基于SolidWorks的存碼垛機械手結構設計
2017-01-17 19:55:03劉慧梅陳艷張榮
東方教育 2016年20期
劉慧梅+陳艷+張榮
摘要:本文利用SolidWorks對用于箱類和袋類物品取放的存碼垛工業機器人本體進行結構設計。存碼垛工業機器人本體主要有基座、腰部、大臂、小臂、末端執行器、等部件組成。本設計對工業機器人的研究有一定的參考價值。
關鍵詞:應用型本科;創新能力;機械制造基礎;教學改革
1 Solidworks軟件簡介
SolidWorks是法國達索公司最先在Windows系統上開發的一款三維設計軟件。其CAD功能方面涵蓋了所有的設計類型,實體建模、曲面設計、二維工程圖、裝配、運動仿真、結構分析等功能一應俱全。創新的自頂向下設計過程使得設計工作一目了然,實時的更新功能使得工程師可以隨時對產品特征參數進行動態修改。除此之外,SolidWorks還為不同的設計人群提供不同的功能模塊,包括鈑金、管道布線、電氣設計等,使得設計過程簡潔而豐富。
2 碼垛機器人的發展
國外,最早將工業機器人技術用于物體的碼放和搬運是日本和瑞典。1968年,日本第一次將機器人技術用于碼垛作業。1974年,瑞典ABB公司研發了全球第一臺全電控式工業機器人IRB6,主要應用于物品的取放和物料的搬運。隨著計算機技術、工業機器人技術以及人工智能控制等技術的發展和日趨成熟,日本、意大利、德國、美國、瑞典、韓國等國家在碼垛機器人的研究上做了大量工作,相應推出了自己的碼垛機器人,如日本的FANUC和OKURA以及FUJI系列,德國的KUKA系列,瑞典的ABB系列等。工業機器人技術的飛速發展,使得碼垛機器人在各個行業都得到了廣泛的應用。
3 碼垛機器人的工作對象
本文設計的碼垛機器人的工作對象及其參數如下:
(1)碼垛物品:箱類物品(如一箱紙巾)和袋類物品(如一袋洗衣粉)等。
(2)物品尺寸:長為200至500mm,寬為200至400mm,高為100至300mm。
(3)物品質量:每件物品為5至15kg。
(4)物品運動范圍:以機器人為中心的,半徑為3m,角度為90至180度。
4 碼垛機器人結構設計
本文設計的碼垛機器人為關節型機器人,這類機器人占地面積小、機構緊湊,工作空間大,還能穿過障礙物進行抓取,是機器人中使用最多的一種結構型式。碼垛機器人的本體(即機械手)包括基座、腰部、大臂、小臂、末端執行器(俗稱爪子),它的運動主要由碼垛機械手手臂的俯仰運動和腰部的旋轉運動組成。
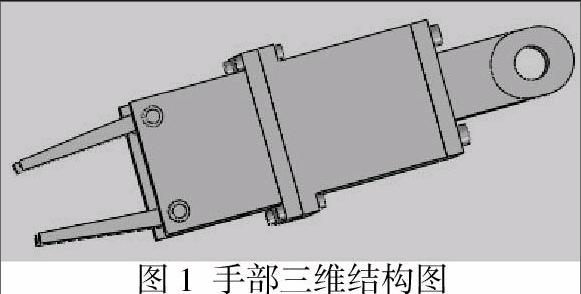
4.1 手爪的結構設計
機械手臂末端抓取器大致可分為:夾鉗式、專用操作式、吸附式、仿生多指式四類。由于工作對象為箱式或袋式物品,只需要設計能從不同角度抓取物品的夾鉗式即可。其結構如圖1所示,可以抓取不同大小多個種類的箱式或袋式貨物。
4.2 臂部的結構設計
手臂部件(簡稱臂部)是機器人的重要執行部件,它的作用是支承腕部(關節)和手部(包括工件和工具),并帶動它們在空間運動,臂部還安裝一些傳動驅動機構,從臂部的受力情況來看,它在工作中直接承受腕,手和工件的靜動載荷,自身運動 又較多,所以受力情況復雜。
臂部主要是進行俯仰運動,這里采用鉸接活塞缸實現臂部的俯仰運動。該機構的特點是,工作范圍大、靈活性好。
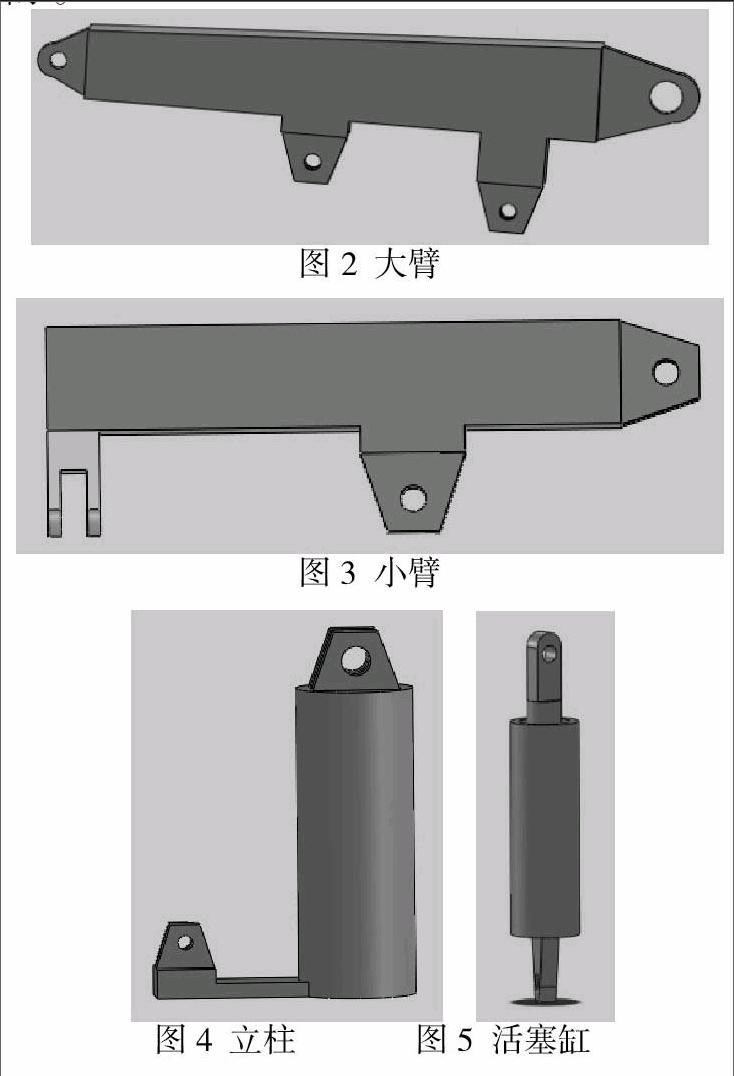
4.2.1 大臂的結構設計
大臂是臂部的組成部分,它兩端分別與小臂和立柱相連,它都是通過鉸鏈連接。大臂的運動是通過與立柱相連的鉸鏈活塞缸來進行運動傳遞的,它的運動軌跡就是一個圓弧形,通過活塞缸來進行俯仰運動,運動單一,結構簡單。它較之小臂粗大,因為它是碼垛機器人主要的受力部分之一。其三維結構如圖2所示。
4.2.2 小臂的結構設計
小臂兩端是與大臂和末端執行器連接,這里采用鉸鏈連接,大臂與小臂之間的運動傳遞,采用鉸接活塞缸來實現,其結構簡單,運動性能好。小臂比之大臂在設計時材料消耗要比大臂少,體積也小,重量輕。其三維結構如圖3.5所示。
4.3 立柱(腰部)的結構設計
立柱主要是支撐大臂小臂的重量,連接大臂和底座,并且固定了活塞缸的運動范圍。結合要求與設計過程,腰部的結構材料為合金結構鋼,無經淬火與回火處理。其三維結構如圖4所示。
4.4 活塞缸的設計
本次設計,我采用最多的動力傳動方式就是活塞缸,因為它工作形式單一,只能進行伸縮運動,且結構簡單,由缸體和活塞缸組成,并且它在機器人的設計中運用很廣泛。其三維結構如圖5所示。
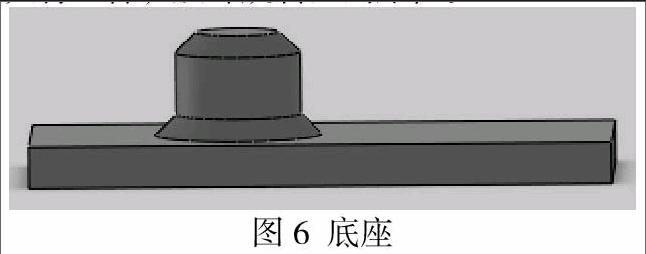
4.5 底座的結構設計
底座是承受碼垛機器人整體重量的主要部件,且由于碼垛機器人的手臂長,導致機器人整體重心并不在底座中線上,所以底座較為寬大。其三維結構如圖6所示。基于底座在本次設計中的作用,選取底座的材料為鑄鐵,且設計底座尺寸為:長×寬×高= 280 mm×120 mm× 20 mm。
5 結論
碼垛機械手的總體結構如圖7所示,其運動是由腰部的旋轉、手臂的俯仰、末端執行器的夾緊和放松組成。碼垛機器人工作的全部流程:第一步,大臂處的活塞桿運動,帶動小臂進行下伏運動,從而末端執行器接近物品,并通過夾緊缸將物品抓取;第二步,大臂進行上仰運動,帶動物品上升;第三步,腰部回轉缸進行回轉運動,將物品移到堆放指定區域上空;第四步,大臂又下伏,將物品放在堆放臺上,并且夾緊缸放松物品,最后大臂上仰,腰部旋轉回到原位。
參考文獻:
[1] 殷際英,何廣平.關節型機器人[M].北京:化學工業出版社,2003.7.
[2] 侯國柱.關節型機器人的結構設計及其運動學分析[D].內蒙古工業大學,2007.
猜你喜歡
中學生學習報(2022年14期)2022-04-15 22:07:51
化工管理(2021年7期)2021-05-13 00:44:44
信息化建設(2019年2期)2019-03-27 06:23:58
北方音樂(2017年4期)2017-05-04 03:40:28
大學教育(2016年11期)2016-11-16 20:31:44
科教導刊(2016年25期)2016-11-15 17:32:08
中國市場(2016年36期)2016-10-19 04:33:08
成才之路(2016年25期)2016-10-08 09:51:08
科技視界(2016年20期)2016-09-29 12:59:03
科技視界(2016年20期)2016-09-29 11:20:38
