基于霍爾位置傳感器的永磁同步電機速度估計方法研究
2019-08-05 07:20:49王凱王之赟宗兆倫張建亞張露鋒
電機與控制學報 2019年7期
關鍵詞:永磁同步電機
王凱 王之赟 宗兆倫 張建亞 張露鋒
摘?要:為了提高永磁同步電機(PMSM)驅動系統的環境適應性并降低控制系統成本,采用開關型霍爾位置傳感器取代通常使用的高分辨率位置傳感器—光電編碼器或者旋轉變壓器進行轉子位置和速度的估算,實現對電機的高性能矢量控制。該文首先分析了傳統霍爾位置傳感器的估算算法,為了解決傳統估算算法中的問題并提高霍爾位置傳感器的估算效果,使用一種閉環的估算方法,將霍爾位置信號矢量化,前饋解耦后通過觀測器估算出連續的位置信號,并結合改進的鎖相環結構(PLL)提取速度信號,實現位置和速度的準確估算。最后通過實驗平臺驗證對比了該方法和傳統的估算方法的性能。
關鍵詞:霍爾傳感器;永磁同步電機;矢量控制;位置觀測器;鎖相環
中圖分類號:TM 351
文獻標志碼:A
文章編號:1007-449X(2019)07-0046-07
Abstract:In order to improve the environmental adaptability and reduce the cost of the permanent magnet synchronous motor (PMSM) control system,Halleffect sensors were taken to replace the traditional high resolution position sensorsoptical encoders or resolvers, which are usually used to achieve the rotor position and speed of the motor to realize vector control. The estimation algorithm of the traditional Hall position sensor was analyzed firstly. In order to solve the problems in the traditional estimation algorithm and improve the estimation performance of the Hall position sensor, a closed loop estimation method was proposed. Considering Hall position signals as vector signals, the position estimated observer with feedforward decoupling was used to gain continuous position information. Then the speed signal was extracted by the improved structure of phase locked loop (PLL), realizing the accurate estimation of position and speed. Finally through the experiment platform, this estimated method was verified and compared with the traditional method.
Keywords:Halleffect sensors; permanent magnet synchronous motor; vector control; position observer; phaselock loop
0?引?言
因永磁電機具有轉矩密度高,機械結構簡單,體積小的特點,近些年來永磁電機被廣泛運用于生產生活領域。相比于無刷直流電機(brushless direct current motor,BLDC)明顯的轉矩脈動,永磁同步電機能夠輸出平滑的轉矩,降低系統運行的噪音。永磁同步電動機一般采用矢量控制方式,控制系統需要獲得準確可靠的位置信息實現對電機速度和電流的控制。驅動系統通常采用高分辨率的機械式位置傳感器獲得位置和速度信息,例如:光電編碼器,旋轉變壓器。但是同軸安裝的機械式傳感器需要額外的機械結構,增加了系統的所占的空間和成本,而且在高溫潮濕高鹽等較為惡劣的工況下,機械式傳感器的可靠性降低。
為了替代傳統機械式傳感器的無位置傳感器方法主要分為兩種技術路線:一種是基于電機的電壓電流方程的計算方法,這種方法對參數的精度要求較高且在低速時性能不理想。另一種是利用了電機的凸極率注入高頻信號后提取位置和速度信號,高頻信號注入法在低速和零速范圍也能取得較好的估算效果,但是這種方法不直接適用于凸極率小的表貼式電機,且濾波器的構建導致算法較為復雜。
綜合考慮上述方法存在的問題,采用開關型霍爾位置傳感器一類的低分辨率位置傳感器取代原本的機械式傳感器成為一種兼具可靠性和成本優勢的技術方案。開關型霍爾位置傳感器最初是使用在BLDC的控制系統中,使用三個霍爾位置傳感器獲得6個離散的位置信號,控制三相電流的換向。但是離散的位置信號不能直接應用于永磁同步電機的正弦波控制中,需要通過一定的算法將離散的位置信號擬合成連續的位置信號。文獻[1-3]通過計算相鄰兩個霍爾扇區之間轉子的平均速度,通過插值法結合離散的位置信號估算出連續的轉子位置信號,但是當轉速變化劇烈時因為扇區間的平均速度更新滯后會導致誤差。文獻[4]提出利用線性校正取代直接校正改善由于安裝誤差帶來的角度跳變提高系統性能。文獻[5]提出了一種反電動勢觀測器結合霍爾位置傳感器的估算方法,提高了估算的精度和解決了反電動勢無位置技術低速使用的問題。文獻[6-8]提出了一種零滯后的位置估算方法,將離散的位置信號當作空間矢量輸入由電機機械運動方程構建的觀測器中,估算出連續的位置和速度信號。文獻[9]指出了這種方法不僅適用于3個霍爾位置傳感器的情況而且適用于單霍爾位置傳感器,兩個霍爾位置傳感器的情況下。直接從這種觀測器結構中提取的速度信號中包含了較多的高頻噪聲,因此本文為了抑制速度信號中的這種高頻噪聲提高轉速估算的性能采用霍爾位置觀測器結合改進結構鎖相環的結構。這種方法適用于全速度范圍內的估算,具有較好的跟蹤性能。本文基于dSPACE 的電機控制平臺對該方法進行了驗證。
1?基于平均速度的估算方法
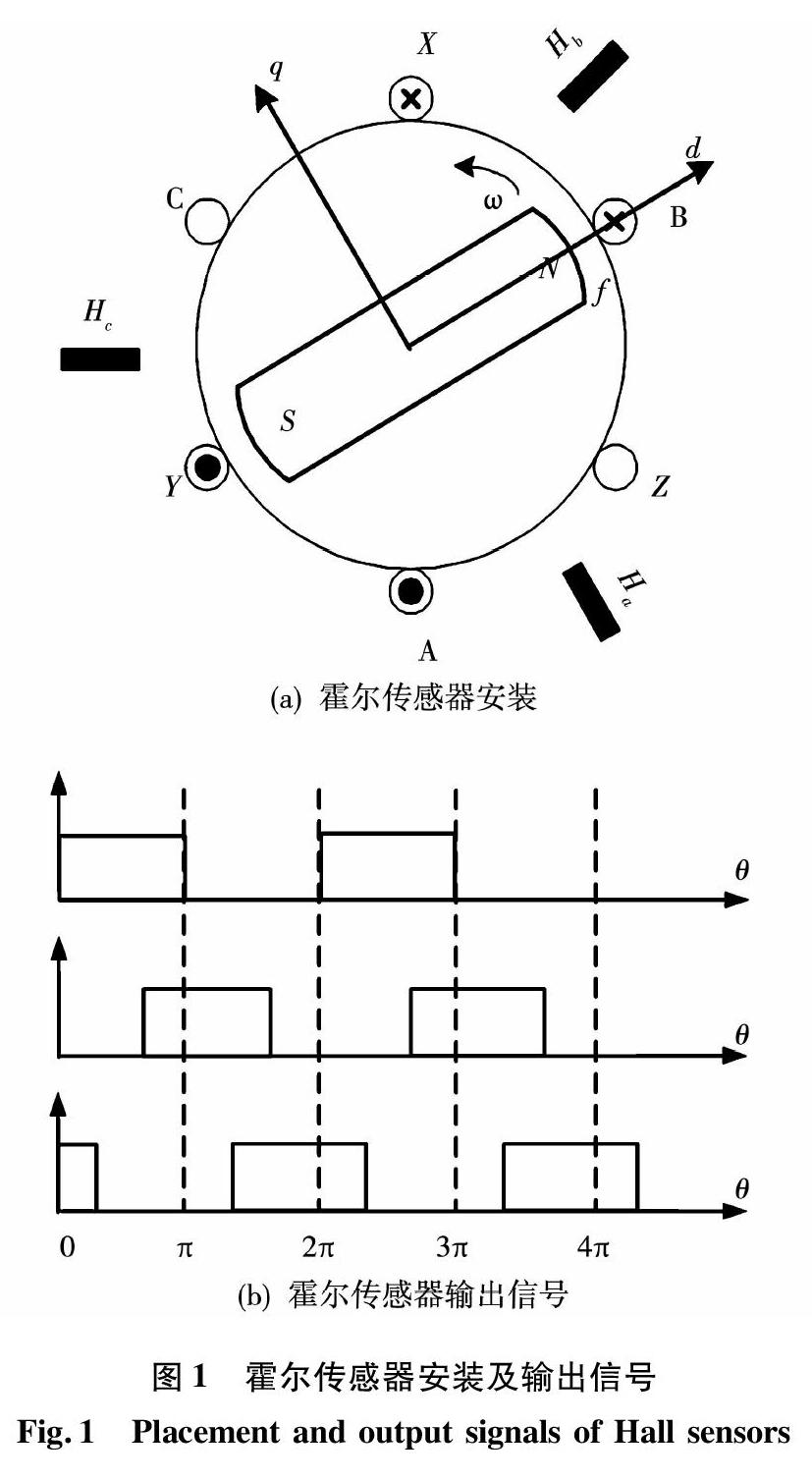
三個霍爾位置傳感器分別被命名為Ha,Hb,Hc,間隔120°電角度安裝在電機定子上,隨著轉子的旋轉,霍爾位置傳感器通過檢測轉子磁場強度過零點輸出示每相間隔120°電角度、占空比為50%的方波信號,霍爾傳感器的安裝如圖1(a)所示,輸出波形如圖1(b)所示。
三相霍爾信號可以組合成6個有效的位置信息可以將一個電周期均分為6個位置扇區。轉子在扇區中的平均速度ω-h的計算公式為
但是這個估算方法還是存在著轉速估算滯后的原理性誤差,為了解決這種估算滯后引起的系統性能下降的現象,所以采用了一種基于霍爾位置傳感器的位置觀測器結構解決這種滯后問題。
2?基于位置觀測器的估算方法
2.1?位置信號估算
為了解決這種因為平均速度計算導致的速度估算滯后性,建立了基于電機機械運動方程的位置觀測器,電機機械運動方程為
其中:J是電機轉動慣量;Tem是電機的電磁轉矩;iq是q軸電流; Kt是電機的轉矩常數;對于表貼式永磁同步電機Tem=Ktiq,TL是負載轉矩,Ω電機轉速,通常粘滯摩擦項B×Ω對電機的影響可以忽略。
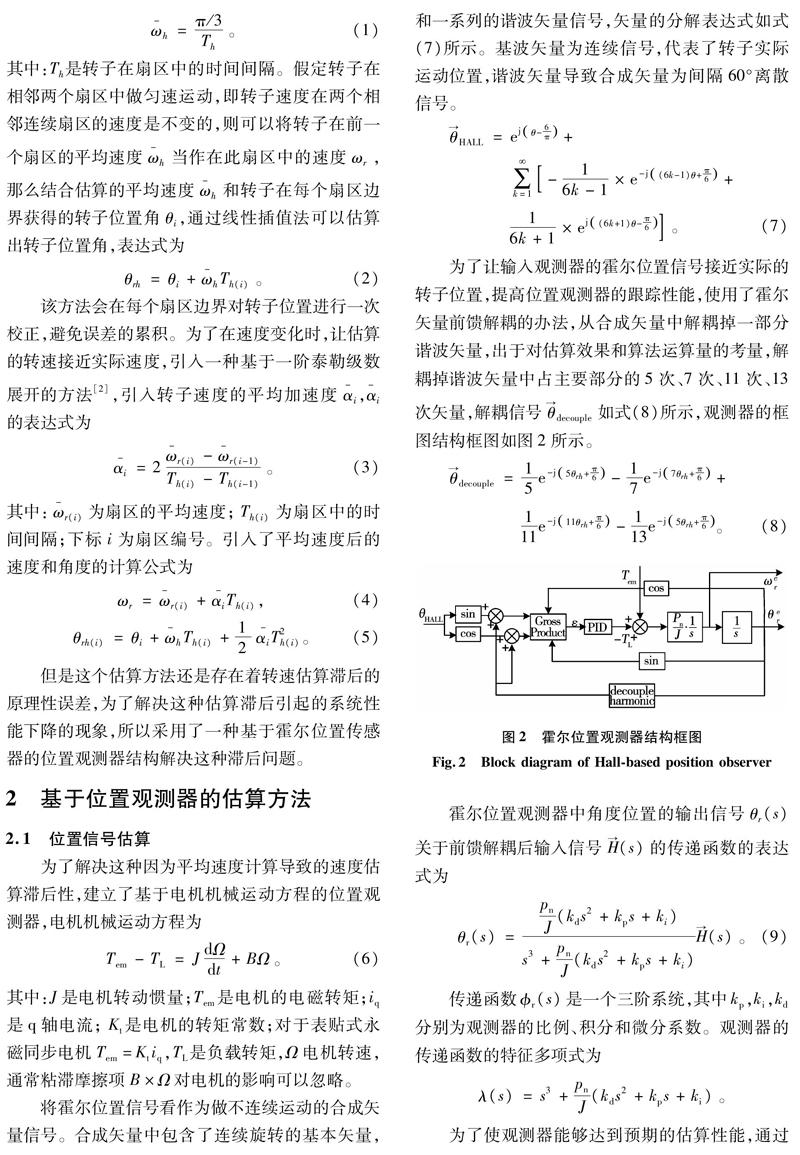
將霍爾位置信號看作為做不連續運動的合成矢量信號。合成矢量中包含了連續旋轉的基本矢量,和一系列的諧波矢量信號,矢量的分解表達式如式(7)所示。基波矢量為連續信號,代表了轉子實際運動位置,諧波矢量導致合成矢量為間隔60°離散信號。
為了讓輸入觀測器的霍爾位置信號接近實際的轉子位置,提高位置觀測器的跟蹤性能,使用了霍爾矢量前饋解耦的辦法,從合成矢量中解耦掉一部分諧波矢量,出于對估算效果和算法運算量的考量,解耦掉諧波矢量中占主要部分的5次、7次、11次、13次矢量,解耦信號θ→decouple如式(8)所示,觀測器的框圖結構框圖如圖2所示。
為了使觀測器能夠達到預期的估算性能,通過設定一個預期的帶寬來整定調節器參數。將特征多項式改寫為的理想形式(s+ωn)3,這里帶寬ωn就變為系統唯一的調節參數[10],選取合適的ωn,就可以確定調節器的參數kd,kp,ki,上述傳遞函數可以改寫成
本文中所述Hz的電機系統的轉速范圍為0~800 r/min,霍爾位置信號的頻率的范圍是0~80 Hz,則觀測器的帶寬ωn設置為80 Hz 。
2.2?速度信號提取
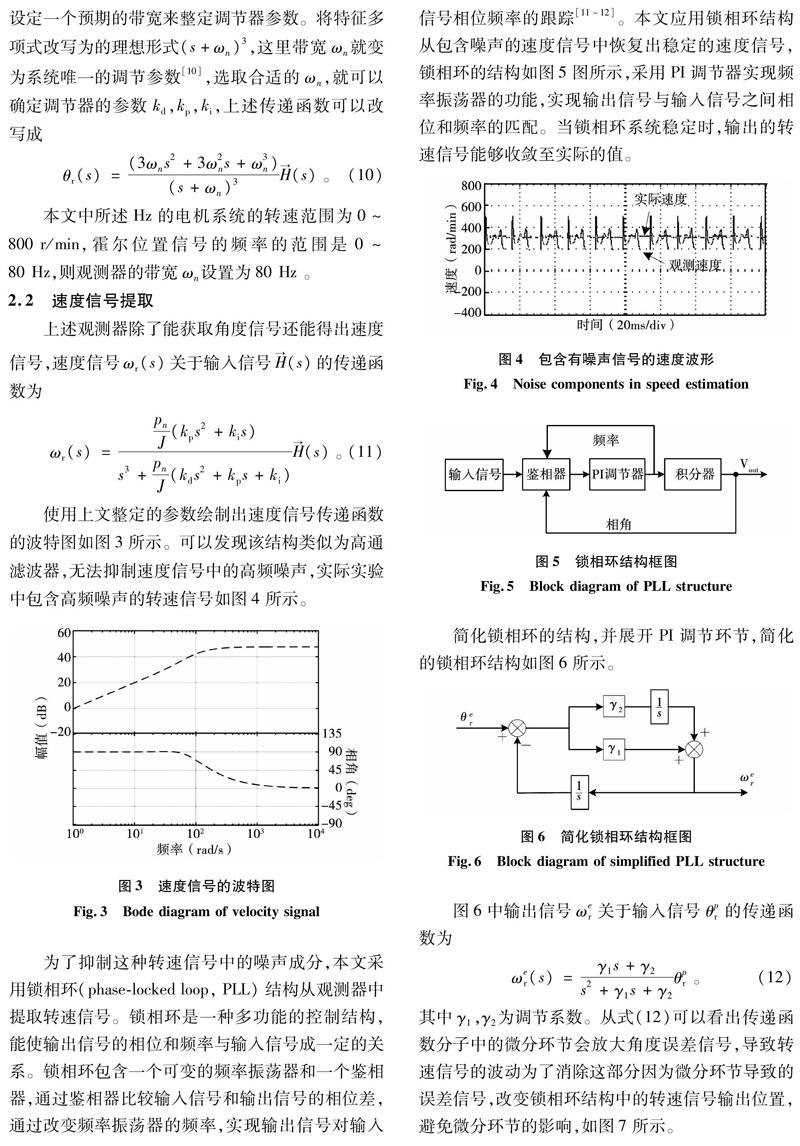
上述觀測器除了能獲取角度信號還能得出速度信號,速度信號ωr(s)關于輸入信號H→(s)的傳遞函數為
使用上文整定的參數繪制出速度信號傳遞函數的波特圖如圖3所示。可以發現該結構類似為高通濾波器,無法抑制速度信號中的高頻噪聲,實際實驗中包含高頻噪聲的轉速信號如圖4所示。
為了抑制這種轉速信號中的噪聲成分,本文采用鎖相環(phaselocked loop, ?PLL) 結構從觀測器中提取轉速信號。鎖相環是一種多功能的控制結構,能使輸出信號的相位和頻率與輸入信號成一定的關系。鎖相環包含一個可變的頻率振蕩器和一個鑒相器,通過鑒相器比較輸入信號和輸出信號的相位差,通過改變頻率振蕩器的頻率,實現輸出信號對輸入信號相位頻率的跟蹤[11-12]。本文應用鎖相環結構從包含噪聲的速度信號中恢復出穩定的速度信號,鎖相環的結構如圖5圖所示,采用PI調節器實現頻率振蕩器的功能,實現輸出信號與輸入信號之間相位和頻率的匹配。當鎖相環系統穩定時,輸出的轉速信號能夠收斂至實際的值。
簡化鎖相環的結構,并展開PI調節環節,簡化的鎖相環結構如圖6所示。
其中γ1,γ2為調節系數。從式(12)可以看出傳遞函數分子中的微分環節會放大角度誤差信號,導致轉速信號的波動為了消除這部分因為微分環節導致的誤差信號,改變鎖相環結構中的轉速信號輸出位置,避免微分環節的影響,如圖7所示。
式(12)和式(13)的表達式可以發現,改進的鎖相環輸出結構的傳遞函數比傳統的少一個微分環節,這樣的結構減小了輸出信號的穩態誤差,抑制了輸出信號中的高頻噪聲,改進鎖相環提取的速度的輸出信號的波形如圖8所示。
基于霍爾位置傳感器觀測器結合改進的鎖相環的整體框圖如圖9所示。
3?兩種估算方法實驗對比驗證
3.1?實驗介紹
為了驗證上文所述基于霍爾位置傳感器的估算方法,搭建了基于DS1107 dSPACE 的實驗驗證平臺,如圖10所示。主要包括穩壓電源、工控機、DS1107 dSPACE半實物仿真器、永磁同步電機,電機同時安裝光電編碼器和霍爾傳感器,光電編碼器得出的信號作為電機的實際值作為實驗參考。以下實驗中將基于霍爾位置觀測器結合改進鎖相環的估算方法簡稱為基于霍爾觀測器的估算方法,實驗所用電機的參數如表1所示。
3.2?靜態實驗
靜態實驗的實驗結果如圖11所示,對比了傳統的基于平均加速度的估算方法和霍爾觀測器的估算方法。圖中所示分別為光電編碼器得到的實際位置,估算的角度位置和兩者間的角度誤差。兩種估算方法實驗的轉速均為500 r/min,負載為2 N·m。通過實驗波形可以看出,兩種估算方法在電機穩定運行的狀態下都能取得較好的估算效果。
3.3?動態實驗
為了測試兩種方法的動態性能,在保持控制系統參數不變的情況下,在電機運行于500 r/min時突加負載轉矩至2 N·m,如圖12所示。可以發現基于霍爾位置觀測器的估算方法的恢復時間約為90 ms,基于一階平均加速度的方法的恢復時間約為140 ms,基于霍爾位置觀測器的估算方法的恢復時間要明顯比傳統的基于平均加速度的方法短。圖13所示的為電機運行于500 r/min和輕載0.5 N·m的情況下改變給定轉速為-500 r/min使電機由正轉向反轉切換的波形。可以發現基于平均加速度的估算方法在電機速度將為零后出現了堵轉的現象,而基于霍爾位置傳感器的位置估算方法的可以完成電機正反轉切換。
4?結?論
本文研究了一種永磁同步電機基于霍爾位置傳感器的估算方法,根據電機的機械運動方程建立了位置觀測器,并通過前饋解耦霍爾矢量信號,得到準確的位置信號,同時針對速度輸出中的噪聲信號,使用改進的鎖相環結構提取平滑的速度信號,取代了高分辨的位置傳感器,實現對電機精確控制。通過實驗平臺將上述與傳統的檢測霍爾扇區間平均加速度的方法進行了對比,實驗結果表明本文提出的方法相較于傳統的估算方法具有更好的抗擾動校正性能和動態跟蹤性能,是一種兼具成本和性能的電機位置傳感器解決方案。
參 考 文 獻:
[1]?MORIMOTO S, SANADA M, TAKEDA Y, Sinusoidal current drive system of permanent magnet synchronous motor with low resolution position sensor[C]//San Diego, CA, Proc. IEEE IAS Annu. Meeting, 1996.
[2]?MORIMOTO S, SANADA M, TAKEDA Y. High performance currentsensorless drive for PMSM and SynRM with only lowresolution position sensor[J]. IEEE Transactions on Industrial Electronics, 2003, 39(3):792-801.
[3]?DALALA Z M, CHO Y H, LAI J S. Enhanced vector tracking observer for rotor position estimation for PMSM drives with low resolution halleffect position sensors[C]//Chicago, IL, IEEE Int. Electric Machines & Drives Conf. (IEMDC), 2013.
[4]?荀倩,王培良,蔡志端,等.霍爾轉子位置預估方法及其誤差校正[J]. 電工技術學報,2017,36(6):145-155.
XUN Qian, WANG Peiliang, CAI Zhiduan, et al. Hall rotor position estimation method and its error compensation[J]. Transactions of China Electrotechnical Society, 2017,36 (6):145-155.
[5]?KIM S Y, CHOI C, LEE K, et al, An improved rotor position estimation with vectortracking observer in PMSM drives with lowresolution halleffect sensors[J]. IEEE Transactions on Industrial Electronics, 2011,58(9):4078-4086.
[6]?CAPPONI F G, DONATO G DE , DEL FERRARO L, Brushless AC drive using an axial flux synchronous PM motor with low resolution position sensors[C]// Aachen, Germany, IEEE 35th Annual Power Electronics Specialists Conference (PESC04), 2004.
C. F. GIULII, G. D. DE AND L. F. DEL, AC brushless drive with lowresolution halleffect sensors for surfacemounted PM machines[J].IEEE Transactions on Industry Application,2006.42(2):526-535.
[7]?DEGNER M W. Flux, position, and velocity estimation in AC machines using carrier signal injection[D]. Madison:University of WisconsinMadison, 1998.
[8]?SCELBA G, DEDONATO G, PULVIRENTI M, et al. Halleffect sensor fault detection, identification, and compensation in brushless DC drives[J]. IEEE Transactions on Industry Applications, 2016, 52(2): 1542-1554.
[9]?FU H, LIU C, ZUO Y F. A completely decoupling twodegreeoffreedom controller for permanent magnet synchronous motor speedregulation system[C]// Monte Carlo, 2016 Eleventh Int. Conf. Ecological Vehicles and Renewable Energies (EVER), 2016.
[10]?LIU J M, ZHU Z Q. Improved sensorless control of permanent magnet synchronous machine based on thirdharmonic backEMF[J]. IEEE Transactions on Industry Applications, 2014, 50(3): 1861-1870.
[11]?SHEN J X, IWASAKI S. Sensorless control of ultrahighspeed PM brushless motor using PLL and third harmonic back EMF[J]. IEEE Transactions on Industrial Electronics, 2006, 53(2): 421-428.
(編輯:劉素菊)
猜你喜歡
現代電子技術(2017年1期)2017-02-16 11:49:32
汽車工程學報(2016年5期)2017-01-16 02:42:50
計算技術與自動化(2016年4期)2017-01-11 14:06:23
電子技術與軟件工程(2016年19期)2016-12-19 18:43:28
中國科技博覽(2016年15期)2016-08-23 00:59:37
電腦知識與技術(2016年13期)2016-06-29 21:41:37
科技視界(2016年12期)2016-05-25 11:07:56
電腦知識與技術(2016年2期)2016-03-22 22:21:46
電腦知識與技術(2016年1期)2016-03-22 15:49:38
哈爾濱理工大學學報(2015年6期)2016-02-18 00:26:49
