工業(yè)機器人時代的維修電工探討
2015-05-30 13:40:32朱志偉
企業(yè)技術(shù)開發(fā)·下旬刊 2015年9期
關(guān)鍵詞:教學(xué)改革
朱志偉
摘 要:文章分析了在工業(yè)機器人大量應(yīng)用的背景下維修電工崗位核心職業(yè)能力的新變化,并探討了當(dāng)前維修電工對應(yīng)的學(xué)習(xí)領(lǐng)域,提出了新形勢下維修電工設(shè)計與能力培養(yǎng)的路線圖,以為全國職業(yè)院校相關(guān)專業(yè)的維修電工領(lǐng)域的改革與發(fā)展提供思路。
關(guān)鍵詞:維修電工;教學(xué)改革;課程設(shè)計
中圖分類號:TP242.2 文獻(xiàn)標(biāo)識碼:A 文章編號:1006-8937(2015)27-0064-02
1 維修電工
維修電工崗位職業(yè)能力的培養(yǎng),是全國各職業(yè)院校眾多專業(yè)人才培養(yǎng)方案的重點要求。
研究新形勢下維修電工學(xué)習(xí),不僅是提高教學(xué)質(zhì)量的重要途徑,而且對全國職業(yè)教育具有重要意義。
本文以工業(yè)機器人時代到來為背景,總結(jié)我國工業(yè)機器人的發(fā)展與應(yīng)用現(xiàn)狀,分析當(dāng)前工業(yè)技術(shù)發(fā)展形勢下“維修電工崗位”核心職業(yè)能力要求的新變化,歸納適應(yīng)工業(yè)生產(chǎn)發(fā)展需求的維修電工崗位對應(yīng)的學(xué)習(xí)領(lǐng)域,進而探討相應(yīng)學(xué)習(xí)領(lǐng)域的課程與教學(xué)設(shè)計,最后提出了維修電工課程設(shè)計與能力培養(yǎng)路線圖,為當(dāng)前高職維修電工領(lǐng)域的發(fā)展提供思路。
2 工業(yè)機器人的發(fā)展與應(yīng)用現(xiàn)狀
工業(yè)機器人的發(fā)展可分為三個階段:第一代示教再現(xiàn)機器人,目前工業(yè)中正大量應(yīng)用;第二代帶感覺的機器人,技術(shù)應(yīng)用基本成熟,工業(yè)應(yīng)用較多;第三代智能機器人,技術(shù)正在發(fā)展過程中,工業(yè)上少量應(yīng)用。
所以,目前工業(yè)上應(yīng)用的機器人主要是第一代和第二代機器人。
當(dāng)前國內(nèi)的工業(yè)機器人市場已經(jīng)逐步走向成熟,且作為全球制造工廠的我國制造業(yè)對產(chǎn)品質(zhì)量和生產(chǎn)率的要求越來越高,人力成本也將不斷提高,所以工業(yè)機器人的應(yīng)用已經(jīng)進入快速發(fā)展時期,其應(yīng)用范圍將進一步擴大。
3 工業(yè)機器人時代對維修電工崗位職業(yè)能力的要求
3.1 自動化生產(chǎn)設(shè)備的廣泛應(yīng)用
工業(yè)機器人是最典型的機電一體化數(shù)字化裝備,其發(fā)展與應(yīng)用對電工行業(yè)的影響較為深刻,主要表現(xiàn)在高性能控制器、伺服電動機、各種傳感器和HMI設(shè)備的大量應(yīng)用上。
目前在自動化生產(chǎn)設(shè)備上,除了常用的繼電器、接觸器等傳統(tǒng)電器設(shè)備,還大量應(yīng)用著以下幾類新型電器:控制模塊,其中以各種PLC控制器應(yīng)用最為廣泛;電動機驅(qū)動裝置,常用的設(shè)備如變頻器、步進電機驅(qū)動器、交流伺服驅(qū)動器等;電動機,以步進電動機和交流電動機為主;傳感器,如光電開關(guān)、接近開光等。
3.2 工業(yè)機器人的發(fā)展應(yīng)用促進了維修電工崗位核心職業(yè)能力的發(fā)展與變化
傳統(tǒng)維修電工崗位職業(yè)能力的重心是繼電器-接觸器電氣系統(tǒng)的安裝調(diào)試與維護,為了適應(yīng)生產(chǎn)的需求,當(dāng)前維修電工崗位的核心職業(yè)能力也必需發(fā)展變化,應(yīng)該把重心定位在以PLC控制器為核心的現(xiàn)代電氣控制系統(tǒng)的安裝調(diào)試與維護上。
從崗位核心職業(yè)能力的要求上看,新的核心職業(yè)能力是對傳統(tǒng)職業(yè)能力的繼承與發(fā)展,對當(dāng)前教學(xué)中維修電工崗位職業(yè)能力的培養(yǎng)提出了更高的要求。
4 維修電工對應(yīng)學(xué)習(xí)領(lǐng)域的發(fā)展與變化
4.1 維修電工的學(xué)習(xí)領(lǐng)域
當(dāng)前高職院校對維修電工學(xué)習(xí)領(lǐng)域的設(shè)計,主要包括電工技術(shù)基本理論與知識、電機拖動與控制基礎(chǔ)、常用電氣控制設(shè)備的使用與維護、電氣制圖等。這些學(xué)習(xí)領(lǐng)域只能滿足傳統(tǒng)繼電器-接觸器電氣控制系統(tǒng)的安裝調(diào)試與維護的需要,不能適應(yīng)當(dāng)前維修電工崗位職業(yè)能力的要求。工業(yè)機器人時代背景下,維修電工對應(yīng)的學(xué)習(xí)領(lǐng)域,需依據(jù)新的崗位核心職業(yè)能力確定,“現(xiàn)代電氣控制系統(tǒng)安裝調(diào)試與維護”對應(yīng)的學(xué)習(xí)領(lǐng)域主要包含電工技術(shù)基本理論與知識、電機拖動與控制基礎(chǔ)知識、PLC控制技術(shù)與應(yīng)用、常用新型電氣設(shè)備的運用和現(xiàn)代電氣控制系統(tǒng)的安裝調(diào)試與維護這五個學(xué)習(xí)領(lǐng)域。
4.2 維修電工學(xué)習(xí)領(lǐng)域的發(fā)展與變化
維修電工對應(yīng)學(xué)習(xí)領(lǐng)域的發(fā)展與變化,是為了培養(yǎng)適應(yīng)市場需求的實用型技術(shù)人才,也是對維修電工教學(xué)內(nèi)容的一次改革。在五個學(xué)習(xí)領(lǐng)域中,有兩個學(xué)習(xí)領(lǐng)域是繼承了傳統(tǒng),另外三個學(xué)習(xí)領(lǐng)域是“現(xiàn)代電氣控制系統(tǒng)安裝調(diào)試與維護”這一新的維修電工崗位核心職業(yè)能力的新要求。維修電工學(xué)習(xí)領(lǐng)域的變化,將直接影響維修電工設(shè)計,必須重構(gòu)其對應(yīng)的體系,學(xué)生才能生成新的維修電工核心職業(yè)能力。
5 工業(yè)機器人時代維修電工學(xué)習(xí)領(lǐng)域設(shè)計
5.1 維修電工課程設(shè)計
本文維修電工課程設(shè)計的總體原則為:理論知識和實踐能力并重,單項技能與綜合能力并重。五個學(xué)習(xí)領(lǐng)域的課程設(shè)計整合為四門主要課程,包括電工技術(shù)基礎(chǔ)課程、電機拖動與控制課程、PLC控制技術(shù)課程和現(xiàn)代電氣控制系統(tǒng)綜合技能課程。
這些課程分為三個類型:基礎(chǔ)理論知識型課程、重點單項技能型課程和綜合技能應(yīng)用型。這三個類型把維修電工核心職業(yè)能力的培養(yǎng)分為三個階段:第一階段是熟悉電工基本理論知識;第二階段是掌握各種重要單項技能;第三階段是綜合技能應(yīng)用生成核心職業(yè)能力。
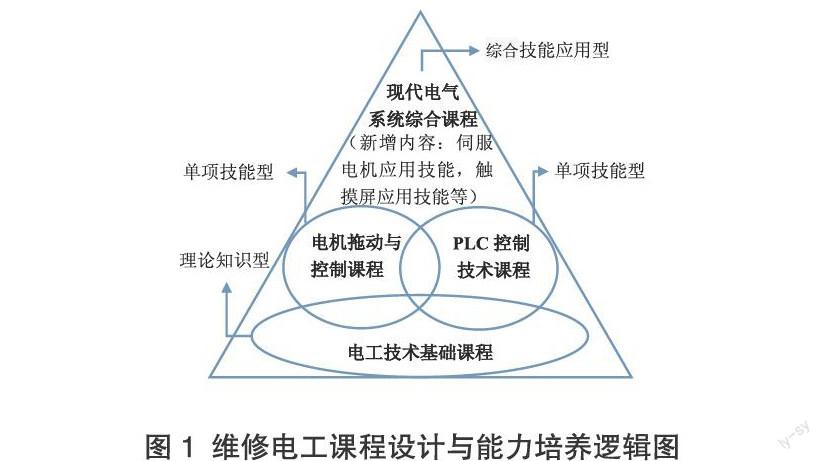
5.2 維修電工課程設(shè)計與能力培養(yǎng)邏輯
工業(yè)機器人時代背景下,維修電工課程設(shè)計與能力培養(yǎng)邏輯,如圖1所示。
圖1 維修電工課程設(shè)計與能力培養(yǎng)邏輯圖
首先,通過電工技術(shù)基礎(chǔ)課程使學(xué)生掌握前人的相關(guān)間接知識和經(jīng)驗;然后,通過電機拖動與控制課程和PLC控制技術(shù)課程讓學(xué)生通過單項技能學(xué)習(xí)快速生成核心職業(yè)能力,如電機的結(jié)構(gòu)原理的認(rèn)知、基本控制電路的安裝調(diào)試能力、PLC程序設(shè)計能力、PLC控制系統(tǒng)安裝與調(diào)試能力;最后,通過現(xiàn)代電氣控制系統(tǒng)綜合技能課程一方面靈活增加學(xué)生對新型電氣設(shè)備(變頻器、伺服驅(qū)動器、傳感器和HMI設(shè)備等)的學(xué)習(xí),另一方面培養(yǎng)學(xué)生現(xiàn)代電氣控制系統(tǒng)安裝調(diào)試與維護的綜合職業(yè)能力。維修電工的課程設(shè)計與能力培養(yǎng)邏輯,以培養(yǎng)學(xué)生可持續(xù)發(fā)展的實踐能力為最終目標(biāo),確保能夠通過課程教學(xué)活動高效生成高技能實用型人才。
6 總結(jié)和展望
維修電工崗位職業(yè)能力的培養(yǎng),是全國各職業(yè)院校現(xiàn)開設(shè)的眾多專業(yè)人才培養(yǎng)方案中所重點要求的培養(yǎng)目標(biāo),所以在工業(yè)機器人時代到來的新形勢下,對維修電工進行研究十分必要和重要。
本文分析了工業(yè)機器人時代背景下維修電工崗位核心職業(yè)能力的變化,探討了維修電工設(shè)計與能力培養(yǎng)路線圖。由此出發(fā),我們可進一步構(gòu)思維修電工實訓(xùn)裝備和一套新的培訓(xùn)方法,讓受教育者在學(xué)習(xí)的熱情中生成核心職業(yè)能力,為我國工業(yè)生產(chǎn)輸送更多的高技能實用型人才。
參考文獻(xiàn):
[1] 孫英飛,羅愛華.我國工業(yè)機器人發(fā)展研究[J].科學(xué)技術(shù)與工程,2012, (12).
[2] 鄧偉.工業(yè)機器人的發(fā)展應(yīng)用現(xiàn)狀及其對電工行業(yè)的影響[J].電氣時代,2013,(9).
猜你喜歡
考試周刊(2016年76期)2016-10-09 10:08:04
考試周刊(2016年76期)2016-10-09 10:04:11
考試周刊(2016年76期)2016-10-09 08:47:08
成才之路(2016年26期)2016-10-08 11:33:49
成才之路(2016年25期)2016-10-08 10:05:54
成才之路(2016年25期)2016-10-08 10:04:29
成才之路(2016年25期)2016-10-08 10:03:04
成才之路(2016年25期)2016-10-08 10:00:36
成才之路(2016年25期)2016-10-08 09:51:08
科技視界(2016年20期)2016-09-29 12:59:03
