一種連續自動運輸裝置結構設計
2022-11-25 03:34:34韋磊,張鴻
艦船電子對抗 2022年5期
關鍵詞:踏板
韋 磊,張 鴻
(中國船舶集團有限公司第八研究院,江蘇 揚州 225101)
0 引 言
自動扶梯是現代運輸工具中的一種運載機械,主要應用于各大商場、站臺等場合,能夠實現行人在2個不同高度的水平面之間的相互運輸。傳統自動扶梯基本是直線型,只能滿足點到點之間的直線運輸,軌跡單一,梯路無法隨地形和環境變化,因此只能適用于特定場合,嚴重限制了其使用范圍。隨著越來越多樣化的建筑理念和建筑形式,直線型自動扶梯已滿足不了酒店、大廈和高檔旅游景區等特殊環境的需要[1]。
為了實現自動扶梯變坡度、變方向循環運行的目的,本文提出了一種新型連續自動運輸裝置[2]。該運輸裝置與傳統扶梯相比,不僅含有水平直線段、傾斜段等常見梯路,還含有曲率半徑變化的螺旋區段和水平彎曲段等,形式靈活多變,可以往復循環運行。本文設計的連續自動運輸裝置梯級能夠沿曲率半徑可變,在平行于梯級踏面內環形封閉的梯路上行走,梯路中可含有直線段、圓弧段和變曲率段等,能夠根據空間環境進行配置[3]。該運輸裝置的主要優點在于突破了傳統扶梯梯級只有一半用于實際運載的缺陷,利用率高;可以變坡度、變方向回環運行,適應性好。
1 連續自動運輸裝置機械結構
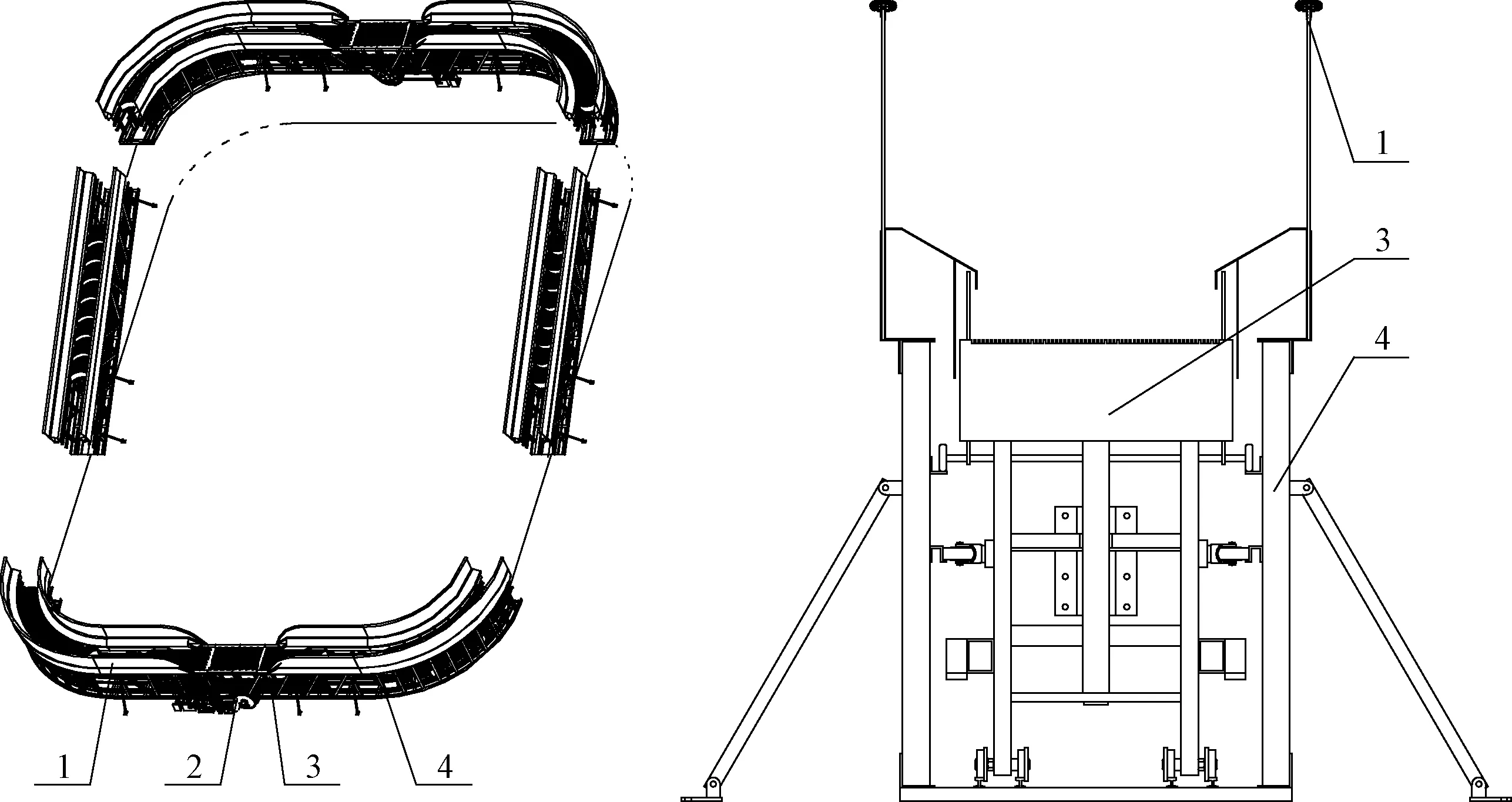
1—扶手裝置;2—驅動裝置;3—梯級裝置;4—導軌裝置圖1 連續自動運輸裝置布置圖
連續自動運輸裝置的布置圖如圖1所示,主要包括扶手裝置、驅動裝置、梯級裝置和導軌裝置。其中導軌裝置環形封閉布置在變坡度、變方向的地形上,扶手裝置固定在導軌裝置上方,驅動裝置設置在連續自動運輸裝置的出入口處。梯級裝置布置在導軌裝置內部,通過導軌裝置導向、驅動裝置驅動沿著導軌連續循環運動。
在設計該連續自動運輸裝置時,需要根據地形情況對梯路進行設計,根據結構參數繪出梯路俯視圖(如圖2所示),包括水平直線段、彎曲段和傾斜段,具體尺寸單位為mm,梯路傾斜段具體尺寸如圖3所示。

1—水平直線段;2—彎曲段;3—傾斜段圖2 梯路俯視圖

圖3 梯路傾斜段圖
連續自動運輸裝置的基本參數包括傾斜段傾角α,梯級踏板的寬度z,額定運行速度v,理論輸送能力C等。自動扶梯傾角為梯級踏板與水平面構成的角度,要求不超過30°,本文取α=20°。國內自動扶梯梯級踏板寬度通常有0.6 m、0.8 m、1.0 m 3種參數,本文取z=0.8 m。國標自動扶梯額定運行速度通常有0.50 m/s、0.65 m/s或0.75 m/s 3種參數,本文取v=0.5 m/s。理論運載能力C為每小時可以運載的乘客人數,它是假設所有梯級上都裝滿乘客,則有:
(1)
式中:k為承重因子,與踏板寬度z相關,當z=0.8 m時,k=1.5;額定運行速度v=0.5 m/s;y為梯級踏板的深度,國標規定大于0.38 m,本文取y=0.6 m;理論輸送能力C=4 500人/h。
2 扶手裝置和驅動裝置設計
扶手裝置示意圖如圖4所示,包括玻璃欄板、扶手帶、驅動輪和張緊輪。其中扶手帶設置在玻璃欄板上方,驅動輪通過電機驅動,從而帶動扶手帶沿著玻璃欄板上方的導軌導向循環運動,張緊輪側向壓緊扶手帶提供張緊力,防止扶手帶打滑影響扶手帶與梯級裝置的同步性。
1—玻璃欄板;2—扶手帶;3—驅動輪;4—張緊輪圖4 扶手裝置示意圖

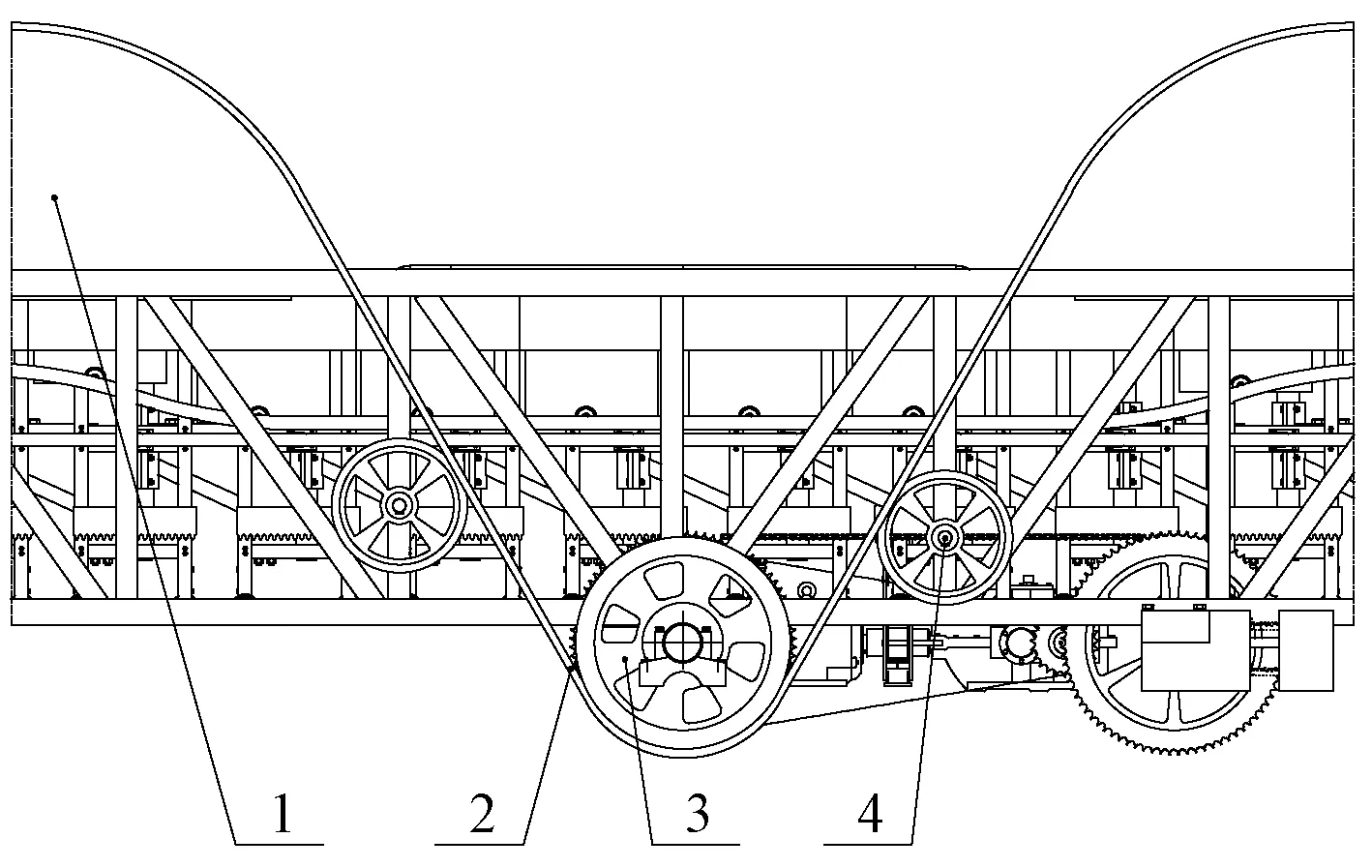
1—張緊裝置;2—驅動副軸;3—驅動鏈輪;4—高速鏈輪;5—減速器;6—制動器;7—電機;8—傳動鏈;9—低速鏈輪;10—驅動主軸;11—扶手帶驅動輪;12—驅動鏈圖5 驅動裝置示意圖
驅動裝置包括驅動鏈、驅動鏈輪、驅動副軸、驅動主軸、張緊裝置、扶手帶驅動輪、低速鏈輪、高速鏈輪、傳動鏈、電機、減速器和制動器,如圖5所示。驅動鏈輪驅動2條平行設置且構成閉環的驅動鏈運動,驅動鏈輪分別通過驅動副軸和驅動主軸連接,驅動副軸兩端分別設有張緊裝置。驅動主軸一端設有扶手帶驅動輪,另一端設有低速鏈輪,低速鏈輪與高速鏈輪通過傳動鏈傳動,高速鏈輪通過電動機驅動、減速器減速以及制動器制動。
3 導軌裝置設計
導軌裝置包括斜撐、橫梁、斜梁、豎梁、縱梁、外導軌、內導軌、水平腳輪導軌和護腳板輪導軌,如圖6所示。導軌裝置是連續自動運輸裝置的主要支撐主體和導向系統,用來支撐和安裝其它零部件,包括梯級裝置、扶手裝置等,承受運輸載荷;同時隨地形而變化,為梯級裝置的運動提供導向。上下平行布置的4根橫梁和周期間隔排布的斜梁、豎梁、縱梁組成導軌裝置的主要承載桁架結構,桁架兩側布置有斜撐,增加了結構的承載強度。桁架結構內部底面分別對稱設有外導軌和內導軌,內部側面分別對稱設有水平腳輪導軌和護腳板輪導軌。外導軌和內導軌為梯級的外腳輪和內腳輪提供導向,并承載外腳輪和內腳輪傳遞的載荷,同時通過控制外導軌和內導軌的相對高度可以保證變坡度環境下梯級踏板能夠保持水平。水平腳輪導軌通過給梯級側輪提供導向限制梯級水平運動,防止其跑偏,護腳板輪導軌通過高度控制可以實現護角板始終處于踏板上方一定高度。

1—斜撐;2—橫梁;3—斜梁;4—豎梁;5—縱梁;6—外導軌;7—內導軌;8—水平腳輪導軌;9—護腳板輪導軌圖6 直線段導軌裝置示意圖
變坡度、變方向連續自動運輸裝置、導軌裝置的軌跡應包括直線段、彎曲段、傾斜段,彎曲段導軌裝置示意圖如圖7所示。將直線段內外導軌的高度加以調節即可變成傾斜段,內外導軌等高為水平路段,內導軌高于外導軌為傾斜向下段,外導軌高于內導軌為傾斜向上段。
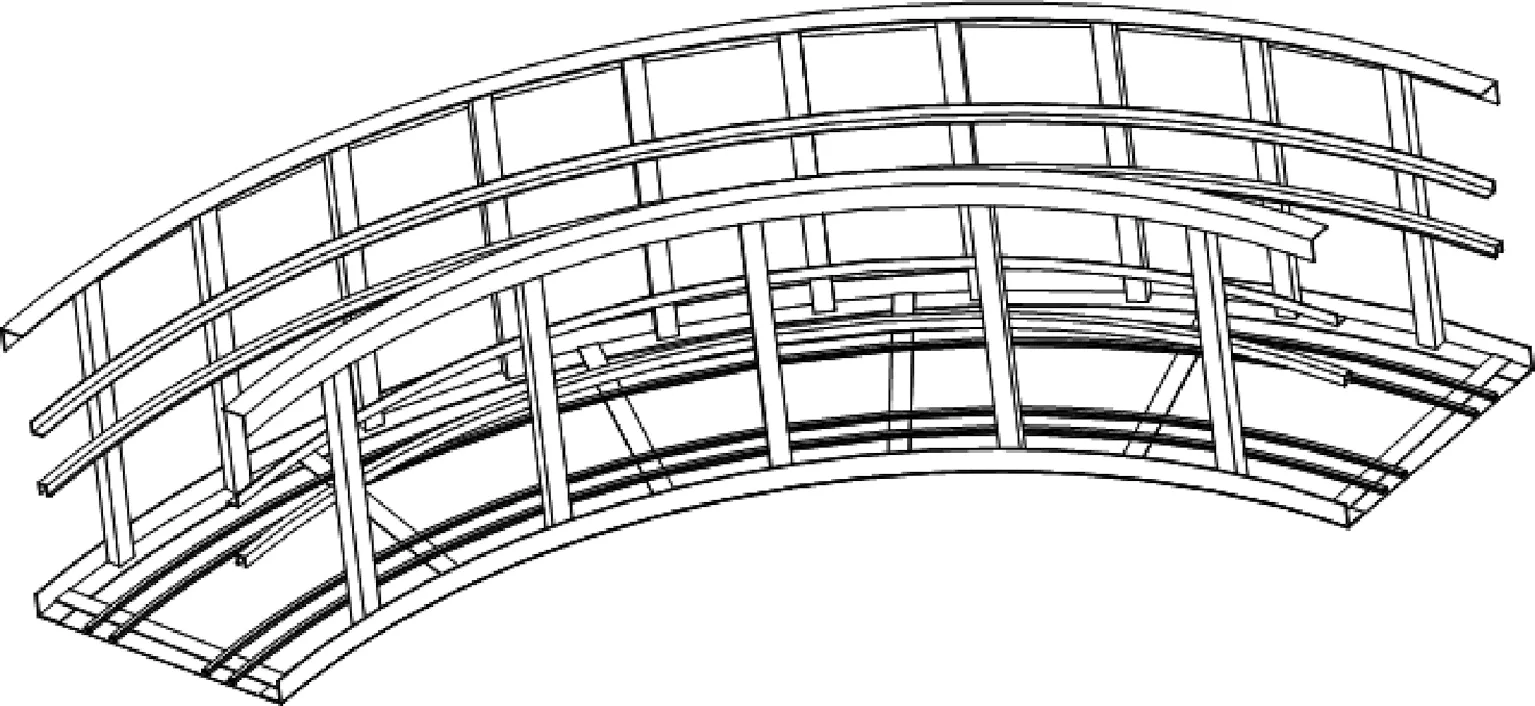
圖7 彎曲段導軌裝置示意圖
4 梯級裝置設計
梯級裝置包括踏板、主立柱、旋轉腳輪、托架、主軸套、輔助軸套、外腳輪、肋板、縱梁、T型梁、齒條、輔助橫梁、內腳輪、輔助立柱、角鋼、主橫梁、主托板、中柱和輔助托板,如圖8所示。踏板下方通過角鋼前后平行固接有垂直于踏板面的2根主立柱和2根輔助立柱,主立柱和輔助立柱之間自上而下分別對稱固接有2根主橫梁、2根T型梁和2根輔助橫梁,2根主立柱之間自上而下平行固接有托架和縱梁,2根主橫梁之間及2根輔助橫梁之間分別平行設有主托板和輔助托板,主托板和輔助托板之間設有中柱,托架外側端部固接有主軸套,主軸套另一側與輔助軸套固接,主軸套與縱梁之間固接有肋板。主立柱和輔助立柱外側對稱設有齒條,兩側的齒條用來添加驅動。2根T型梁的外側對稱設有旋轉腳輪,用于平衡側向力,保證整個梯級的安全性。2根主立柱和2根輔助立柱外側分別對稱設有外腳輪和內腳輪。梯級裝置踏板的前端為圓狀凸弧,后端為半徑相同的圓狀凹弧;中柱中心線與踏板垂直并通過踏板凸圓弧圓心,主軸套和輔助軸套形成的軸孔中心線與踏板垂直并通過踏板凹圓弧圓心;裝配時,后踏板的凸弧裝配在前踏板的凹弧中,后踏板的中柱裝配在前踏板的主軸套和輔助軸套形成的軸孔中,實現梯級之間的旋轉運動與上下運動。

1—踏板;2—主立柱;3—旋轉腳輪;4—托架;5—主軸套;6—輔助軸套;7—外腳輪;8—肋板;9—縱梁;10—T型梁;11—齒條;12—輔助橫梁;13—內腳輪;14—輔助立柱;15—角鋼;16—主橫梁;17—主托板;18—中柱;19—輔助托板圖8 梯級裝置示意圖
梯級踏板承受乘客的重量,需要對其進行強度校核。梯級踏板材料選用6061鋁,將三維模型導入ANSYS軟件,設置材料參數,包括彈性模量,密度和泊松比,對踏板底部4個連接處施加完全約束,對踏板面施加均布面載荷0.1 MPa。通過靜力學求解得到踏板的位移和應力分布云圖,如圖9所示。其中踏板最大位移為0.59 mm,最大應力為46.4 MPa,因此滿足強度要求。
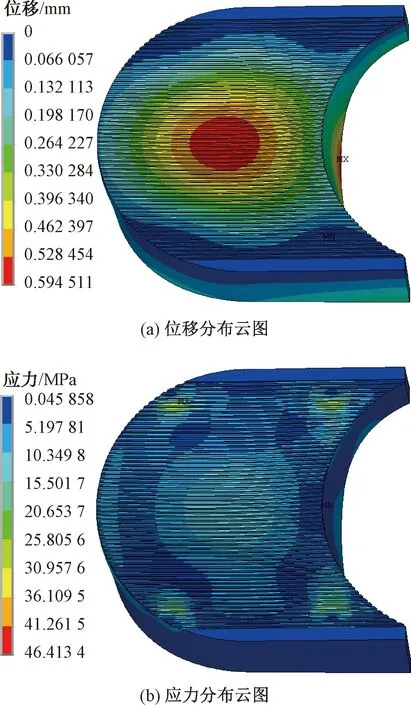
圖9 梯級踏板仿真結果
圖10為彎曲軌道梯級連接示意圖,每2個梯級踏板之間的轉動角度都是可變的,該梯級可以適應變坡度、變方向的環境,可根據地形特點進行鋪設,適應性強。
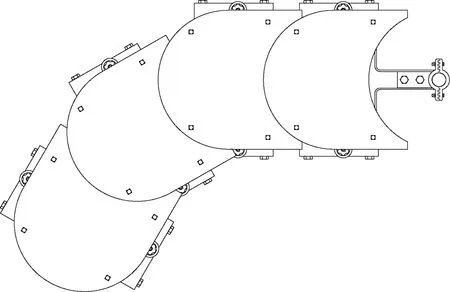
圖10 彎曲軌道梯級連接示意圖
圖11為傾斜段梯級連接示意圖,外導軌低于內導軌時對應傾斜上升段,外導軌高于內導軌時對應傾斜下降段,外導軌與內導軌平齊時對應水平段;通過調整內導軌和外導軌的相對高度保證梯級踏板在傾角變化的軌道中始終保持水平。
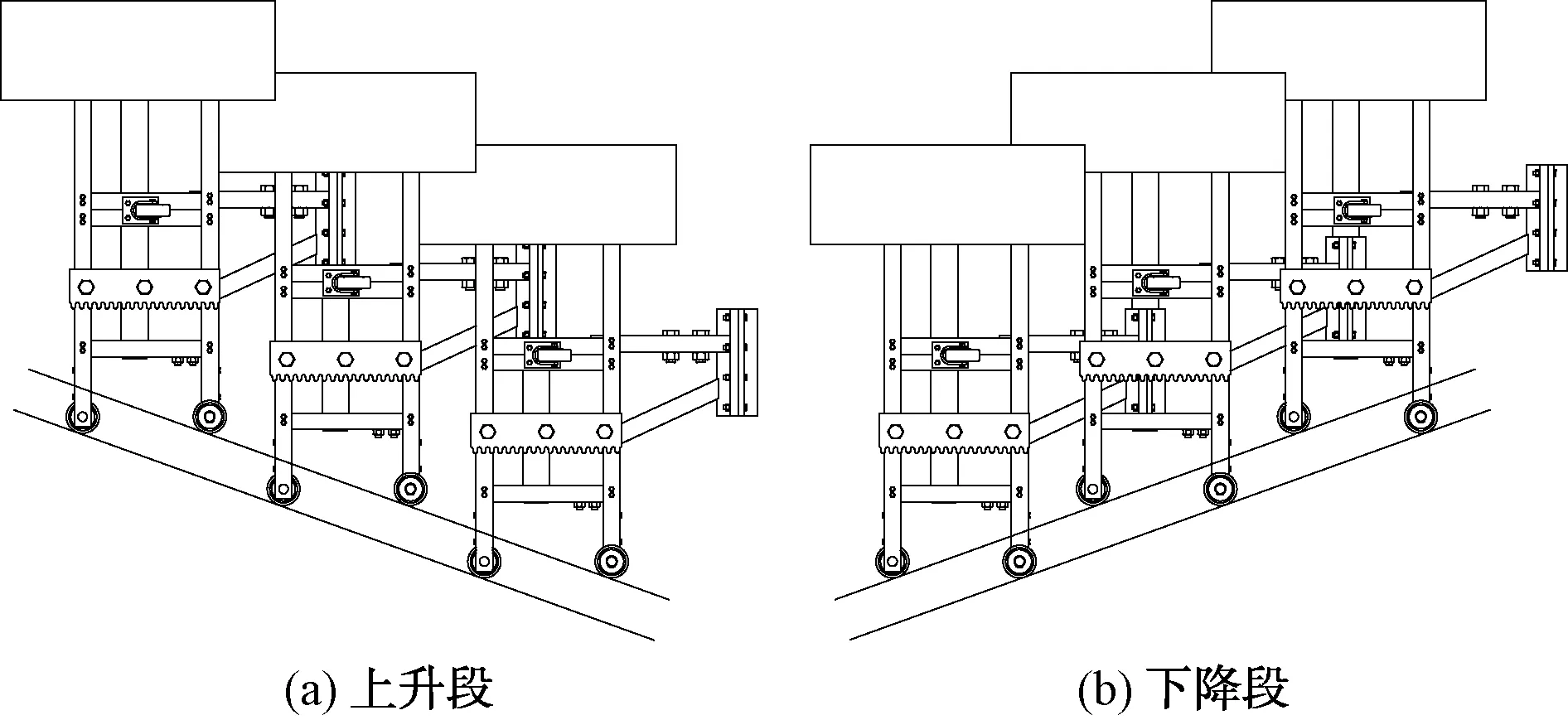
圖11 傾斜段梯級連接示意圖
5 結束語
(1) 設計了一種連續自動運輸裝置機械結構排布,可以實現變坡度、變方向的復雜地形條件下人員的可靠、高效運輸,尤其適用于大型室內購物商場、展覽館、高檔室外旅游景區等場合。
(2) 設計了具體的導向裝置結構,通過控制內外導軌的高度,使踏板始終保持水平,可以根據地形特點進行鋪設,適應性強。
(3) 設計了具體的梯級裝置結構,實現梯級之間的上下與旋轉運動,可以滿足扶梯軌道變曲率的要求,提高了空間利用率,同時對踏板強度進行了校核。
猜你喜歡
車主之友(2022年6期)2023-01-30 07:58:16
黃河之聲(2020年4期)2020-12-07 10:48:25
公路與汽運(2020年6期)2020-12-07 02:22:10
黃河之聲(2019年23期)2019-12-17 19:08:43
汽車實用技術(2019年17期)2019-09-21 03:46:32
汽車與駕駛維修(維修版)(2018年8期)2018-09-21 02:48:54
讀寫算·素質教育論壇(2017年16期)2017-08-04 07:52:36
黃河之聲(2017年13期)2017-01-28 13:30:17
教育界·下旬(2016年4期)2016-11-19 22:15:52
北方音樂(2016年22期)2016-02-04 16:52:16
