基于高頻正交方波注入法的永磁同步電機(jī)控制研究
2024-05-30 00:00:00周林林珊王孝洪連維釗
電機(jī)與控制學(xué)報(bào) 2024年2期
關(guān)鍵詞:永磁同步電機(jī)


摘 要:
針對(duì)傳統(tǒng)高頻注入法解調(diào)過(guò)程復(fù)雜和觀測(cè)精度受非理想因素時(shí)延影響的不足,提出一種基于高頻正交方波注入法的零低速位置估計(jì)方法。首先,考慮估計(jì)旋轉(zhuǎn)軸系注入的低可靠性,選擇將高頻信號(hào)注入靜止軸系,采用簡(jiǎn)單代數(shù)運(yùn)算提取出高頻響應(yīng)電流,通過(guò)解調(diào)正向虛擬高頻響應(yīng)電流初步估計(jì)轉(zhuǎn)子位置;然后,針對(duì)主要非理想因素進(jìn)行影響分析,在此基礎(chǔ)上,通過(guò)解調(diào)負(fù)向虛擬高頻響應(yīng)電流提取出相位滯后角,完成補(bǔ)償;最后,為避免啟動(dòng)階段位置收斂錯(cuò)誤,通過(guò)獲取電感變化趨勢(shì)判斷出磁極極性。實(shí)驗(yàn)結(jié)果表明,所提算法在各類工況均能穩(wěn)定收斂,且最大平均誤差不超過(guò)1°,說(shuō)明了算法的抗擾性以及準(zhǔn)確性。
關(guān)鍵詞:永磁同步電機(jī);無(wú)位置傳感器控制;正交方波注入法;誤差分析;時(shí)延補(bǔ)償;磁極辨識(shí)
DOI:10.15938/j.emc.2024.02.007
中圖分類號(hào):TM341
文獻(xiàn)標(biāo)志碼:A
文章編號(hào):1007-449X(2024)02-0064-11
收稿日期: 2023-06-29
基金項(xiàng)目:國(guó)家自然科學(xué)基金(62173150);廣東省基礎(chǔ)與應(yīng)用基礎(chǔ)研究基金(2022B1515120003);佛山市順德區(qū)科技創(chuàng)新項(xiàng)目(2230218004224);珠海市產(chǎn)學(xué)研合作項(xiàng)目(ZH22017001210116PWC)
作者簡(jiǎn)介:周 林(1998—),男,碩士研究生,研究方向?yàn)殡娏﹄娮优c傳動(dòng)系統(tǒng)及其控制技術(shù);
林 珊(1971—),女,高級(jí)工程師,研究方向?yàn)楣╇姟㈦姎饧爸悄芑到y(tǒng)工程的設(shè)計(jì)與研究;
王孝洪(1976—),男,教授,博士生導(dǎo)師,研究方向?yàn)殡娏﹄娮优c傳動(dòng)系統(tǒng)及其控制技術(shù);
連維釗(1997—),男,碩士研究生,研究方向?yàn)殡娏﹄娮优c傳動(dòng)系統(tǒng)及其控制技術(shù)。
通信作者:王孝洪
Permanent magnet synchronous motor based on high-frequency orthogonal square wave injection method
ZHOU Lin1, LIN Shan2, WANG Xiaohong1, LIAN Weizhao1
(1.Key Laboratory of Autonomous Systems and Networked Control, Ministry of Education, South China University of Technology, Guangzhou 510640, China; 2.Guangzhou Metro Design and Research Institute Co., Ltd., Guangzhou 510010, China)
Abstract:
A zero-low speed position estimation method based on high frequency (HF) orthogonal square-wave injection was proposed to address the drawbacks of conventional HF injection method, such as the complexity of demodulation process and the observation accuracy being degraded by time delay caused by the nonideal factors. Firstly, considering the low reliability caused by injection into RRF, the HF signal was injected into SRF. A simple algebraic operation was used to extract the HF response current, and the preliminary rotor position was estimated by calculating the HF response currents on the positive virtual rotating axis. Then, on the basis of analyzing the effects of the main nonideal factors, the compensation was completed by calculating the HF response currents on the negative virtual rotating axis. Finally, to avoid position convergence errors during startup, the magnetic polarity was determined by obtaining inductance variation trend. The experimental results show that the proposed algorithm can converge stably under various operating conditions, and the maximum average error does not exceed 1 degree, indicating the practicability and accuracy of the algorithm.
Keywords:permanent magnet synchronous motor; sensorless control; high frequency orthogonal square-wave injection; error analysis; time delay compensation; magnetic polarity identification
0 引 言
永磁同步電機(jī)憑借效率高、功率因數(shù)高、動(dòng)態(tài)性能快和力矩慣量比大等優(yōu)點(diǎn)在工業(yè)領(lǐng)域得到了廣泛應(yīng)用[1]。電機(jī)轉(zhuǎn)子位置的實(shí)時(shí)準(zhǔn)確獲取對(duì)實(shí)現(xiàn)永磁同步電機(jī)矢量控制系統(tǒng)而言至關(guān)重要。傳統(tǒng)矢量控制系統(tǒng)往往通過(guò)加裝位置傳感器來(lái)實(shí)現(xiàn)轉(zhuǎn)子位置信息的獲取,然而位置傳感器的使用會(huì)帶來(lái)額外的器件成本、更高的安裝難度和器件失效可靠性問(wèn)題[2]。為了克服上述缺陷,無(wú)傳感器控制算法得到了廣泛且深入的研究[3-5]。
在過(guò)去的幾十年間,無(wú)傳感器控制算法已經(jīng)發(fā)展出了從零低速域到中高速域運(yùn)行的諸多算法。無(wú)傳感器控制算法根據(jù)適用速域可大致劃分為兩類,分別是適用于中高速域的基于基波模型方法和適用于零低速域的基于信號(hào)注入方法[6]。中高速域下,主要通過(guò)觀測(cè)電機(jī)反電動(dòng)勢(shì)值的方式估計(jì)電機(jī)轉(zhuǎn)子位置,主要方法有滑模觀測(cè)器法[7-9]、模型參考自適應(yīng)法[10-12]、卡爾曼濾波器法[13-14]等。中高速域下系統(tǒng)信噪比高,上述各類方法均能實(shí)現(xiàn)較好位置估計(jì)效果。
零低速域下,建模不確定性、逆變器非線性等因素導(dǎo)致的系統(tǒng)低信噪比,使得基于基波模型的方法失效[15]。所以通常利用電機(jī)凸極性通過(guò)主動(dòng)注入高頻信號(hào)的方式解調(diào)出轉(zhuǎn)子位置,主要方法有高頻脈振注入法、高頻旋轉(zhuǎn)注入法和高頻方波注入法等[15]。零低速域下的位置估計(jì)關(guān)系到電機(jī)能否穩(wěn)定高效運(yùn)行在較低轉(zhuǎn)速以及能否順利啟動(dòng)過(guò)渡到中高速域,是現(xiàn)階段實(shí)現(xiàn)全速域無(wú)傳感器控制的難點(diǎn)[16]。
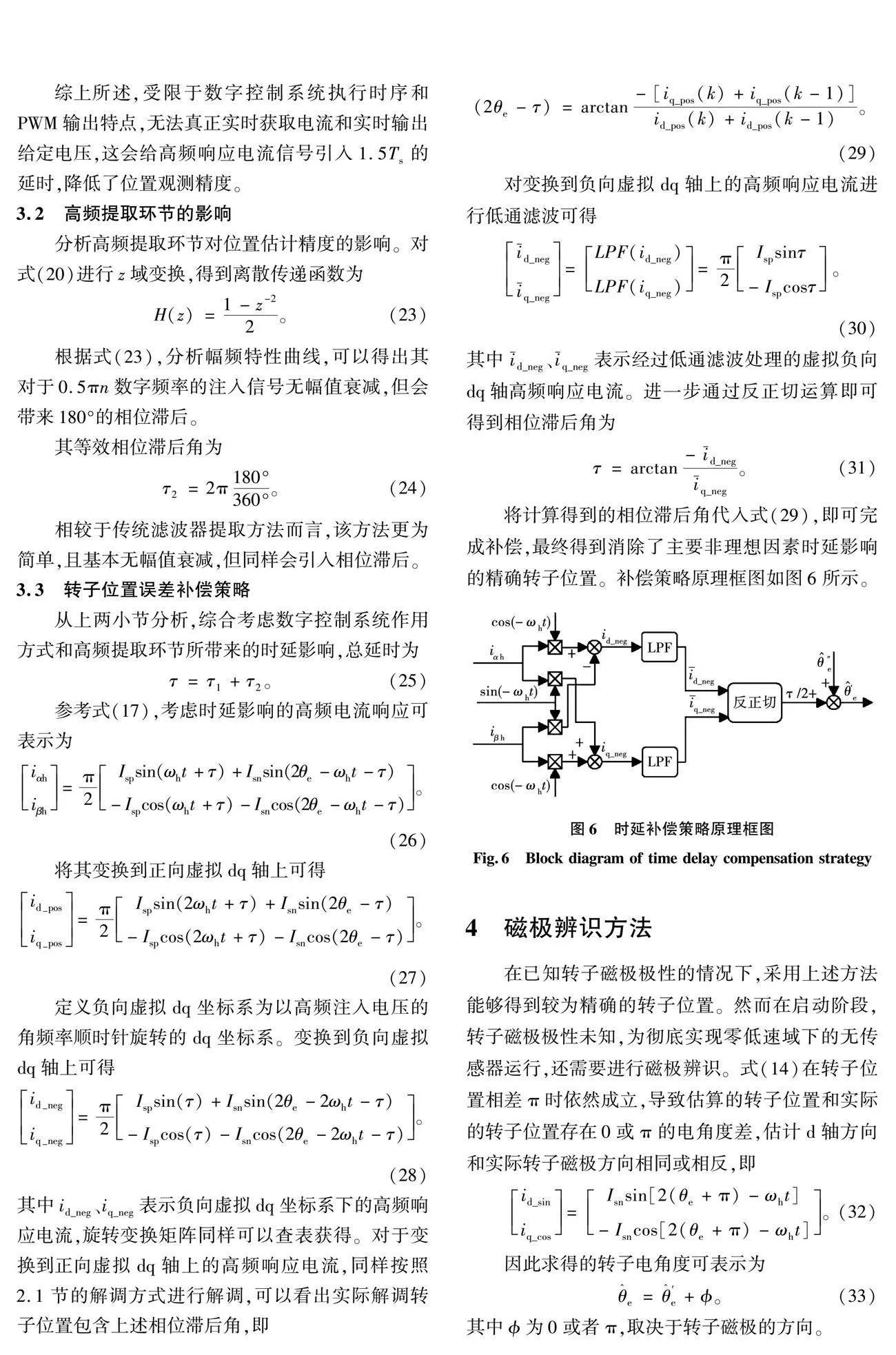
高頻旋轉(zhuǎn)注入法相較于高頻脈振注入法,具有穩(wěn)定性強(qiáng)、收斂時(shí)間短、收斂點(diǎn)不包括q軸和收斂點(diǎn)不易發(fā)散等優(yōu)點(diǎn),廣泛應(yīng)用于永磁同步電機(jī)無(wú)傳感器控制[17]。然而傳統(tǒng)高頻旋轉(zhuǎn)注入法受限于復(fù)雜的注入電壓形式,注入頻率不能太高,否則注入電壓信號(hào)易失真。并且傳統(tǒng)高頻旋轉(zhuǎn)注入法在解調(diào)過(guò)程中,需要使用濾波器分別進(jìn)行高頻電流提取、解調(diào)函數(shù)實(shí)現(xiàn)、鎖相環(huán)濾波等,不僅增加了算法實(shí)現(xiàn)的復(fù)雜程度,還引入了相位滯后,降低了算法的動(dòng)態(tài)性能。文獻(xiàn)[18-19]在高頻旋轉(zhuǎn)注入法的基礎(chǔ)上進(jìn)行改進(jìn),提出了高頻方波注入法,利用方波型電壓取代了正弦型電壓,注入頻率最高可達(dá)控制頻率的1/2,并且完全消除了解調(diào)過(guò)程中濾波器的使用,但注入估計(jì)旋轉(zhuǎn)軸系的方式帶來(lái)了低可靠性的問(wèn)題。文獻(xiàn)[20]在高頻旋轉(zhuǎn)注入法的基礎(chǔ)上進(jìn)行改進(jìn),提出了高頻正交方波注入法,不僅將正弦型電壓改進(jìn)為正交方波型電壓,還采用了靜止軸系注入的方式,提升了系統(tǒng)帶寬,增強(qiáng)了可靠性,但該方法在解調(diào)過(guò)程中仍使用了高通濾波器來(lái)提取高頻響應(yīng)電流。文獻(xiàn)[21]針對(duì)高頻正交方波注入法采用了一種新的解調(diào)算法,利用高頻響應(yīng)電流的二次差分值解調(diào)轉(zhuǎn)子位置,并且在啟動(dòng)階段通過(guò)注入一段低頻正弦信號(hào)將高頻正交方波注入法推廣到零速域,但是該方法并未提及采用的高頻提取方法以及未考慮主要非理想因素對(duì)位置估計(jì)精度的影響。
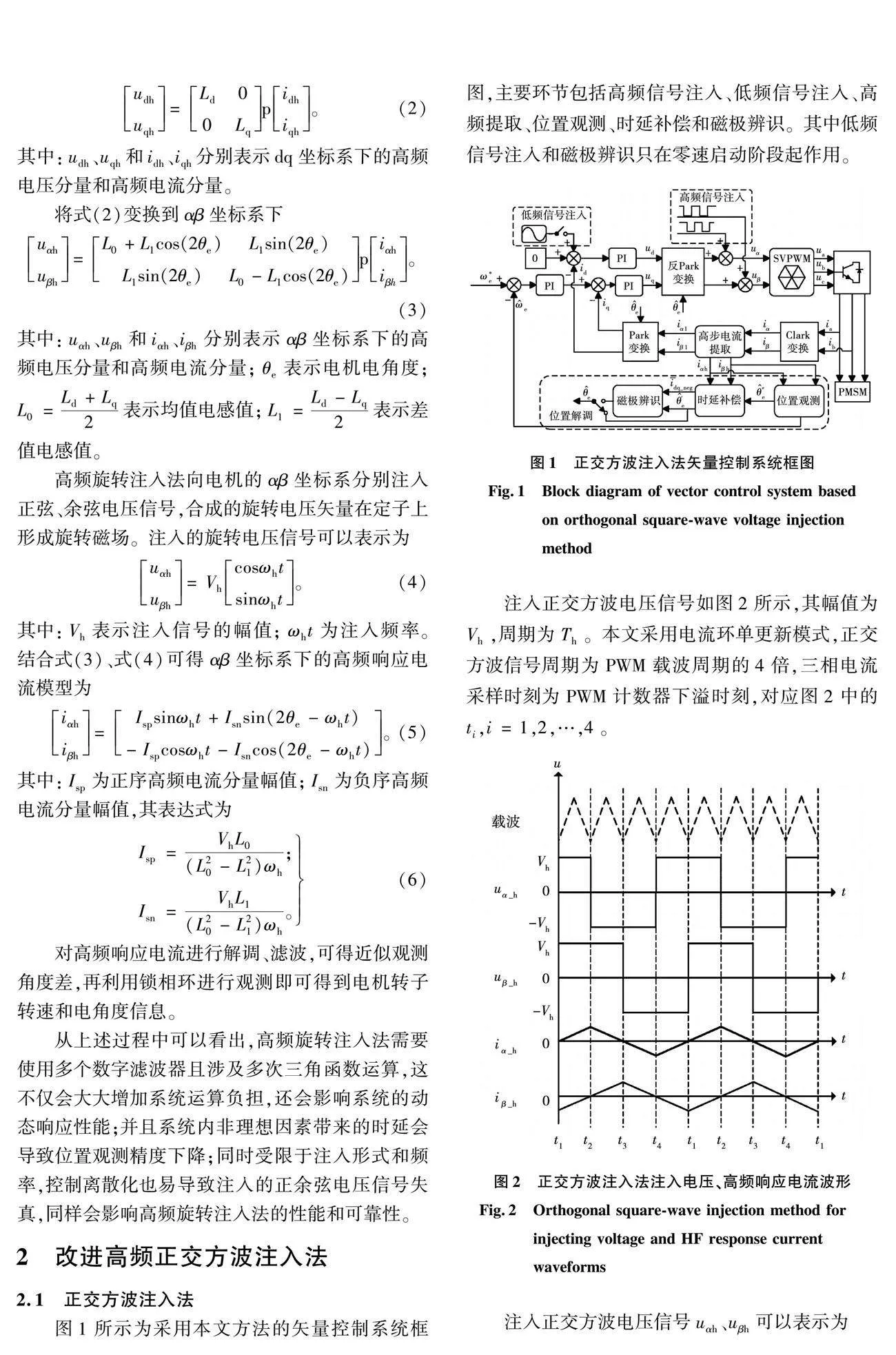
針對(duì)上述問(wèn)題,提出一種基于高頻正交方波注入法的永磁同步電機(jī)零低速無(wú)傳感器位置估計(jì)方法。首先,向電機(jī)靜止軸系注入高頻正交方波電壓信號(hào),采用無(wú)濾波器的高頻提取方法分離高頻響應(yīng)電流和基頻電流,采用基于離散電流的特征分析方法分析高頻響應(yīng)電流,從變換到注入電壓所在的正向虛擬dq軸上的高頻響應(yīng)電流中解調(diào)出轉(zhuǎn)子位置;然后,簡(jiǎn)要分析主要非理想因素所帶來(lái)的影響,在負(fù)向虛擬dq軸上提取出相位滯后角,完成補(bǔ)償;最后,為將方法推廣至零速啟動(dòng)階段,注入一段低頻正弦信號(hào),從電感變化趨勢(shì)中辨識(shí)轉(zhuǎn)子磁極位置。在400 W的電機(jī)實(shí)驗(yàn)平臺(tái)上進(jìn)行實(shí)驗(yàn),驗(yàn)證本文所提方法的有效性和準(zhǔn)確性。
5 實(shí)驗(yàn)結(jié)果及分析
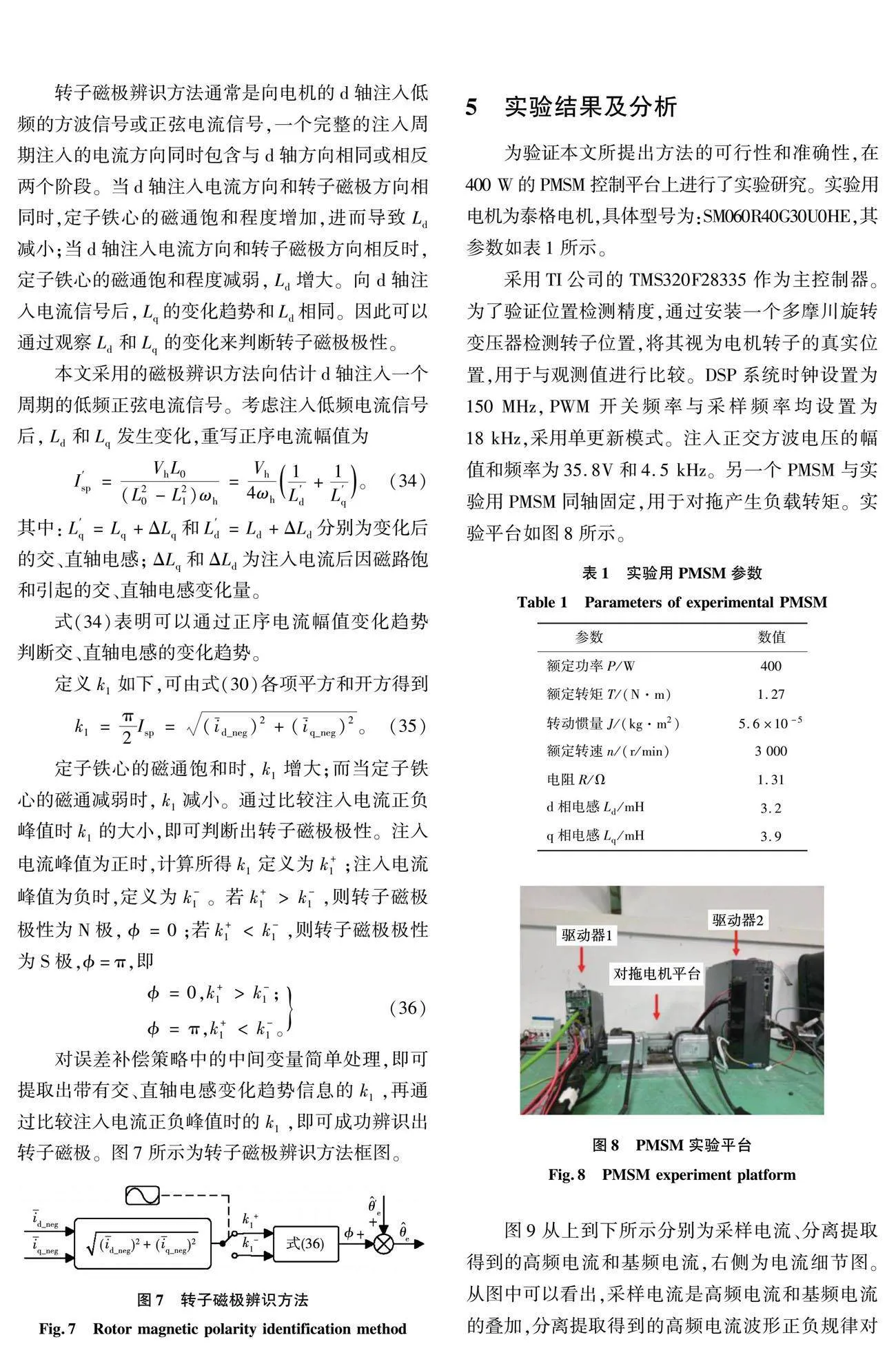
為驗(yàn)證本文所提出方法的可行性和準(zhǔn)確性,在400 W的PMSM控制平臺(tái)上進(jìn)行了實(shí)驗(yàn)研究。實(shí)驗(yàn)用電機(jī)為泰格電機(jī),具體型號(hào)為:SM060R40G30U0HE,其參數(shù)如表1所示。
采用TI公司的TMS320F28335作為主控制器。為了驗(yàn)證位置檢測(cè)精度,通過(guò)安裝一個(gè)多摩川旋轉(zhuǎn)變壓器檢測(cè)轉(zhuǎn)子位置,將其視為電機(jī)轉(zhuǎn)子的真實(shí)位置,用于與觀測(cè)值進(jìn)行比較。DSP系統(tǒng)時(shí)鐘設(shè)置為150 MHz,PWM開(kāi)關(guān)頻率與采樣頻率均設(shè)置為18 kHz,采用單更新模式。注入正交方波電壓的幅值和頻率為35.8V和4.5 kHz。另一個(gè)PMSM與實(shí)驗(yàn)用PMSM同軸固定,用于對(duì)拖產(chǎn)生負(fù)載轉(zhuǎn)矩。實(shí)驗(yàn)平臺(tái)如圖8所示。
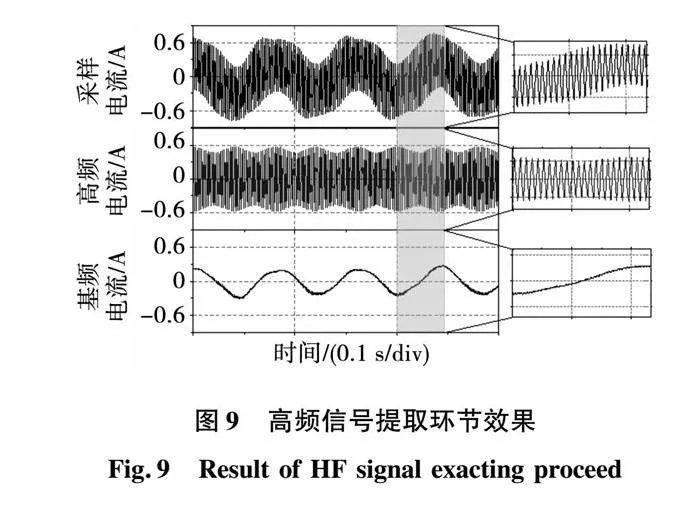
圖9從上到下所示分別為采樣電流、分離提取得到的高頻電流和基頻電流,右側(cè)為電流細(xì)節(jié)圖。從圖中可以看出,采樣電流是高頻電流和基頻電流的疊加,分離提取得到的高頻電流波形正負(fù)規(guī)律對(duì)稱,基頻電流波形較為平滑,說(shuō)明該提取方法能夠有效分離提取出低頻電流和高頻響應(yīng)電流。
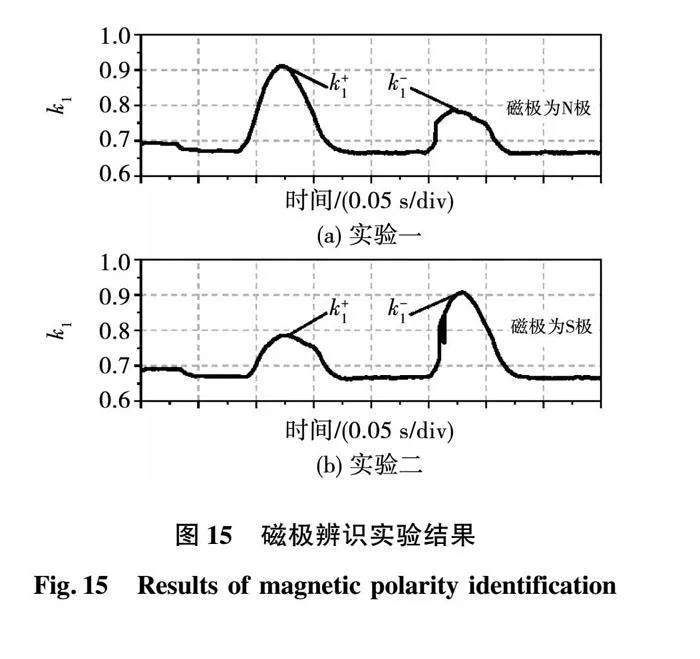
圖10(a)、圖10(b)所示為電機(jī)給定轉(zhuǎn)速為額定轉(zhuǎn)速的5%,不同運(yùn)行方向下,未采用補(bǔ)償策略時(shí)的轉(zhuǎn)子角度及估算誤差波形。正轉(zhuǎn)平均估算角度誤差約0.74 rad,換算角度為42.40°。反轉(zhuǎn)平均估算角度誤差約0.71 rad,換算角度為40.68°。可以看出本文采用的方法無(wú)論正反轉(zhuǎn)都能較好地估算出轉(zhuǎn)子位置,但始終與實(shí)際轉(zhuǎn)子位置存在一定的誤差。
圖11(a)、圖11(b)所示為電機(jī)給定轉(zhuǎn)速為額定轉(zhuǎn)速的5%,不同運(yùn)行方向下,對(duì)估算轉(zhuǎn)子位置進(jìn)行在線補(bǔ)償后的轉(zhuǎn)子角度及估算誤差波形圖。正轉(zhuǎn)平均估算角度誤差約為0.010 rad,換算角度為0.572 9°;反轉(zhuǎn)平均估算角度誤差約為0.015 rad,換算角度為0.859 4°。對(duì)比圖10和圖11,在線補(bǔ)償后不再出現(xiàn)轉(zhuǎn)子位置超前或者滯后于實(shí)際位置的現(xiàn)象,基本重合于電機(jī)實(shí)際角度,說(shuō)明了本文提出的時(shí)延補(bǔ)償策略能夠有效消除主要非理想因素帶來(lái)的影響。
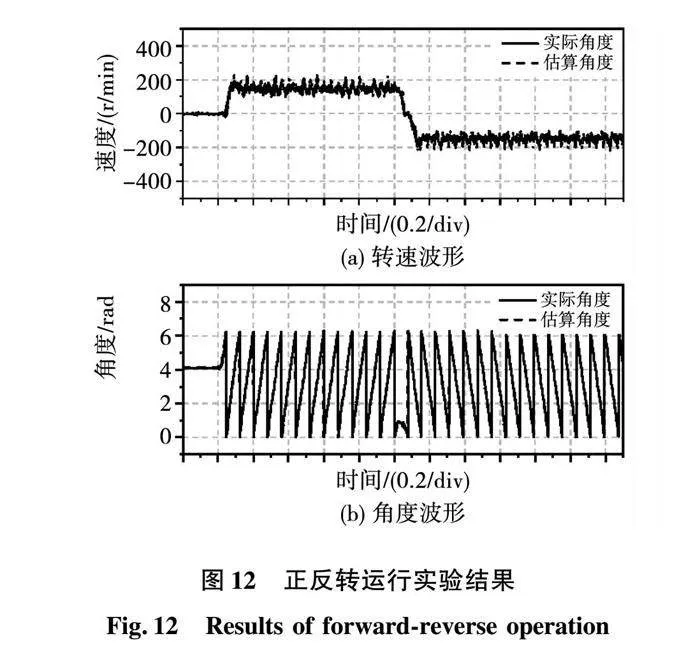
圖12為電機(jī)給定轉(zhuǎn)速為額定轉(zhuǎn)速的5%,正轉(zhuǎn)工況下,突然切換到反轉(zhuǎn)運(yùn)行時(shí)估算角度和轉(zhuǎn)速波形。由圖可知,電機(jī)在穿越零速時(shí)觀測(cè)角度仍能夠較好地跟蹤實(shí)際角度,電機(jī)觀測(cè)轉(zhuǎn)速能夠穩(wěn)定快速地跟蹤實(shí)際轉(zhuǎn)速。整個(gè)過(guò)程平穩(wěn)實(shí)現(xiàn)了正反轉(zhuǎn)兩種工況切換運(yùn)行。
圖13是在電機(jī)給定轉(zhuǎn)速為額定轉(zhuǎn)速的5%,啟動(dòng)帶額定負(fù)載,運(yùn)行中突卸負(fù)載工況下的轉(zhuǎn)速和角度波形。啟動(dòng)前能夠準(zhǔn)確辨識(shí)出電機(jī)轉(zhuǎn)子的初始位置,啟動(dòng)后轉(zhuǎn)速略有超調(diào),隨后穩(wěn)定運(yùn)行在給定轉(zhuǎn)速。突卸負(fù)載時(shí),電機(jī)轉(zhuǎn)速超調(diào),但最終重新收斂穩(wěn)定運(yùn)行在給定轉(zhuǎn)速。整個(gè)運(yùn)行過(guò)程中估算角度和轉(zhuǎn)速始終穩(wěn)定收斂,說(shuō)明了本文提出方法在負(fù)載變化的情況具有良好的動(dòng)態(tài)性能。
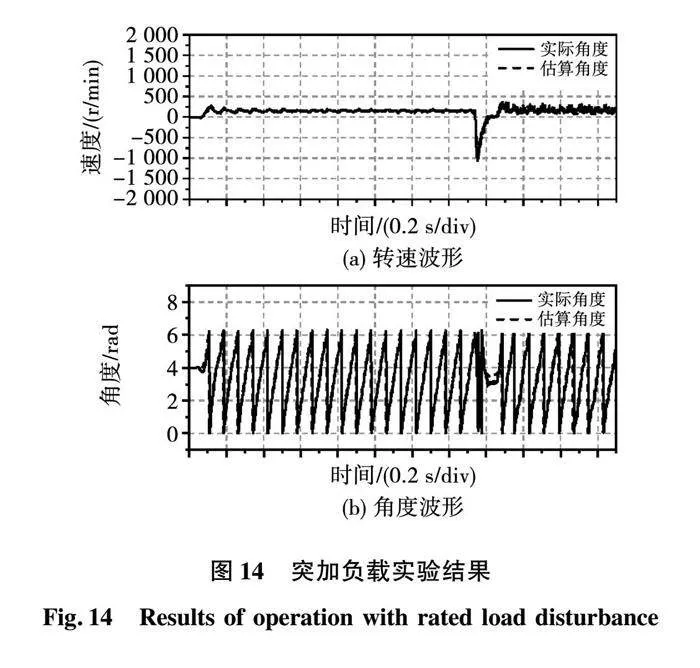
圖14是在電機(jī)給定轉(zhuǎn)速為額定轉(zhuǎn)速的5%,空載運(yùn)行中突加額定負(fù)載下的轉(zhuǎn)速和角度波形。電機(jī)空載啟動(dòng)穩(wěn)定運(yùn)行在給定轉(zhuǎn)速,穩(wěn)定運(yùn)行一段時(shí)間后突加額定負(fù)載,電機(jī)轉(zhuǎn)速迅速大幅跌落至零速以下,但觀測(cè)角度仍然能夠持續(xù)穩(wěn)定收斂于實(shí)際角度,隨后轉(zhuǎn)速逐漸回升至給定轉(zhuǎn)速。整個(gè)過(guò)程中觀測(cè)角度穩(wěn)定跟蹤實(shí)際轉(zhuǎn)子角度,即使轉(zhuǎn)速跌落至零速以下。
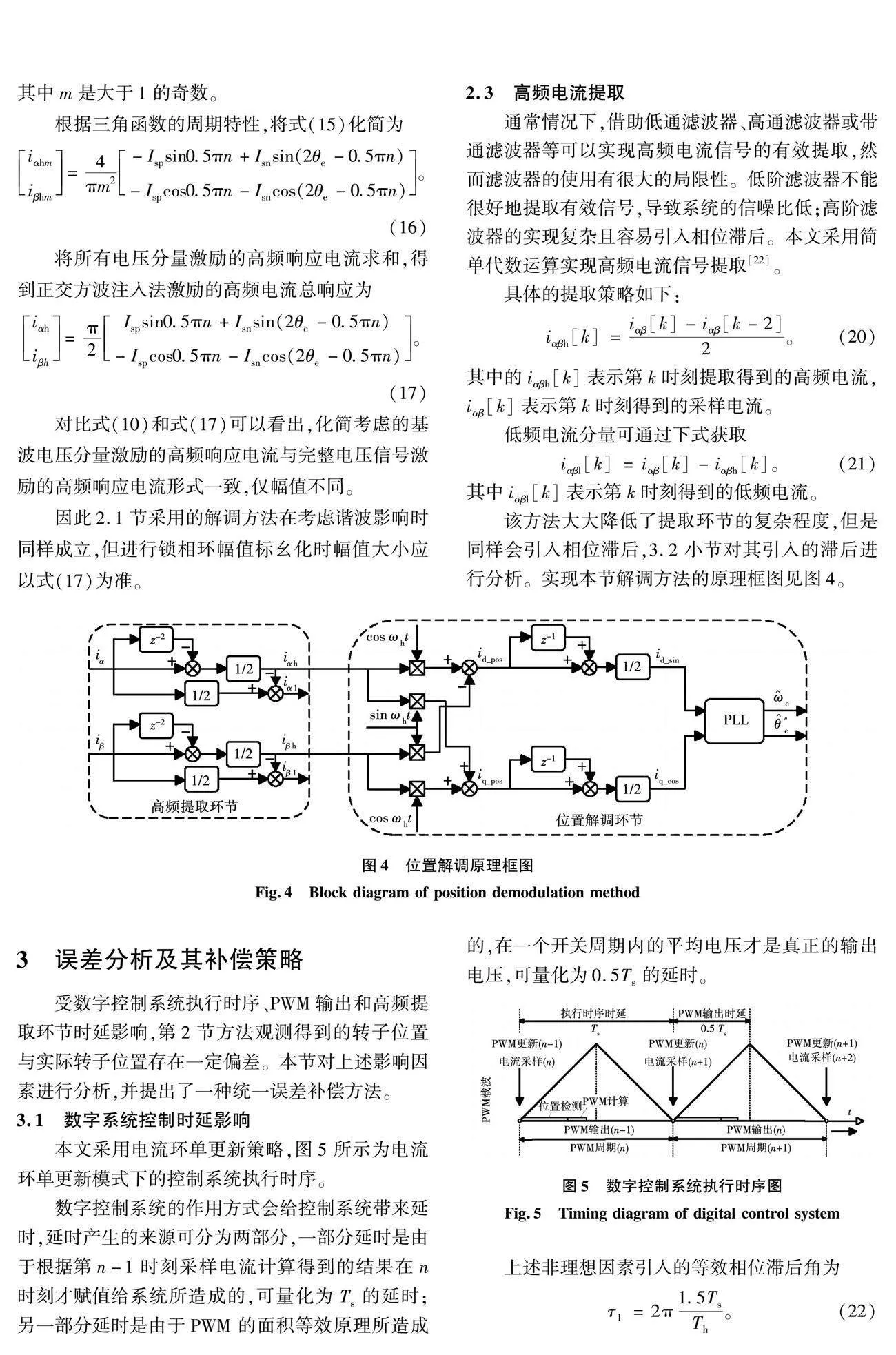
磁極辨識(shí)階段注入的低頻正弦信號(hào),幅值為0.3 A。圖15(a)、圖15(b)顯示的是不同磁極極性下計(jì)算得到的k+1與k-1。當(dāng)實(shí)際磁極極性為N極時(shí),k+1gt;k-1,辨識(shí)得到的磁極極性也為N極;當(dāng)實(shí)際磁極極性為S極時(shí),辨識(shí)得到的磁極極性同樣正確。驗(yàn)證了本文設(shè)計(jì)的磁極辨識(shí)方法的準(zhǔn)確性。
6 結(jié) 論
本文主要對(duì)高頻正交方波注入法在永磁同步電機(jī)零低速無(wú)傳感器系統(tǒng)上的應(yīng)用進(jìn)行了研究。將傳統(tǒng)基于濾波器的高頻提取方法替換為簡(jiǎn)單有效的代數(shù)運(yùn)算提取方法;針對(duì)主要非理想因素設(shè)計(jì)了一種統(tǒng)一時(shí)延補(bǔ)償策略,消除了主要非理想因素的影響,大大提高了觀測(cè)精度;設(shè)計(jì)了一種磁極辨識(shí)方法,解決了啟動(dòng)階段轉(zhuǎn)子位置收斂錯(cuò)誤的問(wèn)題,實(shí)現(xiàn)了只需一種方法即可覆蓋零低速域無(wú)傳感器運(yùn)行。實(shí)驗(yàn)結(jié)果表明,本文設(shè)計(jì)的補(bǔ)償策略能夠消除主要非理想因素的影響;設(shè)計(jì)的磁極辨識(shí)方法能夠準(zhǔn)確辨識(shí)磁極位置。
參 考 文 獻(xiàn):
[1] 陳坤,王輝,吳軒等.一種新型的內(nèi)置式永磁同步電機(jī)無(wú)位置傳感器低速控制策略[J].中國(guó)電機(jī)工程學(xué)報(bào),2017,37(20):6083.
CHEN Kun, WANG Hui, WU Xuan, et al. A novel position sensorless control for interior permanent magnet synchronous motor at low speed[J].Proceedings of the CSEE,2017,37(20):6083.
[2] 魯家棟,劉景林.內(nèi)置式永磁同步電機(jī)低速無(wú)位置傳感器控制[J].電機(jī)與控制學(xué)報(bào),2018,22(3):88.
LU Jiadong, LIU Jinglin. Low-speed position sensorless control of IPMSM based on high frequency signal injection[J].Electric Machines and Control,2018,22(3):88.
[3] ZHANG Zeyu, SHEN Anwen, LI Peihe, et al. MTPA-based high frequency square wave voltage signal injection strategy for IPMSM control[J].Journal of Power Electronics,2021(21):1461.
[4] WANG Gaolin, VALLA M, SOLSONA J. Position sensorless permanent magnet synchronous machine drives—a review[J].IEEE Transactions on Industrial Electronics,2022,67(7):5830.
[5] 吳偉亮,楊合民,胡靜,等.內(nèi)置式永磁同步電機(jī)無(wú)位置傳感器控制研究[J].大電機(jī)技術(shù),2021(3):24.
WU Weiliang, YANG Hemin, HU Jing, et al. Research on position sensorless control of interior permanent magnet synchronous motor[J].Large Electric Machine and Hydraulic Turbine,2021(3):24.
[6] 劉計(jì)龍,肖飛,沈洋,等.永磁同步電機(jī)無(wú)位置傳感器控制技術(shù)研究綜述[J].電工技術(shù)學(xué)報(bào),2017,32(16):76.
LIU Jilong, XIAO Fei, SHEN Yang, et al. Position sensorless control technology of permanent-magnet synchronous motor a review[J].Transactions of China Electrotechnical Society,2017,32(16):76.
[7] 彭思齊,蔣雨函,蘭志勇,等.永磁同步電機(jī)新型指數(shù)型自適應(yīng)滑模觀測(cè)器無(wú)傳感器控制[J].電機(jī)與控制學(xué)報(bào),2022,26(5):104.
PENG Siqi, JIANG Yuhan, LAN Zhiyong, et al. Sensorless control of new exponential adaptive sliding mode observer for permanent magnet synchronous motor[J]. Electric Machines and Control,2022,26(5):104.
[8] LU W, ZHANG Z, DONG W, et al. A new load torque identification sliding mode observer for permanent magnet synchronous machine drive system[J]. IEEE Transactions on Power Electronics,2019,34(8):7852.
[9] 王琛琛,茍立峰,周明磊,等.基于改進(jìn)的離散域二階滑模觀測(cè)器的內(nèi)置式永磁同步電機(jī)無(wú)位置傳感器控制[J].電工技術(shù)學(xué)報(bào),2023,38(2):387.
WANG Chenchen, GOU Lifeng, ZHOU Minglei, et al. Sensorless control of IPMSM based on improved discrete second-order sliding mode observer[J]. Transactions of China Electrotechnical Society,2023,38(2):387.
[10] 林茂,李穎暉,吳辰,等.基于滑模模型參考自適應(yīng)系統(tǒng)觀測(cè)器的永磁同步電機(jī)預(yù)測(cè)控制[J].電工技術(shù)學(xué)報(bào),2017,32(6):156.
LIN Mao, LI Yinghui, WU Chen, et al. A motor" reference adaptive system based sliding mode observer for model predictive controlled permanent magnet synchronous motor drive[J].Transactions of China Electrotechnical Society,2017,32(6):156.
[11] 張懿,徐斌,魏海峰,等.新型模型參考自適應(yīng)的PMSM無(wú)差拍電流預(yù)測(cè)控制[J].電機(jī)與控制學(xué)報(bào),2023,27(9):157.
ZHANG Yi, XU Bin, WEI Haifeng, et al. New model reference adaptive deadbeat predictive current control of PMSM[J].Electric Machines and Control,2023,27(9):157.
[12] 李爭(zhēng),安金峰,肖宇,等.基于自適應(yīng)觀測(cè)器的永磁同步直線電機(jī)模型預(yù)測(cè)控制系統(tǒng)設(shè)計(jì)[J].電工技術(shù)學(xué)報(bào),2021,36(6):1190.
LI Zheng, AN Jinfeng, XIAO Yu, et al. Design of model predictive control system for permanent magnet synchronous linear motor based on adaptive observer[J].Transactions of China Electrotechnical" Society,2021,36(6):1190.
[13] QUANG N K, HIEU N T, HUNTER G P, et al. FPGA-based sensorless PMSM speed control" using reduced-order extended Kalman filters[J].IEEE Transactions on Industrial Electronics,2014,61(12):65.
[14] 李洪鳳,徐浩博,徐越.擴(kuò)展卡爾曼濾波參數(shù)辨識(shí)下永磁同步電機(jī)模型預(yù)測(cè)轉(zhuǎn)矩控制[J].電機(jī)與控制學(xué)報(bào),2023,27(9):19.
LI Hongfeng, XU Haobo, XU Yue. Model prediction torque control of PMSM based on extended Kalman filter parameter identification[J].Electric Machines and Control,2023,27(9):19.
[15] DONG Shifan, ZHOU Minglei, YOU Xiaojie, et al. A sensorless control strategy of injecting HF voltage into d-axis for IPMSM in full speed range[J]. IEEE Transactions on Power Electronics,2022,37(11):13587.
[16] 李星雨,杜錦華,梁得亮,等.基于改進(jìn)脈振注入法的永磁直線電機(jī)無(wú)傳感器低速控制[J].電機(jī)與控制學(xué)報(bào),2018,22(12):31.
LI Xingyu, DU Jinhua, LIANG Deliang, et al. Sensorless control of PMLSM based on fluctuating high-frequency signal injection at low speed[J]. Electric Machines and Control,2018,22(12):31.
[17] 李文真,劉景林.考慮磁路飽和及交叉耦合效應(yīng)的內(nèi)置式永磁同步電機(jī)無(wú)傳感器優(yōu)化方法[J].電工技術(shù)學(xué)報(bào),2020,35(21):4465.
LI Wenzhen, LIU Jinglin. An improved sensorless method of IPMSM considering magnetic saturation and cross-coupling effect[J].Transactions of China" Electrotechnical Society,2020,35(21):4465.
[18] YOON Y D, SUL S K, MORIMOTO S, et al. High-bandwidth sensorless algorithm for AC machines based on square-wave-type voltage injection[J]. IEEE Transactions on Industry Applications,2011,47(3):1361.
[19] KIM S H, PARK N C. Simple sensorless algorithm for interior permanent magnet synchronous motors based on high-frequency voltage injection method[J]. IET Electric Power Applications,2014,8(2):68.
[20] WANG Gaolin, XIAO Dianxun, ZHANG Guoqiang,et al. Sensorless control scheme of IPMSMs using HF orthogonal square-wave voltage injection into a stationary reference frame[J]. IEEE Transactions on Power Electronics,2019,34(3):2573.
[21] 姜燕,劉思美,羅德榮,等.基于高頻正交方波電壓注入的永磁同步電機(jī)初始位置辨識(shí)[J].電工技術(shù)學(xué)報(bào),2019,34(19):4006.
JIANG Yan, LIU Simei, LUO Derong, et al. Rotor initial position identification based on the HF orthogonal square-wave voltage injection[J].Transactions of China Electrotechnical Society,2019,34(19):4006.
[22] 張國(guó)強(qiáng),王高林,徐殿國(guó).基于無(wú)濾波器方波信號(hào)注入的永磁同步電機(jī)初始位置檢測(cè)方法[J].電工技術(shù)學(xué)報(bào),2017,32(13):165.
ZHANG Guoqiang, WANG Gaolin, XU Dianguo. Filterless square-wave injection based initial position detection for permanent magnet synchronous machines[J].Transactions of China Electrotechnical Society,2017,32(13):165.
(編輯:劉素菊)
猜你喜歡
現(xiàn)代電子技術(shù)(2017年1期)2017-02-16 11:49:32
汽車工程學(xué)報(bào)(2016年5期)2017-01-16 02:42:50
計(jì)算技術(shù)與自動(dòng)化(2016年4期)2017-01-11 14:06:23
電子技術(shù)與軟件工程(2016年19期)2016-12-19 18:43:28
中國(guó)科技博覽(2016年15期)2016-08-23 00:59:37
電腦知識(shí)與技術(shù)(2016年13期)2016-06-29 21:41:37
科技視界(2016年12期)2016-05-25 11:07:56
電腦知識(shí)與技術(shù)(2016年2期)2016-03-22 22:21:46
電腦知識(shí)與技術(shù)(2016年1期)2016-03-22 15:49:38
哈爾濱理工大學(xué)學(xué)報(bào)(2015年6期)2016-02-18 00:26:49
