純電動汽車的驅動電機系統
2016-09-13 02:33:22北京匯智慧眾汽車技術研究院
汽車維修與保養 2016年3期
關鍵詞:踏板
純電動汽車的驅動電機系統
驅動電機系統是電動汽車三大核心系統之一,是車輛行駛的主要驅動系統,其特性決定了車輛的主要性能指標,直接影響車輛動力性、經濟性和用戶駕乘感受。本文將以北汽新能源EV200車型所采用的驅動電機系統為例來介紹相關技術。
一、驅動電機系統介紹
驅動電機系統由驅動電機、驅動電機控制器(MCU)構成,通過高低壓線束、冷卻管路與整車其他系統連接,如圖1所示。
整車控制器(VCU)根據加速踏板、制動踏板、擋位等信號通過CAN網絡向電機控制器MCU發送指令,實時調節驅動電機的扭矩輸出,以實現整車的怠速、加速、能量回收等功能。
電機控制器能對自身溫度、電機的運行溫度、轉子位置進行實時監測,并把相關信息傳遞給整車控制器VCU,進而調節水泵和冷卻風扇工作,使電機保持在理想溫度下工作。
驅動電機技術指標參數,如表1所示,驅動電機控制器技術參數如表2所示。
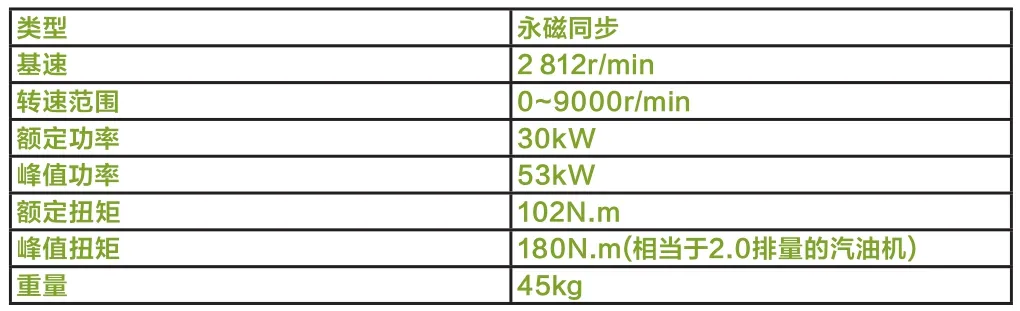
表1 驅動電機技術參數

表2 驅動電機控制器技術參數
1.驅動電機
永磁同步電機是一種典型的驅動電機(圖2),具有效率高、體積小、可靠性高等優點,是動力系統的執行機構,是電能轉化為機械能載體。它依靠內置旋轉變壓器、溫度傳感器(圖3)來提供電機的工作狀態信息,并將電機運行狀態信息實時發送給MCU。
旋轉變壓器檢測電機轉子位置,經過電機控制器內旋變解碼器解碼后,電機控制器可獲知電機當前轉子位置,從而控制相應的IGBT功率管導通,按順序給定子三個線圈通電,驅動電機旋轉。
溫度傳感器的作用是檢測電機繞組溫度,并提信息供給MCU,再由MCU通過CAN線傳給VCU,進而控制水泵工作、水路循環、冷卻電子扇工作,調節電機工作溫度。
驅動電機上有一個低壓接口和三根高壓線(V、U、W)接口,如圖4所示。
其中低壓接口各端子定義如表3所示,電機控制器也正是通過低壓端口獲取的電機溫度信息和電機轉子當前位置信息。

表3 驅動電機低壓接口定義
2.驅動電機控制器
驅動電機控制器MCU結構如圖5所示,它內部采用三相兩電平電壓源型逆變器,是驅動電機系統的控制核心,稱為智能功率模塊,它以IGBT(絕緣柵雙極型晶體管)為核心,輔以驅動集成電路、主控集成電路。MCU對所有的輸入信號進行處理,并將驅動電機控制系統運行狀態信息通過CAN2.0網絡發送給整車控制器VCU。驅動電機控制器內含故障診斷電路,當電機出現異常時,達到一定條件后,它將會激活一個錯誤代碼并發送給VCU整車控制器,同時也會儲存該故障碼和相關數據。
驅動電機控制器主要依靠電流傳感器(圖6)、電壓傳感器、溫度傳感器來進行電機運行狀態的監測,根據相應參數進行電壓、電流的調整控制以及其它控制功能的完成。電流傳感器用于檢測電機工作實際電流,包括母線電流、三相交流電流。電壓傳感器用于檢測供給電機控制器工作的實際電壓,包括動力電池電壓、12V蓄電池電壓。溫度傳感器用于檢測電機控制系統的工作溫度,包括IGBT模塊的溫度。
驅動電機控制器上分為低壓接口和高壓接口(圖7),低壓接口端子定義如表4所示。

表4 驅動電機控制器低壓接口定義
二、驅動電機系統功能
通過驅動電機工作狀態可以了解新能源汽車驅動系統的基本功能,根據駕駛員意愿驅動電機的工作狀態:掛D擋加速行駛時、減速制動時、掛R擋倒車時以及E擋行駛時來了解它的工作過程。
1.D擋加速行駛
駕駛員掛D擋并踩加速踏板,此時擋位信息和加速信息通過信號線傳遞給整車控制器VCU,VCU把駕駛員的操作意圖通過CAN線傳遞給驅動電機控制器MCU,再由驅動電機控制器MCU結合旋變傳感器信息(轉子位置),進而向永磁同步電動機的定子通入三相交流電,三相電流在定子繞組的電阻上產生電壓降。由三相交流電產生的旋轉電樞磁動勢及建立的電樞磁場,一方面切割定子繞組,并在定子繞組中產生感應電動勢;另一方面以電磁力拖動轉子以同步轉速正向旋轉。隨著加速踏板行程不斷加大,電機控制器控制的6個IGBT導通頻率上升,電動機的轉矩隨著電流的增加而增加,因此,起步時基本上擁有最大的轉矩。隨著電動機轉速的增加,電動機的功率也增加,同時電壓也隨之增加。在電動汽車上,一般要求電動機的輸出功率保持恒定,即電動機的輸出功率不隨轉速增加而變化,這要求在電動機轉速增加時,電壓保持恒定,其中永磁同步電機輸出特性曲線如圖8所示。
與此同時,電機控制器也會通過電流傳感器和電壓傳感器,感知電機當前功率、消耗電流大小、電壓大小,并把這些信息數據通過CAN網絡傳送給儀表、整車控制器,其具體工作原理如圖9所示。
2.R擋倒車時
當駕駛員掛R擋時,駕駛員請求信號發給VCU,再通過CAN線發送給MCU,此時MCU結合當前轉子位置(旋變傳感器)信息,通過改變IGBT模塊改變WVU通電順序,進而控制電機反轉。
3.制動時能量回收
駕駛員松開加速踏板時,電機由于慣性仍在旋轉,設車輪轉速為V輪、電機轉速為V電機,設車輪與電機之間固定傳動比為K,當車輛減速時,V輪K<V電機時,電機仍是動力源,隨著電機轉速下降,當 V輪K>V電機時,此時電機由于被車輛拖動而旋轉,此時驅動電動機變為發電機(圖10)。
BMS可以根據電池充電特性曲線(充電電流、電壓變化曲線與電池容量的關系)和采集電池溫度等參數計算出相應的允許最大充電電流。MCU根據電池允許最大充電電流,通過控制IGBT模塊,使“發電機”定子線圈旋轉磁場角速度與電機轉子角速度保持到發電電流不超過允許最大充電電流,以調整發電機向蓄電池充電的電流,同時這也控制了車輛的減速度,具體過程如圖11所示。
當踩下制動踏板時,MCU輸出的電流頻率會急劇下降,饋能電流在MCU的調節下充入高壓電池,當IGBT全部關閉時在當前的反拖速度和模式下為最大饋能狀態,此時MCU對“發電機”沒有實施速度和電流的調整,“發電機”所發的電量全部轉移給蓄電池,由于發電機負載較大,此時車輛減速也較快。在此期間能量回收的原則是:①電池包溫度低于5℃時,能量不回收;②單體電壓在4.05~4.12V時,能量回收6.1kW,單體電壓超過4.12V時,能量不回收,低于4.05V時,能量滿反饋;③SOC大于95%、車速低于30km/h 時沒有能量回收功能,且能量回收及輔助制動力大小與車速和制動踏板行程相關。
4.E擋行駛時
E擋為能量回收擋,在車輛正常行駛時E擋與D擋的根本區別在于MCU和VCU內部程序、控制策略不同。在加速行駛時E擋相對于D擋來說提速較為平緩,蓄電池放電電流也較為平緩,目的是盡可能節省電量以延長行駛距離,而D擋提速較為靈敏,響應較快。在松開加速踏板時,E擋更注重于能量回收,驅動電機被車輪反拖發電時所需的“機械能”牽制了車輛的滑行,從而也起到了一定的制動效果,所以E擋行車時車輛的滑行距離比D擋短。
(供稿:北京匯智慧眾汽車技術研究院)
北京匯智慧眾汽車技術研究院作為中國新能源汽車職業教育先行者,率先在國內推廣新能源汽車職業教育,并開展職業院校師資培訓。2105年該院與北京新能源汽車股份有限公司達成職業教育戰略合作關系,其后與多家汽車檢測設備和教具開發公司合作成立新能源汽車教學課程體系開發聯盟,響應國家新能源戰略發展計劃,常年開設新能源技術多媒體培訓班向廣大師生傳授、分享電動車技術知識及經驗。
猜你喜歡
車主之友(2022年6期)2023-01-30 07:58:16
黃河之聲(2020年4期)2020-12-07 10:48:25
公路與汽運(2020年6期)2020-12-07 02:22:10
黃河之聲(2019年23期)2019-12-17 19:08:43
汽車實用技術(2019年17期)2019-09-21 03:46:32
汽車與駕駛維修(維修版)(2018年8期)2018-09-21 02:48:54
讀寫算·素質教育論壇(2017年16期)2017-08-04 07:52:36
黃河之聲(2017年13期)2017-01-28 13:30:17
教育界·下旬(2016年4期)2016-11-19 22:15:52
北方音樂(2016年22期)2016-02-04 16:52:16