搬運(yùn)機(jī)器人在制造業(yè)中的應(yīng)用及發(fā)展趨勢(shì)
2020-11-19 10:56:38黃磊
裝備維修技術(shù) 2020年10期
關(guān)鍵詞:應(yīng)用分析發(fā)展趨勢(shì)
黃磊

摘 要:工業(yè)機(jī)器人技術(shù)是近代自動(dòng)控制領(lǐng)域出現(xiàn)的一項(xiàng)高新技術(shù),是集多領(lǐng)域應(yīng)用技術(shù)有機(jī)融合的一體化裝置。本文主要從工業(yè)機(jī)器人在制造業(yè)中的應(yīng)用、工業(yè)機(jī)器人中搬運(yùn)機(jī)器人在制造業(yè)中的應(yīng)用,對(duì)搬運(yùn)機(jī)器人在制造業(yè)領(lǐng)域的發(fā)展趨勢(shì)進(jìn)行展望。
關(guān)鍵詞:工業(yè)機(jī)器人;搬運(yùn)機(jī)器人;應(yīng)用分析;發(fā)展趨勢(shì)
一、引言
工業(yè)機(jī)器人技術(shù)是近代自動(dòng)控制領(lǐng)域出現(xiàn)的一項(xiàng)高新技術(shù),是集多領(lǐng)域應(yīng)用技術(shù)有機(jī)融合的一體化裝置。目前,工業(yè)機(jī)器人技術(shù)的應(yīng)用已非常廣泛,涉及機(jī)械、電子、運(yùn)動(dòng)控制、傳感檢測(cè)、計(jì)算機(jī)技術(shù)等,尤其是在航空航天工程、海洋探索等高科技領(lǐng)域。《中國(guó)制造2025》也明確了工業(yè)機(jī)器人為中國(guó)制造十大重點(diǎn)領(lǐng)域的第二個(gè)重點(diǎn)領(lǐng)域,進(jìn)入21世紀(jì),工業(yè)機(jī)器人的應(yīng)用程度已經(jīng)成為衡量一個(gè)國(guó)家工業(yè)自動(dòng)化水平的重要標(biāo)志。
二、工業(yè)機(jī)器人在制造業(yè)中的應(yīng)用分析
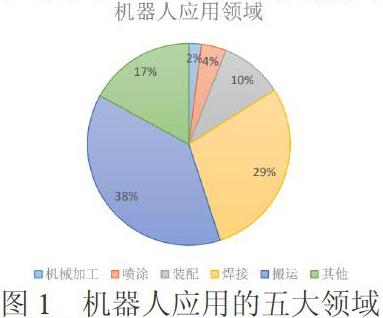
工業(yè)機(jī)器人是機(jī)器人領(lǐng)域中的重要一員,是目前技術(shù)發(fā)展最為成熟、應(yīng)用最為廣泛的一類機(jī)器人,工業(yè)機(jī)器人是面向工業(yè)領(lǐng)域的多關(guān)節(jié)機(jī)械手、多自由度的機(jī)械裝置,它不僅可以按照預(yù)先設(shè)定的程序來執(zhí)行某些特定的工作指令,也可以根據(jù)人工智能技術(shù)制定的程序指令行動(dòng),并依靠自身動(dòng)力和控制能力來實(shí)現(xiàn)工業(yè)制造中所需的各種功能。工業(yè)機(jī)器人一般用于機(jī)械制造業(yè)中替代人工完成一些具有高質(zhì)量、大批量要求的工作,如艦船、汽車、摩托車的制造,電視機(jī)、電冰箱、洗衣機(jī)等家電產(chǎn)品生產(chǎn),化工等行業(yè)自動(dòng)化生產(chǎn)線中的電焊、弧焊、噴漆、切割、電子裝配及物流系統(tǒng)的搬運(yùn)、包裝、碼垛等作業(yè)。隨著機(jī)器人技術(shù)的不斷更新與發(fā)展,機(jī)器人的應(yīng)用領(lǐng)域進(jìn)一步拓寬,集中體現(xiàn)在以下五大領(lǐng)域(如圖1)。
(1)機(jī)器人搬運(yùn)應(yīng)用(38%)。機(jī)器人搬運(yùn)作為工業(yè)機(jī)器人的第一大應(yīng)用領(lǐng)域,為很多自動(dòng)化生產(chǎn)線進(jìn)行上下料、搬運(yùn)以及碼垛等操作。隨著協(xié)作機(jī)器人的興起,搬運(yùn)機(jī)器人的市場(chǎng)份額也逐年提升。
(2)機(jī)器人焊接應(yīng)用(29%)。機(jī)器人焊接應(yīng)用主要包括汽車行業(yè)中使用的電焊和弧焊,在很多加工車間逐步引入用來實(shí)現(xiàn)自動(dòng)化焊接作業(yè)。
(3)機(jī)器人裝配應(yīng)用(10%)。裝配機(jī)器人主要應(yīng)用于零部件的安裝、拆卸以及修復(fù)等工作。
(4)機(jī)器人噴涂應(yīng)用(4%)。機(jī)器人噴涂主要應(yīng)用于工業(yè)制造業(yè)中的涂裝、點(diǎn)膠、噴漆等工作。
(5)機(jī)械加工應(yīng)用(2%)。機(jī)械加工機(jī)器人主要應(yīng)用于零件鑄造、激光切割以及水射流切割。
三、工業(yè)機(jī)器人在制造業(yè)中的典型應(yīng)用舉例——搬運(yùn)機(jī)器人
1.搬運(yùn)機(jī)器人介紹
搬運(yùn)機(jī)器人(如圖2)是能夠進(jìn)行自動(dòng)搬運(yùn)作業(yè)的工業(yè)機(jī)器人,在作業(yè)時(shí),與生產(chǎn)控制系統(tǒng)相連接,形成一種完整的集成化搬運(yùn)系統(tǒng)。搬運(yùn)機(jī)器人主要分為移動(dòng)搬運(yùn)小車(AGV)、碼垛機(jī)器人、分解機(jī)器人、機(jī)床上下料機(jī)器人等。世界上出現(xiàn)最早的搬運(yùn)機(jī)器人是1960年由美國(guó)設(shè)計(jì)研發(fā)的Versatran和Unimate。目前,世界上使用的搬運(yùn)機(jī)器人已超過10萬臺(tái),廣泛應(yīng)用于汽車零部件制造、汽車生產(chǎn)組裝、機(jī)械加工、電子電氣、橡膠及塑料、木材與家具等制造行業(yè)以及醫(yī)藥、食品、飲料、化工等行業(yè)的輸送、包裝、裝箱、搬運(yùn)、碼垛等工作領(lǐng)域中。
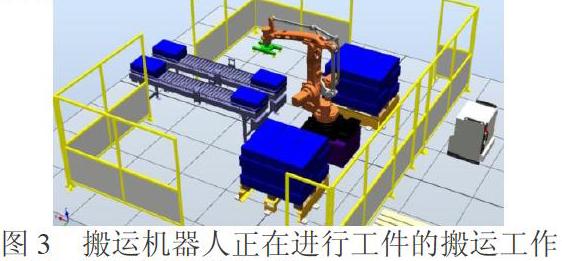
搬運(yùn)機(jī)器人在執(zhí)行操作指令時(shí),是末端夾具設(shè)備握持工件,將工件從一個(gè)加工位置移動(dòng)到另一個(gè)加工位置,整個(gè)搬運(yùn)系統(tǒng)構(gòu)成了工業(yè)機(jī)器人的搬運(yùn)工作站。 如果給搬運(yùn)機(jī)器人安裝不同類型的末端執(zhí)行器,則可完成不同形態(tài)和狀態(tài)的工件搬運(yùn)工作。
搬運(yùn)機(jī)器人的軸數(shù)一般分為6軸式和4軸式。其中6軸式主要用于各行業(yè)的重物搬運(yùn)作業(yè),尤其是重型夾具、車身的轉(zhuǎn)動(dòng)、發(fā)動(dòng)機(jī)的起吊等。4軸式由于軸數(shù)少,運(yùn)動(dòng)軌跡近于直線,因此速度明顯提高,適用于高速包裝、碼垛等。
2.搬運(yùn)機(jī)器人的特點(diǎn)及優(yōu)勢(shì)
總的來說,搬運(yùn)機(jī)器人工作站具有如下特點(diǎn):(1)具有物品的傳送裝置,其形式可根據(jù)物品的特點(diǎn)選用或設(shè)計(jì);(2)可使物品準(zhǔn)確定位,便于機(jī)器人抓取;
(3)設(shè)有物品托板,可機(jī)動(dòng)或自動(dòng)地交換托板;(4)在傳送物品的過程中可自行整型,以確保碼垛質(zhì)量;(5)可根據(jù)搬運(yùn)物品設(shè)計(jì)專用的末端執(zhí)行器;(6)可根據(jù)行業(yè)需要選用適合的搬運(yùn)作業(yè)的機(jī)器人。
在制造領(lǐng)域中,搬運(yùn)機(jī)器人具有如下優(yōu)勢(shì):(1)提高生產(chǎn)率,可實(shí)現(xiàn)一天24小時(shí)無間斷工作;(2)改善工人勞動(dòng)強(qiáng)度,減少人工成本;(3)大大縮短產(chǎn)品改型換代的準(zhǔn)備周期,減少所需的設(shè)備投資;(4)實(shí)現(xiàn)工廠自動(dòng)化、無人化生產(chǎn)。
四、搬運(yùn)機(jī)器人的發(fā)展趨勢(shì)展望
當(dāng)前,工業(yè)機(jī)器人已經(jīng)廣泛應(yīng)用于焊接、切割、裝配、搬運(yùn)、噴涂等領(lǐng)域,工作難度、復(fù)雜程度日趨增加,用戶對(duì)產(chǎn)品品質(zhì)和加工效率的要也越來越高。在這種情形下,機(jī)器人的編程方式、效率和質(zhì)量就顯得尤為重要。因此,降低編程難度及工作量,提高編程效率,已成為機(jī)器人技術(shù)發(fā)展的終極目標(biāo)。
目前,針對(duì)提高機(jī)器人的工作效率,已經(jīng)出現(xiàn)了多種編程方式,如:在線示教編程、離線編程和自主編程技術(shù)。在線編程能夠直接切合實(shí)際操作環(huán)境,針對(duì)工作站現(xiàn)場(chǎng)編程,且上手簡(jiǎn)單適合初學(xué)者;離線編程可利用計(jì)算機(jī)圖形學(xué)的成果,通過對(duì)工作單元進(jìn)行三維建模,在仿真環(huán)境中建立與現(xiàn)實(shí)工作環(huán)境對(duì)應(yīng)的場(chǎng)景,采用規(guī)劃算法對(duì)圖形進(jìn)行控制和操作,適合在仿真環(huán)境下針對(duì)復(fù)雜路徑進(jìn)行規(guī)劃與生成,節(jié)約時(shí)間方便操作(如圖4);自主編程技術(shù)融合多種傳感技術(shù)自動(dòng)生成軌跡程序,更加智能。
搬運(yùn)機(jī)器人的發(fā)展趨勢(shì)主要有以下幾方面:(1)搬運(yùn)機(jī)械手的性能不斷提高 (高速度、高精度、高可靠性、便于操作和維修),而單機(jī)價(jià)格不斷下降。(2)加速機(jī)器人功能部件向標(biāo)準(zhǔn)化、模塊化、可重構(gòu)化發(fā)展,減少重量和占用空間;將機(jī)器人的各機(jī)械模塊、控制模塊、檢測(cè)模塊組成結(jié)構(gòu)不同的機(jī)器人。例如關(guān)節(jié)模塊中的伺服電機(jī)、減速機(jī)、檢測(cè)系統(tǒng)三位一體化,由關(guān)節(jié)模塊、連桿模塊用重組方式構(gòu)造搬運(yùn)機(jī)械手整機(jī)。(3)搬運(yùn)機(jī)械手的控制系統(tǒng)向基于 PC機(jī)的開放型控制器方向發(fā)展,趨于標(biāo)準(zhǔn)化、網(wǎng)絡(luò)化;器件集成度提高,控制柜日見小巧,且采用模塊化結(jié)構(gòu),以提高系統(tǒng)的可靠性、易操作性和可維修性。(4)搬運(yùn)機(jī)械手中的傳感器作用日益凸顯,除采用傳統(tǒng)的位置、速度、加速度等傳感器外,搬運(yùn)機(jī)械手還需應(yīng)用視覺、力覺等傳感器,研制各類傳感器及檢測(cè)元器件,如,觸覺、視覺、聽覺、味覺、和測(cè)距傳感器等,用傳感器獲得工作對(duì)象周圍的外界環(huán)境信息、位置信息、狀態(tài)信息以完成模式識(shí)別、狀態(tài), 融合各種傳感技術(shù)自動(dòng)生成軌跡程序。(5)虛擬現(xiàn)實(shí)技術(shù)在搬運(yùn)機(jī)械手中的作用從仿真、預(yù)演發(fā)展到用于過程控制,如使遙控機(jī)械手操作者產(chǎn)生置身于遠(yuǎn)端作業(yè)環(huán)境中的感覺來操縱搬運(yùn)機(jī)械手。
參考文獻(xiàn)
[1] 蘭虎,戴鴻賓,劉俊等.工業(yè)機(jī)器人技術(shù)及應(yīng)用[M]. 北京:機(jī)械工業(yè)出版社,2014.8.
[2] 駱敏舟,方健,趙江海.工業(yè)機(jī)器人的技術(shù)發(fā)展及其應(yīng)用[J].機(jī)械制造與自動(dòng)化,2015,(1).
[3]李義強(qiáng),鄭睿,盧衛(wèi)子等.智能化物料搬運(yùn)機(jī)器人的系統(tǒng)開發(fā)與結(jié)構(gòu)分析[J].機(jī)械工程與技術(shù),2019,(5).
猜你喜歡
現(xiàn)代經(jīng)濟(jì)信息(2016年19期)2016-10-20 18:10:09
課程教育研究·學(xué)法教法研究(2016年21期)2016-10-20 17:55:49
現(xiàn)代經(jīng)濟(jì)信息(2016年19期)2016-10-20 15:51:16
中學(xué)課程輔導(dǎo)·教師教育(中)(2016年9期)2016-10-20 15:26:49
現(xiàn)代經(jīng)濟(jì)信息(2016年19期)2016-10-20 15:26:02
中國(guó)科技博覽(2016年19期)2016-10-19 13:03:52
中國(guó)科技博覽(2016年19期)2016-10-19 12:22:05
中國(guó)科技博覽(2016年18期)2016-10-19 11:24:50
中國(guó)科技博覽(2016年18期)2016-10-19 11:20:01
中國(guó)科技博覽(2016年18期)2016-10-19 09:22:46
