠?qū)W(xué)生的每一階段的學(xué)習(xí)成果進(jìn)行評(píng)核,而且通過(guò)對(duì)評(píng)核數(shù)據(jù)的分析對(duì)原有的課程進(jìn)行改進(jìn),使課程不斷完善和進(jìn)步,形成一個(gè)閉合的良性的教育循環(huán),以保障學(xué)生能夠最后達(dá)到畢業(yè)要求。
4 結(jié)語(yǔ)
OBE教育理念作為一種全新的教育理念,是對(duì)傳統(tǒng)的教育方式,方法的革新,從OBE教育理念提出開(kāi)始,便以極快的速度在世界各地傳播,雖然國(guó)際上已經(jīng)形成其比較成熟的理論和實(shí)施體系,但國(guó)內(nèi)的研究和應(yīng)用還處在初級(jí)階段。本研究以全新的教育理念融入到體教乒乓球?qū)m?xiàng)課程中,雖然處于初級(jí)研究階段,但是卻取得比較成功的效果。適應(yīng)當(dāng)今世界前沿教育理念,體現(xiàn)了體育教育專(zhuān)業(yè)對(duì)乒乓球?qū)m?xiàng)生實(shí)踐能力的培養(yǎng),全面提高了學(xué)生的專(zhuān)業(yè)技術(shù)技能和綜合素質(zhì)能力,提高教學(xué)質(zhì)量與效率,改善學(xué)生就業(yè)質(zhì)量,符合當(dāng)今社會(huì)對(duì)乒乓球教育人才的需求。
參考文獻(xiàn)
[1] 袁少輝.體育專(zhuān)業(yè)學(xué)生《乒乓球》課程改革實(shí)踐研究[J].科技風(fēng),2015.6.179(2):208.
[2] 張妍,盧寶洲,孫杰.成果導(dǎo)向視角下文科類(lèi)專(zhuān)業(yè)新型實(shí)踐教學(xué)模式構(gòu)建[J].實(shí)驗(yàn)室研究與探索,2017(11):288-291.
[3] 李光梅.成果導(dǎo)向教育理論及其應(yīng)用[J].教育評(píng)論,2007(1):51-54.
[4] 鮑中舉.基于OBE理念的英語(yǔ)教學(xué)改革啟示[J].知識(shí)文庫(kù),2017(24):145-147.
[5] 李志義,朱泓,劉志軍,夏遠(yuǎn)景.用成果導(dǎo)向教育理念引導(dǎo)高等工程教育教學(xué)改革[J].高等工程教育研究,2014(2):29-34.
[6] 黃茹,舒新峰.成果導(dǎo)向的軟件工程專(zhuān)業(yè)迭失式集中實(shí)踐教學(xué)模式探索與實(shí)踐[J].計(jì)算機(jī)教育,2018.2(10):152-156.
[7] 吳秋鳳,鄒秀楠,劉艷.OBE視域下高校審核評(píng)估對(duì)策研究[J].黑龍江教育(高校研究與評(píng)估),2018.1(22):4-6.
[8] 周洪波,周平.基于OBE理念的高校教學(xué)模式改革研究[J].中國(guó)成人教育,2018(4):92-94.
猜你喜歡
考試周刊(2016年76期)2016-10-09 10:08:04
考試周刊(2016年76期)2016-10-09 10:04:11
考試周刊(2016年76期)2016-10-09 08:47:08
成才之路(2016年26期)2016-10-08 11:33:49
成才之路(2016年25期)2016-10-08 10:05:54
成才之路(2016年25期)2016-10-08 10:04:29
成才之路(2016年25期)2016-10-08 10:03:04
成才之路(2016年25期)2016-10-08 10:00:36
成才之路(2016年25期)2016-10-08 09:51:08
科技視界(2016年20期)2016-09-29 12:59:03