工業(yè)機(jī)器人工作站系統(tǒng)集成工學(xué)結(jié)合課程開發(fā)
2016-06-30 18:35:47梁舒王清于娜
科技視界 2016年15期
關(guān)鍵詞:課程開發(fā)
梁舒+王清+于娜
【摘 要】在工學(xué)結(jié)合課程體系中,典型工作任務(wù)是課程開發(fā)的核心環(huán)節(jié),一般一門專業(yè)課對應(yīng)一項(xiàng)典型工作任務(wù),開設(shè)專業(yè)課的目的是為學(xué)生勝任某項(xiàng)典型工作任務(wù)奠定基礎(chǔ)。本文結(jié)合邢臺職業(yè)技術(shù)學(xué)院工業(yè)機(jī)器人技術(shù)專業(yè)《工業(yè)機(jī)器人工作站系統(tǒng)集成》這門課程工學(xué)結(jié)合開發(fā)過程,介紹了課程定位、典型工作任務(wù)分析、學(xué)習(xí)目標(biāo)確定、學(xué)習(xí)內(nèi)容選取、學(xué)習(xí)情境與學(xué)習(xí)內(nèi)容設(shè)計(jì)五個方面的內(nèi)容。
【關(guān)鍵詞】工業(yè)機(jī)器人;工學(xué)結(jié)合;課程開發(fā)
【Abstract】In curriculum system combine with work and study, typical tasks are the core areas of curriculum development, generally a course correspondence a typical tasks, the creation of specialized courses are intended for students to be competent to lay the foundation of an typical tasks. In this paper, Xingtai Polytechnic College Robotics professional“industrial robot workstation systems integration” course combining learning with the development process, describes the course location, typical tasks analysis, learning objectives identified learning content selection, learning contexts and learning content design five content aspects.
【Key words】Industrial Robot; Combination of Work and Study; Course Development
0 前言
目前,工業(yè)機(jī)器人已在眾多領(lǐng)域得到了應(yīng)用。其中,汽車、電子產(chǎn)品、冶金、化工塑料、橡膠等行業(yè)是中國使用機(jī)器人最多的幾個行業(yè),未來幾年,隨著企業(yè)轉(zhuǎn)型升級的迫切需要和勞動力成本的不斷提高,以及國家的戰(zhàn)略需求,中國機(jī)器人市場增長潛力會非常巨大。對于高職院校來說,開設(shè)工業(yè)工業(yè)機(jī)器人技術(shù)專業(yè),應(yīng)以培養(yǎng)工業(yè)機(jī)器人調(diào)試工程師和操作及維護(hù)人員為主要目標(biāo)。培養(yǎng)的學(xué)生應(yīng)具有扎實(shí)的工業(yè)機(jī)器人理論知識基礎(chǔ)、熟練地工業(yè)機(jī)器人操作能力和豐富地工業(yè)機(jī)器人調(diào)試與維護(hù)經(jīng)驗(yàn)。課程開發(fā)與實(shí)施是影響人才培養(yǎng)質(zhì)量的重要環(huán)節(jié),應(yīng)用工學(xué)結(jié)合的開發(fā)理念:為了工作而學(xué)習(xí),學(xué)習(xí)的內(nèi)容是工作,通過工作實(shí)現(xiàn)學(xué)習(xí),可以有效提高職業(yè)教育人才的培養(yǎng)質(zhì)量。
1 課程定位
本課程是工業(yè)機(jī)器人技術(shù)專業(yè)的必修課程,工業(yè)機(jī)器人工作站包括工業(yè)機(jī)器人系統(tǒng)及外圍控制系統(tǒng),具體涉及工業(yè)機(jī)器人搬運(yùn)工作站、焊接工作站、去毛刺工作站和上下料工作站。通過該課程的學(xué)習(xí),使學(xué)生掌握工業(yè)機(jī)器人的操作、工業(yè)機(jī)器人的接口技術(shù)、外圍設(shè)備控制系統(tǒng)的設(shè)計(jì)、工業(yè)機(jī)器人的調(diào)試和維護(hù)等能力,進(jìn)一步可獲得工業(yè)機(jī)器人編程員證書。《工業(yè)機(jī)器人工作站系統(tǒng)集成》是一門專業(yè)專項(xiàng)能力課程,它涉及自動控制、計(jì)算機(jī)、傳感器、電子技術(shù)和機(jī)械工程等多種學(xué)科的內(nèi)容,該課程的核心技能是工業(yè)機(jī)器人的工作站的設(shè)計(jì)、調(diào)試和維護(hù)應(yīng)用技能,滿足工業(yè)機(jī)器人及系統(tǒng)的安裝、調(diào)試、運(yùn)行、維護(hù)等崗位群的需要。
2 典型工作任務(wù)分析
根據(jù)專業(yè)調(diào)研資料,在汽車、機(jī)械加工、新能源等行業(yè),職業(yè)崗位主要分成3類:工業(yè)機(jī)器人示教編程、工業(yè)機(jī)器人系統(tǒng)維護(hù)(包括工業(yè)機(jī)器人焊接系統(tǒng)維護(hù)崗和工業(yè)機(jī)器人機(jī)床上下料系統(tǒng)維護(hù)崗)、工業(yè)機(jī)器人系統(tǒng)集成(包括工業(yè)機(jī)器人工裝輔助設(shè)計(jì)崗和工業(yè)機(jī)器人通用系統(tǒng)集成崗)。其中本門課程的開發(fā)就是基于工業(yè)機(jī)器人系統(tǒng)集成這個典型工作任務(wù)進(jìn)行的。具體的典型工作任務(wù)包括如下幾個方面。
(1)對機(jī)器人操作對象工裝要求進(jìn)行分析;
(2)工裝系統(tǒng)機(jī)械機(jī)構(gòu)輔助設(shè)計(jì);
(3)工裝系統(tǒng)電氣控制系統(tǒng)設(shè)計(jì);
(4)工裝機(jī)電系統(tǒng)聯(lián)調(diào);
(5)工裝系統(tǒng)說明文件編制。
(6)工業(yè)機(jī)器人工作站方案輔助設(shè)計(jì);
(7)工業(yè)機(jī)器人工作站系統(tǒng)仿真輔助設(shè)計(jì);
(8)工業(yè)機(jī)器人工作站主控系統(tǒng)程序輔助設(shè)計(jì);
(9)工業(yè)機(jī)器人系統(tǒng)程序示教;
(10)工業(yè)機(jī)器人工作站系統(tǒng)說明文件編制。
3 學(xué)習(xí)目標(biāo)確定
工學(xué)結(jié)合專業(yè)課學(xué)習(xí)目標(biāo)是對學(xué)生勝任該課程對應(yīng)的典型工作任務(wù)所預(yù)期達(dá)到的程度。經(jīng)過對典型工作任務(wù)的歸納總結(jié),學(xué)完本課程后,學(xué)生應(yīng)當(dāng)能夠從事工業(yè)機(jī)器人工作站系統(tǒng)集成的工作,具體包括如下:
(1)能分析客戶需求情況;
(2)能根據(jù)客戶需求情況選擇工業(yè)機(jī)器人;
(3)能根據(jù)客戶需求選擇外圍控制系統(tǒng);
(4)能設(shè)計(jì)機(jī)器人與主控的基本接口;
(5)能針對客戶需求編制基本設(shè)計(jì)方案;
(6)能使用工業(yè)機(jī)器人仿真軟件進(jìn)行系統(tǒng)仿真;
(7)能使用電氣仿真軟件進(jìn)行控制系統(tǒng)仿真;
(8)能編制基本主控系統(tǒng)程序;
(9)能根據(jù)對象對機(jī)器人視覺系統(tǒng)進(jìn)行基本設(shè)置;
(10)會設(shè)置工業(yè)機(jī)器人坐標(biāo)系統(tǒng);
(11)會設(shè)置工業(yè)機(jī)器人作業(yè)原點(diǎn);
(12)會使用工業(yè)機(jī)器人常用指令;
(13)會編制工業(yè)機(jī)器人工作站基本使用說明;
(14)會編制工業(yè)機(jī)器人工作站系統(tǒng)基本維護(hù)說明。
4 學(xué)習(xí)內(nèi)容確定
工學(xué)結(jié)合課程體系下的學(xué)習(xí)內(nèi)容和實(shí)際工作有著直接的聯(lián)系,結(jié)合工業(yè)機(jī)器人工作站系統(tǒng)集成的學(xué)習(xí)任務(wù)和實(shí)際教學(xué)的可操作性,提煉出四種典型的工業(yè)機(jī)器人工作站,每種工作站的學(xué)習(xí)內(nèi)容如下所示。
4.1 搬運(yùn)機(jī)器人工作站
搬運(yùn)機(jī)器人工作站的學(xué)習(xí)內(nèi)容包括:搬運(yùn)機(jī)器人的選型,搬運(yùn)組件的選型、安裝及調(diào)試;外圍控制系統(tǒng)設(shè)計(jì)及部署;搬運(yùn)工具TCP參數(shù)設(shè)置;搬運(yùn)機(jī)器人離線編程仿真;搬運(yùn)機(jī)器人工作站維護(hù)與保養(yǎng)。
4.2 焊接機(jī)器人工作站
焊接機(jī)器人工作站的學(xué)習(xí)內(nèi)容包括:焊接機(jī)器人的選型,焊接組件的選型、安裝及調(diào)試;外圍控制系統(tǒng)設(shè)計(jì)及部署;焊接工具TCP參數(shù)設(shè)置;平面焊接軌跡編程;焊接機(jī)器人離線編程仿真;復(fù)雜焊接軌跡編程;焊接機(jī)器人工作站維護(hù)與保養(yǎng)。
4.3 去毛刺機(jī)器人工作站
去毛刺機(jī)器人工作站的學(xué)習(xí)內(nèi)容包括:去毛刺機(jī)器人的選型,去毛刺組件選型、安裝及調(diào)試;外圍控制系統(tǒng)設(shè)計(jì)及部署;浮動去毛刺工具TCP參數(shù)設(shè)置;簡單輪廓軌跡編程;去毛刺機(jī)器人離線編程仿真;去毛刺機(jī)器人工作站維護(hù)與保養(yǎng)。
4.4 上下料機(jī)器人工作站
上下料機(jī)器人工作站的學(xué)習(xí)內(nèi)容包括:機(jī)器人機(jī)床上下料系統(tǒng)安裝調(diào)試;機(jī)器人上下料系統(tǒng)外部控制程序編制;工業(yè)機(jī)器人示教編程;機(jī)器人機(jī)床上下料系統(tǒng)維護(hù)保養(yǎng)。
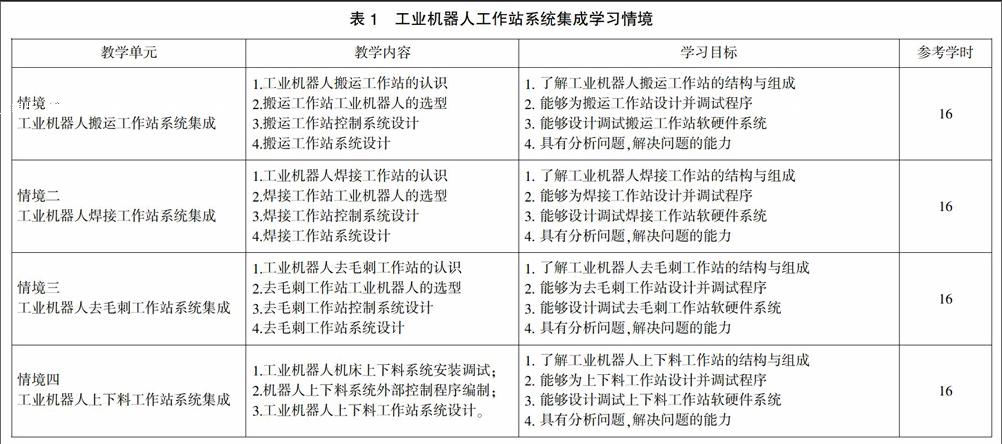
5 學(xué)習(xí)情境和學(xué)習(xí)任務(wù)設(shè)計(jì)
在學(xué)習(xí)目標(biāo)和學(xué)習(xí)內(nèi)容的基礎(chǔ)上,進(jìn)行學(xué)習(xí)情境的劃分及排序,確定各學(xué)習(xí)情境的學(xué)習(xí)任務(wù)構(gòu)成學(xué)習(xí)單元。工業(yè)機(jī)器人工作站系統(tǒng)集成的學(xué)習(xí)情境如表1所示。
6 結(jié)語
綜上所述,在工業(yè)機(jī)器人工作站系統(tǒng)集成的開發(fā)過程中,始終堅(jiān)持了工學(xué)結(jié)合專業(yè)課的開發(fā)是以該課程對應(yīng)的典型工作任務(wù)為起點(diǎn),基于典型工作任務(wù)分析,結(jié)合學(xué)校實(shí)際條件,確定課程學(xué)習(xí)目標(biāo),梳理支撐學(xué)習(xí)目標(biāo)的學(xué)習(xí)內(nèi)容,劃分學(xué)習(xí)情境,以任務(wù)為載體將學(xué)習(xí)內(nèi)容合理組織起來,并細(xì)化任務(wù)承載的單元學(xué)習(xí)目標(biāo)和學(xué)習(xí)內(nèi)容。
【參考文獻(xiàn)】
[1]劉彩琴.職業(yè)教育工學(xué)結(jié)合課程開發(fā)與實(shí)施[M].北京:北京師范大學(xué)出版社,2014.
[2]牛祥永.高職“工業(yè)機(jī)器人安裝與調(diào)試”課程開發(fā)和實(shí)踐[J].職業(yè)教育研究,2014,3:86-90.
[3]楊薇,葉暉,胡威.仿真教學(xué)應(yīng)用在工業(yè)機(jī)器人技術(shù)課程教學(xué)中的必要性[J]. 科技視界,2014,32:18.
[責(zé)任編輯:楊玉潔]
猜你喜歡
亞太教育(2016年33期)2016-12-19 03:34:52
亞太教育(2016年33期)2016-12-19 02:16:43
科技視界(2016年26期)2016-12-17 16:49:46
東方教育(2016年3期)2016-12-14 14:39:07
新教育時代·教師版(2016年35期)2016-12-07 21:59:58
新教育時代·教師版(2016年30期)2016-12-05 12:11:59
商情(2016年39期)2016-11-21 09:34:03
電腦知識與技術(shù)(2016年25期)2016-11-16 15:33:56
考試周刊(2016年85期)2016-11-11 02:19:28
科技視界(2016年18期)2016-11-03 23:15:51
