紅外遙控避讓玩具車的概念模型設計
2018-10-20 09:31:20董婧雯
數碼設計 2018年9期
關鍵詞:工業設計
董婧雯


摘要: 隨著人工智能Alpha Go一路過關斬將,戰勝圍棋界翹楚,人工智能產品在全球掀起狂潮。為探究智能遙控車的工作原理及發展前景,文章以紅外遙控避讓玩具車為出發點,從心理學、人機協調、設計美學及工業制造等方面分析了紅外遙控避讓玩具車概念模型的可行性。該玩具車售眾為兒童,在兼顧外觀美觀的同時,其紅外線自動避讓功能也保證了產品的安全性,順應了產品智能化這一潮流,使產品具備了更高的吸引力與文化內涵。
關鍵詞: 紅外遙控;紅外避讓;玩具車;概念模型;工業設計
中圖分類號: TP368.12;TP872?? ?文獻標識碼: A?? ?文章編號: 1672-9129(2018)09-0046-02
Absrtact: ?with the passing of artificial intelligence Alpha Go, victory over go world leader, artificial intelligence products in the world set off a frenzy. In order to explore the working principle and development prospect of intelligent remote control vehicle, the article takes infrared remote control to avoid toy car as the starting point, from psychology, human-machine coordination, The feasibility of the concept model of infrared remote control avoiding toy car is analyzed in the aspects of design aesthetics and industrial manufacture. This toy car is sold as a child, its infrared ray automatic avoidance function also ensures the safety of the product, conforms to the trend of intelligent product, and makes the product have higher attraction and cultural connotation.
Key words: ?infrared remote control; infrared avoidance; toy car; conceptual model; industrial design
1 引言
人類社會在發展進程中,自動機械化大幅度替代了單調的手工操作,生產生活中越來越多的產品正逐步被人工智能理念所替代,其中市場中具有自動倒車入庫功能的產品已經引起了軒然大波,傳統的全手動操控產品已經無法維持市場優勢和地位。為加深對智能遙控車的工作原理及發展前景的理解,本文提出了紅外遙控避讓玩具車這一概念模型。該模型增添了無人化遙控的優勢,發展潛能巨大,借助紅外遙控編碼解碼及紅外自動避讓系統,改進了傳統玩具小車在遙控便捷程度和使用安全方面的不足,保障了兒童的使用安全。該模型在構建過程中應用Arduino單片機來實現程序的操作運行,通過在Mixly軟件中編寫的程序上傳到電路板,并與Arduino單片機連接的紅外傳感器感知外界環境,進而由馬達舵機等裝置反饋給環境,實現“人—機—環境”一體化。在研制過程中,雖然該模型具有自動避讓功能,卻還是離不開人工操作,需要人與機器的共同協調,這也是下一步努力開發、改進的方向。
2 設計方案
2.1總體結構.產品控制系統應用的元部件有紅外發射器(多按鍵遙控器)、紅外接收器、紅外傳感器(應用于紅外避讓功能)、電池盒及電池、Arduino單片機及若干導線,其基本安裝結構如圖1所示。其中小車前兩小輪為萬向輪,后兩小輪為被馬達驅動的車輪,采用兩輪驅動兩輪轉向模式。該模式雖無法實現較為復雜的轉彎,但足以滿足兒童玩具的需要。兩個驅動輪通過舵機與馬達連接,其中萬向輪旁邊各有一個紅外傳感器,車尾安裝紅外接收器。
2.2紅外避讓系統設計原理。目前常見的避讓系統大都應用超聲波測距原理,即小車發出超聲波撞到障礙物后反彈,通過計算兩者時間差從得到小車與墻壁的瞬時距離,隨后執行具體指令,如下圖2所示。當距離小于或等于某一定值時小車停止運動(也可自定義為倒車等動作)。
本車應用的是紅外避讓系統,該系統與超聲波并無太大區別,只是超聲波系統改變距離臨界值數據需在程序中進行修正,而紅外避讓器可在設備外手動調節。該系統增添了一些人機交互的功能,使產品更為人性化、智能化。其原理與超聲波測距避讓系統十分相似,具體可參見文獻[1],這里不過多贅述。在此主要說明本車安裝雙紅外的意圖:在程序中設計兩套系統,使得左側紅外避讓儀感知到障礙物時小車向右后倒車,右側紅外避讓儀感知到障礙后向左后倒車,這種做法改善了紅外傳感器的區域局限性,同時也避免了兒童操作不當帶來的對產品的損傷或是人身安全的損害,提高了產品的使用期限。
2.3紅外遙控系統設計原理。紅外發射器和紅外接收器組成紅外遙控系統,其中紅外發射器可根據使用者指令發出頻率不同的紅外線,接收器接收到相應指令后行使相應功能。首先,利用傳感器或其它途徑測定指定按鍵發出的紅外線的編碼(以一組十六進制數呈現),從而保證系統準確無誤地被系統接收而不受外界環境的干擾。其次是編程環節,該系統運用Mixly軟件進行編程(Mixly圖形化編程工具描述詳見文獻[2]),使系統接收到指定頻率的紅外線后執行如圖3所示的數字輸出和模擬輸出:舵機旋轉角度、輪胎轉速,從而達到小車“被遙控”的效果。
舉個例子:首先利用紅外接收器在串口監視器中得到按鍵“↑”發出的紅外線的十六進制脈沖碼“0xFD807F”,若接收到紅外線則執行“goAhead”函數,其中函數名稱為用戶自定義,如圖4所示(用戶可自定義為“轉速、舵機角度”)。
2.4產品色彩構型設計。在群眾審美變化方面,社會環境、民族文化和生理心理變化等都會影響到群眾對于審美的變動。考慮到玩具車的消費人群為兒童,在不同灰度的色彩中,兒童的視覺對明亮的顏色的敏感度更高,如圖5色彩對比所示,明度較高的四種顏色會使人瀏覽時感到更輕松愉快,“主要的視覺必須最突出,最具有吸引力,而且只能有一個”[3],因此該模型在設計過程中選擇能夠第一時間引起視覺敏感的正紅色作為主題車身的顏色,其余輔助顏色為次要中心。根據心理學原理,紅色更容易引起人興奮和激動,因此在兒童使用該玩具車時更易產生心理上的愉悅感,增強使用感受。在設計裝飾花紋時考慮到玩具車的行駛速度受限,我決定采用”動態線“來增加玩具車的流暢感和速度感,使玩具車最基礎的特點得到展現。如下圖:下方小車相較上方明顯更具動感。
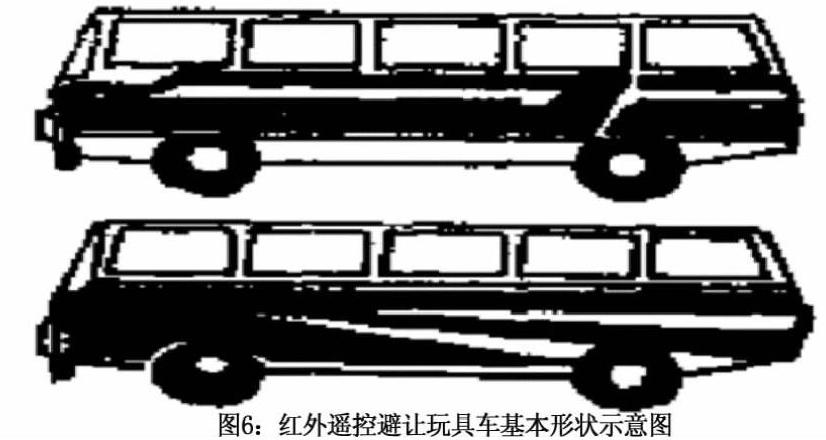
在該模型構型方面主要考慮產品的穩定性。“穩定是指造型物上下間的關系”[3],為保證造型物的實際穩定及視覺穩定,該模型將Arduino單片機、紅外傳感器及電池盒等重量較大的物體固定在車的地板上,而數據線和電源線這類可彎折靈活原件利用保護管固定在車殼內表面。玩具車的基本形狀采用底寬高窄的梯形,具體構型如圖6所示,下部采用深色著色,并增加上文中的“動態線”裝飾,上部則采用淺色著色并余留大片空白,簡單來說就是“下繁上簡”,使使用者從視覺上產生下重上輕,車身十分穩重的心理暗示。
2.5控制器設計。該模型的控壓器裝置采用按壓控制器中的按鈕控制器。由圖7和表1可知,這類控制器的視覺辨別位置較好但觸覺辨別位置較差,因此可選用顆粒感磨砂感較強的材質制作按鍵表面以彌補按鈕控制器的缺陷,同時也發揮這類控制器的優勢,使其操作界面簡潔明了。例如幼兒看到按鍵“↑”可以輕松聯想到“goAheah”所代表的前進功能。
3 軟件設計
本車程序應用北師大自主研發的中學生編程軟件Mixly而完成。該程序由紅外遙控和紅外避讓兩部分組成。其中紅外避讓優先級更高,即當遇到障礙物時會先執行倒退指令而非用戶控制器輸入的指令,保證了無論在何種操縱環境下能做到先保證安全,再判斷可控制性。本人多次實驗并改良參數(紅外傳感器相應的距離臨界值),證實該軟件結構具有合理性。
4 設計主要創新特征
在人機協調可持續發展分析方面,為適應時代發展的需要,本車設計時做出以下創造性工作。一是適應科學技術的發展。工業設計過程中需依附新技術的應用,概念模型應用紅外避讓傳感器可達到基礎層面的人工智能效果。二是產品功能的轉化。玩具車大多功能專一,而概念車具有強大的發展空間,能夠添加更多的功能。
5 結論與展望
該模型結構簡單,制作簡便,構件價格低廉。我根據該模型制作了初步樣機,能順利實現紅外遙控和自動避讓功能。此外,小車內部程序也簡潔易懂,易于擴展升級,可根據不同需求增加不同傳感器和原件,實現更多方面功能,例如:行駛時播放音樂、行駛時吸附垃圾碎屑等,這些設想我都分別制作了不同小車并進行了相應實現,但卻未能將這些功能很好的融合在一個小車上并達到和諧的統一,這也是我未來研發思考的方向。
參考文獻:
[1]張珩,劉亞杰.AT89C52 超聲波測距倒車防撞報警系統[J].現代電子技術,2010(3):205-210.
[2]傅騫,羅開亮,陳露.面向創客教育普及的Mixly 圖形化編程工具開發[J].2016,26(1):120-126.
[3]王曾,徐江才.工業設計[M].安徽:安徽美術出版社,2004.
猜你喜歡
藝術科技(2016年10期)2016-12-14 23:33:49
藝術科技(2016年10期)2016-12-14 23:32:59
藝術科技(2016年10期)2016-12-14 23:02:16
成長·讀寫月刊(2016年11期)2016-12-14 22:42:07
現代經濟信息(2016年25期)2016-11-24 07:33:31
藝術科技(2016年9期)2016-11-18 15:22:56
人間(2016年27期)2016-11-11 16:38:36
文藝生活·中旬刊(2016年9期)2016-11-07 03:31:21
文藝生活·中旬刊(2016年9期)2016-11-07 03:28:27
藝術與設計·理論(2016年10期)2016-11-04 16:29:48
