微小型主動閥壓電泵的試驗控制系統(tǒng)的研究
2017-05-30 22:16:23何麗鵬李慧茹趙達李威黃勇
科技風 2017年22期
關鍵詞:反饋
何麗鵬 李慧茹 趙達 李威 黃勇
DOI:10.19392/j.cnki.16717341.201722094
摘要:為了配合微小型壓電泵的振動變形的需要,本文以單片機為核心部件,在硬件電路基礎上,以VS C#語言為編程工具,對其關鍵的模塊和用戶界面進行了設計,設計了一套適合于微小型主動閥壓電泵的試驗控制系統(tǒng),主要功能是使調(diào)節(jié)的電壓、頻率以及交變信號的相位差更加方便更加靈活,系統(tǒng)主要利用了上位機系統(tǒng)對壓電振子的微小變化進行實時監(jiān)控,并且能根據(jù)傳感器的信號反饋使電信號的頻率自動調(diào)整,最后測試了該系統(tǒng)的性能。經(jīng)過實驗和使用證明該控制系統(tǒng)的各項指標可以滿足精度要求較高的輸送流量的場合。為未來主動閥壓電泵的控制系統(tǒng)的研究提供了一種嶄新的方法。
關鍵詞:控制系統(tǒng);頻率;電壓;反饋
中圖分類號:TH38文獻標識碼:A
壓電泵是壓電驅動技術的一個十分重要分支,在微小型機電液系統(tǒng)中(MEMS)有十分廣泛的應用。近些年,壓電泵的研究領域中閥的研究逐漸升溫,由此,國際上也展開了大量的對主動閥的壓電泵的研究[18]。其中最具代表性的是,日本Seiko Instruments 公司的Jun Shinohara和 Masayuki Suda等人在2000年成功研制了基于壓電片的常閉主動閥壓電泵,2005年,蠕動式主動閥壓電泵被德國的M. Richter和Y. Congar等人設計制造,以及在2005年,壓電疊堆驅動式主動閥壓電泵被東京科技大學的Yosida等人成功研制。本文主要研究了一種基于圓形壓電雙晶片的主動閥壓電泵的試驗控制系統(tǒng),并對其中的設置的參數(shù)進行重復試驗,并且對比、分析和驗證實驗系統(tǒng)的效果。
1 系統(tǒng)主程序界面設計
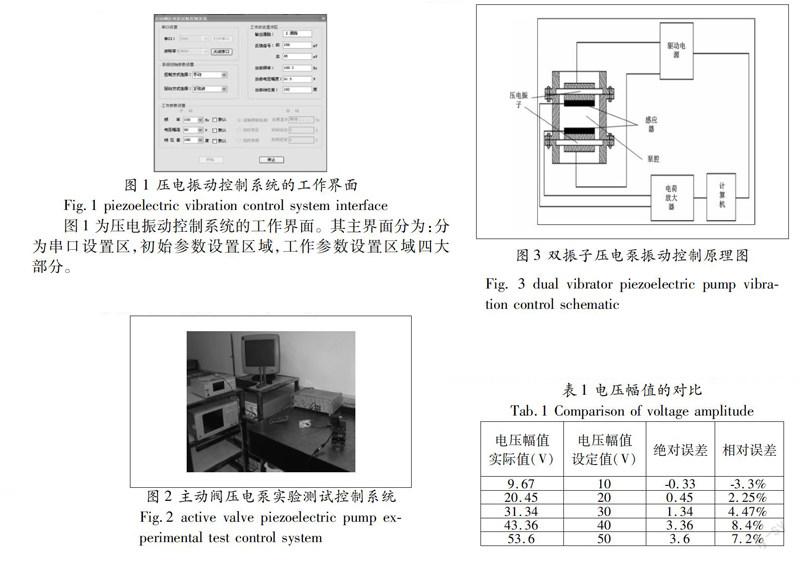
圖1為壓電振動控制系統(tǒng)的工作界面。其主界面分為:分為串口設置區(qū),初始參數(shù)設置區(qū)域,工作參數(shù)設置區(qū)域四大部分。
2 測試內(nèi)容和測試裝置
圖2為主動閥壓電泵實驗測試控制系統(tǒng)的組成,其系統(tǒng)主要由信號發(fā)生器、功率放大器、數(shù)模轉換器、高精度數(shù)字萬用表、示波器以及天秤測量等幾部分組成。
2.1 測試原理
在對微小型主動閥壓電泵進行控制實驗時,制作了一個單腔體壓電泵,以壓電振子作為實驗對象,并且在泵膜外側粘貼了一些應變片作為感知傳感器,用來探測其振動的變形,并把該信號通過電荷放大器進行整流、放大,使之變成一個電壓低于5V的直流電壓信號經(jīng)過A/D轉換傳達給計算機。從而達到主動控制振動的目的。如圖3所示,雙振子壓電泵控制原理。
在實驗中,通過手動設置和改變壓電泵輸出電壓的振幅值項,然后用高精度數(shù)字萬用表來測量其輸出電壓的有效值,經(jīng)公式換算得到電壓得振幅值,表1為電壓幅值的對比結果。
由上表的數(shù)據(jù)可以得,設定值與實際的電壓幅值存在一定的誤差,出現(xiàn)此現(xiàn)象主要是由于此系統(tǒng)的輸出信號的電壓幅值是通過調(diào)節(jié)總阻值為2K的數(shù)字電位器的阻值來調(diào)節(jié)的,又因為串口傳輸字節(jié)的限制,每次調(diào)節(jié)組織至少要20,所以在理論上輸出電壓的幅值只能達到1.8V的分辨率,輸出電壓也是因為這個原因導致的誤差;另外,此系統(tǒng)的輸出電壓產(chǎn)生影響的原因還有對帶通濾波電路中心頻率的選擇。
2.2 輸出信號頻率
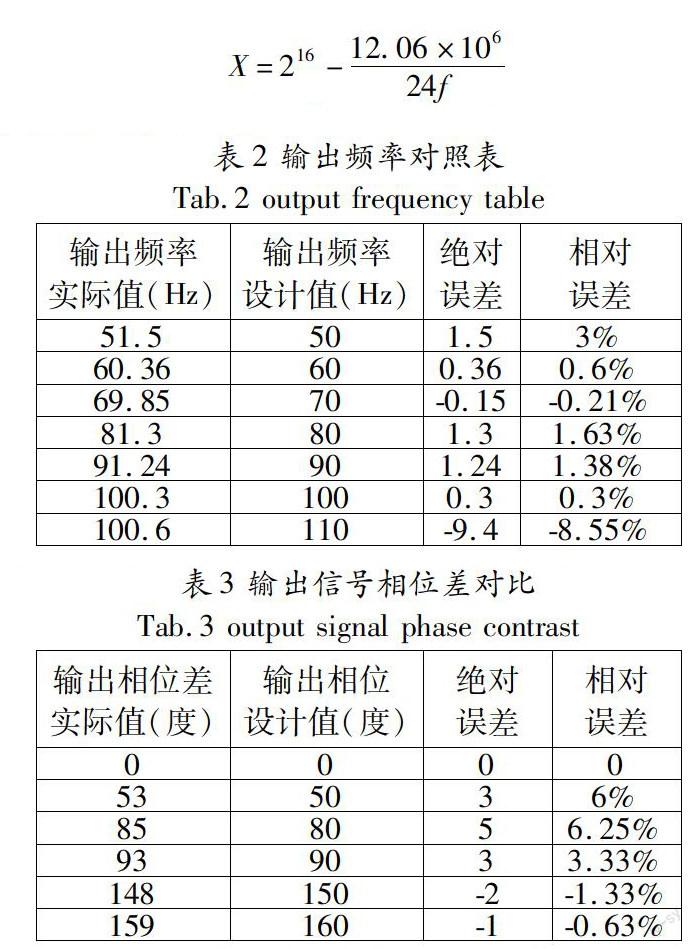
在控制系統(tǒng)的界面上,根據(jù)一些前面實驗的經(jīng)驗值,手工設定一些輸出信號的經(jīng)驗頻率,再把這些輸出信號的經(jīng)驗頻率值用信號發(fā)生器來檢測,得到結果如表2所示。從以上數(shù)據(jù)可知,頻率的實際值與設計值也存在著一定的誤差。分析這些誤差主要原因可得:本文為了使串口通訊的參數(shù)設置更加簡單、方便,系統(tǒng)采用12.06MHz時鐘。當輸出信號頻率為f時,T0時刻初值X的計算公式為
由于在計算中大部分數(shù)據(jù)是都是精確到小數(shù)部分的百分位或千分位,在十六進制數(shù)的轉換過程中,本文采用四舍五入,因此導致了最后不同于理論計算輸出的頻率,但是從該實驗結果來看,其誤差是很小的。
2.3 輸出信號相位差
在控制系統(tǒng)的界面上,根據(jù)一些前面實驗的經(jīng)驗值,手工設定一些輸出信號的相位差,然后用示波器對其輸出信號的波形進行觀察和探測,得到實際相位差的結果如表3所示。
從以上表中的數(shù)據(jù)可知,相位差的實際值也與設計值也存在著一定的誤差。分析主要誤差原因是由于功率放大器本身存在相位偏移,導致每個分路功放的相相位偏差不一致。
3 總結
為了配合微小型壓電泵的振動變形的需要,設計了包括上位機(即PC機)程序和下位機(即單片機)程序的驅動控制系統(tǒng)的軟件部分對其關鍵的用戶界面和模塊進行了優(yōu)化設計。該系統(tǒng)的功能主要有:實現(xiàn)了對輸出信號頻率、相位差、電壓幅值的手動調(diào)節(jié);實現(xiàn)了對當前工作狀態(tài)的實時監(jiān)控與顯示;也實現(xiàn)了在線檢測對壓電振子的變形。最后測試了該系統(tǒng)的性能。經(jīng)過實驗和使用證明該控制系統(tǒng)的各項指標可以滿足精度要求較高的輸送流量的場合。
參考文獻:
[1]彭太江,闡君武,楊志剛.新型壓電一流體混合驅動精密位移機構[J].農(nóng)業(yè)機械學報,2005.36(2):5154.
[2]高建民,任寧,諶志偉.無閥微壓電泵關鍵部件工作過程仿真[J].農(nóng)業(yè)機械學報,2008.39(2):130133.
[3]程光明,姜德龍,孫曉鋒,等.雙腔體四振子壓電泵設計及試驗[J].排灌機械工程學報,2010,28 (3):190193.
[4]溫建明,程光明,闞君武,等.主動閥壓電泵閥體分析[J].排灌機械工程學報,2010, 28 (3):224227.
[5]unwu Kan,Kehong Tang,Guojun Liu etal. Development of serialconnection piezoelectric pumps.Sensors and Actuators A Physical. 2008, 144 (2):321327.
[6]景石,程光明,沈傳亮,等.壓電驅動型胰島素泵的研究[J].西安交通大學學報,2007,41 (5):602605.
[7]溫建明,程光明,馬繼杰,等.雙腔串聯(lián)壓電胰島素泵性能分析與試驗[J].排灌機械工程學報,2012,30 (3):279282.
[8]Jun Shinohara, Masayuki Suda, Kazuyoshi Furuta, etal. A high pressureresistance Micropump using active and normallyclosed valves.Microelectromechanicalsystems[C].The thirteenth annual international conference on MEMS, 2000, (2327): 8691.
[9]M.Richter, Y. Congar, J. Nissen, etal. A multimaterial micropump for applications in microfluidics[C].First international conference on multimaterial micro manufacture,2005:397400.
[10]M.Herz, M. Richter, E. Jung, etal. Report on the development of a low cost micropump, 2006, www.izmm.fraunhofer.de[Z].
[11]何麗鵬.微小型主動閥壓電泵的結構設計理論及控制系統(tǒng)的研究[D].吉林大學, 2010.
猜你喜歡
小學教學參考(綜合)(2016年12期)2016-12-26 13:55:03
讀寫算·素質(zhì)教育論壇(2016年24期)2016-12-23 22:23:56
現(xiàn)代企業(yè)文化·理論版(2016年20期)2016-12-20 18:27:30
中文信息(2016年10期)2016-12-12 11:43:48
讀與寫·上旬刊(2016年10期)2016-11-25 13:22:51
散文百家·下旬刊(2016年9期)2016-11-23 00:57:52
新聞愛好者(2016年10期)2016-11-18 15:23:28
電子技術與軟件工程(2016年18期)2016-11-14 23:55:23
考試周刊(2016年86期)2016-11-11 09:33:05
知音勵志·社科版(2016年9期)2016-11-09 06:41:39